植物繁殖系统、装置和方法
文献发布时间:2023-06-19 10:58:46
本申请要求于2018年7月13日提交的澳大利亚临时申请号2018902543、2018902545和2018902546的权益,每个临时申请的全部内容明确地通过引用合并在本文中。
技术领域
本公开涉及用于种植和繁殖植物的系统、方法和装置,并且更具体地,涉及用于在植物组织培养中种植植物的系统、方法和装置。
本发明已经被开发来主要用于在植物组织培养下种植植物,并且将主要在这个背景下进行描述。然而,应当领会,本发明不限于这个特定的使用领域,其潜在地可应用于包括无菌和非无菌应用在内的多种应用中,特别是基于温室和室外环境的应用。
背景技术
以下对现有技术的讨论旨在将本发明置于适当的技术环境中,并且使本发明的优点得到更充分的理解。但是,在整个说明书中对现有技术的任何引用都不应解释为明确或隐含地承认该技术在相关领域中是众所周知的或是公知常识。
商业植物组织培养(PTC)是园艺行业植物的克隆微繁殖,包括家庭和景观观赏植物、切花、植被恢复、园艺粮食作物、药用作物和林业。与种子和无根扦插生产(URC)方法相比,PTC在历史上一直是一种昂贵的植物繁殖方法,但是PTC发现了待产生的难以繁殖植物和用于必须以高健康状态供应的植物的小生境(niche)。
据估计,澳大利亚每年种植约1500万-2000万PTC,全世界每年种植约5亿PTC,但这仅是经由种子或无根扦插(URC)或标准扦插繁殖的全年园艺植物总产量的一小部分。例如,个体植物育种家和繁殖公司每年可在欧洲生产超过5亿枚URC菊花,用于切花生产;澳大利亚每年种植超过8亿棵糖甘蔗苗;在美国每年约有15亿棵林业树木由林木苗圃生产和运输。
除与URC、扦插或种子相比的成本外,许多植物将优先由PTC生产,因为与种植者的种子、插枝或URC相比,PTC的农作物具有很多优势,包括健康状况、非季节性、增加分支和整体早期增长活力。
例如,在澳大利亚,估计种植者每年种植约160,000吨经高健康状态认证的种用马铃薯。这些种用马铃薯由1-2百万个高健康PTC生产,然后在露天场地种植和繁殖长达4年,以降低种植者的成本。然而,这样做会使种用马铃薯在膨大的同时暴露于病原体达4年。通过降低PTC的成本,将增加PTC的使用数量,减少或取消大田生产的代数,从而使农民获得更多的健康存量。
PTC的主要成本与劳动力相关联,在某些地区,每个PTC生产的总运行成本中80%以上是生产工资。这导致PTC公司转向更低工资的环境。
此外,据估计,在工资低于每小时2美元的发展中国家中,工资可以大大降低(例如,每个PTC降低至1-3美分)。
但是,这些国家的工资正在增长,并且通常与需要植物的市场相距遥远,因此运输和检疫是一项额外的主要成本,对于寄往澳大利亚的托运货物,每个PTC将增加5-20美分,而从这些国家到其他主要市场的费用也估计与此类似。
航运延误可能会对正在装运的PTC[和URC]的成活力造成灾难性的影响,并且可能使成本一年增加30%。这导致对于客户是不可靠的供应的主要因素。植物的国际流动也是所有国家和行业的主要生物安全风险,并且已经记录了许多通过国际贸易被引入国家的新疾病病例。
来自较不发达国家的PTC繁殖的植物仍然比较发达国家中在市场附近进行的种子或扦插生产贵。目前在澳大利亚,与澳大利亚种植的PTC的售价每PTC为0.80至1美元相比,来自低工资国家的PTC的售价每PTC为0.25-0.45美元。相比之下,根据品种和来源,可获得的种子的平均成本为每颗种子不到0.05美元,和可获得的URC的平均成本在0.10美元到0.40美元。所有这些产品都必须生长为最终客户/种植者可用的形式(即,硬化穴盘),并且目前硬化穴盘价格是,与PTC的0.70美元到1+美元相比,幼苗为0.15美元至0.40美元,扦插为0.30美元至0.75美元。
一直以来,PTC生产商的目标都是为克隆PTC开发自动化程序,以使生产能够在市场附近进行,并且允许PTC用作扦插生产或种子的可行替代方案。如果能够实现具有竞争力的PTC生产价格,这也将使PTC生产重新回到使用最多的克隆生产的植物的高工资国家。回到高工资国家反过来将消除国际航运和检疫问题。
在1990年代,Forbio Pty Ltd成功地建立了4台PTC机器人,其使用视觉系统和带有一组可重复人工操作的工具的机械臂。然而,实际上,机器人最多只能将劳动力成本减少一半左右;植物仍要单独处理,并且仍需要操作员的高度参与。该机器也非常昂贵且不可靠。这些机器在被搁置之前,已在印度尼西亚的Monsanto Forestry运作了约2年。
澳大利亚昆士兰的NuPlant生产了Smartclone机器人,一个机械臂和带有塑料吊舱系统的工具。但是,这个系统仍然依靠人工来决定在哪里切割/分割植物,并且手动地切割植物。因此,这个机器再又受限于人工的速度,并且与低工资国家的成本相比并没有显着降低工资成本。
荷兰的VitroPlus通过利用在液体培养基系统中的蕨类配子体的系统实现了蕨类植物的自动化培养,该系统能够进行混合,以允许经由无菌液体分配过程每小时大量繁殖和分配数千植株[孢子体]。然而,与其他植物相比,蕨类植物的生命周期截然不同,这使得它们可以以这种方式种植。除藻类外,这种技术尚未成功用于其他任何植物。
尽管如此,VitroPlus现在仍被某些人视为最成功的PTC公司,并且从其荷兰基地出口商品到世界上大多数国家。
除机器人外,还对多种多样的农作物进行了其他方法的测试,以降低植物繁殖的成本。生物反应器是常用的,这些方法中有许多涉及体细胞胚胎发生,并结合使用人工种子技术将植物交付给消费者。这些中很少(如果有的话)已经成功地商业化为克隆繁殖工具,因为体细胞胚胎发生通常导致不可靠的克隆生产,并且随着体细胞胚胎的产生形成许多异型/突变。
此外,在生物反应器中种植的植物经常发生生理变化,这使得在该过程后种植植物变得更加困难和昂贵。因此,需要提供一种PTC繁殖系统,其解决了其他现有技术中常见的体细胞胚胎发生的一个或多个缺点,例如突变、玻璃化和较差的再生成功率。
根据目前的技术,据估计,目前,一个人工操作员每小时可以繁殖约150-200株植物。因此,本公开的目的是提供一种能够增加PTC繁殖速率的系统。
PTC常规商业使用的另一个缺点是在“开盒”阶段遇到的。在开盒过程中,将在丰富的无菌安全环境的PTC容器中生产和培育的关注植物的幼苗和克隆株从容器中移出,并且被“引入”到标准的植物苗圃条件中。当前,在开盒阶段,高工资国家的工作人员将从低工资国家收到的PTC单独地放入一个穴盘托盘中。这是种植者的另一项主要费用。
PTC通常在容器中种植,该容器在容器的整个区域中随机放置1到约50棵植物。这些植物在PTC的每个阶段都进行单独处理。这些植物然后被手动地并且通常被单独地移到温室中以进行硬化。污染是一个主要问题,由于人为操作,与传统PTC和其他温室繁殖方法相关联的成本也是一个主要问题。
PTC通常是在带有无菌凝胶介质的密封容器中进行的,该凝胶介质在使用前经过消毒并且放入容器中。该容器通常由带有聚丙烯螺旋盖的玻璃或聚碳酸酯制成,可循环使用,或位于一次性聚丙烯容器中并且夹在盖上。
这种设计的缺点是,如果不转移到另一个容器上就无法更换培养基或处理植物,这会带来相关的高人工和时间成本。
胶凝剂会影响植物的生长,但是大多数不断浸入液体介质(甚至部分浸入液体介质中)的植物常常会出现诸如玻璃化(超含水态)之类的生理条件,,这会降低植物成功种植或开盒的能力。临时浸入系统通过每天几次将液体介质引入到植物室中几分钟,成功克服了胶凝剂和持续不断的液体暴露的弊端,以允许植物吸收养分并且暴露于植物激素中,然后排干并且暴露降低湿度和空气干燥,使它们不会出现任何生理问题。
大多数TIS系统使用气压和复杂的两室容器或具有许多内部零件的容器来迫使液体介质从下向上进入植物室,因此需要气泵和控制装置以及空气过滤器和坚固的密封件来维持无菌系统。
本公开的目的是克服或改善当前系统和方法的一个或多个缺点,或者至少提供一种有用的替代方案。
发明内容
根据本发明的第一方面,提供了一种植物繁殖系统,包括:
用于以相对间隔的关系保持至少两株植物的保持器,从而使得能够在单次通过期间对保持器内的每株植物执行预定的操作。
在一些实施例中,该操作是切割操作。在一些实施例中,切割操作每次顺序地在单株植物上执行一次。在一些实施例中,切割操作基本上同时地在保持器内植物中的两株或更多株上执行。在一些实施例中,切割操作基本上同时地在保持器内植物中的预定株数上执行。在一些实施例中,切割操作基本上同时地在保持器内的每株植物上执行。
在一些实施例中,切割机构被提供来用于切割保持器内的每株植物。在一些实施例中,切割机构具有切割元件,该切割元件可相对于保持器移动,从而实现切割操作。优选地,切割机构被配置成或布置成在使用时从大体上横向于或垂直于每株植物的茎的纵轴的方向切割每株植物。即,切割机构优选地被配置成轴向或侧向切割每株植物,更优选地轴向或侧向切割每株植物的茎。
在一些实施例中,保持器包括具有两个或更多开口的托盘或板,每个开口被配置成接收植物的至少一部分。优选地,每个开口专用于接收单株植物的一部分。优选地,每个开口形成用于各株植物的通孔或通道,由此植物能够通过托盘向上生长。
