一种多功能康复机器人
文献发布时间:2023-06-19 10:51:07
技术领域
本发明涉及一种机器人,特别是一种多功能康复机器人。
背景技术
有些人由于疾病或者意外导致自身腿部受伤后,便无法行走,需要长时间的休养,腿部在长时间缺少运动的情况下,腿部正常行动能力则会丧失,需要通过长时间的复健来完成腿部的康复,传统复健都是通过双手支撑于医用双杠助行器上,然后慢慢挪动双腿,使双腿慢慢适应在地上行走的状态,此刻身体的重量主要由双手来承担,因此双手极易出现力竭的情况,当身旁无人看护时,一旦复健人员双手力竭,便极易出现摔倒的情况,严重时,甚至可能会再次造成复健人员腿部的伤害,存在严重的安全隐患,且由于双手的力量有限,因此复健人员每天复健时间受限于双手的力量,无法进行长时间复健,影响复健人员的康复速度。
为了解决上述问题,则会采用康复机器人,无需利用双手来支撑起身体,康复机器人便能够在支撑复健人员的身体的同时主动带动复健人员的双腿行走,而复健人员在复健结束后,依旧需要做到轮椅上进行移动,因此复健人员需要同时携带康复机器人与轮椅,极占据空间,不便于运输,且会增加复健人员的复健费用。
发明内容
本发明要解决现有的技术问题是提供一种多功能康复机器人,它不仅能够主动带动复健人员双腿进行行走,且能够变形成轮椅状态,减少复健费用。
本发明解决上述技术问题采用的技术方案为:
本发明公开一种多功能康复机器人,包括背靠板,其特征在于:所述背靠板后侧侧壁设有一背包,背靠板前侧侧壁左右两侧设有互为对称的背带;所述背包内盛放有电路控制器以及与电路控制器相连接的电源;所述背靠板下侧设有一与电路控制器相匹配的控制面板;所述控制面板上部左右两侧通过第一伸缩装置连接有腰部固定板;所述腰部固定板前端通过第二伸缩装置连接有一固定座,左右两侧的固定座之间通过卡扣调节腰带相连接;所述固定座外侧设有第一旋转装置;所述第一旋转装置连接有第一腿部带动装置;所述第一腿部带动装置下端通过第二旋转装置与第二腿部带动装置相连接;所述第二腿部调节装置下端通过第三旋转装置与脚部固定装置;所述第一腿部带动装置设有一与其相匹配的轮椅后支撑脚;所述轮椅后支撑脚下端与第二腿部带动装置下端左侧皆设有一后滚轮;所述第一腿部带动装置以及第二腿部带动装置上皆设有若干呈纵向均匀分布的束缚结构。
所述第一伸缩装置包括设于控制面板上部内的第一伸缩孔,第一伸缩孔左右两端孔口分别位于控制面板上部左右两侧侧壁上;所述控制面板后侧侧壁左右两边设有与第一伸缩孔相贯通的第一通孔;所述第一伸缩孔前侧内壁设有与第一通孔同轴的第一螺孔;所述腰部固定板由横向板与纵向板组成,横向板与纵向板互为垂直,横向板穿入至第一伸缩孔内;所述横向板上设有第一长腰孔;所述第一螺孔内螺接有第一螺杆,第一螺杆后端向后依次穿过第一长腰孔、第一通孔并设有第一手轮。
所述第二伸缩装置包括纵向板上端面内侧边沿向内延伸而出的限位板;所述限位板上设有第二长腰孔;所述固定座后侧侧壁设有一与限位板相匹配的横向限位槽;所述固定座后侧侧壁设有一与纵向板相匹配的纵向限位槽,纵向限位槽与横向限位槽互为垂直;所述横向限位槽槽底设有第二螺孔;所述固定座上表面设有与第二螺孔同轴的第二通孔;所述第二螺孔螺接有第二螺杆;所述第二螺杆上端向上依次穿过第二长腰孔、第二通孔并设有第二手轮。
所述第一旋转装置包括设于固定座外侧的固定臂;所述固定臂上设有第一固定孔、位于第一固定孔正下方的第二固定孔;所述第一固定孔内设有与其相匹配的第一电机,第一电机的电机轴外端设有第一齿轮;所述第二固定孔内设有与其相匹配的第二电机,第二电机的电机轴内端设有第二齿轮;所述固定臂上设有第一轴孔,第一轴孔位于第一固定孔与第二固定孔之间;所述轮椅后支撑脚上端外壁设有第一卡槽;所述轮椅后支撑脚上端内壁设有与第一卡槽同轴的第一齿槽,第一齿槽内壁的齿与第一齿轮相啮合;所述第一齿槽通过第二轴孔与第一卡槽相贯通,第二轴孔直径小于第一卡槽直径;所述第一腿部带动装置包括第一腿部带动上臂,第一腿部带动上臂上端内壁设有与第一卡槽同轴的第二卡槽;所述第一腿部带动上臂上端外壁设有第二齿槽,第二齿槽内壁的齿与第二齿轮相啮合;所述第二齿槽通过第三轴孔与第二卡槽相贯通,第三轴孔直径小于第二卡槽直径;所述第一卡槽内设有与其相匹配的第一卡板;所述第二卡槽内设有与其相匹配的第二卡板;所述第一卡板与第二卡板之间通过第一铰接轴相连接,第一铰接轴依次穿过第二轴孔、第一齿槽、第一轴孔、第二齿槽、第三轴孔。
