高负荷钢丝传动机器人整机
文献发布时间:2023-06-19 10:49:34
技术领域
本发明涉及一种高负荷钢丝传动机器人整机。
背景技术
钢丝牵引装置是一种利用钢丝与牵引轮之间的摩擦力传递牵引力的柔性牵引系统,广泛应用于物料输送,重物吊装等各领域。受限于钢丝与钢制牵引轮之间摩擦系数较小的限制,目前的钢丝牵引轮一般采用多槽式结构,通过钢丝的多圈卷绕增大接触面积,从而提高负载能力,但这种方式空间占用较大,无法满足紧凑空间的应用场景。而单排槽的钢丝牵引轮,由于钢丝与钢丝轮之间的接触面积以及张紧力限制,负载能力往往很低,无法适应大负载工况。
发明内容
本发明的目的在于克服以上所述的缺点,提供一种高负荷钢丝传动机器人整机。
为实现上述目的,本发明的具体方案如下:
一种高负荷钢丝传动机器人整机,包括高负荷牵引装置、从动牵引轮、牵引钢丝、多个间隔套接在牵引钢丝上的牵引板块、导向杆和多个依次滑动连接在导向杆上的滑动载具;所述牵引钢丝绕接在所述高负荷牵引装置和从动牵引轮上;所述滑动载具上设有供所述牵引钢丝穿过的U形缺口。
本发明进一步地,所述高负荷牵引装置包括底座、凸轮、钢丝牵引轮和多个压紧机构;
所述凸轮固定在所述底座的一侧,所述凸轮周壁依次设有压紧段、第一开闭段、打开段和第二开闭段;所述钢丝牵引轮具有多个沿周向间隔设置且沿径向延伸的轮辐,所述钢丝牵引轮活动穿过所述凸轮后通过轴承与所述底座转动连接;所述多个所述压紧机构一一对应滑动连接在多个所述轮辐上,每个所述压紧机构均包括滚轮、压紧杆、复位弹簧和锁止臂;所述滚轮轴接在所述压紧杆的一端;所述复位弹簧套设在所述压紧杆的外壁上,所述复位弹簧的两端分别与所述压紧杆和所述轮辐抵接;所述压紧杆的另一端设置有安装凹槽;所述锁止臂的一端活动铰接在所述安装凹槽上,所述锁止臂中部铰接在所述轮辐上。
本发明进一步地,所述压紧杆包括第一压杆和第二压杆;所述第一压杆的一端与所述滚轮轴接;所述第二压杆的一端设置有容置腔室;所述复位弹簧套设在第二压杆上;所述安装凹槽设置在所述第二压杆的另一端;所述第一压杆与所述第二压杆之间设置有压力调节机构;所述压力调节机构包括长度调节杆、压力调节杆、调节滑块和调节弹簧;所述长度调节杆的两端分别具有旋向相互相反的螺纹部,所述长度调节杆的一端螺纹连接在所述第一压紧杆的另一端,所述长度调节杆的另一端活动伸入所述容置腔室内;所述压力调节杆螺纹连接在所述长度调节杆的另一端,且所述压力调节杆的一部分活动伸入所述容置腔室内;所述调节滑块、所述调节弹簧均设于所述容置腔室内;所述调节滑块活动套设于所述长度调节杆上;所述调节弹簧的两端分别与所述容置腔室的内壁和所述调节滑块抵接;其中,所述调节滑块的一端面在所述调节弹簧的作用下始终保持与所述压力调节杆的端面接触。
本发明进一步地,所述第二压杆一端对称设置有与容置腔室连通的限位孔;所述滑块对称凸设有两个滑销,两个所述滑销一一对应活动嵌入两个所述限位孔内;所述长度调节杆的另一端端部凸设有限位挡环。