在一些实施例中,每个托盘具有相同的外围轮廓或形状。在一些实施例中,每个托盘的形状通常为矩形。在其他实施例中,每个托盘通常可以是正方形、圆形、椭圆形、多边形或包括不规则形状的其他合适轮廓。
每块板优选地具有预定的厚度。例如,每块板的厚度或高度可以为8mm、10mm、12mm、15mm、18mm、20mm或25mm。将领会的是,每块板的厚度或高度不限于上面列出的示例性值,而是可以选择厚度或高度以适合特定种类的植物。
在一些实施例中,每个托盘中的开口的形状都相同。每个开口可以具有规则或不规则形状。在一些实施例中,每个托盘中的开口的大小都相同。在一些实施例中,每个托盘可以包括各种形状和大小的开口。在一些实施例中,每个托盘中的开口的(横截面)形状选自包括但不限于以下项的组:圆形、椭圆形、正方形、矩形、三角形、六边形和其他多边形形状。
在一些实施例中,每个托盘中的开口以规则或不规则的阵列或图案进行布置。在一些实施例中,每个托盘中的开口以环形阵列进行布置。例如,开口可以被布置为形成正方形阵列、偏距阵列,其中交替的行以预定的程度(例如,开口大小的50%)错列,从而使得相邻开口之间的间距减小,这样,每块板还可以根据需要提供额外的开口。优选地,每个托盘具有相同的开口轮廓和图案。
在一些实施例中,保持器包括两个或更多托盘或板,板可堆叠以形成板塔。优选地,每块板具有相同的形状和配置。应当领会,在垂直塔或堆叠中布置两个或更多托盘或板的能力有利地允许通过将来自一个托盘的孔与第二托盘以及堆叠在第一托盘上的任何其他托盘的相应孔对准,来构造适合于特定植物种类的预定高度的贯通通路,其中植物可以从中向上生长。以这种方式,多个托盘能够彼此堆叠,使得相应的孔对准并且相关联的一个或多个贯通通路被形成为具有对应于托盘堆叠中的托盘的厚度的预定高度。
在一些实施例中,每个托盘被配置为使得被紧密地接收在生物反应器的基部内。在一些实施例中,每个托盘被配置为使得其宽度基本上对应于生物反应器的基部的内部宽度。在一些实施例中,每个托盘被配置为使得其长度基本上对应于生物反应器的基部的内部长度。在一些实施方式中,每个托盘被配置成使得两个或更多不同的托盘堆叠能够被布置在生物反应器的基部内,从而增强种植过程和托盘在使用中能够被操纵和处理的方式的灵活性。例如,生物反应器的基部和托盘可以被配置为在其中接收两个、三个或四个不同的托盘堆叠。
在某些形式下,每个托盘的大小和配置都使其能够从生物反应器转移到生长过程的下一个阶段,既可以手动操作,也可以使用现有的托盘处理设备(例如,从无菌环境转移到非无菌环境)。这是特别有利的,因为它避免了将植物从生物反应器托盘转移到第二阶段托盘例如温室或室外托盘的需要。在一些实施例中,每个托盘可以具有一个或多个连接器,用于以并排和/或端对端的关系将托盘可释放地连接在一起,从而有效地形成更大的组合托盘。在一些实施例中,托盘的第一侧面和/或末端可以具有一个或多个第一连接器,并且托盘的第二侧面和/或末端可以具有一个或多个第二连接器,其中各第一侧面和第二侧面和末端连接器被适配为彼此可释放地接合以将两个或更多托盘连接在一起。这样的较大的组合托盘可以有利地用于使托盘容易搬运,特别是当托盘包括准备用于下一阶段的发育从无菌(实验室)环境转移到非无菌(温室或室外)环境的植物时。应当领会,以这种方式,可以生产大小为在离开无菌环境后与植物进一步发育中使用的相关下游工艺和系统相关联的搬运设备(例如手动或自动搬运设备)内工作的托盘或组合托盘装置。
在一些实施例中,每块板或托盘具有均匀的厚度。在一些实施例中,每块板或托盘可以包括厚度减小的一个或多个部分,从而有利于从堆叠的托盘中选择和移除期望的托盘或托盘的子集,和/或使在托盘堆叠中的相邻托盘之间容易执行操作。在一些实施例中,每个托盘可以包括其中形成有开口的主体部分或中央主体部分,以及从各托盘的边沿向外延伸的一个或多个突出部,从而有助于对托盘的操作。
在一些实施例中,每个托盘或板可以具有互补的定位元件,用于定位和可释放地保持相邻的托盘对齐,从而促进使板的堆叠的形成以及增强堆叠的结构完整性。在一些实施例中,互补定位元件可以包括与每个托盘的上表面相关联的第一定位元件(例如,凸耳或凹部)和与每个托盘的下表面相关联的第二定位元件(例如,凹部或凸耳),从而第一定位元件可以可释放地接合第二定位元件,以定位各托盘并且使各托盘对齐。然而,优选的是,在托盘上不形成定位元件,使得在相邻的托盘之间没有障碍物延伸,从而使得能够在一对相邻的托盘之间自由地进行切割操作。
在一些实施例中,由托盘的开口限定的通道用于在植物长大通过通道时引导并且在必要时支撑植物。优选地,各开口的侧壁的内周表面用于限制植物在通道内的横向运动的程度,从而在大体上向上或垂直的方向上引导植物。在其他实施例中,可以提供专用的引导构件。
在某些实施例中,保持器可以包括一个或多个用于保持每株植物的抓握元件或抓握机构。例如,每个抓握元件或抓握机构可以包括可在用于插入和移出植物的打开位置与用于保持每株植物的闭合位置之间移动的一个或一对钳口。在某些实施例中,抓握元件可以例如通过提供预张紧的螺旋弹簧或其他合适的机械偏置元件而偏向闭合位置。
在一些实施例中,切割操作可以通过一对板之间的相对平移滑动来实现。在一些实施例中,切割机构可以被配置为在板的堆叠中的一对板之间执行切割操作。在一些实施例中,切割机构可以被配置为在板的堆叠中的每对板之间执行切割操作。在一些实施例中,切割机构可以被配置为在堆叠中的成对的板中的一些对之间执行切割操作。在一些实施例中,切割机构可以被配置为基本上同时地在堆叠中选定的每对板之间执行切割操作。
在一些实施例中,切割机构包括用于手动切割植物的专用手持式切割工具,优选地被配置为同时切割两株或多株植物。在一些实施例中,切割机构可操作地与控制器相关联,从而有利于植物的自动或半自动切割。例如,切割元件可以被(直接或间接地)连接到致动器,从而相对于托盘的堆叠定位和移动切割元件,从而产生期望的切割动作。在一些实施例中,切割机构(例如,刀片、激光器、线元件等)可以被连接至线性致动器或作为机械臂上的末端执行器。
在一些实施例中,切割工具包括刀片形式的切割元件。在一些实施例中,切割工具可以包括手柄部分,切割元件被连接到手柄部分。在一些实施例中,切割工具包括呈相对薄的板状元件形式的切割元件,该切割元件被适配为被可滑动地设置在相应的一对相邻托盘之间,从而在植物上进行侧向切割操作。在其他形式中,切割机构可以包括被可滑动地接收在相应的一对相邻的托盘之间的一定长度的小规格金属丝,从而实现切割操作。
在一些实施例中,切割元件被可移动地连接到手柄部分,以在刀片大致远离手柄部分延伸的操作位置和切割元件与手柄部分相邻的非操作位置之间移动。例如,切割元件可以被可枢转地或铰接地连接至手柄部分。在一些实施例中,手柄可操作地与切割元件相关联,使得手柄的运动引起切割元件的相应运动。在一些实施例中,手柄与切割元件可操作地相关联,使得手柄在第一方向上的线性运动引起切割元件的相应切割运动。在一些实施例中,手柄与切割元件可操作地相关联,使得手柄在第二方向上的线性运动引起切割元件的相应缩回运动,从而一旦切割操作完成就使切割元件缩回。在一些实施例中,手柄与切割元件可操作地相关联,使得手柄在第一方向上的旋转运动引起切割元件的相应切割运动。在一些实施例中,手柄与切割元件可操作地相关联,使得手柄在第二方向上的旋转运动引起切割元件的相应缩回运动,从而一旦切割操作已经完成就使切割元件缩回。
在一些实施例中,切割元件被配置成在切割操作期间摆动或振动。在一些实施例中,摆动或振动可以在垂直方向上,水平方向上,一个或多个对角线或离轴方向上,或其组合上。
在其他形式中,切割机构可以包括被适配为使激光束在相邻的托盘之间通过的激光系统,或被适配为使流体(例如,水)流在相邻的托盘之间通过以实现切割操作的高压喷嘴。激光束或者流体射流或流体流可以以连续的方式施加在横跨各托盘的长度的一个或多个通路上,直到切割操作完成为止。在其他形式中,激光束或流体(水)流可以以脉冲形式进行施加,可选地以预定的时间间隔或选择性地经由被适配为用户手动操作的致动器(例如,按钮或触发器)施加。在某些实施例中,切割机构可以被适配为直接或间接地在植物上执行振动动作以促进切割动作,或者单独地或者与一个或多个其他切割装置或机构结合地进行。
在一些实施例中,板或板的堆叠被适配为装配在容器或器皿中,优选地在开顶式容器中。容器或器皿优选地被适配为形成用于种植植物的生物反应器。优选地,容器具有基部和盖部,该基部具有用于在其中可释放地接收托盘的堆叠的开放顶部,该盖部可释放地围绕基部的开放顶部附接,从而闭合容器。优选地,该盖围绕其开放顶部密封地接合基部。
在一些实施例中,密封元件位于盖和基部的开放顶部的外围之间,从而增强盖和基部之间的密封接合。优选地,密封元件是弹性可压缩的。在一些实施例中,盖部包括围绕其外围延伸的通道,该通道被适配为将密封元件容纳于其中。在一些实施例中,密封元件为连续环的形式。优选地,连续环被配置为对应于盖形状的形状。在一些实施例中,连续环可以是大体矩形的形状,可选地具有圆角。在一些实施例中,密封元件具有预定厚度的均匀横截面轮廓。在一些实施例中,密封件的厚度对应于通道深度的约一半,由此密封件的第一(下)半部被接收在与基部相关联的通道中,而密封件的第二(上)半部被接收在与生物反应器的盖部相关联的通道中。
