一种提高疏浚绳索抓斗挖泥船挖深精度的控制系统及方法
文献发布时间:2023-06-19 10:41:48
技术领域
本发明涉及挖泥船的挖泥控制技术领域,尤其涉及一种提高疏浚绳索抓斗挖泥船挖深精度的控制系统及方法。
背景技术
随着我国水工建设的高速发展,迫切需要具备自动化更完善的定深平挖疏浚绳索抓斗挖泥船,来满足沿海港口深水航道建设与海洋工程的桩基、墩台、码头、海底隧道基础等工程需求,借以实现对基础挖掘的高精度控制,有效提高施工质量和作业效率,节约成本。
挖泥船海上施工作业时,船舶浮态会随着潮位涨落发生起伏改变,导致挖泥过程中设定的挖掘深度变化,对潮差较大及混合潮型海域挖泥作业影响最大。
目前,国内疏浚绳索抓斗挖泥船大都从日本等国进口,挖深精度控制在±50cm范围,均采用手动补偿潮位的人工调节方式控制挖掘精度,效率降低率为1.67%-5%。
发明内容
为了解决上述技术问题,本发明提供了一种提高疏浚绳索抓斗挖泥船挖深精度的精挖控制系统及方法,通过潮位自动补偿定深平挖工况实现精挖功能。
本发明为实在上述目的所采取的技术方案为:一种提高疏浚绳索抓斗挖泥船挖深精度的控制方法,其特征在于:通过潮位自动补偿定深平挖工况实现精挖功能,所述精挖是通过采集潮位遥报仪的潮位数值信息,自动获取潮位数值进入挖掘机深度补正装置,补偿潮汐变化对挖掘深度的影响,实时保持挖掘机作业在设定的挖深标高,实现精挖功能,具体包括以下步骤:
通过岸基潮位仪的水位压力传感器探头测得水位值传入潮位仪主机,与潮高基准面高程进行运算后输出潮位值,数据通过主机端口上的发射机以无线电波方式向外发送至设置在挖泥船上的遥报接收机;所述遥报接收机远程接收数据信息,解析后传输至挖掘控制系统的深度补正装置集成控制系统,所述集成控制系统利用外挂的中心处理器,构成数据传输链路;所述中心处理器存储和转换接收到的潮位差数据,通过实时与计数器已设定的挖深数值的运算,将潮位值补偿后的抓斗下放钢丝绳深度值发送至PLC控制器,PLC控制器指令定深平挖功能模块作业,提高挖深精度实现精挖。
所述潮位仪主机与发射机通过DB9接口相连,所述遥报接收机与中心处理器通过匹配RS232端口相连。
所述深度补正装置包括中心处理器、PLC控制器和定深平挖功能模块,所述中心处理器用于接收潮位仪的潮位数值并运算,其通信设计参数为非同期方式;传输方式设计为非二重通信。
所述挖深标高采用在挖掘机司操室的操作平台上,设置可输入数值的可逆计数器,取代机械式手动计数器。
所述深度补正装置是增设中心处理器的集成控制系统,所述中心处理器采用外挂的单片机控制系统,所述单片机控制系统包括存储器、运算器、转换器、数字输入接口、数字输出接口和电源模块;所述电源模块为整个单片机控制系统供电;所述存储器通过数字输入接口接收所述遥报接收机的传输数据并储存 ;所述运算器将所接收到的传输数据与计数器设定的挖深数值进行逻辑计算;所述转换器是将运算数据进行格式转换;所述数字输出接口用于输出转换后的单片机控制系统的数据给PLC控制器。