本发明进一步地,每个所述轮辐上均设置有第一凸耳、第二凸耳和第三凸耳,所述第一压杆穿过所述第一凸耳与所述轮辐滑动连接,所述第二压杆穿过第二凸耳与所述轮辐滑动连接,所述复位弹簧的两端分别与所述第二压杆和所述第二凸耳相抵接,所述锁止臂的中部铰接在所述第三凸耳上。
本发明进一步地,所述轮辐周壁设置有滑槽,所述滑槽形状与牵引钢丝周面相适配;所述锁止臂设置有与牵引钢丝周面相适配的圆弧凹槽。
本发明的有益效果:本发明通过设置钢丝牵引轮带动压紧机构同步转动,并利用压紧机构与凸轮有序配合,从而实现在钢丝与钢丝牵引轮接触时保持对钢丝持续压紧,从而大大提高负载能力,以适应大负载工况,且空间占用小,满足紧凑空间的应用场景。
本发明能够通过牵引钢丝实现更大负载工况的物料传送,机械化操作,效果高。
附图说明
图1是本发明的立体图;
图2是本发明另一视角的立体图;
图3是本发明的高负荷牵引装置的分解示意图;
图4是本发明的高负荷牵引装置的一剖视图;
图5是图4中A处的局部放大示意图;
图6是本发明中压紧机构的立体图;
图7是本发明中钢丝牵引轮的立体图;
附图标记说明:a1、高负荷牵引装置;a2、从动牵引轮;a3、牵引钢丝;a4、牵引板块;a5、导向杆;a6、滑动载具;a61、U形缺口;1-底座;2-凸轮;21-压紧段;22-第一开闭段;23-打开段;24-第二开闭段;3-钢丝牵引轮;31-轮辐;32第一凸耳;33-第二凸耳;34-第三凸耳;35-滑槽;4-压紧机构;41-滚轮;42-压紧杆;421-第一压杆;422-第二压杆;4221-容置腔室;4222-限位孔;43-复位弹簧;44-锁止臂;45-安装凹槽;5-压力调节机构;51-长度调节杆;52-压力调节杆;53-调节滑块;531-滑销;54-调节弹簧;6-轴承。
具体实施方式
下面结合附图和具体实施例对本发明作进一步详细的说明,并不是把本发明的实施范围局限于此。
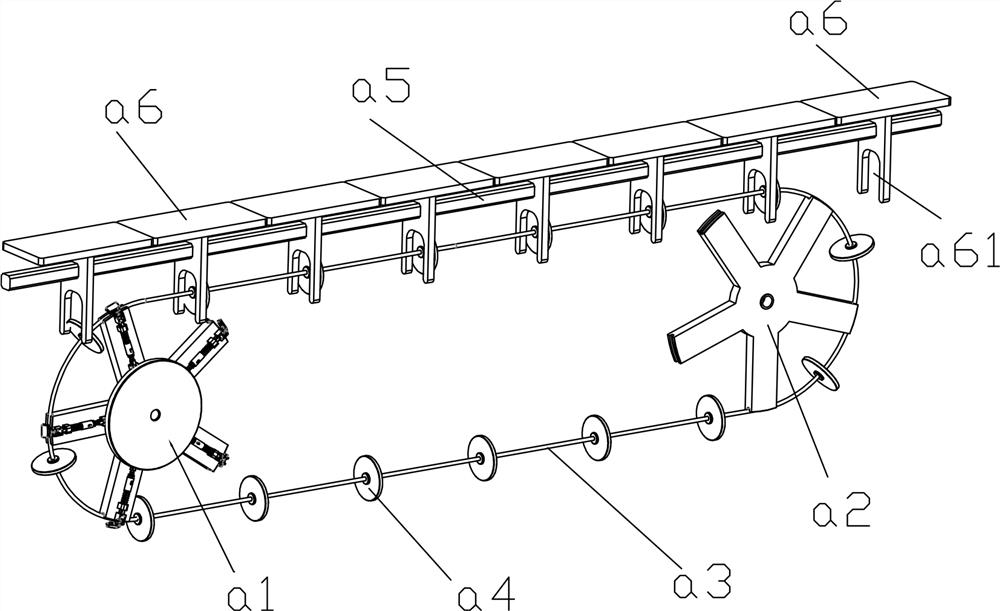
如图1至图7所示,本实施例所述的一种高负荷钢丝传动机器人整机,包括高负荷牵引装置a1、从动牵引轮a2、牵引钢丝a3、多个间隔套接在牵引钢丝a3上的牵引板块a4、导向杆a5和多个依次滑动连接在导向杆a5上的滑动载具a6;所述牵引钢丝a3绕接在所述高负荷牵引装置a1和从动牵引轮a2上;所述滑动载具a6上设有供所述牵引钢丝a3穿过的U形缺口a61。
实际使用时,滑动载具a6位于牵引钢丝a3的上方,位于上侧的牵引钢丝a3部分对应穿过各个滑动载具a6上的U形缺口a61,然后在外界动力驱动下,高负荷牵引装置a1旋转,并带动牵引钢丝a3、从动牵引轮a2旋转,各个牵引板块a4沿着牵引钢丝a3形成的轨迹循环运动,并一一对应推动多个滑动载具a6沿着导向杆a5移动,当牵引板块a4运动至牵引钢丝a3的圆弧段部分时,牵引板块a4逐渐与滑动载具a6脱离,同时该滑动载具a6在与牵引板块a4脱离后,被下一个滑动载具a6推动向前移动,如此随着牵引钢丝a3的不断旋转,不断推动各个滑动载具a6沿着导向杆a5移动,如此可实现更大负载工况的物料传送,机械化操作,效率高。
