一种用于清洁机器人的吸尘组件及基站
文献发布时间:2023-06-19 10:58:46
技术领域
本发明涉及扫地机技术领域,涉及一种用于清洁机器人的吸尘组件及基站。
背景技术
目前,在扫地机领域,扫地机、吸尘维护基站的集尘都是采用集尘盒的方式实现的,通过集尘盒收集灰尘。采用集尘盒的方式在清理灰尘时,在清理过程中,对于宠物的毛发以及带静电灰尘是很难通过倾倒模式完全清理干净,需要每使用一段时间对过滤组件以及集尘盒进行水洗或进深入清理,造成很多重复的劳动工作。
发明内容
针对以上问题,本发明提供了一种携带可拆卸尘袋且支持手动触发开闭吸尘组件,让启动吸尘作业、放置尘袋与取出尘袋的操作非常方便,具体的技术方案如下:
一种用于清洁机器人的吸尘组件,包括集尘腔,所述吸尘组件包括设置在集尘腔的内部的安装架,所述集尘腔的上方的入尘口设置有可转动的活动顶盖,所述安装架的远离入尘口的一侧安装进尘管,所述安装架的靠近入尘口的一侧安装水平导风道,水平导风道的靠近入尘口的一侧可拆卸地安装有尘袋,其中,进尘管与水平导风道相连接;水平导风道的远离入尘口的一侧安装有可转动的弹性开闭机构,安装架与活动顶盖之间设置有联动机构;弹性开闭机构和联动机构相配合,使得用户通过翻转活动顶盖抵顶联动机构,进而按压带动弹性开闭机构在水平导风道内发生转动,以连通或阻断水平导风道和进尘管。与现有技术相比,不仅采用低成本集尘袋代替现有技术的吸尘基站内部设置的集尘盒,而且通过设计吸尘基站的活动顶盖、吸尘基站内部的进尘管、以及吸尘基站内部的尘袋之间的联动、开关结构位置,使得活动顶盖与尘袋之间的过尘空间具有便于根据用户清理意愿进行控制的优点。
进一步地,当所述活动顶盖盖合所述入尘口时,所述活动顶盖用于抵顶所述联动机构来实现传递弹力按压所述弹性开闭机构,使得所述水平导风道和所述进尘管配合贯通以将所述吸尘组件外部的灰尘吸收入所述尘袋;当所述活动顶盖与所述入尘口分离时,所述活动顶盖没有用于抵顶所述联动机构,使得所述联动机构通过释放弹力来带动所述弹性开闭机构阻断所述水平导风道和所述进尘管之间的通道,以防止所述吸尘组件外部的灰尘被吸收入所述尘袋。
进一步地,所述联动机构包括插槽和联动杆,联动杆可滑动地安装在插槽内,插槽与所述水平导风道存在相连接的部位,插槽与所述水平导风道的连接位置处可转动地安装所述弹性开闭机构,使得所述活动顶盖盖合所述入尘口时联动杆在所述插槽内向下推动所述弹性开闭机构、或所述活动顶盖转动至所述入尘口的上方的预设位置时联动杆被所述弹性开闭机构向上推动;其中,插槽与所述水平导风道之间形成供所述联动杆进入的槽孔,以允许所述联动杆向下推动所述弹性开闭机构后抵顶所述弹性开闭机构,使得所述水平导风道和所述进尘管保持贯通。与现有技术相比,该技术方案使用插槽和可在插槽中滑动的联动杆,来接受来自所述活动顶盖的盖合抵顶作用,而不需电机控制组件去协助完成这一过程,让用户的操作方便,通过盖合所述活动顶盖这一动作可以轻易地启动吸尘。