在一些实施方式中,生物反应器的基部和盖部具有相同的形状和构造。在这样的实施例中,基部和盖部可以互换使用,这是有利的,因为不需要在使用许多生物反应器的植物繁殖系统内识别和放置生物反应器的分开的部分。
在一些实施例中,每个盖部具有被布置在开口端的外围边沿处或附近的一个或多个定位元件,从而帮助将基部定位在其上以闭合容器/生物反应器和/或保持基部和盖部之间的对齐。在一些实施例中,每个基部具有被布置在开口端的外围边沿处或附近的一个或多个定位元件,从而帮助将基部定位在其上以闭合容器/生物反应器和/或保持基部和盖部之间的对齐。在一些实施例中,该定位元件或每个定位元件是突出于相关联的外围边沿的突耳。在一些实施例中,定位元件包括围绕相关联的盖或基部的外围边沿被布置在预定的离散位置处的多个突耳。在一些实施例中,每个盖或基部包括一对突耳,该对突耳中的每个突耳被布置在开口的斜对角处。
在一些实施例中,容器具有至少一个端口,营养物供给能够通过该端口被填充入容器中或从容器中被排出。在一些实施例中,营养物供给处于液态。
优选地,容器具有专用入口,营养物供给能够通过该入口被填充入容器中,从而促进植物生长。在一些实施例中,入口朝向容器的上部区域布置。在某些形式中,入口可以被布置在容器的基部中。在其他形式中,入口可以被布置在容器/生物反应器的盖部中。在一些实施例中,容器具有两个或更多个入口,由此每个入口能够用于将营养物供给的单独的组分或成分填充到容器中。优选地,容器具有至少一个专用出口,营养物供给能够通过该出口从容器中被排出。在一些实施例中,出口朝着容器的基部的下部区域布置。
优选地,容器被配置成使得当将一定量的营养物供给填充到基部时,营养物供给集中在容器的基部处,从而与植物的一部分接触;例如植物的根系或基部。在一些实施例中,板或板的堆叠中的至少最下部板可定位在容器内,使得在使用中,每株植物的下部或有根部分浸入在营养物供给中,或以其他方式与营养物供给接触。
优选地,容器包括可释放的锁定机构,用于在闭合位置将盖部牢固地锁定到基部,从而促进它们之间的密封接合。在一些实施例中,锁定机构起到将容器的盖部和基部彼此正向拉动的作用,从而有助于压缩密封元件(如果有提供),并且增强密封效果。
在一些实施例中,提供了一种介质输送系统,其被适配为流体连接至容器,以选择性地将营养物供给供应至容器的内部(例如,基部)。在一些实施例中,介质输送系统是重力进给系统。在一些实施例中,介质输送系统是压力进给系统。在一些实施例中,介质输送系统包括压力进给系统和重力进给系统两者的组合。
优选地,介质输送系统包括用于容纳预定量的营养物供给或营养物供给的一种或多种成分的营养物容器。优选地,提供导管或供应线以在营养物容器和其中种植植物的生物反应器之间引导营养物供给的流动。导管优选地为一段中空圆柱形管的形式。导管优选地在其第一端可连接到营养物容器的端口,在其第二端可连接到与生物反应器相关联的端口,使得营养物供给能够被填充到生物反应器和/或从生物反应器中排出,从而有助于预定的配量方案以促进生物反应器内植物的生长。
在一些实施例中,该配量方案可以包括将单批或一定量的营养物供给递送至容器,由此在预定的时间间隔内,可选地,在整个生长期内,营养物供给与植物的一部分(例如,基部、根系或其他部分)保持接触。
在其他实施例中,配量方案可以是临时浸入方案,其中预定量的营养物供给在第一预定离散时间间隔内被重复地填充到容器中,并且随后在第二预定离散时间段内从容器中排出,由此营养物供给向容器的填充和从容器的排出发生了预定的循环次数和/或预定的持续时间。
在一些实施例中,营养物容器是相对刚性的(例如,塑料瓶)。在一些实施例中,营养物容器是柔性的(例如,柔性的囊状物或袋)。优选地,激活机构与营养物容器可操作地相关联,该激活机构被配置成在营养物供给被迫从营养物容器中排出填充到容器/生物反应器中的作用位置和营养物供给被阻止流向容器的非作用位置之间运动。在一些实施例中,激活机构是与供应线流体连通的可选择性操作的营养物供应阀。
在使用柔性营养物容器的一些实施例中,激活机构被适配为在其作用位置压缩或挤压柔性营养物容器或以其他方式(暂时地)使柔性营养物容器变形,从而迫使营养物供给经由供应线从营养物容器流向该容器。在这样的实施例中,当激活机构返回到其非作用位置时,激活机构解开或至少部分地释放其与柔性营养物容器的接合,使得营养物供给自由地经由供应线返回至营养物容器。
在一些实施例中,例如单向阀或止回阀等防回流机构与供应线相关联,以在激活机构处于其非作用位置时防止营养物供给的回流。在一些实施例中,当激活机构处于非作用位置时,营养物供给能够经由供应线从容器自由地排出,可选地返回到营养物容器(例如,在临时浸入配量方案中)或废弃。
在一些实施例中,营养物控制器与介质输送系统可操作地相关联,该营养物控制器被适配为促进对配量方案的自动或半自动控制。在一些实施例中,营养物控制器被适配为帮助用户手动操作并且因此促进对配量方案的选择性手动控制。
在一些实施例中,该系统包括用于板的无菌搬运或板的堆叠的载体。优选地,载体被配置成使得其能够被用来承载期望数量的板。在一些实施例中,载体被配置为使得它能够承载整个板的堆叠。例如,一旦其中种植的植物已经达到预定的发育或生长阶段,则载体可以被适配为从生物反应器的基部提升并且移走整个托盘堆叠,其中移出的带有植物的托盘堆叠可以被放置为能够对板的堆叠中的植物进行切割(或其他所需的)操作。在一些实施例中,载体被配置为使得它能够被用于承载整个板的堆叠中的一组或子集。
在一些实施例中,每块板具有提升构造以促进与载体的接合。在一些实施例中,提升构造包括与每块板的相应侧边沿相关联的一对脊、凹口或开口。
在一些实施例中,载体包括手柄和从该手柄延伸的一对臂,该臂被适配为接合托盘或托盘的堆叠,由此载体经由手柄的运动引起托盘的相应运动以用于所需的定位(例如用于从容器中无菌取出托盘)。优选地,臂从手柄向下延伸,从而在使用中使臂能够从上方延伸到容器的基部中,然后接合托盘的堆叠。
在一些实施例中,每个臂可以具有与其远端相关联的托盘接合构造。例如,每个臂可以具有从其横向延伸(即,向内朝向彼此)延伸的轨道或唇部。优选地,每个托盘可以具有被适配为与载体接合的臂接合构造,从而有利于托盘的无菌搬运。例如,每个托盘可具有接收构造,例如与各托盘的侧边沿相关联的切口或凹部,该接收构造被适配为可释放地接收轨道或唇部。
在一些实施例中,该对臂朝向彼此偏置,从而促进与托盘或托盘的堆叠的接合。在一些实施例中,例如按钮或触发器的操作构件与臂可操作地相关联,其中,操作构件的操作使臂抵抗偏置机构的作用而彼此远离。优选地,操作构件可由使用者的手或手指选择性地操作。
在一些实施例中,一对臂以固定的间隔关系被保持,其中,提升元件(例如,凸耳、销、板等)被布置和配置成可相对于相应的臂(例如,通过触发器或其他用户操作)移动以接合至少一个托盘以提升一个或多个托盘。使用固定间隔的臂会特别有利,因为其防止提升过程中臂之间的相对运动,从而减少了在将托盘或托盘的堆叠放置到所需的安全位置(例如,植物繁殖系统所使用的切割工位或其他工位或区域)之前释放或掉下托盘或托盘的堆叠的可能性。
在一些实施例中,载体可以包括除机械臂之外的用于抓握和移动托盘的装置,如上所述。例如,在某些实施例中,载体可以包括用于抓握托盘的元件,其选自但不限于以下项:夹持装置,磁性装置,吸力装置,螺纹装置等。
在一些实施例中,提供了用于以相对对齐,优选地竖直对齐的方式保持托盘的堆叠的托架,由此由各托盘的对齐的开口形成的通路被保持在打开位置。
在一些实施例中,托架包括底板部分,一对侧边沿部分从底板部分向上延伸,使得能够将托盘的堆叠接收其间。优选地,侧边沿部分在一定程度上间隔开,使得托盘的堆叠紧密地接收在其间,从而限制托盘的横向运动并且保持其对齐。
在一些实施例中,托架包括止挡件,托盘的堆叠能够抵靠在其上,从而限制托盘相对于托架的底板部分向后移动的程度。在一些实施例中,止挡件包括从每个侧边沿部分横向地延伸的凸缘,优选地向内朝着底板部分的中心线延伸。
在一些实施例中,提供了升高构件,用于使底板部分的前边沿相对于其后边沿升高,由此在使用中,底板部分从前向后向下倾斜,使得托盘的堆叠趋向于自身定位以抵靠止挡件。优选地,升高构件是与底板部分的前边沿相关联的向下延伸的前唇边沿。
在一些实施例中,底板部分包括减摩的元件,用于减小托盘的堆叠与底板部分之间的摩擦,从而使托盘的堆叠容易在底板部分上相对平移滑动,从而在将托盘移入或移出托架时帮助保持托盘的堆叠对齐。例如,减摩的元件可以包括一个或多个凸起的减摩轨道,优选至少两个凸起的减摩轨道,其突出在底板部分的上表面上方。优选地,底板部分具有一对平行的减摩轨道。
在一些实施例中,提供了分隔板,用于在切割操作之后将托盘的堆叠分成较小的子堆叠。优选地,分隔板被形成为薄板结构,使得其能够在一对相邻的垂直堆叠的托盘之间滑动,从而形成平台以帮助将托盘的子堆叠从初始堆叠上提起。
根据本发明的另一方面,提供了一种用于向生长中的植物输送营养物供给的系统,该系统包括:
用于保持预定量的营养物供给的营养物容器;和
与营养物容器可操作地相关联的激活机构,由此激活机构的操作使至少一部分营养物供给从营养物容器流出或流向营养物容器。
优选地,营养物供给处于液态,由此能够容易地控制其根据需要流入和流出营养物容器。在一些实施例中,营养物供给可以形成营养物供给混合物的一种成分,其中其能够根据预定的成分剂量比与营养物供给混合物的一种或多种其他成分组合。
该系统特别有利于用于向植物组织培养(PTC)中种植的植物输送液体营养物供给。因此,将参考这种PTC应用,仅通过示例来描述该系统。然而,该系统具有广泛应用的潜力,并且能够容易地被适配为用于种植植物的多种其他系统、工艺和装置。
特别地,本系统能够有利地被配置为用于向在种植各种植物类型的系统中使用。例如,该系统能够用于在预定的配量方案下输送营养物供给,以积极地促进各种类型的植物的生长,包括但不限于树状植物和无茎植物。树状植物一般地被称为树木状植物,通常具有单个茎或主干。无茎植物典型地在地面或土壤高度以上几乎没有茎或没有茎,有时被称为簇生的或莲座丛型植物。
选择性可控阀优选地与端口可操作地相关联,从而有效地打开和关闭端口,从而控制营养物供给的流动。优选地,该阀可在第一状态或打开状态和第二状态或闭合状态之间进行选择性操作,在第一状态或打开状态中,营养物供给能够流过端口(流入或流出),在第二状态或关闭状态中,营养物供给被阻止流过端口(流入或流出)。
在一些实施例中,阀被配置为可手动操作,由此需要用户的手动操作以使阀在其第一(打开)状态和第二(闭合)状态之间移动。在一些实施例中,该阀与控制单元可操作地相关联,从而使阀能够在其第一(打开)状态和第二(闭合)状态之间自动或半自动控制。在一些实施例中,控制单元可以包括各种互连的电子部件和气动部件,其操作以选择性地打开和关闭阀。例如,控制单元可以被配置为基于预定逻辑算法来操作阀,该预定逻辑算法基于但不限于一天中的设定时间、预定的定时间隔、用户激活或输入、一个或多个传感器的输出,该传感器被适配为感测生物反应器或其他器皿中或营养物容器内的营养液量的,或感测生长中的植物的特定参数(例如大小-高度或宽度)等。在一些实施例中,阀可能不存在。
在一些实施例中,生物反应器端口被形成在生物反应器的侧壁中。在一些实施例中,生物反应器端口被形成在生物反应器的侧壁的上部中。在一些实施例中,生物反应器端口被形成在生物反应器的侧壁的下部中。在一些实施例中,生物反应器端口被形成在生物反应器的基底或底板中。在一些实施例中,生物反应器端口被形成在生物反应器的顶壁中。在一些实施例中,生物反应器端口被形成在生物反应器的帽、封盖或盖中。
在一些实施例中,导管的第一端被可释放地连接到营养物容器的端口。在一些实施例中,导管的第一端被固定地连接到营养物容器的端口。
在一些实施例中,导管的第二端被可释放地连接到营养物容器的端口。在一些实施例中,导管的第二端被固定地连接到营养物容器的端口。
在一些实施例中,导管的第二端具有两个或更多末端连接器或具有两个或更多末端连接器的配件,从而促进与两个或更多生物反应器的连接,使得营养物供给能够基本上同时地供给至每个生物反应器。优选地,使用单独的营养物容器为每个生物反应器提供专用的营养物供给。
优选地,激活机构与营养物容器可操作地相关联,该激活机构被配置成在营养物供给被强制填充到容器中的作用位置和营养物供给被阻止流向容器的非作用位置之间运动。在一些实施例中,激活机构包括与导管或供应线流体连通的可选择性操作的营养物供应阀。
在一些实施例中,营养物容器是相对刚性的(例如,塑料瓶)。在这样的实施例中,激活机构可以是可移动地布置在容器内的活塞的形式,由此,活塞在第一方向上的运动导致至少一部分营养供给从容器流出,活塞在第二方向上的运动能够导致至少一部分营养物供给流入容器。优选地,活塞被配置成用于沿着营养物容器的纵向轴线选择性地滑动。
优选地,营养物容器是柔性的(例如,柔性的囊状物或袋),使得当向营养物容器施加压缩力时,至少一部分营养物供给经由其端口从营养物容器中排出,由此可以将其引导至生物反应器以促进其中的植物生长。压缩力可以被直接或间接地施加到营养物容器上。
在使用柔性营养物容器的一些实施例中,激活机构被适配为在其作用位置压缩或挤压柔性营养物容器或以其他方式(暂时地)使柔性营养物容器改变或变形,从而迫使营养物供给经由供应线从营养物容器流向该容器。在这样的实施例中,随着或当激活机构返回到其非作用位置时,激活机构脱开或至少部分地释放其与柔性营养物容器的接合,使得营养物供给自由地经由供应线返回至营养物容器。
在一些实施例中,例如单向阀或止回阀等防回流机构与导管或供应线相关联,以在激活机构处于其非作用位置时防止营养物供给的回流。在一些实施例中,当激活机构处于非作用位置时,营养物供给能够经由供应线从容器自由地排出,可选地返回到营养物容器(例如,在临时浸入配量方案中)或废弃。
优选地,营养物容器在使用中被布置成低于生物反应器所处的水平,从而使生物反应器内的至少一部分营养物供给能够在重力作用下优选经由相同导管返回到营养物容器中。
在其他实施例中,营养物容器可从第一位置和第二位置移动,生物反应器在第一位置时处于下方或至少位于生物反应器端口的下方,其中营养物供给能够从生物反应器自由流至营养物容器,在第二位置生物反应器位于上方或至少位于生物反应器端口的上方,其中营养物供给能够从营养物容器自由地流到生物反应器。在这样的实施例中,激活机构可以被适配为选择性地升高和降低营养物容器。例如,根据需要,激活机构可以包括线性致动器、机械臂或其他用于升高和降低营养物容器的定位机构。在一些实施例中,激活机构可以被配置为升高和降低两个或更多营养物容器。在其他形式中,激活机构可以被适配为相对于营养物容器选择性地升高或降低生物反应器或两个或更多生物反应器的组。在某些形式中,激活机构可以被适配为改变营养物容器和相关联的生物反应器两者的位置。
在一些实施例中,激活机构可以包括施力元件或施力机构。在一些实施例中,施力元件包括基本刚性的构件,该构件能够与营养物容器接触以向其施加压缩力。在一些实施例中,营养物容器被放置在基本刚性的表面上或紧靠其上,其中营养物容器位于激活机构的刚性表面和刚性构件之间,使得压缩力能够通过刚性构件相对于刚性表面的运动而施加到营养物容器上。
在一些实施例中,激活构件的施力元件或施力机构包括可在打开位置与闭合位置之间选择性地操作的抓器或钳口型装置,由此在朝着闭合位置运动时,抓器或钳口型装置向营养物容器施加压缩力,以使至少一部分营养物供给经由端口流出营养物容器。在一些实施例中,抓器可以包括一对铰接的钳口,钳口可在打开位置和闭合位置之间移动。
在一些实施例中,激活机构包括用于控制施力元件或施力机构的运动的致动器。致动器可以是线性致动器、机械臂等。
在一些实施例中,激活机构包括可膨胀元件,例如充气袋、囊状物或枕头。优选地,激活机构的可膨胀元件在使用中被布置成使得一旦膨胀(即,从放气的或部分放气/半放气的配置改变成膨胀的或更膨胀的配置),其抵靠营养物容器,从而将压缩力施加到营养物容器上,这会导致营养物容器的配置发生相应的变化,以使至少一部分营养物供给通过营养物容器的端口流出营养物容器。充气元件可以直接或间接地靠在营养物容器上以施加压缩力。
在一些实施例中,可膨胀元件被配置成抵靠单个营养物容器,从而独立地控制营养物进出相应营养物容器的流动。
在一些实施例中,可膨胀元件被配置成基本同时抵靠多个营养物容器,从而控制营养物供应流入和流出每个营养物容器的流动。这样的配置对于在采用多个生物反应器的系统中使用特别有利,在该系统中,在每个生物反应器中种植的植物相同的,在相同的发育阶段,和/或需要相同的配量方案。
在一些实施例中,激活机构的可膨胀元件包括用于可释放地接收至少一个营养物容器的至少一个接收构造。在一些实施例中,接收构造是袋。在一些实施例中,可膨胀元件包括两个或更多个口袋。在一些实施例中,每个口袋可以被配置成接收单个营养物容器。在一些实施例中,每个口袋可以被配置成接收两个或更多营养物容器。
在一些实施例中,一个或多个口袋可以被形成为激活机构的可膨胀囊状物的外部口袋。在一些实施例中,一个或多个口袋可以被形成为激活机构的可膨胀囊状物的内部口袋。
在一些实施例中,一个或多个口袋可以包括窗口,从而允许目视检查接收在其中的营养物容器。在一些实施例中,一个或多个口袋可以由透明(柔性)材料形成。
在一些实施例中,每个口袋具有单个开口,用于将营养物容器插入其中(和从中取出)。在一些实施例中,每个口袋在口袋的侧端或口袋的顶部边沿具有单个开口。在一些实施例中,每个口袋具有两个开口(例如,在两个侧端),用于将营养物容器插入其中(和从中取出)。使用两个开口能够有利于使用户在插入和取出营养物容器时用两只手操纵营养物容器和/或口袋。
在一些实施例中,该口袋或每个口袋被形成为垂下物,该垂下物沿着一个边沿(例如,下边沿)固定到囊状物(例如,囊状物的侧壁),并且可以沿着与囊状物(例如,囊状物的侧壁)相对的边沿(例如,上边沿)可释放地固定,其中相对的边沿能够被释放以允许营养物容器的插入和移除,以将营养物容器保持在袋内。在一些实施例中,可释放地固定的闭合机构被配置成便于口袋的打开和闭合。可释放地固定的闭合机构优选地与翼片的相对的自由边沿相关联。在一些实施例中,可释放地固定的闭合机构包括钩环紧固件(例如,