所述第一腿部带动装置包括第二腿部带动上臂,第二腿部带动上臂上设有第三长腰孔;所述第二腿部带动上臂上端面设有与第三长腰孔相贯通的第一活动孔,第一活动孔与第三长腰孔垂直交叉;所述第一腿部带动上臂下端面设有第一调节孔;所述第一调节孔孔底中心设有与第一调节孔相匹配的第一延长臂;所述第一延长臂前侧侧壁设有第三螺孔;所述第一腿部带动上臂前侧侧壁设有与第三螺孔同轴的第三通孔;所述第二腿部带动上臂穿入至第一调节孔内,第一延长臂穿入至第一活动孔内;所述第三螺孔内螺接有第三螺杆,第三螺杆前端向前依次穿过第三长腰孔、第三通孔并设有第三手轮。
所述第二旋转装置包括设于第二腿部带动上臂下端面的第一铰接槽;所述第二腿部带动装置包括第一腿部带动下臂,第一腿部带动下臂上端伸入至第一铰接槽内并设有第三固定孔、位于第三固定孔正下方的第四固定孔;所述第一铰接槽一侧内壁设有第三齿槽;所述第一腿部带动下臂外侧侧壁设有第三卡槽,第三卡槽通过第四轴孔与第一铰接槽相贯通,第三卡槽直径大于第四轴孔直径;所述第一腿部带动下臂内侧侧壁设有与第三齿槽相贯通的第五轴孔,第五轴孔与第四轴孔同轴;所述第三卡槽内设有与其相匹配的第三卡板;所述第一腿部带动下臂内侧侧壁设有与其相贴合的第四卡板;所述第三卡板与第四卡板之间通过第二铰接轴相连接;所述第一腿部带动下臂上端设有与第五轴孔同轴的第六轴孔;所述第二铰接轴依次穿过第四轴孔、第六轴孔、第三齿槽、第五轴孔;所述第三固定孔内设有与其相匹配的第三电机,第三电机的电机轴内端设有与第三齿槽内壁的齿相啮合的第三齿轮;所述第四固定孔内设有与其相匹配的第四电机,第四电机的电机轴内端设有与第三齿槽的齿相啮合的第四齿轮。
所述第二腿部带动装置包括第二腿部带动下臂,第二腿部带动下臂上端面设有第二调节孔;所述第二调节孔孔底中心设有第二延长臂;所述第二延长臂前侧侧壁设有第四螺孔;所述第二腿部带动下臂前侧侧壁设有与第四螺孔同轴的第四通孔;所述第一腿部带动下臂上设有第四长腰孔;所述第一腿部带动下臂上端面设有与第四长腰孔相贯通的第二活动孔,第二活动孔与第四长腰孔垂直交叉;所述第四螺孔螺接有第四螺杆,第四螺杆前端向前依次穿过第四长腰孔、第四通孔并设有第四手轮。
所述第三旋转装置包括设于第二腿部带动下臂下端面设有第二铰接槽;所述第二铰接槽一侧内壁设有第四齿槽;所述第二腿部带动下臂下端外壁设有第四卡槽,第四卡槽通过第七轴孔与第二铰接槽相贯通,第四卡槽直径小于第七轴孔直径;所述第二腿部带动下臂下端内壁设有第五卡槽,第五卡槽通过第八轴孔与第四齿槽相贯通,第五卡槽直径大于第八轴孔直径;所述第四卡槽内设有与其相匹配的第四嵌板;所述第五卡槽内设有与其相匹配的第五卡板;所述第四嵌板与第五卡板之间通过第三铰接轴相连接;所述脚步固定装置包括脚架,脚架上端向上伸入至第二铰接槽内并设有第九轴孔、位于第九轴孔正下方的第五固定孔;所述第三铰接轴依次穿过第七轴孔、第九轴孔、第四齿槽、第八轴孔;所述第五固定孔内设有与其相匹配的第五电机;所述第五电机的电机轴内端设有与第四齿槽内壁的齿相啮合的第五齿轮;所述脚架下端内壁设有一脚垫;所述脚垫上设有若干均匀分布的绑带。