进一步地,所述弹性开闭机构包括弹性元件、活动杆、枢转部和触发杆,活动杆和触发杆以固定的夹角可转动地安装在枢转部上,枢转部固定安装在所述插槽与所述水平导风道的连接位置,触发杆中与所述供所述联动杆进入的槽孔相对应的一侧面设置弹性元件,使得弹性元件在所述活动顶盖盖合所述入尘口时被所述联动杆向下挤压以推动所述触发杆和所述活动杆转动,直至所述活动杆接触所述水平导风道的内表面;或也使得弹性元件在所述活动顶盖转动至所述入尘口的上方的预设位置时推动所述联动杆在所述插槽内向上滑动,以驱动所述活动杆转动至阻断所述水平导风道和所述进尘管之间的通道;其中,活动杆的长度等于所述水平导风道的直径,活动杆的长度大于触发杆的长度,所述固定的夹角是在75度至90度之间。在该技术方案中,所述弹性开闭机构的组成结构紧凑,让所述水平导风道和所述进尘管的贯通与阻断简单,用户操作也方便,也有利于节省空间。
进一步地,所述进尘管的远离所述入尘口的一端用于连接所述清洁机器人的尘盒,所述进尘管的靠近所述入尘口的一端与所述水平导风道的远离所述入尘口的一端连接,所述水平导风道的靠近所述入尘口的一端与所述尘袋可拆卸地安装相连接。该技术方案简化所述尘袋的进尘通道结构,同时也方便用户取出所述尘袋。
进一步地,所述水平导风道的表面设置有进风口,进风口的直径与所述活动杆的长度相等,使得在所述活动顶盖盖合所述入尘口时所述活动杆盖住所述进风口且所述进风口的侧边止抵所述活动杆,以使得所述水平导风道和所述进尘管之间的通道形成密封的通道。提高所述水平导风道和所述进尘管的可靠性。
进一步地,所述进风口用于通过吸尘风机的配合作用以将所述水平导风道和所述进尘管之间的通道、尘袋都抽成真空,使得所述清洁机器人的尘盒内的灰尘垃圾通过对应的通道进入所述尘袋,其中,所述吸尘组件还包括吸尘风机。本技术方案通过进风口起到导引抽吸风的流向,比较容易连通所述水平导风道和所述进尘管,能够降低吸尘组件主体的复杂程度,降低制造成本。
进一步地,所述插槽设置限位部,用于在所述活动杆转动至阻断所述水平导风道和所述进尘管之间的通道时,限制所述触发杆以致于限制所述联动杆被所述弹性元件向上推动的位置,其中,所述入尘口的上方的预设位置是高于所述弹性元件向上推动所述联动杆所达到的最高竖直位置。该技术方案公开的所述联动杆和所述触发杆的活动控制更加容易,起到止抵转动部件的作用。
进一步地,所述活动顶盖的远离所述入尘口的一侧设置凸起结构,用于在所述活动顶盖扣合所述入尘口以抵顶所述联动杆;其中,所述活动顶盖转动至所述入尘口的上方的预设位置指的是所述凸起结构所达到的竖直高度位置。从而为所述联动杆提供更充分的作用力,保证所述触发杆连同所述活动杆更容易摆动。
一种基站,该基站内部安装所述的用于清洁机器人的吸尘组件。能够实现手动盖合顶盖来轻松自动触发集尘,省时省力。当灰尘集满后可以将集尘袋直接从扫地机的集尘腔内取出并直接弃于垃圾桶内,避免了因倾倒集尘盒内灰尘时造成灰尘的二次污染,有效节省了传统对集尘盒进行水洗或深入清理的劳动力。
附图说明
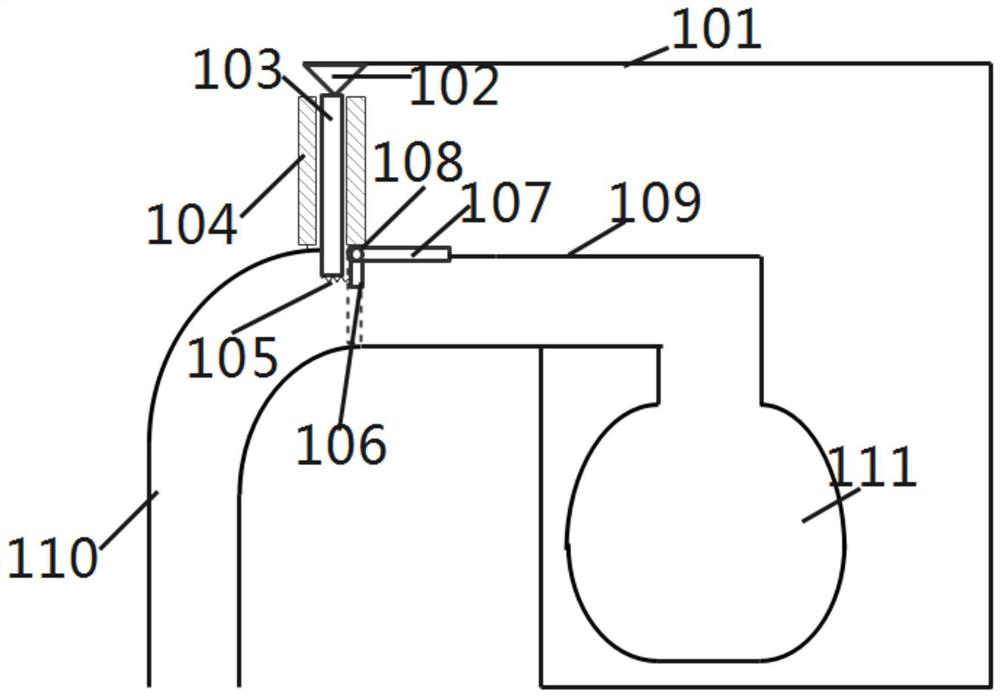
图1为本实施例公开的吸尘组件的内部结构示意图,尘袋没有处于吸尘状态;
图2为本实施例公开的吸尘组件的内部结构示意图,尘袋处于吸尘状态。
附图标记:
101、活动顶盖,102、凸起结构,103、联动杆,104、插槽,105、弹性元件,106、触发杆,107、活动杆,108、枢转部,109、安装架的水平导风道,110、安装架的进尘管,111、尘袋。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