在一些实施例中,激活机构的可膨胀囊状物可连接至加压流体(空气或液体)供应器,由此加压流体供应器可选择性地操作以根据需要对可膨胀囊状物进行充气和放气。
在一些实施例中,系统被配置为根据预定的配量方案来输送营养物供给。在一些实施例中,该配量方案可以包括将单批或一定量的营养物供给递送至容器,由此在预定的时间间隔内,可选地,在整个生长期内,营养物供给与植物的一部分(例如,基部、根系或其他部分)保持接触。
在其他实施例中,配量方案可以是临时浸入方案,其中预定量的营养物供给在第一预定离散时间间隔内被重复地充入到容器中,并且随后在第二预定离散时间段内从容器中排出,由此营养物供给向容器的填充和从容器的排出发生了预定的循环次数和/或预定的持续时间。在一些实施例中,第一预定离散时间间隔小于第二预定离散时间间隔。例如,营养物供给可以被提供至生物反应器并且在其中每24小时保持约15分钟、30分钟、45分钟或60分钟的时间。这样的实施例能够对提高植物的生长速率,降低污染的风险以及减少在整个生长期所需的营养物的量有用。在一些实施例中,第一预定离散时间间隔大于第二预定离散时间间隔。在一些实施例中,第一预定离散时间间隔等于第二预定离散时间间隔。
在一些实施例中,提供了壳体用于可释放地收容一个或多个营养物容器。在一些实施例中,壳体包括多个分立的腔室,一个或多个营养物容器能够被接收在其中。优选地,每个腔室的大小被设计成接收单个营养物容器。在一些实施例中,壳体包括大体上细长的矩形棱柱体,其具有被布置成形成各个腔室的多个分隔器。优选地,壳体的主体是开放的顶部结构,其具有底板、侧壁和端壁。
优选地,壳体是可弹性变形的,使得在使用中,激活机构可以被适配为可释放地使壳体变形或挤压壳体,从而引起相应的压缩力或挤压力被施加到壳体内的每个营养物容器上,以引起每个营养物容器的营养物供给将经由各端口排出。
在一些实施例中,直接或间接地向营养物容器施加压缩力的大小、速率和/或持续时间是可控制的,使得去往和来自营养物供给的营养物供给的流量能够反过来同样受到控制。在一些实施例中,填充流量可以与排放流量不同。在一些实施例中,填充流量和排放流量可以基本上相同。
根据本发明的另一方面,提供了一种植物繁殖系统,包括:
其具有用于接收生长中的植物的至少一个植物接收开口的托盘;和
被适配为在植物中制造至少一个垂直的切口的切割元件,从而将植物分成两个或更多植物部分。
本公开的这个方面特别适合于和有利于用于无茎(簇生的或莲座丛的)植物。如所预见的那样,无茎植物应被理解为包括典型地在地面或土壤水平以上具有很少或没有茎的植物。因此,切割元件优选地被配置成使其能够沿着竖直轴线(向下)进行切割动作。
优选地,切割元件被配置为均匀地切割或分割每株植物,由此每个被切下的植物部分具有基本相同的大小。优选地,切割元件被构造成在使用中切穿托盘中各开口的中心点,从而有助于将植物切割成相等大小的被切下的植物部分。在一些实施例中,切割元件被适配为将每株植物切割成预定数量的较小植物部分;例如,但不限于两个部分,三个部分,四个部分,五个部分,六个部分,七个部分或八个部分。在一些实施例中,切割元件被适配为将每株植物切成两半,从而产生基本上相同大小的两个植物部分。在各种实施例中,优选使用切割元件将每株植物分成四个基本上相等大小的部分,或者换句话说,将每株植物四等分。
在一些实施例中,切割元件被适配为在单个切割动作中将每株植物分割成预定的较小植物部分。在一些实施例中,切割元件被适配为用两个或更多切割动作、行程或通过路径将每株植物分割成预定的较小植物部分。例如,根据切割元件的形状和配置,切割元件可以被用于在第一切割动作下将植物切割或分成两半。在第一切割动作之后,在这个示例中,刀片可以相对于托盘旋转预定的程度或角度(例如,90度),使得切割元件能够进行第二切割动作以进一步分割植物(例如,将被第一切割动作形成的半株植物部分中的每份切割成四分之一植物部分)。在一些实施例中,托盘可以相对于刀片移动(例如,旋转),以便相对于托盘/植物定位刀片用于第二切割动作。在一些实施例中,在第一切割动作之后,刀片和托盘都相对于彼此移动,从而将刀片定位用于第二切割动作。
在一些实施例中,切割元件包括刀片。在一些实施例中,刀片具有单个切割刃。在一些实施例中,切割元件包括多个刀片元件,其中每个刀片元件被适配为装配在托盘的各开口内,用于切割位于其中的各植物。在一些实施例中,切割刃可以包括斜面或倒角,从而在切削强度(例如,切削较厚和/或较硬的植物)和/或粗略切割/精准度(例如,精细至粗略切割)方面增强其切割能力。在一些实施例中,切割刃可以是直边的、锯齿状的、有锯齿的等。在一些实施例中,在整个切割动作中,切削刃可以被适配为切割各植物或植物部分,其切削刃大体上平行于托盘或植物在其中生长的介质的表面布置。
例如,在托盘被大体上水平地布置的情况下,切削刃可以基本平行于托盘的上表面,并且使得切削刃类似地水平地布置。在这样的布置中,可以通过将切割元件朝向托盘向下移动直到其接合植物来实现切割元件的切割动作,由此切割元件的进一步向下移动导致切割元件将植物切割或分割成较小的子植物部分。在其他实施例中,托盘可以是可移动的,从而将其定位并且因此将植物相对于切割元件定位在期望的位置。
在一些实施例中,切割元件可以被配置成使得其相对于托盘成角度,使得在切割动作期间,切削刃逐步地接合植物,从而将植物切割或分割成较小的植物部分。
在一些实施例中,切削刃被成形为在单个切割动作中将植物切成预定的三个或更多子植物部分。
例如,切割元件可以大体上为Y形,从而将植物切割或分割成三个植物部分。在这样的实施例中,Y形刀片的各臂之间的角度基本相等(例如,每对臂之间约120度),从而有利于切割植物以形成三个基本上相等大小的植物部分。
在其他实施例中,切割元件可以大体上为t形或加号形或V形,从而将植物切割或分割成四个植物部分。在这样的实施例中,t形或V形刀片的各臂之间的角度基本相等(例如,每对臂之间约90度),从而有利于切割植物以形成四个基本上相等大小的植物部分。在其他形式中,单个切割刀片可以被用于形成四个单独的切口,以便将植物切割或分割成四个四分之一植物部分。例如,第一切口在12点钟位置,第二切口在3点钟位置,第三切口在6点钟位置,第四切口在9点钟位置。
将理解的是,切割元件不限于具有根据仅作为示例提供的上述非限制性示例性形状成形的切割刀片。而是,切割元件可以被配置为切割或分割植物以形成具有预定形状和/或大小的植物部分,包括经由单个切割动作而具有不同大小和/或形状的植物部分。
在一些实施例中,切割元件包括远离刀片延伸的手柄部分,从而有利于切割元件的手动操作以及对托盘内种植的植物的手动切割。在一些实施例中,切割元件被适配为附接到选择性地可操作的致动器,从而促进自动和半自动的切割过程。
在一些实施例中,致动器被适配为促进切割元件朝向托盘和远离托盘的运动,从而生产切割动作,以切割或分割在托盘内种植的各植物。在一些实施例中,致动器是线性致动器,其被配置为引起切割元件的相应线性运动(例如,向上运动和向下运动)。在一些实施例中,致动器可以包括用于引起切割元件的线性位置运动的第一致动器和用于引起切割元件的旋转位置运动的第二致动器,从而有利于切割元件相对于托盘的定位和对齐,并且因此有利于切割元件相对于在其中种植的各株植物的定位和对齐。在一些实施例中,切割元件可以形成机械臂的末端执行器,由此机械臂被配置为控制切割元件的运动并且因此控制相关联的切割动作,包括例如切割速度、频率、定时等。
优选地,托盘包括多个植物接收开口。在一些实施例中,每个托盘具有预定的轮廓或形状。在一些实施例中,每个托盘通常是矩形、正方形、三角形、圆形、六边形或其他合适的多边形形状。优选地,每个托盘具有大体均匀的厚度或高度。
每个开口优选地被配置为适合于打算在其中种植的特定植物类型或大小。在一些实施例中,每个植物接收开口具有相同的形状或配置。在一些实施例中,每个植物接收开口具有相同的大小。在一些实施例中,每个托盘可以包括不同大小的植物接收开口。在一些实施例中,每个开口是矩形、正方形、三角形、圆形、六边形或其他合适的多边形形状。
例如,托盘可以具有第一组的具有第一配置的植物接收开口(两个或更多),以及第二组的具有第二配置的植物接收开口(两个或更多),其中,第一配置的植物接收开口与第二配置不同。在一些实施例中,第一组的开口可以具有与第二组的开口相同的形状,但是具有不同的大小。
在一些实施例中,每个植物接收开口是贯通开口。在一些实施例中,每个植物接收开口是开放顶式开口或腔。每个开放顶式开口或腔优选地具有底板。优选地,底板上穿孔有一个或多个开口,从而有助于将营养物供给进给到在各开口内种植的植物的根系。在一些实施例中,每个开口的底板可以由单独的底板块限定,该单独的底板块延伸越过或邻近每个相应的植物接收开口的底部或下端。在一些实施例中,单个底板块可以在托盘的下表面上延伸,从而限定每个植物接收开口的底板部分。
优选地,每个植物接收开口被适配为用于接收单株植物,更优选地是一种无茎类型的植物。
