一种无线便携式单髁膝关节置换术中力线轨迹测量系统
文献发布时间:2023-06-19 10:40:10
技术领域
本发明属于医学电子以及电子系统集成技术领域,特别涉及一种无线便携式单髁膝关节置换术中力线轨迹测量系统。
背景技术
膝关节长时间承受压力容易导致其磨损受伤,严重的可能发展为骨关节炎。预计在未来几十年内,膝关节炎的患者人数将呈指数增长。最常见的膝关节手术治疗方法包括全膝关节置换手术(total knee arthroplasty,TKA)、高胫骨截骨手术(high tibialosteotomy,HTO)和单髁膝关节置换手术 (unicondylar knee arthroplasty,UKA)。据统计,到2035年,全球每年进行的膝关节置换手术可能会超过300万次。单髁膝关节置换手术与全膝关节置换手术相比是微创手术,所以在骨骼和组织方面的保护较多,通常能以更少的侵入性来实施手术,以减少术中创伤出血与术后疼痛,加快临床恢复速度。单髁膝关节假体的改进和外科手术辅助工具的进步,使得单髁膝关节置换手术成功率得到提高。
传统的植入假体位置检测方法是有限元分析,但由于骨关节的有限元分析需要扫描全部关节组织与假体模型,而单髁膝关节置换手术是一种微创手术,无法在术中对全部假体与关节组织进行有限元压力扫描建模,所以模型准确度不高。并且有限元分析计算数据量较大和计算复杂度较高,因此将它用于单髁膝关节置换手术中的实时测量是不切实际的。
不同于传统的基于形状和材料建立压力模型的有限元分析方法,在单髁膝关节置换手术中,假体垫片外壳上表面的力线轨迹同样是判断假体位置的关键指标,所以用基于传感器的测量装置来实时测量力线轨迹是一种有效的方法。到目前为止,主要有两种基于传感器的测量装置可用于测量单髁膝关节置换手术中的力线轨迹。一种是机器人辅助测量装置,它帮助骨外科医生规划手,提高植入物定位的准确性。然而,使用机器人手术辅助测量系统的医生需要接受专业培训,使用复杂度较高,价格昂贵。此外,由于其尺寸较大,在手术期间不方便使用。另一种就是便携式无线力线轨迹测量系统,与本发明最接近的现有技术CN 109758274A公开了一种单髁膝关节置换术中股骨远端相对于假体垫片力线轨迹的测量方法与系统,硬件系统主要由阵列式压力传感器、数据传输与接口电路、射频收发机与PC组成。轨迹测量算法主要用到了两次最小二乘拟合,第一次最小二乘拟合用来得到压力分布数据与压力最大点坐标,该方案中认为压力最大点就是接触点,进行第二次最小而成拟合,获得最终的力线轨迹。此方法可以实时获取股骨假体相对于假体垫片的运动轨迹,并以获取的轨迹与标准轨迹进行对比,以此为参考进行股骨假体、假体垫片与胫骨假体的安装,确定安装位置与角度。然而,其缺点在于系统集成度较低,功耗较高,速度与准确度仍有提高空间。
发明内容
为了克服上述现有技术的缺点,本发明的目的在于提供一种无线便携式单髁膝关节置换术中力线轨迹测量系统,可以采集患者在手术过程中,股骨假体远端相对于假体垫片压力分布数据,再将数据在硬件上处理为力线轨迹数据,编码打包后再通过无线传输的方式发送至数据记录仪,最后传输至个人计算机端存储并实时显示力线轨迹,来帮助医生在手术过程中判断假体位置是否合适。本发明通过设计专用控制逻辑与接口芯片以及与射频发射芯片做系统级封装,可大大提高系统集成度,减小系统体积,降低系统功耗且减少板级电路干扰。