根据所述的一种提高疏浚绳索抓斗挖泥船挖深精度的控制方法所采用的控制系统,其特征在于:包括潮位仪、遥报接收机、深度补正装置;所述潮位仪包括用于水位值采集的水位压力传感器探头、用于接收探头数值的潮位仪主机及发射机;所述深度补正装置包括依次连接的中心处理器、PLC控制器和定深平挖功能模块。
所述深度补正装置是增设中心处理器的集成控制系统,所述中心处理器用于接收潮位仪的潮位数值并运算,其通信设计参数为非同期方式;传输方式设计为非二重通信。
所述中心处理器采用外挂的单片机控制系统,所述单片机控制系统包括存储器、运算器、转换器、数字输入接口、数字输出接口和电源模块;所述电源模块为整个单片机控制系统供电;所述存储器通过数字输入接口接收所述遥报接收机的传输数据并储存 ;所述运算器将所接收到的传输数据与计数器设定的挖深数值进行逻辑计算;所述转换器是将运算数据进行格式转换;所述数字输出接口用于输出转换后的单片机控制系统的数据给PLC控制器。
所述潮位仪主机与发射机通过DB9接口相连,所述遥报接收机与中心处理器通过匹配RS232端口相连。
本发明提供的一种提高疏浚绳索抓斗挖泥船精挖控制方法,采用自动获取遥报仪的潮位信息进入挖掘机深度补正装置集成控制系统,通过集成控制系统中心处理器处理,自动补偿潮汐变化数值对挖掘深度的影响,实时保持抓斗作业在设定的挖深标高,有效提高挖深精度,实现对挖泥船的精挖控制。将该类型挖泥船的挖掘精度由±50cm提高至±20cm,潮位自动补偿功能减少了因人手动输入数据时间损耗和行为误差,大大提高了生产效率和工程质量,填补国内外空白。
附图说明
图1为本发明的控制系统结构示意图;
图2为本发明单片机控制系统连接示意图;
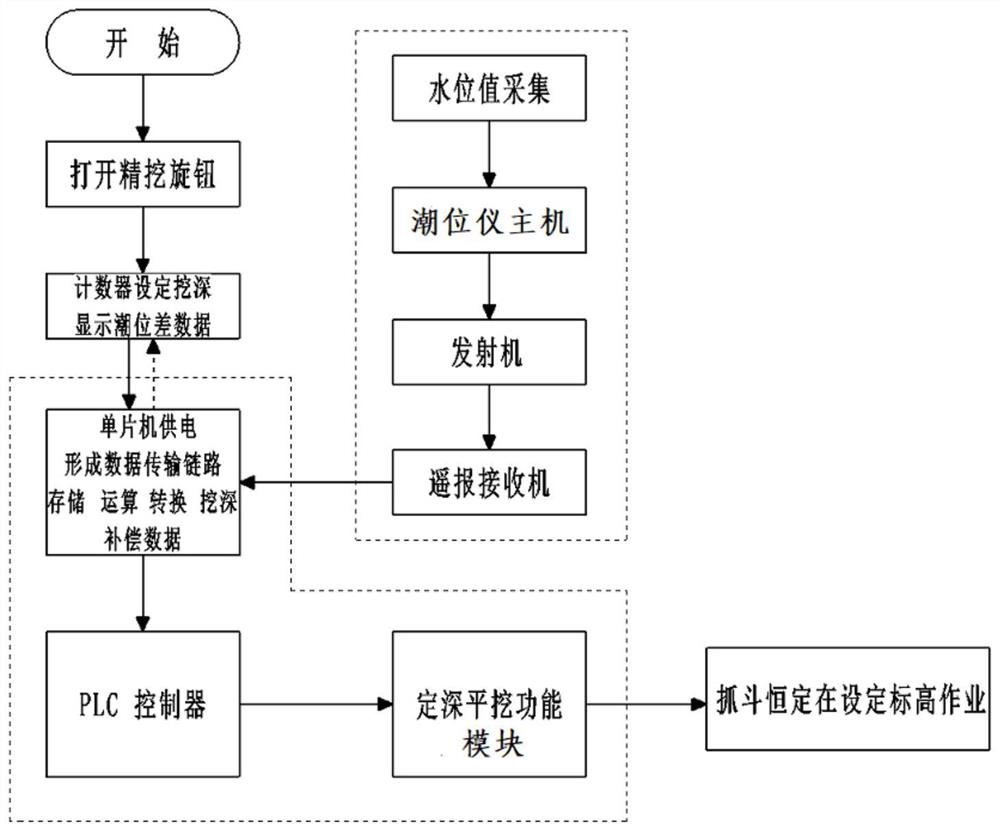
图3为本发明控制方法流程图。
具体实施方式
下面结合附图和实施例对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
实施例1
如图3所示,一种提高疏浚绳索抓斗挖泥船挖深精度的控制方法,通过潮位自动补偿定深平挖工况实现精挖功能,所述精挖是通过采集潮位遥报仪的潮位数值信息,自动获取潮位数值进入挖掘机深度补正装置,补偿潮汐变化对挖掘深度的影响,实时保持挖掘机作业在设定的挖深标高,实现精挖功能,具体包括以下步骤:
通过岸基潮位仪的水位压力传感器探头测得水位值传入潮位仪主机,与潮高基准面高程进行运算后输出潮位值,数据通过主机端口上的发射机以无线电波方式向外发送至设置在挖泥船上的遥报接收机;所述遥报接收机远程接收数据信息,解析后传输至挖掘控制系统的深度补正装置集成控制系统,所述集成控制系统利用外挂的中心处理器,构成数据传输链路;所述中心处理器存储和转换接收到的潮位差数据,通过实时与计数器已设定的挖深数值的运算,将潮位值补偿后的抓斗下放钢丝绳深度值发送至PLC控制器,PLC控制器指令定深平挖功能模块作业,提高挖深精度实现精挖。