所述第二腿部带动下臂下端外壁设有一铰接座;所述铰接座中部设有第三铰接槽;所述铰接座前侧侧壁设有与第三铰接槽相贯通的第五通孔;所述铰接座后侧侧壁设有与第三铰接槽相贯通的第五螺孔;所述第二腿部带动下臂下端外侧设有一前轮座;所述前轮座下端面设有与第三铰接槽相匹配的铰接头;所述铰接头上设有第十轴孔;所述第五螺孔内螺接有第五螺杆,第五螺杆前端向前依次穿过第十轴孔、第五通孔并设有与铰接座前侧侧壁相贴合的第五手轮,第五螺杆后端向后穿出第五螺孔并设有一与铰接座后侧侧壁相贴合的第六手轮;所述前轮座与第二腿部带动下臂相对的内侧侧壁、第二腿部带动上臂与后滚轮相对的外侧侧壁皆设有一旋转台;所述前轮座内侧设有前滚轮;所述前滚轮外侧侧壁、后滚轮内侧侧壁皆设有与旋转台相匹配的旋转槽;所述旋转台上设有第六固定孔、位于第六固定孔正下方的第七固定孔、第十一轴孔,第十一轴孔位于第六固定孔与第七固定孔之间;所述旋转槽槽底设有第五齿槽;所述第六固定孔内设有与其相匹配的第六电机,第六电机的电机轴端部设有与第五齿槽内壁的齿相啮合的第六齿轮;所述第七固定孔内设有与其相匹配的第七电机,第七电机的电机轴端部设有第五齿槽内壁的齿相啮合的第七齿轮;所述前滚轮内壁、后滚轮外壁皆设有第六卡槽,第六卡槽通过第十二轴孔与第五齿槽相贯通,第六卡槽直径大于第十二轴孔直径;所述轮椅后支撑脚下端内壁、前轮座内皆设有第七卡槽,第七卡槽通过第十三轴孔与第十一轴孔相贯通,第七卡槽直径大于第十三轴孔;所述第六卡槽内设有与其相匹配的第六卡板,第七卡槽内设有与其相匹配的第七卡板,第六卡板与第七卡板之间通过第四铰接轴相连接;所述第四铰接轴依次穿过第十二轴孔、第五齿槽、第十一轴孔、第十三轴孔。
所述束缚结构包括若干设于第一腿部带动下臂后侧侧壁右边和第二腿部带动下臂后侧侧壁右边的束缚臂、若干设于第一腿部带动下臂前侧侧壁和第二腿部带动下臂前侧侧壁上的束缚座,束缚座与束缚臂位置相对应;所述束缚座前侧侧壁、束缚臂前侧侧壁上皆设有一横向嵌槽;所述横向嵌槽一端槽口位于束缚座内壁上和位于束缚臂内端面上;所述束缚臂前侧侧壁上设有一纵向嵌槽,纵向嵌槽与设于束缚臂前侧侧壁上的横向嵌槽互为垂直并相贯通,横向嵌槽与纵向嵌槽之间呈T字型;所述纵向嵌槽与横向嵌槽相贯通的一侧侧壁、束缚座外壁皆设有一辅助嵌槽,辅助嵌槽宽度大于横向嵌槽宽度;所述辅助嵌槽内设有与其相匹配的T型卡件;所述T型卡件之间通过束缚带相连接。
本发明的有益效果是:
与现有技术相比,采用本发明结构的多功能康复机器人可通过束缚结构将复健人员的大腿与第一腿部带动装置固定、将复健人员的小腿与第二腿部带动装置固定,通过绑带将复健人员的脚固定于脚垫上,通过卡扣调节腰带对复健人员腰部进行固定,而背靠板能够在复健人员背部形成支撑,而康复人员双腿行走的动作完全由第一腿部带动装置与第二腿部带动装置带动,无需将双手支撑于双杠助行器来进行腿部复健,有效避免双手无力后便无法再进行腿部复健,有效延长复健时间,加快复健人员的康复速度,且能够有效避免双手突然无力导致复健人员摔倒受伤的情况,有效杜绝安全隐患,而康复机器人更能够在帮助复健人员完成复健后转变成轮椅状态,实现康复机器人的多功能,康复机器人能够转变成轮椅状态如同将康复机器人与轮椅二合一,有效减少了运输空间,同时能够有效减少复健费用。
附图说明
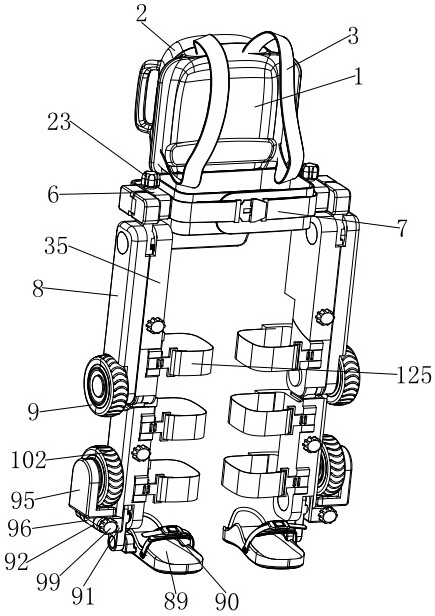
图1是本发明多功能康复机器人的一个角度的结构示意图;
图2是本发明多功能康复机器人的另一个角度的结构示意图;
图3是本发明多功能康复机器人变形呈轮椅状态时的一个角度的结构示意图;
图4是本发明多功能康复机器人变形呈轮椅状态时的另一个角度的结构示意图;
图5是本发明多功能康复机器人的剖面图;
图6是图5的A部的放大图;
图7是图5的B部的放大图;
图8是图5的C部的放大图;
图9是第一腿部带动装置与第二腿部带动装置装配时的一个角度的结构示意图;
图10是第一腿部带动装置与第二腿部带动装置装配时的另一个角度的结构示意图;
图11是第一伸缩装置与第二伸缩装置的结构示意图;
图12是固定座的结构示意图;
图13是束缚结构的结构示意图;
图14是束缚臂与束缚座的结构示意图。
具体实施方式
下面结合附图和具体实施方式对本发明作进一步详细的说明:
请参阅图1至图14,本发明提供一种多功能康复机器人,包括背靠板1,所述背靠板1后侧侧壁设有一背包2,背靠板1前侧侧壁左右两侧设有互为对称的背带3;所述背包2内盛放有电路控制器以及与电路控制器相连接的电源;所述背靠板1下侧设有一与电路控制器相匹配的控制面板4;所述控制面板4上部左右两侧通过第一伸缩装置连接有腰部固定板5;所述腰部固定板5前端通过第二伸缩装置连接有一固定座6,左右两侧的固定座6之间通过卡扣调节腰带7相连接;所述固定座6外侧设有第一旋转装置;所述第一旋转装置连接有第一腿部带动装置;所述第一腿部带动装置下端通过第二旋转装置与第二腿部带动装置相连接;所述第二腿部调节装置下端通过第三旋转装置与脚部固定装置;所述第一腿部带动装置设有一与其相匹配的轮椅后支撑脚8;所述轮椅后支撑脚8下端与第二腿部带动装置下端左侧皆设有一后滚轮9;所述第一腿部带动装置以及第二腿部带动装置上皆设有若干呈纵向均匀分布的束缚结构。
所述第一伸缩装置包括设于控制面板上部内的第一伸缩孔10,第一伸缩孔10左右两端孔口分别位于控制面板4上部左右两侧侧壁上;所述控制面板4后侧侧壁左右两边设有与第一伸缩孔10相贯通的第一通孔11;所述第一伸缩孔10前侧内壁设有与第一通孔11同轴的第一螺孔12;所述腰部固定板5由横向板501与纵向板502组成,横向板501与纵向板502互为垂直,横向板501穿入至第一伸缩孔10内;所述横向板501上设有第一长腰孔13;所述第一螺孔12内螺接有第一螺杆14,第一螺杆14后端向后依次穿过第一长腰孔13、第一通孔11并设有第一手轮15。
所述第二伸缩装置包括纵向板502上端面内侧边沿向内延伸而出的限位板16;所述限位板16上设有第二长腰孔17;所述固定座6后侧侧壁设有一与限位板16相匹配的横向限位槽18;所述固定座6后侧侧壁设有一与纵向板502相匹配的纵向限位槽19,纵向限位槽19与横向限位槽18互为垂直;所述横向限位槽18槽底设有第二螺孔20;所述固定座6上表面设有与第二螺孔20同轴的第二通孔21;所述第二螺孔20螺接有第二螺杆22;所述第二螺杆22上端向上依次穿过第二长腰孔17、第二通孔21并设有第二手轮23。
所述第一旋转装置包括设于固定座6外侧的固定臂24;所述固定臂24上设有第一固定孔25、位于第一固定孔25正下方的第二固定孔26;所述第一固定孔25内设有与其相匹配的第一电机27,第一电机27的电机轴外端设有第一齿轮28;所述第二固定孔26内设有与其相匹配的第二电机29,第二电机29的电机轴内端设有第二齿轮30;所述固定臂24上设有第一轴孔31,第一轴孔31位于第一固定孔25与第二固定孔26之间;所述轮椅后支撑脚8上端外壁设有第一卡槽32;所述轮椅后支撑脚8上端内壁设有与第一卡槽32同轴的第一齿槽33,第一齿槽33内壁的齿与第一齿轮28相啮合;所述第一齿槽33通过第二轴孔34与第一卡槽32相贯通,第二轴孔34直径小于第一卡槽32直径;所述第一腿部带动装置包括第一腿部带动上臂35,第一腿部带动上臂35上端内壁设有与第一卡槽32同轴的第二卡槽36;所述第一腿部带动上臂35上端外壁设有第二齿槽37,第二齿槽37内壁的齿与第二齿轮30相啮合;所述第二齿槽37通过第三轴孔38与第二卡槽36相贯通,第三轴孔38直径小于第二卡槽36直径;所述第一卡槽32内设有与其相匹配的第一卡板39;所述第二卡槽36内设有与其相匹配的第二卡板40;所述第一卡板39与第二卡板40之间通过第一铰接轴41相连接,第一铰接轴41依次穿过第二轴孔34、第一齿槽33、第一轴孔31、第二齿槽37、第三轴孔38。
所述第一腿部带动装置包括第二腿部带动上臂42,第二腿部带动上臂42上设有第三长腰孔43;所述第二腿部带动上臂42上端面设有与第三长腰孔43相贯通的第一活动孔44,第一活动孔44与第三长腰孔43垂直交叉;所述第一腿部带动上臂35下端面设有第一调节孔45;所述第一调节孔45孔底中心设有与第一调节孔45相匹配的第一延长臂46;所述第一延长臂46前侧侧壁设有第三螺孔47;所述第一腿部带动上臂35前侧侧壁设有与第三螺孔47同轴的第三通孔48;所述第二腿部带动上臂42穿入至第一调节孔45内,第一延长臂46穿入至第一活动孔44内;所述第三螺孔47内螺接有第三螺杆49,第三螺杆49前端向前依次穿过第三长腰孔43、第三通孔48并设有第三手轮50。