基于上述实施例的基础上,进一步地,所述高负荷牵引装置a1包括底座1、凸轮2、钢丝牵引轮3和多个压紧机构4;
所述凸轮2固定在所述底座1的一侧,所述凸轮2周壁依次设有压紧段21、第一开闭段22、打开段23和第二开闭段24;所述钢丝牵引轮3具有多个沿周向间隔设置且沿径向延伸的轮辐31,所述钢丝牵引轮3活动穿过所述凸轮2后通过轴承6与所述底座1转动连接;所述多个所述压紧机构4一一对应滑动连接在多个所述轮辐31上,每个所述压紧机构4均包括滚轮41、压紧杆42、复位弹簧43和锁止臂44;所述滚轮41轴接在所述压紧杆42的一端;所述复位弹簧43套设在所述压紧杆42的外壁上,所述复位弹簧43的两端分别与所述压紧杆42和所述轮辐31抵接;所述压紧杆42的另一端设置有安装凹槽45;所述锁止臂44的一端活动铰接在所述安装凹槽45上,所述锁止臂44中部铰接在所述轮辐31上。
本实施例的工作方式:工作时,钢丝牵引轮3在外界动力的驱动下转动,带动多个压紧机构4同步转动,各个滚轮41沿着凸轮2的周面滚动,当滚轮41运动到压紧段21时,压紧机构4处于压紧状态,凸轮2对滚轮41有轴向向外的挤压力,滚轮41推动压紧杆42相对轮辐31向外滑出,压紧杆2传递挤压力后使得锁止臂44将钢丝压紧在轮辐31上,此时复位弹簧43处于被压缩状态;当滚轮41运动到第一开闭段22时,压紧机构4在复位弹簧43的作用下,相对轮辐31逐渐向内滑动,锁止臂44在压紧杆42的拉动下逐渐从压紧状态向打开状态变化,即锁止臂44逐渐松开钢丝;当滚轮41运动打开段23时,复位弹簧43处于自然状态,此时锁止臂44始终保持打开状态;当滚轮41运动至第二开闭段24时,压紧杆42相对轮辐31逐渐向外伸出并推动锁止臂44摆动,使得锁止臂44从打开状态向压紧状态变化,直至锁止臂44压紧钢丝,然后滚轮41进入压紧段,使得锁止臂44保持压紧钢丝。
本实施例通过设置钢丝牵引轮3带动压紧机构4同步转动,并利用压紧机构4与凸轮2有序配合,从而实现在钢丝与钢丝牵引轮3接触时保持对钢丝持续压紧,从而大大提高负载能力,以适应大负载工况,且空间占用小,满足紧凑空间的应用场景。
基于上述实施例的基础,进一步地,所述压紧杆42包括第一压杆421和第二压杆422;所述第一压杆421的一端与所述滚轮41轴接;所述第二压杆422的一端设置有容置腔室4221;所述复位弹簧43套设在第二压杆422上;所述安装凹槽45设置在所述第二压杆422的另一端;所述第一压杆421与所述第二压杆422之间设置有压力调节机构5;所述压力调节机构5包括长度调节杆51、压力调节杆52、调节滑块53和调节弹簧54;所述长度调节杆51的两端分别具有旋向相互相反的螺纹部,所述长度调节杆51的一端螺纹连接在所述第一压紧杆42的另一端,所述长度调节杆51的另一端活动伸入所述容置