本发明公开的一种用于清洁机器人的吸尘组件的基本构思在于:所述吸尘组件包括集尘腔、设置在集尘腔的内部的安装架,所述集尘腔的上方的入尘口设置有可转动的活动顶盖,所述安装架的远离入尘口的一侧安装进尘管,所述安装架的靠近入尘口的一侧安装水平导风道,水平导风道的靠近入尘口的一侧可拆卸地安装有尘袋,其中,进尘管与水平导风道相连接,但是进尘管与水平导风道不一定保持连通状态;水平导风道的远离入尘口的一侧安装有可转动的弹性开闭机构,安装架与活动顶盖之间设置有联动机构;弹性开闭机构和联动机构相配合,使得用户通过翻转活动顶盖抵顶联动机构,进而按压带动弹性开闭机构在水平导风道内发生转动,以连通或阻断水平导风道和进尘管。与现有技术相比,不仅采用低成本集尘袋代替现有技术的吸尘基站内部设置的集尘盒,而且通过设计吸尘基站的活动顶盖、吸尘基站内部的进尘管、以及吸尘基站内部的尘袋之间的联动、开关结构位置,使得活动顶盖与尘袋之间的过尘空间具有便于根据用户清理意愿进行控制的优点。
结合图1和图2可知,本发明实施例公开一种用于清洁机器人的吸尘组件,这个吸尘组件包括集尘腔,但是所述吸尘组件不是安装在清洁机器人内,使得集尘腔区别于清洁机器人的集尘盒。所述吸尘组件包括设置在集尘腔的内部的安装架(图中没表示出)及尘袋111,所述集尘腔的上方的入尘口设置有可转动的活动顶盖101,当需要收集清洁机器人的集尘盒内部积累的灰尘垃圾时,用户只需通过手动按压的方式将活动顶盖101盖合到所述集尘腔的入尘口(图1的右侧的矩形容器);当需要整理所述吸尘组件内部的尘袋时,用户只需通过手动打开已经盖合到所述集尘腔的入尘口的活动顶盖101即可。所述安装架的远离入尘口的一侧安装进尘管110,对应于图1的左侧的管道,所述进尘管110的远离所述入尘口的一端用于连接所述清洁机器人的尘盒,在保证密封性的基础上为所述清洁机器人的尘盒提供入尘通道;所述安装架的靠近入尘口的一侧安装水平导风道109,对应图1的右侧的管道;所述进尘管110的靠近所述入尘口的一端与所述水平导风道109的远离所述入尘口的一端连接,所述水平导风道109的靠近所述入尘口的一端与所述尘袋111可拆卸地安装相连接。水平导风道109的靠近所述入尘口的一侧(图示的右侧)可拆卸地安装有尘袋111,容易在所述集尘腔内更换新的尘袋111;本实施例简化所述尘袋111的进尘通道结构,同时也方便用户取出所述尘袋111。水平导风道109的远离入尘口的一侧(图示的左侧)安装有可转动的弹性开闭机构,以转动盖合的方式控制水平导风道109的通断。所述安装架与所述活动顶盖101之间设置有联动机构。在本实施例中,所述弹性开闭机构和所述联动机构相配合,用户通过翻转所述活动顶盖101抵顶所述联动机构,进而按压带动所述弹性开闭机构发生转动。从而方便用户控制灰尘进入所述尘袋111的流通性。需要说明的是,吸尘组件的安装架上还设置有吸尘电机,用于为所述进尘管的内部与所述水平导风道内部提供吸力或预先将所述进尘管、所述水平导风道以及所述尘袋抽成真空状态,以便于吸收所述清洁机器人的尘盒内的垃圾灰尘。
在一种实施运用中,所述活动顶盖101盖合所述入尘口以抵顶所述联动机构来实现传递弹力按压所述弹性开闭机构,使得所述水平导风道109和所述进尘管110配合贯通以将所述吸尘组件外部的灰尘吸收进入所述尘袋111,需要说明的是,用户通过翻转所述活动顶盖101盖合到所述入尘口后,保持抵顶所述联动机构,并让所述水平导风道109和所述进尘管110维持连通状态。