所述第二旋转装置包括设于第二腿部带动上臂42下端面的第一铰接槽51;所述第二腿部带动装置包括第一腿部带动下臂52,第一腿部带动下臂52上端伸入至第一铰接槽51内并设有第三固定孔53、位于第三固定孔53正下方的第四固定孔54;所述第一铰接槽51一侧内壁设有第三齿槽55;所述第一腿部带动下臂52外侧侧壁设有第三卡槽56,第三卡槽56通过第四轴孔57与第一铰接槽51相贯通,第三卡槽56直径大于第四轴孔57直径;所述第一腿部带动下臂52内侧侧壁设有与第三齿槽55相贯通的第五轴孔58,第五轴孔58与第四轴孔57同轴;所述第三卡槽56内设有与其相匹配的第三卡板59;所述第一腿部带动下臂52内侧侧壁设有与其相贴合的第四卡板60;所述第三卡板59与第四卡板60之间通过第二铰接轴61相连接;所述第一腿部带动下臂52上端设有与第五轴孔58同轴的第六轴孔62;所述第二铰接轴61依次穿过第四轴孔57、第六轴孔62、第三齿槽55、第五轴孔58;所述第三固定孔53内设有与其相匹配的第三电机63,第三电机63的电机轴内端设有与第三齿槽55内壁的齿相啮合的第三齿轮64;所述第四固定孔54内设有与其相匹配的第四电机65,第四电机65的电机轴内端设有与第三齿槽55的齿相啮合的第四齿轮66。
所述第二腿部带动装置包括第二腿部带动下臂67,第二腿部带动下臂67上端面设有第二调节孔68;所述第二调节孔68孔底中心设有第二延长臂69;所述第二延长臂69前侧侧壁设有第四螺孔70;所述第二腿部带动下臂67前侧侧壁设有与第四螺孔70同轴的第四通孔71;所述第一腿部带动下臂52上设有第四长腰孔72;所述第一腿部带动下臂52上端面设有与第四长腰孔72相贯通的第二活动孔73,第二活动孔73与第四长腰孔72垂直交叉;所述第四螺孔70螺接有第四螺杆74,第四螺杆74前端向前依次穿过第四长腰孔72、第四通孔71并设有第四手轮75。
所述第三旋转装置包括设于第二腿部带动下臂67下端面设有第二铰接槽76;所述第二铰接槽76一侧内壁设有第四齿槽77;所述第二腿部带动下臂67下端外壁设有第四卡槽78,第四卡槽78通过第七轴孔79与第二铰接槽76相贯通,第四卡槽78直径小于第七轴孔79直径;所述第二腿部带动下臂67下端内壁设有第五卡槽80,第五卡槽80通过第八轴孔81与第四齿槽77相贯通,第五卡槽80直径大于第八轴孔81直径;所述第四卡槽78内设有与其相匹配的第四嵌板7801;所述第五卡槽80内设有与其相匹配的第五卡板82;所述第四嵌板7801与第五卡板82之间通过第三铰接轴83相连接;所述脚步固定装置包括脚架84,脚架84上端向上伸入至第二铰接槽76内并设有第九轴孔85、位于第九轴孔85正下方的第五固定孔86;所述第三铰接轴83依次穿过第七轴孔79、第九轴孔85、第四齿槽77、第八轴孔81;所述第五固定孔86内设有与其相匹配的第五电机87;所述第五电机87的电机轴内端设有与第四齿槽77内壁的齿相啮合的第五齿轮88;所述脚架84下端内壁设有一脚垫89;所述脚垫89上设有若干均匀分布的绑带90。
所述第二腿部带动下臂67下端外壁设有一铰接座91;所述铰接座91中部设有第三铰接槽92;所述铰接座91前侧侧壁设有与第三铰接槽92相贯通的第五通孔93;所述铰接座91后侧侧壁设有与第三铰接槽92相贯通的第五螺孔94;所述第二腿部带动下臂67下端外侧设有一前轮座95;所述前轮座95下端面设有与第三铰接槽92相匹配的铰接头96;所述铰接头96上设有第十轴孔97;所述第五螺孔94内螺接有第五螺杆98,第五螺杆98前端向前依次穿过第十轴孔97、第五通孔93并设有与铰接座91前侧侧壁相贴合的第五手轮99,第五螺杆98后端向后穿出第五螺孔94并设有一与铰接座91后侧侧壁相贴合的第六手轮100;所述前轮座95与第二腿部带动下臂67相对的内侧侧壁、第二腿部带动上臂