为了实现上述目的,本发明采用的技术方案是:
一种无线便携式单髁膝关节置换术中力线轨迹测量系统,包括数据采集处理与无线发送模块和数字接收与展示模块,其特征在于:
所述数据采集处理与无线发送模块包括:
压力传感器阵列,放置于假体垫片内,实时测量假体垫片凹面的压力分布,输出电阻值;
多路模拟开关,以设定频率扫描轮询各压力传感器,选中某一个阵列点时,用电阻分压的方式将阵列点电阻值转化为模拟电压值;
模数转换器,将测量的模拟电压值转换为数字电压值;
算法硬件实现电路,硬件化最小二乘拟合算法,将压力分布数据转化为力线轨迹数据;
系统级封装芯片,配置系统工作模式,控制系统整体工作流程,无线发送力线轨迹数据;
所述数字接收与展示模块通过无线方式接收并展示所述力线轨迹数据。
所述最小二乘拟合算法步骤如下:
首先将假体垫片上表面模型简化为球面的一部分,在获得到压力分布数据后,将压力当作坐标的函数,进行如下式的拟合:
F=ax
F代表压力值,x,y,z代表球面三维坐标,多项式的系数a,b,c,d,e,m 通过扫描得到压力传感器阵列点数值求得,在x,y,z坐标范围内拟合该多项式可得到压力分布,压力最大值通过求极值的方法求得;
使用最大压力点作为接触点,将接触点拟合成轨迹,其中在求解函数极值时,用坐标平移与压缩变换来减少系数矩阵的病态程度:
其中
其中
所述算法硬件实现电路实现的算法包括压力最大点定位算法与轨迹拟合算法两部分,两部分的核心算法均为最小二乘拟合算法,在最小二乘拟合算法中,核心是
Ax=y
其中A是维度为N×N的系数矩阵,x是待求解向量,y是已知常数向量,利用LU矩阵分解法将系数矩阵A分解为两个矩阵,其中一个是上三角矩阵U,上三角矩阵U中对角线以下的所有元素等于0,另一个是下三角矩阵L,下三角矩阵L中对角线以上的所有元素都等于0,则上式转化为:
LUx=y
继续转化为:
Lk=y
最终转化为求解:
Ux=k
k为中间求解结果矩阵。
所述算法硬件实现电路包括LU矩阵分解模块与求解模块两个部分,其中,求解模块用于最终结果计算,LU矩阵分解模块用来进行系数矩阵分解计算,LU矩阵分解模块主要包括以下部分:
两个动态随机存取存储器DRAM,为片外结构,用来存储由模数转换器发送来的压力分布数据,由于压力分布数据量较大,无法直接存储在片上,所以将其存储在片外。其用FPGA开发板上的DDR2实现,以乒乓方式工作,即其中一个DRAM中的输出数据将成为另一DRAM的输入数据,提高系统数据吞吐量;
数据获取控制模块,控制DRAM与计算阵列之间的数据传输,由于算法硬件实现电路部分工作时钟远大于模数转换器时钟,所以需要缓冲中间数据,其包括状态机和3个不同功能的异步FIFO存储器FIFO_W、FIFO_R和 FIFO_M,分别用于缓存写入计算阵列的数据、缓存读出计算阵列的数据、暂存中间计算结果数据,将系数矩阵分解为多个可以片上存储与运算的子矩阵,按照在系数矩阵中的子矩阵的空间顺序,即从上到下,从左到右的空间顺序,状态机控制循环结构遍历迭代空间中所有的子矩阵;