在一些实施例中,多个植物接收开口被布置成规则的阵列(例如,正方形或矩形阵列),优选地在开口之间具有规则/均匀的间隔。在一些实施例中,每个托盘中的开口以环形阵列进行布置。在一些实施例中,该多个植物接收开口以不规则阵列进行布置。例如,开口可以被布置为形成偏距阵列,其中交替的行以预定的程度(例如,开口大小的50%)错列,从而使得能够减小相邻开口之间的间距,并且因此每块板还提供额外的开口。
优选地,每个托盘被配置成使得其能够被接收在植物生成器皿或生物反应器中。优选地,每个托盘被配置为使得其可以自由地搁置在生物反应器的基部上,从而在使用中便于植物的经由液体营养物供给的供养集中在生物反应器的基部上。
在一些实施例中,每个植物接收开口的底板作用或抵靠各植物的下侧,从而在切割动作期间限制植物的运动。在其他实施例中,生物反应器的基部靠在各植物的下侧,从而在切割动作期间限制植物的运动。
在一些实施例中,单个切割元件被用于切割在托盘内种植的每株植物。例如,切割元件可以被用来根据预定程序(例如,依次横越第一行,然后第二行等等)在托盘的每个开口中执行切割动作。在一些实施例中,切割元件被用于通过参考每株植物的预定生长期或每株植物的发育阶段(例如大小或形状)来对植物执行切割动作。
在一些实施例中,切割元件可以被适配为在单个切割操作期间切割多株植物。在一些实施例中,切割元件可以包括以相对间隔的关系布置的多个刀片,其中刀片之间的间隔对应于托盘中的所期望同时切割的开口之间的间隔。例如,刀片可以间隔开,使得托盘的第一行中的每株植物被同时切割。在其他形式中,两个刀片被用于同时切割两株植物。在一些实施例中,刀片可以间隔开以便在托盘的一行的每个第二开口、第三开口、第四开口或第五开口中或在托盘的不同行上切割植物。在一些实施例中,切割元件可以被适配为同时切割在托盘的植物接收构造内种植的每株植物。
在一些实施例中,每个托盘具有封盖。优选地,每个封盖可释放地安装在相应的托盘上,优选地可安装在托盘的上表面上。在一些实施例中,封盖被安装到托盘上以约束或限制每株植物能够生长的高度。在一些实施例中,封盖具有一个或多个开口,各株植物的一个或多个新枝可以通过该开口生长。在一些实施例中,封盖被适配为在从托盘上移除封盖时切割或修剪植物,使得每株修剪过的植物具有基本相同的高度。例如,封盖可以可滑动地安装到托盘,由此在滑动动作以从托盘上移除封盖时,托盘剪切植物以修剪伸出到封盖的高度上方的新枝。
在一些实施例中,多株无茎(簇生)植物能够被布置于生物反应器内的第一托盘中并且在其中种植,其中第二托盘能够被放置或堆叠在第一托盘上,以使得侧向切割元件能够在第一托盘和第二托盘之间通过,从而切开叶子,并且因此修剪无茎植物的高度。优选地,叶片的侧向切割在进行垂直切割动作之前进行,以将无茎植物分裂或分割成相应的植物部分。
优选地,该系统包括多个托盘,其中第一托盘能够被用于种植第一批植物,第二托盘能够被用于种植从第一批植物切下的植物部分的第二批植物。第三托盘和其他托盘能够被用于从切下的植物部分中生长另外的批次。这个过程能够被重复以继续生长周期。
在一些实施例中,在将切下的植物部分从腔/托盘移除的同时,在切割动作结束时,将切割元件保持在相应的植物接收开口内的适当位置。通过在移除切下的植物部分的过程中将切割元件保持在这个位置,减少了在提取过程中无意地移除被切割植物部分中的另一个风险。
在一些实施例中,切下的植物部分的摘取是手动操作,可选地用手或借助于专用的植物抓握机构来执行。在一些实施例中,抓握机构可以被附接到致动器,例如线性致动器、旋转致动器或机械臂,以帮助从托盘上自动或半自动地移除切下的植物部分并且随后转移至另一个托盘以重新开始生长过程。
在一些实施例中,抓握机构可以是夹具、镊子、拔钉钳、扎线钳等的形式。这种抓握机构优选地包括一对相互对置的夹持臂,其相互偏置远离至打开位置,其中,在使用中,施加到夹持臂的选择性闭合力使臂相对于彼此移动以闭合臂之间的开口,从而抓握切下的植物部分。
在一些实施例中,抓握机构包括用于抓握、提升和移动切下的植物部分的抽吸或真空装置。这样的抓握机构可以包括空心管,该空心管可选地具有装配到一端(例如,自由端)的吸盘。优选地,可选择性地操作的空气供应器被连接到中空管的另一端,该空气供应器被配置成在管内产生负压以提升切下的植物部分。在一些实施例中,关闭负压以释放切下的植物部分以放置在期望的位置(例如,另一个托盘)中。在一些实施例中,空气供应器可选择性地操作以在中空管内产生正压,以帮助将切下的植物部分从管的自由端释放,以放置在期望的位置。在某些实施例中,抽吸或真空抓握机构可以包括用于在负压下抓握切下的植物部分的第一管,以及用于在正压下(例如,一股空气)从管上释放切下的植物部分的第二管。
优选地,当无茎植物通过垂直切割被分成较小的植物部分时,至少一个植物部分留在其中种植有植物的托盘的相应开口内,从而能够将托盘返回至生物反应器以重新开始留存的植物部分的生长周期,而其他部分则被提取并放置在另一个托盘中,以提供一批新的植物部分进行生长周期。
根据本发明的另一方面,提供了一种植物繁殖系统,包括:
用于接收至少一株正在生长的植物的主体;和
被适配为在植物中进行至少一个垂直切割的切割元件,从而将植物分成两个或更多植物部分,使得每个植物部分能够被重新种植或重新定位(例如,在另一个托盘中)以进一步生长。
根据本发明的另一方面,提供了一种繁殖植物的方法,该方法包括以下步骤:
提供至少一个植物接收开口;
将植物置于该植物接收开口或每个植物的接收开口中,该植物处于发育的第一预定阶段;
据预定的供养程序为植物提供营养物供给;和
一旦植物到达发育的第二预定阶段,就沿着大体上垂直的轴线切割植物,从而将植物分成两个或更多植物部分,使得每个植物部分能够被重新种植或重新定位(例如,在另一个托盘中)以进一步生长。
附图说明
现在将仅通过示例的方式,参考附图来描述本公开的实施例,在附图中:
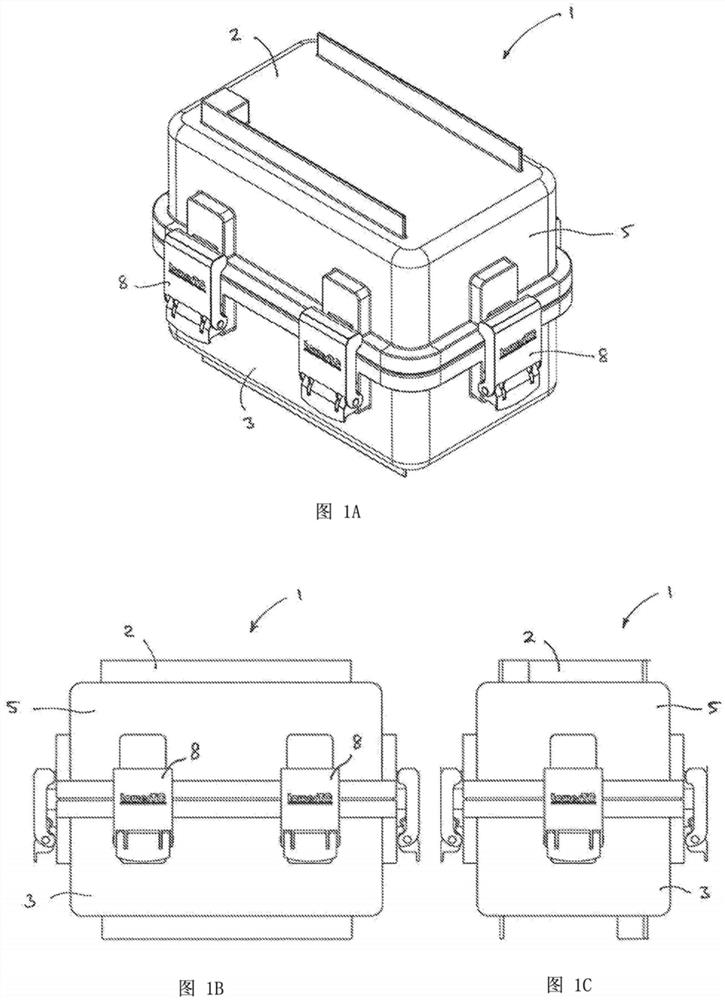
图1A至图1C分别示出了根据本公开的生物反应器的实施例的透视图、前视图和行驶侧视图,其中盖处于闭合位置;
图2A至图2C分别示出了图1的生物反应器的基部的透视图、前视图和行驶侧视图;
图3A和图3B示出了用于以相对间隔关系保持和种植多株植物的可堆叠托盘的实施例的透视图和右侧视图;
图4示出了具有嵌套在其中的托盘的堆叠的生物反应器的一个实施例的示意性侧视图;
图5示出了生物反应器的实施例的顶视图,其示出了可堆叠的植物生长托盘内的开口的各种示例性形状、配置和布局;
图6示出了在切割操作期间用于支撑托盘的堆叠的托架的实施例的透视图;
图7示出了用于可释放地保持和操纵切割/分隔板的手动工具的实施例的透视图;
图8示出了用于可释放地存储准备好使用的多个切割/分隔板的托架的实施例的透视图;
图9A和图9B示出了切割/分隔板的实施例的前边沿的透视图和放大的细节图,该切割/分隔板用于将托盘的堆叠分成较小的子堆叠,并且在插入一对托盘之间时切割植物;
图10A和图10B分别示出了用于提升和运载托盘的堆叠或托盘的子堆叠的载体的透视图和前视图;
图11示出了结合有用于向生物反应器供应液体营养物供给的柔性营养物供给容器的介质输送系统的实施例;
图12示出了结合有用于向多个生物反应器供应液态营养物的多个柔性营养物供给容器的介质输送系统的示例性布置;
图13A、图13B和图13C分别示出了根据本公开的介质输送系统的另一实施例的示意图的第一状态,其中液体营养物供给被填充到生物反应器中;第二状态,其中液体营养物供给被填充到生物反应器;第三状态,其中液态营养物供给已准备好填充到生物反应器中;
图14是表示通过托盘的堆叠种植植物、切割植物和分割该堆叠以及在每个托盘保持着已被切割的植物的情况下重复该过程的过程概述的流程图;
图15示出了根据本公开的植物繁殖的托盘的实施例的示意图,其中多株植物在各自的植物接收开口中生长;
图16示出了代表性的切割线,沿着该切割线切割在图1的托盘中种植的每株植物,以产生基本上相同大小的四个切开的植物部分;和
图17示出了将每个切下的植物部分转移到另一个托盘以重新开始生长过程的过程示意图。
具体实施方式
参照附图并且首先参照图1A-C,示出了用于种植植物组织培养物的植物繁殖系统1的实施例。
系统1包括生物反应器2形式的容器,用于种植植物组织培养物。如图1A和图2C清楚所示,生物反应器2的基部3具有开放的顶部4。盖部5可释放地围绕基部3的开放顶部4附接,从而关闭生物反应器,从而为在其中种植植物提供合适的无菌环境。优选地,盖部5围绕其开放顶部4密封地接合基部3。
为了增强基部3和盖部5之间的密封,呈连续不间断的弹性可压缩密封元件(未示出)形式的密封元件被适配为位于盖部5和基部3的开放顶部4的外围边沿6之间。基部3和/或盖部5优选地包括围绕其开口的外围延伸的通道7,其中通道7被适配为在其中接收密封元件。图2A中示出了形成在基部3中的这种通道7的示例性形式。
生物反应器容器2包括可释放的锁定机构,用于以封闭的密封配置将盖部5牢固地锁定到基部3,如图1所示。在所示的实施例中,锁定机构为六个可手动操作的闩锁8的形式,该闩锁被配置为将生物反应器2的盖部和基部(3、5)朝向彼此正向拉动,从而有助于压缩其间的密封元件。应当理解,可以使用任何数量的闩锁8来将基部3和盖部5彼此固定。