42与后滚轮9相对的外侧侧壁皆设有一旋转台101;所述前轮座95内侧设有前滚轮102;所述前滚轮102外侧侧壁、后滚轮9内侧侧壁皆设有与旋转台101相匹配的旋转槽103;所述旋转台101上设有第六固定孔104、位于第六固定孔104正下方的第七固定孔105、第十一轴孔106,第十一轴孔106位于第六固定孔104与第七固定孔105之间;所述旋转槽103槽底设有第五齿槽107;所述第六固定孔104内设有与其相匹配的第六电机108,第六电机108的电机轴端部设有与第五齿槽107内壁的齿相啮合的第六齿轮109;所述第七固定孔105内设有与其相匹配的第七电机110,第七电机110的电机轴端部设有第五齿槽107内壁的齿相啮合的第七齿轮111;所述前滚轮102内壁、后滚轮9外壁皆设有第六卡槽112,第六卡槽112通过第十二轴孔113与第五齿槽107相贯通,第六卡槽112直径大于第十二轴孔113直径;所述轮椅后支撑脚8下端内壁、前轮座95内皆设有第七卡槽114,第七卡槽114通过第十三轴孔115与第十一轴孔106相贯通,第七卡槽114直径大于第十三轴孔115;所述第六卡槽112内设有与其相匹配的第六卡板116,第七卡槽114内设有与其相匹配的第七卡板117,第六卡板116与第七卡板117之间通过第四铰接轴118相连接;所述第四铰接轴118依次穿过第十二轴孔113、第五齿槽107、第十一轴孔106、第十三轴孔115。
所述束缚结构包括若干设于第一腿部带动下臂52后侧侧壁右边和第二腿部带动下臂67后侧侧壁右边的束缚臂119、若干设于第一腿部带动下臂52前侧侧壁和第二腿部带动下臂67前侧侧壁上的束缚座120,束缚座120与束缚臂119位置相对应;所述束缚座120前侧侧壁、束缚臂119前侧侧壁上皆设有一横向嵌槽121;所述横向嵌槽121一端槽口位于束缚座120内壁上和位于束缚臂119内端面上;所述束缚臂119前侧侧壁上设有一纵向嵌槽122,纵向嵌槽122与设于束缚臂119前侧侧壁上的横向嵌槽121互为垂直并相贯通,横向嵌槽121与纵向嵌槽122之间呈T字型;所述纵向嵌槽122与横向嵌槽121相贯通的一侧侧壁、束缚座120外壁皆设有一辅助嵌槽123,辅助嵌槽123宽度大于横向嵌槽121宽度;所述辅助嵌槽123内设有与其相匹配的T型卡件124;所述T型卡件124之间通过束缚带125相连接。
本发明的使用方法如下:
首先通过外移T型卡件124,将T型卡件124从辅助嵌槽123内取出,此时束缚带125一端不再得到固定,不再呈闭环,同时解开卡扣调节腰带7,卡扣调节腰带7采用的是市场上常见的卡扣型腰带,同时可松动腰带和收紧腰带。
接着复健人员可在陪护人员的帮助下将双脚分别放置于左右两侧的脚垫89之上,然后利用绑带将复健人员的双脚固定在脚垫89上,绑带采用的则是市场上用于凉鞋上可调节长度的绑带结构,当双脚固定完成后,则可根据复健人员的大腿长度调节第一腿部带动装置的长度,根据复健人员的小腿长度调节第二腿部带动装置的长度,使第二腿部带动上臂42与第一腿部带动下臂52铰接的位置刚好处于复健人员的膝盖位置,同时保证腰部固定板5位于复健人员的腰部两侧。
需要对第二腿部带动装置的长度进行调节时,可通过第四手轮75旋动第四螺杆74,使第四螺杆74向前移动,当第四螺杆74前移时,第四手轮75不再紧压在第二腿部带动下臂67上,失去紧压力后,第一腿部带动下臂52便能够顺着第二调节孔68的轨迹向外移动,当第一腿部带动下臂52移出第二调节孔68时,由第一腿部带动下臂52与第二腿部带动下臂67组成的第二腿部带动装置的长度则会得到加长,当长度加长实际所需的长度时,停止外移第一腿部带动下臂52,接着便可再次旋动第四手轮75,使第四手轮75再次紧压在第二腿部带动下臂67上,从而使第二调节孔68内壁将第一腿部带动下臂52位于第二调节孔68内的部位紧压在第二延长臂69上,完成第一腿部带动下臂52与第二腿部带动下臂67之间的固定,此刻第二腿部带动装置的长度调节完成。