两个存储器控制模块,分别控制两个所述DRAM缓冲因处理速度不同而需要缓冲的数据,且处理不同位宽数据流;由于DRAM与模数转换器和算法硬件实现电路工作速度不同,数据位宽也不同,所以需要该两个存储器控制模块;
计算阵列模块,包括64个并行工作的处理单元以及三个分别用于缓存用来存储的数据、用来计算的数据和用来传输的数据的buffer,三个buffer并行工作,在存储与传输中间计算结果的同时还能够计算数据,从而提高矩阵分解速率,64个处理单元中,由于除法器在硬件实现中需要大量硬件资源以及速度较慢,所以仅处理单元PE_0使用一个除法器,其余处理单元利用PE_0 的计算结果进行倒数运算;
LU控制模块,控制计算阵列模块的整体工作流程,包括内部三个缓存器的数据交互以及64个处理单元的计算过程。
所述处理单元PE_0的输入数据是16位浮点数,因此为了使所有处理单元并行工作,片外存储器即两个DRAM的数据宽度为16×64位。
所述求解模块中的处理单元的数量与LU矩阵分解模块中的处理单元数量相同,且求解模块中的每个处理单元的输入数据与LU矩阵分解模块中每一个处理单元的输出数据一一对应计算,来自LU矩阵分解模块的数据作为求解模块的输入数据,将计算出的力线轨迹数据基于SPI接口发送到射频发射芯片。
所述系统级封装芯片由两颗专用集成电路芯片组成,一颗是控制逻辑和接口芯片,采用TSMC 65nm CMOS技术工艺制作,管芯面积为1.351mm× 1.351mm,它控制系统的工作流程,配置系统的工作模式,通过SPI协议配置射频发射芯片与模数转换器,通过串行接口从模数转换器读取压力分布数据,基于自定义数据传输协议将数据传输到射频发射芯片,在空闲阶段,即无需任何数据采集和传输,该芯片在1.1V电源下,消耗约0.031mA电流,在工作模式下,消耗0.076mA电流,该芯片中除了系统工作流程控制电路与接口电路之外,还有线性反馈移位寄存器电路,用于生成为随机数据与循环冗余校验,提高传输数据抗干扰能力,由于传输压力分布数据过多且数据分布不均匀,于是增加8b/10b编码电路保证稳定的直流均衡,提高对误差的容忍能力以及最大化信道带宽利用率;另一颗是射频发射芯片,主要包括数字基带电路,发射机电路,电源管理电路和晶体振荡器。
所述系统级封装芯片使用方形扁平无引脚封装方式将两颗专用集成电路芯片封装在一起,封装后,芯片面积为8.4mm×8.4mm,共有88个引脚,在封装过程中,为了减少信号的干扰,在芯片管脚排列方向的设计中尽可能减小信号线的交叉,关键信号引脚与外部引脚之间的距离尽可能短,以减少干扰噪声,为了保证射频信号的传输质量,封装后芯片的射频输出引脚应尽可能靠近芯片的四角。
所述压力传感器阵列感测假体垫片的外壳上表面不同位置的不同压力,所述压力传感器自上而下包括柔性垫、压感层、隔离层、线路层和背胶层,通过背胶层粘附于假体垫片内,所述阵列式压力传感器的引线接触面与多路模拟开关连接,供多路模拟开关扫描轮询阵列点。
系统工作流程包括空闲模式与发射模式,只有在需要无线发射力线轨迹数据时,才会启动射频发射机,降低功耗。
与现有技术相比,本发明的有益效果是:力线拟合速度更快,力线轨迹拟合精度更高,系统功耗更低,系统集成度更高,尺寸更小。
附图说明