现在参照图3和图4,基部3被配置成用于可释放地接收保持器,该保持器以相对间隔的关系保持至少两株植物。在图3的示例性形式中,保持器呈大体矩形的托盘9的形式,该托盘具有以预定的有序图案布置的多个开口10。与典型地将植物以在生物反应器的基部的区域内随机间隔布置的方式放置并种植的现有的植物组织培养系统相比,这是一个特别的优势。
在图3A的示例性形式中,每个开口10是六边形的形状。应当领会,使用这种六角形开口10能够使开口彼此相对紧密地布置,并且连续的行以预定程度重叠。开口10的这种紧密配合的布置因此使得能够在托盘9中形成更多数量的开口10,从而提高经由植物繁殖系统1繁殖植物组织培养物的总效率。有利地,每个开口10专用于接收单株植物的一部分。
将理解的是,开口10不限于所示的六边形形状,而是开口可以是任何合适的形状,包括但不限于圆形、椭圆形、正方形、矩形、三角形和其他多边形形状。
为了进一步提高植物繁殖系统1的效率,并且如图4所示,在一些示例中,可能期望提供并配置多个托盘9以使其可堆叠。图4示出了被放置在生物反应器2内的托盘9的塔或堆叠的示意表示。
每个托盘9优选地具有相同或相似的形状和/或配置。应当领会的是,在竖直塔或堆叠中布置两个或更多类似配置的托盘的能力有利地允许相应的开口24对齐,使得能够形成或构造适合于特定植物类型的预定高度的多个贯通通路,从而使植物能够通过每个通路向上生长。
托盘9的堆叠具有提高操作效率的多个优点,包括在每株植物的生长期随着其高度增加而为其提供支撑,以及在大体上垂直的方向上向上引导每株植物。
托盘9的堆叠的使用还使植物能够生长到更高的高度,使得可以对每株植物的茎进行多次切割,从而显著增加能够从单批生物反应器生产的植物的数量。例如,在四个托盘的堆叠中,其中每个托盘9具有五十个开口,如果在中间的两个托盘9之间进行切割,则将提供两批植物,每批具有五十个插枝,因此总共有100个插枝。例如,如果将堆叠增加到六个托盘,并且在每隔一个托盘之间进行切割,则这将产生三批五十个插枝,因此总共有150个插枝。因此,应当理解,植物繁殖系统1的总效率与每个托盘9的开口数和每株植物可切割的数目两者之间存在相关性。
仅以示例的方式提供了上述装置,以说明证明能够从植物繁殖系统1获得的操作效率。在实践中,至少最下面的托盘9可以被用于朝着生物反应器2的基部3的底板支撑植物的根系,因此不可以用于所产生的插枝的再生长;这是为堆叠内的上部托盘保留的。还应当理解,子堆叠不旨在限于如上所述的成对的托盘9,而是可以选择任何合适数量的托盘,以为子堆叠提供基本上与待生产的插枝的期望高度相对应的高度。例如,子堆叠可以包括三个、四个、五个、六个、七个、八个、九个、十个或更多托盘。因此,根据需要,托盘的堆叠可以包括偶数个托盘9或奇数个托盘9。
因此,将领会到,本系统提供的切割作用特别适合于树状植物并相对于树状植物提供了优势。这种植物被称为树木状植物,通常具有单个茎或主干。
应当领会,以有序间隔的阵列种植多株植物的能力以及使得每株植物的高度在生长期间基本相同的能力,有利地使得能够在单次通过时对保持器内的每株植物执行每个切割操作。通过单次通过切割多株植物的能力所能实现的效率远远超过了一次切割单株植物的系统或缺乏该系统的效率。
每个托盘9优选地至少在其中形成开口10的主(或中心)区域上具有均匀的厚度。在图3B中最佳地示出的所示实施例中,每个托盘9包括厚度减小的一个或多个端部突出部11,从而有利于从堆叠的托盘中选择和移除期望的托盘或托盘的子集和/或在成对的托盘9之间提供导入开口,以有利于在托盘的堆叠内的相邻托盘之间执行切割操作。
就这一点而言,优选的是,不在托盘9上形成定位元件,使得在相邻的托盘9之间没有障碍物延伸,从而使得能够在一对相邻的托盘9之间自由地进行切割操作。而是,生物反应器2或更具体地生物反应器1的基部3被配置为定位和支撑对齐的托盘9或托盘9的堆叠。在一些形式中,基部3的侧壁可以用来为托盘9的堆叠提供必要的支撑。在其他形式中,可以在基部3的底板上形成一个或多个定位元件,例如凸起的肋或凸耳,以至少支撑和定位堆叠的最低的托盘9。
参照图7和图9,提供了专用手持切割工具12形式的切割机构,用于分割托盘的堆叠并且手动切割其中种植的植物。切割工具12包括在其近端的手柄部分14和在其远端的刀片保持器13。刀片保持器13被适配为可释放地抓握和保持以板或刀片26的形式切割元件(图9),使得刀片26大体上远离手柄部分14延伸以供使用。刀片保持器13能够被选择性地释放以移除刀片26以进行清洁和存储。
在所示的实施例中,切割元件为扁平刀片26的形式(图9),由此刀片能够装配在一对相邻的堆叠托盘9之间,以分割托盘的堆叠并且切割在托盘9内种植的每株植物。在这种形式中,叶片26由相对薄的板状材料例如金属或塑料形成。
刀片26的相对较薄的轮廓使得它能够通过推动或滑动运动而插入到一对相邻堆叠的托盘9之间。如在图9B中最清楚地示出的,刀片26的前边沿是逐渐变细的以提供导入,从而有利于刀片26在一对堆叠的托盘9之间的插入。有利地,该导入能够在刀片26被插入在各对托盘9之间时,使刀片26从大体上横向于或正交于每株植物的茎的纵轴的方向切割每株植物。即,刀片26被配置成轴向或侧向切割每株植物的茎。在使用中,刀片能够被定位和操纵以在一对托盘之间滑动,该一对托盘从堆叠的前部开始逐渐向堆叠垛的后部移动。以此方式,刀片将基本上同时切割第一排或最前排中的每株植物,这是因为植物在相应的开口10内对齐,然后是第二排,依此类推,直到最后一排内的植物被切割为止。一旦刀片26已经完全插入并且所有植物都被切割,刀片26的板状结构能够用于支撑和提升位于刀片26上方的托盘9的子堆叠。
在其他形式中而不是使用刀片,切割机构可以包括热切割装置(未示出),例如激光系统或被适配于使激光束在相邻托盘之间通过的装置,或被适配为使流体(例如,水)流在相邻的托盘之间通过的高压喷嘴(未示出),或者其他合适的切割机构,例如细金属丝元件,以在保持器上单次通过对植物进行切割操作。以这种形式,切割机构和分割板/支撑板被形成为单独的元件或装置。
切割操作优选地在生物反应器2的外部进行。也就是说,一旦植物达到了生物反应器内的期望的生长参数,例如期望的高度和/或设定的时间段,则在一些示例中,首先在执行切割操作之前从生物反应器2中移出托盘9的堆叠。
为了帮助将托盘9的堆叠与植物一起从生物反应器2的基部3中提起,提供了用于无菌搬运托盘或托盘9的堆叠的载体15。图10示出了载体15的示例性实施例。载体15优选地被配置成使得其能够被用于从子堆叠中的一个托盘、两个或更多托盘或整个托盘堆叠中运载期望数量的板。
在所示的实施例中,载体15包括手柄16和从手柄16延伸的一对间隔开的臂17。臂17被适配为接合相关联的托盘9的各侧边沿部分,由此一旦托盘被抓握时,则经由手柄16对载体15的手动操作引起被抓握的托盘9(以及位于被抓握的托盘上方的任何托盘)的相应运动,以根据需要进行定位(例如,用于从生物反应器2中无菌移除托盘9)。优选地,臂17从手柄16向下延伸,从而在使用中使臂能够从上方延伸到生物反应器2的基部3中,然后接合托盘9的堆叠。
如图10B所示,每个臂17具有与各臂17的远端相关联的呈横向延伸的轨道18形式的托盘接合构造,从而有助于牢固地接合或抓紧托盘9的各侧边沿部分。每个托盘9的侧边沿部分可以具有接收构造,例如倒角、切口或凹部,其中轨道18被适配为被可释放地接合在其中或以其他方式接合。
在所示的实施例中,该对臂17朝向彼此偏置,从而促进与托盘或托盘的堆叠的接合。以两个手指可激活触发器19形式的操作构件与每个臂17可操作地相关联。触发器19与臂17可操作地相关联并且被布置成使得它们能够通过使用者的手指压力而被压入手柄16中,由此触发器19的操作使得臂17(并且因此使轨道18)在偏置机构的作用下彼此远离。这有助于加宽臂17和轨道18之间的间隙,使得它们能够越过托盘9的堆叠。随后释放触发器19上的手指压力,并且通过偏置机构的作用(例如张紧的螺旋弹簧)使臂17和轨道18向内朝彼此相对移动,从而接合相应的托盘9。
参照图6,提供了用于在从生物反应器2中移除时将堆叠的托盘保持相对对齐的托架20,由此由各托盘9的对齐的开口10形成的通路被保持在打开位置。
在所示的实施例中,托架20包括底板部分21和从底板部分21向上延伸的一对侧边沿部分22,使得能够将托盘9的堆叠接收在其间。侧边沿部分22以预定的距离被间隔开,使得托盘9的堆叠被紧密地接收在其间,从而限制托盘9在托架20内的横向运动并且保持其对齐。
在一些实施例中,托架20包括止挡件23,托盘9的堆叠能够抵靠在其上,从而限制托盘相对于托架20的底板部分21向后移动的程度。如图所示,止挡件23包括从每个侧边沿部分横向地延伸的凸缘24,该凸缘24向内朝着托架20的中心线延伸。
托架20的底板部分21的前边沿向下折叠以形成升高构件,用于使底板部分的前边沿相对于其后边沿升高,使得在使用中,底板部分从前向后向下倾斜,由此托盘9的堆叠倾向于通过滑动运动将自身定位在止挡件上。