当第二腿部带动装置的长度调节完成后,便可对第一腿部带动装置的长度进行调节,调节第一腿部带动装置的长度时,可通过第三手轮50对第三螺杆49进行旋转,使第三手轮50前移并不再紧压在第一腿部带动上臂35上,失去紧压力后,第二腿部带动上臂42便可顺着第一调节孔45的轨迹向孔外移动,随着第二腿部带动上臂42外移,由第一腿部带动上臂35与第二腿部带动上臂42组成的第一腿部带动装置的长度得到加长,当长度加长到实际所需的长度时,便可停止对第二腿部带动上臂42的移动,然后再次旋动第三手轮50,使第三手轮50再次紧压在第一腿部带动上臂35上,从而使第一调节孔45内壁将第二腿部带动上臂42紧压在第一延长臂46上,完成第一腿部带动上臂35与第二腿部带动上臂42之间的固定,此刻完成第一腿部带动装置的长度调节。
当第一腿部带动装置与第二腿部带动装置的长度调节至实际所需后,第二腿部带动上臂42与第一腿部带动下臂52铰接位置刚好处于复健人员的膝盖位置,而腰部固定板5则刚好处于复健人员腰部两侧位置,由于复健人员身材不同,因此存在腰围不同,此刻则可利用第一伸缩装置与第二伸缩装置改变腰部固定板5的位置,使腰部固定板5所在位置调节至适合的位置,通过第一伸缩装置可调节左右两侧腰部固定板5的横向板501之间的间距,通过第二伸缩装置可调节左右两侧腰部固定板5的纵向板502的长度,调节左右两侧横向板501之间的间距时,可通过第一手轮15旋动第一螺杆14,使第一手轮15后移不再紧压在控制面板4上,此时腰部固定板5的横向板501则可顺着第一伸缩孔10的轨迹向孔外移动,当横向板501向着第一伸缩孔10外移动时,左右两侧横向板501之间的间距随之增大,而纵向板502随之发生移动,当纵向板502处于复健人员腰部左右两侧合适的位置后,便可停止横向板501的移动,接着则可再次旋动第一手轮15,使第一手轮15再次紧压在控制面板4上,从而使第一伸缩孔10后侧内壁将腰部固定板5的横向板501紧压在第一伸缩孔10前侧内壁上,完成腰部固定板5的横向板501与控制面板4的固定。
需要通过第二伸缩装置可调节左右两侧腰部固定板5的纵向板502的长度时,可通过第二手轮23旋动第二螺杆22,使第二手轮23上移并不再紧压在固定座6上,此时纵向板502可顺着纵向限位槽19向槽外后移,限位板16则可顺着横向限位槽18向槽外后移,随着纵向板502与限位板16后移,纵向板502与固定板0组合形成的长度则能够得到加长,从而能够满足复健人员腰部前后间距,当第二伸缩装置调节完成后,便可停止对纵向板502与限位板16的移动,接着再次旋动第二手轮23,使第二手轮23再次紧压在固定座,从而使横向限位槽18上侧槽壁将限位板16紧压在横向限位槽18下侧槽壁上,在限位板16被限制固定时,纵向板502的位置随之被固定,当腰部固定板5通过第一伸缩装置与第二伸缩装置调节至实际所需位置后,便可利用卡扣调节腰带7将腰部固定板5固定在复健人员的腰部上,然后再次将T型卡件124卡于辅助嵌槽123内,使束缚带125再次形成一个闭环,此刻复健人员的双腿位于束缚带125形成的闭环内,从而完成双腿与第一腿部带动装置、第二腿部带动装置的固定,最后复健人员再利用背带将背靠板1贴于背部获得支撑,便可完成康复机器人的安装固定。
当康复机器人安装固定后,陪护人员便可通过控制面板4输入复健的相关信息,从而通过康复机器人主动运行带动复健人员的双腿行动,无需双手支撑于双杠助行器上来进行复健,当康复机器人开始运行时,第二电机29、第三电机63、第四电机65、第五电机87在指令的作用下依序开始启动,当第二电机29启动时,第二电机29的电机轴带动第二齿轮30开始旋转,由于第二齿轮30与第二齿槽37内壁的齿相啮合,第二电机29又固定于固定臂24上,因此当第二齿轮30旋转时,第一腿部带动上臂35则会以第一铰接轴41为中心随之发生摆动,而第二腿部带动上臂42与第一腿部带动上臂35相固定,第二腿部带动上臂42则会随着第一腿部带动上臂35发生摆动,从而实现第一腿部带动装置的摆动,带动复健人员的大腿进行活动,当第三电机63与第四电机65同步启动时,第三电机63的电机轴端部的第三齿轮64与第四电机65的电机轴端部的第四齿轮66同步旋转,由于第三齿轮64、第四齿轮66皆与第三齿槽55内壁的齿相啮合,第三电机63与第四电机65皆固定于第一腿部带动下臂52上,因此当第三齿轮64与第四齿轮66进行旋转时,第一腿部带动下臂52则会以第二铰接轴61为中心随之发生摆动,当第一腿部带动下臂52发生摆动时,第二腿部带动下臂67随之发生摆动,从而实现第二腿部带动装置的摆动,最终带动复健人员小腿的运动。