图1为本发明力线轨迹示意图。
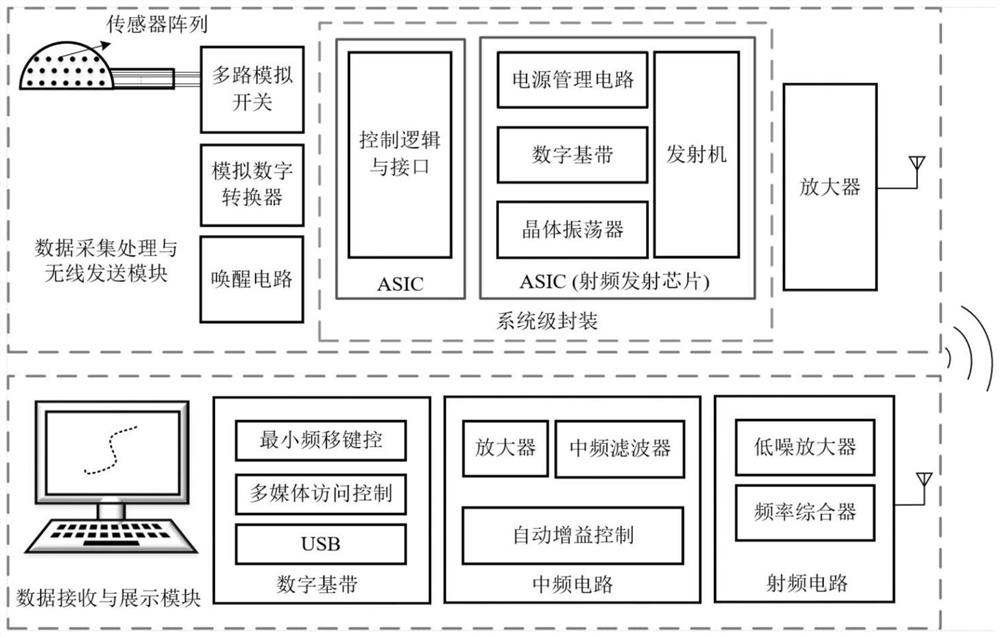
图2为本发明所应用系统整体框架。
图3为本发明系统工作流程图。
图4为本发明所用的定制压力传感器阵列,其中,(a)为正视图,(b) 为侧视图,(c)为等效电路图。
图5为本发明中专用控制逻辑与接口芯片显微图。
图6为本发明系统级封装芯片原理图。
图7为本发明简化的假体垫片模型与阵列点的分布图。
图8为本发明假体垫片上表面相对压力分布图。
图9为本发明压力最大点与力线轨迹图。
图10为本发明LU矩阵分解电路原理图。
图11为本发明求解模块电路原理图。
图12为本发明系统测试平台图。
图13为本发明实际产品外形与结构示意图。
具体实施方式
下面结合附图和实施例详细说明本发明的实施方式。
如图1所示,根据外科医生的经验,良好的力线轨迹是平滑的,并且位于假体垫片的中心,例如在所示的安全区域内。不好的力线轨迹具有明显弯曲和振动或偏移到假体垫片边缘,是由于材料不当或假体位置不当所致。轨迹的安全区覆盖中间区域,其高度约为10mm,并且分别与假体垫片的上下边界相距约5mm。
如图2所示,该系统包括两部分:第一部分是数据采集处理与无线发送模块,主要包括传感器阵列,模数转换器,多路复用开关,算法硬件实现电路,系统级封装芯片与放大器等。其中,压力传感器阵列置于假体垫片内,实时测量假体垫片凹面的压力分布,输出电阻值;多路模拟开关以设定频率扫描轮询各压力传感器,选中某一个阵列点时,用电阻分压的方式将阵列点电阻值转化为模拟电压值;模数转换器将测量的模拟电压值转换为数字电压值;算法硬件实现电路硬件化最小二乘拟合算法,将压力分布数据转化为力线轨迹数据;系统级封装芯片配置系统工作模式,控制系统整体工作流程,无线发送力线轨迹数据。第二部分是具有射频电路、中频电路和数字基带电路的数字接收与展示模块,数字接收与展示模块通过无线方式接收并展示所述力线轨迹数据,力线轨迹数据可通过通用串行总线接口发送到个人计算机以进行实时显示。
系统级封装芯片作为主控芯片,是本发明的重要组成部分,控制系统的工作流程,配置系统的工作模式,获取、传输并无线发送力线轨迹数据,其由两颗专用集成电路芯片组成。其中一颗是控制逻辑和接口芯片,另一颗是射频发射芯片,主要包括数字基带电路,发射机电路,电源管理电路和晶体振荡器。此系统级封装芯片可以用来控制系统的工作流程,配置系统的工作模式,数据传输与无线发送。
如图3所示,系统的工作流程分为两个阶段:第一个阶段是配置阶段。第二阶段是处理和传输数据阶段,系统有两种模式:空闲模式和传输数据模式,这两种模式组成一个周期。在不同的场景中系统可以工作在不同速度下,空闲模式的时间周期可以在外部配置,这意味着系统的工作周期也可以配置。传输数据模式的时长取决于发送数据量。由于系统的功耗主要来自射频发射机,因此在每个采样和传输周期内,它仅工作很短的时间,因此可以节省系统功耗。