在另一种实施运用中,所述活动顶盖101与所述入尘口分离以使得所述联动机构通过释放弹力来带动所述弹性开闭机构阻断所述水平导风道109和所述进尘管110之间的通道,以防止所述吸尘组件外部的灰尘被吸收入所述尘袋111,需要说明的是,所述活动顶盖101被用户手动分离所述入尘口后,没有盖合在一起时,所述联动机构失去所述活动顶盖101的抵顶作用力,所述联动机构在所述弹性开闭机构的弹力作用下由图2的状态复位回图1的状态,同时,所述弹性开闭机构也开始复位回图1的状态,并让所述水平导风道109和所述进尘管110进入并保持阻断状态。
在前述实施例中,所述安装架是设计成与所述水平导风道109和所述进尘管110相互配合的装配支架结构,有效地支撑所述水平导风道109和所述进尘管110固定在所述集尘腔内,带来更好的安装效果。
结合图1和图2可知,所述联动机构包括插槽104和联动杆103,联动杆103可滑动地安装在插槽104内,插槽104与所述水平导风道109存在相连接的部位,插槽104与所述水平导风道109的连接位置处可转动地安装所述弹性开闭机构,联动杆103也是可以可拆卸地安装在插槽104内并且可竖直地穿插移动于插槽104内,同时保持与所述弹性开闭机构接触配合。其中,所述活动顶盖101盖合所述入尘口时,联动杆103在所述插槽104内向下推动所述弹性开闭机构、或所述活动顶盖101失去按压盖合后转动至所述入尘口的上方的预设位置时联动杆103被所述弹性开闭机构向上推动;优选地,插槽104与所述水平导风道109之间形成供所述联动杆103进入的槽孔(图中未表示出),这个槽孔的尺寸设计为允许所述联动杆103向下推动所述弹性开闭机构后抵顶所述弹性开闭机构,使得所述水平导风道109和所述进尘管110保持贯通。与现有技术相比,本实施例使用插槽104和可在插槽104中滑动的联动杆103,来接受来自所述活动顶盖101的盖合抵顶作用,而不需电机控制组件去控制联动杆103上下移动,转而使用人手转动开闭所述活动顶盖101协助完成这一过程,让用户的操作方便,本实施例将所述活动顶盖101的打开和关闭与所述联动机构的活动进行关联,容易利用所述活动顶盖101的启闭触发控制所述弹性开闭机构的动作,结构简单,有利于降低成本。
结合图1和图2可知,所述弹性开闭机构包括弹性元件105、活动杆107、枢转部108和触发杆106,活动杆107和触发杆106以固定的夹角可转动地安装在枢转部108上,枢转部108固定安装在所述插槽104与所述水平导风道109的连接位置,枢转部108内部设置的转轴安装在这个连接位置上,触发杆106中与所述供所述联动杆103进入的槽孔相对应的一侧面设置弹性元件105。在本实施例中,活动杆107的长度等于所述水平导风道109的直径,活动杆107的长度大于触发杆106的长度,活动杆107和触发杆106所成夹角是在75度至90度之间,枢转部108所在转轴位置为活动杆107所在轴线和触发杆106所在轴线的交点位置。
如图2所示,弹性元件105在所述活动顶盖101盖合所述入尘口时被所述联动杆103向下挤压,以推动所述触发杆106和所述活动杆107绕着枢转部108所在的轴体转动,通过推动所述活动杆107绕着枢转部108发生顺时针转动直至所述活动杆107接触所述水平导风道109的内表面,此时所述联动杆103恰好通过弹性元件105的弹性作用力的限位效果将触发杆106止抵在同一位置,则所述活动杆107也维持抵顶接触所述水平导风道109上方的内表面,如图2所示,此时,弹性元件105被挤压在触发杆106和所述联动杆103之间,若活动杆107和触发杆106所成夹角是90度,则弹性元件105的轴线处于水平方向上,触发杆106的轴线是位于竖直方向上,然后尘袋111由于所述水平导风道109和所述进尘管110配合贯通而进入吸尘状态。