本实施例通过打开遥报接收机电源,在挖掘机司操室操作台上安装的可逆计数器中,输入挖深标高数值;将操作台上设置的转换按钮旋转至“精挖”,外挂的中心处理器送电并接入挖掘机深度补正集成控制系统,进入精挖工况。中心处理器自动接收遥报接收机的潮位差数值与设定挖泥深度标高值进行运算,将运算后数据传送给PLC控制器单元,指令定深平挖功能作业。
具体地,可逆计数器中实时显示已接收的潮位差数值及运算后的挖泥深度数值,单位为cm。
具体地,中心处理控制器采用单片机控制系统,该单片机控制系统包括存储器、运算器、转换器、数字输入接口、数字输出接口和电源模块;电源模块为整个单片机控制系统供电,电压24v;存储器通过数字输入接口接收潮位仪接收机的传输数据储存,数据存储500兆自动删除最早数据;运算器将所接收到的传输数据与计数器设定的挖深数值进行逻辑计算;所述转换器是将运算数据进行格式转换,2位文字位16进制,1位文字位为ASCII ;所述数字输出接口用于输出单片机控制系统的数据传输给PLC控制器。
上述技术方案所提供的疏浚绳索抓斗挖泥船精挖控制方法,在不改变现有的挖泥船的控制原理的基础上,通过外挂单片机控制系统,自动接收潮位差数据和计数器中设定的挖深标高值进行运算,潮位值补偿后数据传输给挖掘机的PLC控制器,实现精挖控制。
实施例2
实施例1所述控制方法所采用的控制系统,如图1所示,包括潮位仪、遥报接收机、深度补正装置;所述潮位仪包括用于水位值采集的水位压力传感器探头、用于接收探头数值的潮位仪主机及发射机;所述深度补正装置包括依次连接的中心处理器、PLC控制器和定深平挖功能模块。
所述深度补正装置是增设中心处理器的集成控制系统,所述中心处理器用于接收潮位仪的潮位数值并运算,其通信设计参数为非同期方式;传输方式设计为非二重通信。
所述中心处理器采用外挂的单片机控制系统,如图2所示,所述单片机控制系统包括存储器、运算器、转换器、数字输入接口、数字输出接口和电源模块;所述电源模块为整个单片机控制系统供电;所述存储器通过数字输入接口接收所述遥报接收机的传输数据并储存 ;所述运算器将所接收到的传输数据与计数器设定的挖深数值进行逻辑计算;所述转换器是将运算数据进行格式转换;所述数字输出接口用于输出转换后的单片机控制系统的数据给PLC控制器。
所述潮位仪主机与发射机通过DB9接口相连,所述遥报接收机与中心处理器通过匹配RS232端口相连。
以上所述仅是本发明的优选实施方式,海工作业船舶均受潮汐影响,在不脱离本发明技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本发明的保护范围。
- 一种提高疏浚绳索抓斗挖泥船挖深精度的控制系统及方法
- 一种挖泥船的抓斗平挖控制方法及其系统