压力传感器阵列感测假体垫片的外壳上表面不同位置的不同压力,如图4 所示,图(a)展示了为系统定制的压力传感器阵列的俯视图,传感器阵列具有二十个有效的传感器感应压力单元,图(c)所示相当于二十个压敏电阻器。压力传感器自上而下包括柔性垫、压感层、隔离层、线路层和背胶层,通过背胶层粘附于假体垫片内,假体垫片的外壳材料柔软,外界施加压力可以使其产生形变,传感器阵列增加柔性垫的目的是通过软垫测量假体垫片外壳的形变程度,内部压力传感器阵列可以感测其不同位置的不同压力。传感器感应压力单元分布在图(b)所示的感应层中。传感器阵列的柔性电路板接口有 22条引线,连接传感器内20个感应压力单元,以及还有两条公共线。在传感器上施加压力,公共线连接电源,通过电阻分压的方式,测量该点压力变化,阵列式压力传感器的引线接触面与多路模拟开关连接,供多路模拟开关扫描轮询阵列点。每个传感器阵列点的压力测量范围是0N到80N,手术过程中医生施加的压力在此范围之内。在特定的工作温度(即体温)下,包括非线性和偏移在内的测量误差不超过1N,传感器的精度和线性度也符合力线轨迹测量系统的标准,在实际应用中,传感器阵列完全密封在假体垫片外壳中,传感器与人体组织之间没有直接接触。因此,对传感器阵列的材料并没有特殊要求。工作过程中,多路模拟开关以一定频率轮询扫描传感器的接口,选中某一个阵列点时,用电阻分压的方式将阵列点电阻值转化为电压值,再使用模拟数字转换器将其转化为数字信号供后续处理。
压力传感器可以根据功能需求选择不同的数量和排列方式,区分假体内外侧压力分布,可采用横向排列方式;如若希望测量假体在胫骨上面的运动轨迹,可以通过纵向排列两个以上的传感器实现。也可以直接在内部使用矩阵型传感器阵列,传感器阵列需要满足两个指标1.测量精度2.测量范围。
如图5所示,控制逻辑和接口芯片采用TSMC 65nm CMOS技术工艺制作,管芯面积为1.351mm×1.351mm,它控制系统的工作流程,配置系统的工作模式,通过SPI协议配置射频发射芯片与模数转换器,通过串行接口从模数转换器读取压力分布数据,基于自定义数据传输协议将数据传输到射频发射芯片。测量结果表明,在空闲阶段,即无需任何数据采集和传输,该芯片在1.1V电源下,消耗约0.031mA电流,在工作模式下,消耗0.076mA电流,该芯片中除了系统工作流程控制电路与接口电路之外,还有线性反馈移位寄存器电路,用于生成为随机数据与循环冗余校验,提高传输数据抗干扰能力,由于传输压力分布数据过多且数据分布不均匀,于是增加8b/10b编码电路保证稳定的直流均衡,提高对误差的容忍能力以及最大化信道带宽利用率。
如图6所示,由于单髁膝关节置换手术是微创手术,所以对系统的集成度要求较高。在外围空间受限的情况下,减少芯片的外部组件和系统尺寸很有价值。因此,使用方形扁平无引脚封装方式将两颗专用芯片封装在一起,这既可以降低设计印刷电路板的复杂性和减少信号传输噪声,也可以提高系统集成度。封装后,芯片面积为8.4mm×8.4mm,共有88个引脚。在封装过程中,为了减少信号的干扰,在芯片管脚排列方向的设计中应尽可能减小信号线的交叉,关键信号引脚与外部引脚之间的距离应尽可能短,以减少干扰噪声。为了保证射频信号的传输质量,封装后芯片的射频输出引脚应尽可能靠近芯片的四角。
如图7所示,通过之前扫描所得假体垫片的尺寸,简化假体垫片模型,认为是球面的一部分。在假体垫片上均匀分布20个传感器阵列点,当医生摆动患者股骨假体时,假体垫片受到压力,从而产生形变。由于假体垫片外壳上表面在不同位置的形变程度不同,从而内部不同位置的压力传感器阵列点也会受到不同的力。形变程度最大的点,也就是压力最大点将被视为接触点。