当第二腿部带动装置带动小腿进行摆动时,为了保证复健人员双脚能够适应小腿的动作,脚垫89则会在第五电机87的作用下带动复健人员双脚进行动作,当第五电机87启动时,第五电机87的电机轴则会带动第五齿轮88发生旋转,由于第五齿轮88与第四齿槽77内壁的齿相啮合,第五电机87固定于脚架84上,因此当第五齿轮88发生旋转时,脚架84则会以第三铰接轴83为中心随之发生摆动,当脚架84摆动时,脚垫89随之摆动,如此实现复健人员脚步的移动。
复健人员若是在复健结束后需要进行移动时,则可将康复机器人转变至轮椅状态,此时在可启动第一电机27,当第一电机27启动时,第一电机27的电机轴则会带动第一齿轮28发生旋转,由于第一齿轮28与第一齿槽33内壁的齿相啮合,第一电机27固定于固定臂24上,因此当第一齿轮28旋转时,轮椅后支撑脚8则会以第一铰接轴41为中心发生摆动,同时第一腿部带动上臂35在第二电机29电机轴端部的第二齿轮30作用下以第一铰接轴41发生摆动,第一腿部带动下臂52在第三电机63与第四电机65的作用下以第二铰接轴61发生摆动,最终轮椅后支撑脚8、第一腿部带动装置与第二腿部带动装置呈U型状,此刻的康复机器人变形成轮椅状态,此刻后滚轮9与地面接触,接着旋转第五手轮99和第六手轮100,使第五手轮99与第六手轮100不再紧压在铰接座91上,此刻前轮座95便可以第五螺杆98为中心进行翻转,使前滚轮102原先的内侧朝外,同时前滚轮102与地面相接触,然后再次旋动第五手轮99与第六手轮100,利用第五手轮99与第六手轮100的紧压力将前轮座95固定于铰接座91上,保证前滚轮102位置改变后的稳定性,然后将T型卡件124从辅助嵌槽123内取出,从而将束缚带125从第一腿部带动装置和第二腿部带动装置上取下,束缚带125取下后,更换上新的支撑带126,支撑带126两端则可利用类似T型卡件124的结构固定于左右两侧对称分布的辅助嵌槽123内,多条支撑带126的存在能够形成轮椅的椅面,保证辅助人员能够稳稳的坐于由康复机器人转变成的轮椅上。
当康复机器人转变轮椅后,则可同时启动第六电机108、第七电机,此时第六电机108的电机轴端部的第六齿轮109、第七电机110的电机轴端部的第七齿轮111皆发生旋转,由于第六齿轮109、第七齿轮111皆与第五齿槽107内壁的齿相啮合,第六电机108与第七电机110有固定于旋转台101上,因此当第六齿轮109与第七齿轮111旋转时,前滚轮102与后滚轮9同时发生旋转,如此实现轮椅的移动。
综上所述可知,本发明可通过束缚结构将复健人员的大腿与第一腿部带动装置固定、将复健人员的小腿与第二腿部带动装置固定,通过绑带90将复健人员的脚固定于脚垫上,通过卡扣调节腰带7对复健人员腰部进行固定,而背靠板1能够在复健人员背部形成支撑,而康复人员双腿行走的动作完全由第一腿部带动装置与第二腿部带动装置带动,无需将双手支撑于双杠助行器来进行腿部复健,有效避免双手无力后便无法再进行腿部复健,有效延长复健时间,加快复健人员的康复速度,且能够有效避免双手突然无力导致复健人员摔倒受伤的情况,有效杜绝安全隐患,而康复机器人更能够在帮助复健人员完成复健后转变成轮椅状态,实现康复机器人的多功能,康复机器人能够转变成轮椅状态如同将康复机器人与轮椅二合一,有效减少了运输空间,同时能够有效减少复健费用。
- 一种多功能膝关节康复机器人
- 一种多功能康复机器人