如图1所示,所述活动顶盖101转动至所述入尘口的上方的预设位置时,所述联动杆103失去来自所述活动顶盖101施加的抵顶作用力,弹性元件105随之失去所述联动杆103施加的作用力,弹性元件105由挤压状态恢复到舒伸状态,进而推动所述联动杆103在所述插槽104内向上滑动,以驱动所述活动杆107绕着枢转部108发生逆时针转动至阻断所述水平导风道109和所述进尘管110之间的通道,其中,所述触发杆106的上表面变为正对所述联动杆103进入的槽孔,即所述联动杆103所在的轴线垂直于所述触发杆106所在的轴线。
综上,所述弹性开闭机构的组成结构紧凑,让所述水平导风道和所述进尘管的贯通与阻断简单,用户操作也方便,也有利于节省空间。
值得注意的是,所述进尘管110的远离所述入尘口的一端用于连接所述清洁机器人的尘盒(图中未表示出),所述进尘管110的靠近所述入尘口的一端与所述水平导风道109的远离所述入尘口的一端连接,所述水平导风道109的靠近所述入尘口的一端与所述尘袋111可拆卸地安装相连接。与现有技术相比,所述吸尘组件内部的部件数量较少且结构紧凑,简化所述尘袋的进尘通道结构,同时也方便用户取出更换所述尘袋。
作为一种实施方式,结合图1和图2可知,所述水平导风道109的表面设置有进风口,对应于图1的所述水平导风道109的上表面的开口位置;图1的进风口的直径与所述活动杆107的长度相等,如图2所述活动杆107转动的位置所示,在所述活动顶盖101盖合所述入尘口时所述活动杆107盖住所述进风口且所述进风口的侧边止抵所述活动杆107,此时,无论活动杆107和触发杆106所成夹角是否为90度,在所述联动杆103向下挤压作用下,所述弹性元件105都能够通过推动所述活动杆107绕着枢转部108发生顺时针转动,直至所述活动杆107止抵至所述进风口的侧边且维持在这一止抵位置处,此时弹性元件105受弹性作用力的限位效果而夹在触发杆106和所述联动杆103之间,不一定是在水平面上但一定保持固定的位置状态,以使得所述水平导风道和所述进尘管之间的通道形成密封的通道。提高所述水平导风道109和所述进尘管110的可靠性。
优选地,所述进风口还用于在所述活动顶盖101没有盖合所述入尘口之前、或所述活动杆107没有止抵至所述进风口的侧边时,通过所述吸尘组件内部设置的吸尘风机的配合作用以将所述水平导风道109和所述进尘管110之间的通道、尘袋111都抽成真空,使得所述清洁机器人的尘盒内的灰尘垃圾通过相应的通道进入所述尘袋,其中,吸尘风机可以安装在所述集尘腔内的风机室或所述安装架上,有利于通过所述进风口导引所述进尘管110的抽吸风的流向,比较容易连通所述水平导风道和所述进尘管,能够降低吸尘组件主体的复杂程度,降低制造成本。所述集尘腔内若设置风机室,则设计相应的连通所述进风口的风道及排风口。