如图8所示,第一次最小二乘拟合,可得压力与坐标的关系,从而得到压力分布。求解过程即使得
如图9所示,然后使用最大压力点作为接触点,将接触点拟合成轨迹。为了获得准确以及使用价值较高的轨迹,本发明使用改进的最小二乘拟合。最小二乘拟合算法步骤如下:首先将假体垫片上表面模型简化为球面的一部分,在获得到压力分布数据后,将压力当作坐标的函数,进行如下式的拟合:
F=ax
F代表压力值,x,y,z代表球面三维坐标,多项式的系数a,b,c,d,e,m 通过扫描得到压力传感器阵列点数值求得,在x,y,z坐标范围内拟合该多项式可得到压力分布,压力最大值通过求极值的方法求得。
使用最大压力点作为接触点,将接触点拟合成轨迹,在求解函数极值时,由于未知量较多,系数矩阵有很大概率是病态矩阵,即很小的扰动将会给求解结果带来很大的干扰,降低求解结果的实用性。影响系数矩阵病态程度的因素有采样点与原点的距离以及采样点之间坐标的数量级差异。所以应用坐标平移与压缩变换来减少系数矩阵的病态程度。
其中
其中
通过此算法可以求得实时最大压力点与实时轨迹图。基本满足了单髁关节置换手术的要求。
根据前述可知,本发明的整体算法分为压力最大点定位算法与轨迹拟合算法两部分,两部分的核心算法均为最小二乘拟合算法,在最小二乘拟合算法中,核心是Ax=y。此为线性求解问题,其中A是维度为N×N的系数矩阵,x是待求解向量,y是已知常数向量。本发明将最小二乘拟合算法硬件化的目的是将压力分布数据转化为力线轨迹数据,从而提高力线轨迹拟合计算速度,减少无线发送数据,降低功耗。本发明利用LU矩阵分解法将系数矩阵A分解,充分利用硬件电路可以并行计算的特点,提高计算速度。LU矩阵分解法整体分为两步:系数矩阵A分解过程与求解向量x过程,其中大部分计算时间都花费在系数矩阵A分解过程上。系数矩阵A分解过程是首先将系数矩阵A分为两个矩阵,其中一个是上三角矩阵U,矩阵U中对角线以下的所有元素等于0。另一个是下三角矩阵L,矩阵L中对角线以上的所有元素都等于0。从而可以将上式转化为:
LUx=y
继续转化为:
Lk=y
最终转化为求解:
Ux=k
k为中间求解结果矩阵。
在此基础上,本发明算法硬件实现电路包括LU矩阵分解模块与求解模块两个部分,每个部分中均包含64个并行工作的处理单元,LU矩阵分解模块用来进行系数矩阵分解计算(即,将系数矩阵A分为上三角矩阵U和下三角矩阵L)。求解模块用于最终结果计算(即,Lk=y Ux=k)。
如图10所示,LU矩阵分解模块主要包括以下部分:
两个动态随机存取存储器DRAM,用FPGA开发板上的DDR2实现,以乒乓方式工作,即其中一个DRAM中的输出数据将成为另一DRAM的输入数据,这样可以显著提高数据吞吐量。
数据获取控制模块,控制DRAM与计算阵列之间的数据传输,包括状态机,状态机控制循环结构遍历迭代空间中所有的子矩阵。由于片外存储器的时钟频率与FPGA的时钟频率不同,因此在数据获取控制器中有3个不同功能的异步FIFO存储器FIFO_W、FIFO_R和FIFO_M,这三个FIFO分别用于缓存写入计算阵列的数据、缓存读出计算阵列的数据、暂存中间计算结果数据。