腔室4221内;所述压力调节杆52螺纹连接在所述长度调节杆51的另一端,且所述压力调节杆52的一部分活动伸入所述容置腔室4221内;所述调节滑块53、所述调节弹簧54均设于所述容置腔室4221内;所述调节滑块53活动套设于所述长度调节杆51上;所述调节弹簧54的两端分别与所述容置腔室4221的内壁和所述调节滑块53抵接;其中,所述调节滑块53的一端面在所述调节弹簧54的作用下始终保持与所述压力调节杆52的端面接触。
实际使用时,手动旋动所述长度调节杆51使长度调节杆51相对于第一压杆421向外旋出,长度调节杆51带动压力调节杆52旋动,压力调节杆52向容置腔室4221内推压调节滑块53,进一步推压调节弹簧54,调节弹簧54处于压缩状态,轴向对第二压杆422有轴向向外的推力进而使第二压杆422对锁止臂44的推力达到工作所需的大小;如此通过长度调节杆52、压力调节杆53、调节滑块54和调节弹簧55相互配合、联动,实现整个压紧杆42对锁止臂44的推力可调,进而使得锁止臂44对钢丝的压紧力可调,结构更灵活,以适应不同工况所需的负载大小。
基于上述实施例的基础,进一步地,所述第二压杆422一端对称设置有与容置腔室4221连通的限位孔4222;所述滑块对称凸设有两个滑销531,两个所述滑销531一一对应活动嵌入两个所述限位孔4222内。本实施例通过两个所述滑销531在两个所述限位孔4222内滑动,控制调节滑块54对调节弹簧55的压缩范围。本实施例中,进一步地,所述长度调节杆51的另一端端部凸设有限位挡环。如此设置,有效防止调节滑块53滑出长度调节杆51。
基于上述实施例的基础,进一步地,每个所述轮辐31上均设置有第一凸耳32、第二凸耳33和第三凸耳34,所述第一压杆421穿过所述第一凸耳32与所述轮辐31滑动连接,所述第二压杆422穿过第二凸耳33与所述轮辐31滑动连接,所述复位弹簧43的两端分别与所述第二压杆422和所述第二凸耳33相抵接,所述锁止臂44的中部铰接在所述第三凸耳34上。本实施例将第一凸耳32、所述第二凸耳33和所述第三凸耳34设置在同一条直线上,确保所述第一压杆421、所述第二压杆422和所述锁止臂44安装在同一条轴向直线上,保证了所述第一压杆421、所述第二压杆422和所述锁止臂44的轴向运动。
基于上述实施例的基础,进一步地,所述轮辐31周壁设置有滑槽35,所述滑槽35形状与所述牵引钢丝a3周面相适配。如此设置,使得轮辐31与钢丝充分接触,进而提高负载能力。本实施例中,进一步地,所述锁止臂44设置有与所述牵引钢丝a3周面相适配的第二圆弧凹槽。如此设置,使得锁止臂44上与钢丝接触充分,利于锁止臂44牢固压紧,进而增大负载能力。
以上所述仅是本发明的一个较佳实施例,故凡依本发明专利申请范围所述的构造、特征及原理所做的等效变化或修饰,包含在本发明专利申请的保护范围内。
- 高负荷钢丝传动机器人整机
- 高负荷传动皮带用橡胶组合物及使用该橡胶组合物的高负荷传动皮带