优选地,所述插槽104设置限位部,用于在所述活动杆107转动至阻断所述水平导风道109和所述进尘管110之间的通道时,限制所述触发杆106以致于限制所述联动杆103被所述弹性元件105向上推动的位置,防止所述联动杆103从所述插槽104内脱离,其中,所述入尘口的上方的预设位置是高于所述弹性元件105向上推动所述联动杆103所达到的最高竖直位置。使得所述联动杆103和所述触发杆106在图1和图2所示的实施例中的活动控制更加容易,起到止抵转动部件的作用。
在前述实施例的基础上,所述活动顶盖101的远离所述入尘口的一侧设置凸起结构102,用于在所述活动顶盖101盖合所述入尘口且抵顶所述联动杆103;优选地,在所述活动顶盖101盖合所述入尘口时,凸起结构102与所述入尘口内部设置的卡扣部位相扣合,实现用户通过翻转所述活动顶盖101盖合到所述入尘口后,保持抵顶所述联动机构,并让所述水平导风道109和所述进尘管110维持连通状态。其中,所述活动顶盖101转动至所述入尘口的上方的预设位置指的是所述凸起结构103所达到的竖直高度位置,如图1所示,从而为所述联动杆103提供更充分的作用力,保证所述触发杆106连同所述活动杆107更容易摆动。
优选地,所述水平导风道109的靠近所述入尘口的一侧安装有杀菌器件和容器检测件。杀菌器件用于对进入所述尘袋的灰尘垃圾进行消毒杀菌,容器检测件用于检测所述水平导风道109是否安装所述尘袋,可以在所述活动杆107转动至阻断所述水平导风道109和所述进尘管110之间的通道时,所述安装架触发检测开关,从而检测是否安装所述尘袋111。杀菌器件可以为杀菌灯或负离子发生器,可有效防止尘袋内灰尘放置时间长后产生异味,带来更好的抗菌效果。
在一些实施方式中,由柔性材料制成尘袋111包括开口部和容纳部 ,开口部与所述水平导风道109的靠近所述入尘口的一端通道口连接,且开口部的形状和大小与这个通道口的形状和大小相适配,所述清洁机器人的尘盒内的灰尘和垃圾通过所述水平导风道109进入尘袋111后,容纳部的空间体积在预设范围内变化。
一种基站,该基站内部安装前述实施例的用于清洁机器人的吸尘组件。能够实现手动盖合顶盖来轻松自动触发集尘,省时省力。当灰尘集满后可以将集尘袋直接从扫地机的集尘腔内取出并直接弃于垃圾桶内,避免了因倾倒集尘盒内灰尘时造成灰尘的二次污染,有效节省了传统对集尘盒进行水洗或深入清理的劳动力。
在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之 “下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
上文的公开提供了许多不同的实施方式或例子用来实现本发明的不同结构。为了简化本发明的公开,上文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本发明。此外,本发明可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。此外,本发明提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
以上所描述的装置实施方式仅仅是示意性的,其中所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施方式方案的目的。本领域普通技术人员在不付出创造性劳动的情况下,即可以理解并实施。
- 一种用于清洁机器人的吸尘组件及基站
- 一种吸尘基站、清洁机器人及清洁系统