两个存储器控制模块,分别控制片外两个执行乒乓操作的DRAM,且处理不同位宽数据流。
计算阵列模块,包括所述64个并行工作的处理单元以及三个分别用于缓存用来存储的数据、用来计算的数据和用来传输的数据的buffer,三个buffer 并行工作,在存储与传输中间计算结果的同时还可以计算数据,提高了矩阵分解速率,64个处理单元中,由于除法器比加法器和乘法器更复杂,占据更多硬件资源,运算速度更慢,因此仅处理单元PE_0使用一个除法器,其余处理单元利用PE_0的计算结果进行倒数运算;由于处理单元PE_0的输入数据是16位浮点数,因此为了使所有处理单元并行工作,片外存储器即两个 DRAM的数据宽度为16×64位。
LU控制模块用来控制计算阵列模块的整体工作流程,包括内部三个缓存器的数据交互以及64个处理单元的计算过程。
如图11所示,来自LU矩阵分解模块的数据作为求解模块的输入数据,求解模块中处理单元的数量必须与LU矩阵分解模块中处理单元的数量相同。且求解模块中的每个处理单元的输入数据与LU矩阵分解模块中每一个处理单元的输出数据一一对应计算,将计算出的力线轨迹数据基于SPI接口发送到射频发射芯片。
如图12所示,构建了单髁膝关节置换手术的力线轨迹测量系统实验平台,由数据采集处理与发送模块,数据接收模块和用于数据显示的PC端组成。在实验中,固定胫骨假体并改变股骨假体相对于胫骨假体的角度,使股骨假体远端在假体垫片外壳上产生力线轨迹,压力传感器阵列放置在假体垫片外壳内部。由于在假体垫片外壳不同位置施加的压力不同,假体垫片外壳上的不同接触点产生的形变也不同,因此不同位置的传感器阵列点承受的压力也不同。数据采集处理与发送部分的装置尺寸为70mm×35mm×4mm,硬件电路实现力线轨迹拟合算法,进一步提高了系统拟合力线轨迹的速度,通过射频发射机打包发送数据量更小的力线轨迹数据而不是压力分布数据从而减小系统功耗。数据接收部分主要是基于已有的射频发射芯片搭建的数据记录仪,主要用于接收无线压力数据。数据记录仪中的400MHz杆状天线用作接收天线,接受并处理数据后通过USB接口将力线轨迹数据传送到个人计算机端存储,并实时显示压力最大点与力线轨迹。
本发明系统包括空闲模式与发射模式,只有在需要无线发射力线轨迹数据时,才会启动射频发射机,降低功耗。
本发明实际产品外形与结构参考图13,包括压力测试头11、颈部12、握持手柄14,在握持手柄14上有显示屏13,本发明传感器阵列设置在压力测试头11,数据处理和无线通信部分设置在握持手柄14,进行信号转换、降噪等处理,同时对电源进行管理,保证供电稳定。数据处理完后,在显示屏 13显示一些简单信息,同时对数据进行打包,通过无线通信的方式,发送到体外的接收器上,并在运行软件的电脑上显示。压力测试头11的形状同病人置换的假体的形状完全一致。同时,压力测试头11底部可以增加增高薄片,用于适用不同的股骨和胫骨平台间隙。增加厚度后,同样有相应型号、尺寸完全相同的植入假体相匹配。
- 一种无线便携式单髁膝关节置换术中力线轨迹测量系统
- 单髁膝关节置换术中股骨远端相对于假体垫片力线轨迹的测量方法与系统