托架20的底板部分21包括呈一对凸起的细长轨道25形式的减摩元件,用于减小托盘9的堆叠与底板部分21之间的摩擦。这使托盘9的堆叠容易在底板部分21上相对平移滑动,从而在将托盘9移入或移出托架20时帮助保持托盘9的堆叠对齐。
参照图9,刀片26还可以起分隔板26的作用,其被提供来用于在切割操作之后将托盘9的堆叠分成较小的子堆叠。如前述,分隔板被形成为穿孔的薄板结构,使得其能够在一对相邻的垂直堆叠的托盘9之间滑动,从而将相邻的一对托盘9分开并且形成平台以帮助将托盘的子堆叠从初始堆叠上提起。在某些形式中,分隔板26还可以用于帮助将与根系相关联的最下面的一个或多个托盘与紧邻其上方的容纳健康插枝的托盘分开。
参照图4,生物反应器2具有至少一个专用营养物供给口28,其朝向容器的下部区域布置,通过该专用营养物供给口28,可以选择性地将液体营养物供给填充入生物反应器2或从生物反应器2中排出,从而促进植物的生长。在图4中,生物反应器2还具有朝向容器的上部区域布置的排气口27,以用于向容器摄入和从容器排出空气,从而调节容器内的压力。即,当液体营养物供给被填充到容器中时,排气口27允许空气从容器中排出,从而防止生物反应器内的加压气氛。类似地,当液体营养物供给从容器中排出时,排气口27允许空气进入容器中,从而防止在容器内发生真空压力,从而还确保液体介质在重力作用下从容器中自由地排出或流出到培养基容器,该培养基容器被适配为保持液体营养物供给的储存器。
生物反应器2被配置成使得当端口28关闭时,营养物供给集中在基部3的底板上,使得其能够与植物的根系接触。
现在参考图11和图12,示出了介质输送系统30的实施例。该系统被适配为经由营养物供给端口28可流体地连接至生物反应器2,以选择性地将液体营养物供给供应至基部3的内部。介质输送系统可以被配置为重力进给系统。然而,在所示的实施例中,介质输送系统30被配置为压力进给系统。
介质输送系统30能够有利地被配置为用于在用于种植各种植物类型的系统中使用。例如,系统30能够用于在预定的配量方案下输送营养物供给2,以积极地促进各种类型的植物的生长,包括但不限于树状植物和无茎植物。系统30特别有利于用于向植物组织培养(PTC)中种植的植物输送液体营养物供给2。以可流动状态或液体状态使用的营养物供给2是有利的,以为它能够被容易地控制来根据需要朝向和远离营养物容器流动。
因此,将参考在PTC应用中的使用,仅通过示例来描述系统30。然而,系统30具有广泛应用的潜力,并且能够容易地被适配为用于种植植物的多种其他系统、工艺和装置,包括例如温室和室外环境,或用于非植物应用的液体剂量要求。如以下更详细描述的,系统30有利地在定制用于给植物进给液体营养物供给2的预定的或期望的配量方案方面提供显着的灵活性。特别地,系统1能够有利地用于开发临时浸入方案。
介质输送系统30有利地包括呈柔性囊状物或袋31的形式的营养物容器,用于容纳预定量的营养物供给或营养物供给的一种或多种成分。柔性囊状物3可选择性地变形,使得当压缩力被施加给囊状物3时,营养物供给2的至少一部分经由端口4从囊状物中排出。以此方式,液体营养物供给2能够被导向生物反应器5以促进其中植物的生长。
供应线32可优选地经由营养物供给端口28连接在生物反应器2和营养物袋31之间,使得营养物供给能够被填充到生物反应器2和/或从生物反应器2中排出,从而有助于预定的配量方案的流动,以促进生物反应器2内植物的生长。
如图11所示,呈可选择性膨胀的囊状物形式的激活机构33与营养物袋31可操作地相关联。激活机构33被配置为在其中营养物供给被强制充入生物反应器2的作用位置(如图11中的虚线所示)和防止营养物供给流向生物反应器2的非作用位置(如图11中的实线所示)之间移动。在一些配置中,当激活机构33处于非作用位置时,营养物供给由供应线32从生物反应器2自由地排出返回到营养物袋31中。这样的配置对于采用临时浸入剂量方案是特别有利的,由此能够优选地以预定的时间间隔将营养物供给重复地充入生物反应器2和从生物反应器2中排出。
通过使用柔性营养物袋31,激活机构33能够已经被适配为在其作用位置时压缩或挤压柔性营养物袋31,从而迫使营养物供给经由供应线32从营养物袋流向生物反应器2。在这样的实施例中,当激活机构返回到其非作用位置时,激活机构脱开或至少部分地释放其与柔性营养物袋31的接合,使得营养物供给可自由地经由供应线32返回至营养物容器。
临时浸入方案可以配置为,使得预定量的营养物供给在第一预定离散时间间隔内被重复地填充到容器中,并且随后在第二预定离散时间段内从容器中排出,由此营养物供给向容器的填充和从容器的排出发生了预定的循环次数和/或预定的持续时间。
现在参考图13A-C,示出了介质输送系统30的另一个实施例。在这个实施例中,柔性袋300具有一个流动端口400,营养物供给200能够根据期望的配量方案通过该流动端口400流入或流出柔性袋300。以一段中空柱形管600的形式提供导管或供应线以在柔性袋300和要在其中种植植物的生物反应器500之间引导液体营养物供给200的流动。导管600在其第一端700可连接到柔性袋300的端口400,并且在其第二端800可连接到与生物反应器500相关联的端口900,使得营养物供给200能够被填充到生物反应器500和/或从生物反应器500中排出,从而有助于预定的配量方案以促进生物反应器500内植物的生长。
在所示的实施例中,端口900被形成在生物反应器500的基底或底板1000中。这使得被填充到生物反应器500中的液体介质供给200′的量能够在底板1000上积聚或集中到预定深度,使得它能够容易地(直接或间接地)接触各株植物的根系,以便向其提供营养物,从而促进植物生长。
在所示的实施例中,为了便于控制进出柔性袋300的液体营养物供给200的流动,系统100包括与柔性袋300可操作地相关联的激活机构1100,由此激活机构1100的操作引起营养物供给200的至少一部分从柔性袋300流到生物反应器500,反之亦然。
激活机构1100被配置为在其中营养物供给200被强制充入生物反应器500作用位置(图13A)和营养物供给200不能流向生物反应器500的非作用位置之间移动。为了提供对激活机构1100的操作的控制,布置了可选择性操作的营养物供应阀(未示出),以便于与导管或供应线600流体连通。
激活机构1100可以包括用于将压缩力施加到柔性袋300的施力元件或施力机构。在所示的实施例中,激活机构包括选择性可膨胀元件或囊状物1200。可膨胀元件1200在使用中被布置成使得一旦膨胀(即,从放气的或部分放气/半放气的配置改变成膨胀的或更膨胀的配置),其抵靠持有营养物供给200的柔性袋300,从而将压缩力施加到袋300,这会导致营养物供给200的至少一部分经由导管600从袋300流出到生物反应器500。
在所示实施例中,激活机构1100的可膨胀囊状物1200包括用于可释放地接收至少一个营养物袋300的呈口袋1300形式的至少一个接收构造。在某些实施例中,口袋1300能够采取多种形式,并且可以例如被配置为接收两个或更多袋300。
在一些实施例中,可膨胀囊状物1200可以包括多个口袋1300,该多个口袋1300可以被形成为激活机构的可膨胀囊状物的外部口袋。在一些实施例中,一个或多个口袋可以被形成为激活机构的可膨胀囊状物的内部口袋。
优选地,该口袋1300或每个口袋1300可以包括窗口,从而允许目视检查接收在其中的柔性袋300。同样地,柔性袋300可以由透明材料形成,以允许目视检查其中的营养物供给200。
使用中,激活机构1100的可膨胀囊状物1200可连接至加压流体(空气或液体)供应器,由此加压流体供应器可选择性地操作以根据需要对可膨胀囊状物进行充气和放气。如图13A所示,在可膨胀囊状物1200充气时,可膨胀囊状物1200向袋300施加压缩力。这个压缩力使袋300寸减小尺,从而使液体营养物供给200从袋300中排出。
一旦期望量的液体营养物供给200从柔性袋300转移到生物反应器500,就关闭导管阀以将排出的营养物供给200保持并且留在在生物反应器500中预定的时间段。然后可以停用压缩空气源,允许可膨胀囊状物1200至少部分放气,使得不再向柔性袋300施加压缩力。
在预定时间段过去之后,打开阀以允许生物反应器500内的营养物供给200返回到柔性袋300。在所示的实施例中,柔性袋300被布置在生物反应器500的底板高度下方的位置,使得当阀处于其打开位置时,营养物供给200能够在重力下自由地流回到柔性袋300。例如,营养物供给2可以被进给至生物反应器500并且每24小时在其中保持15分钟。将领会到,配量方案不限于这个特定示例,而是配量方案能够被定制为适合正在生长的相关植物类型的特性和/或液体营养物供给200的特性。
因此,以其各种形式的介质输送系统提供了许多独特的属性和优点。特别地,介质输送系统使营养物供给容器能够被另一个替换,以提供替换物和/或提供不同的营养物,以将其进给至植物;例如,在生长期内改变营养物的种类以更好地适应植物发育的每个阶段,这可以是有益的。有利地,营养物容器可以容易地更换,而无需搬运或以其他方式干扰板的堆叠和其中种植的植物。这使植物能够在组织培养繁殖过程的受控无菌条件下生长更长的时间。它还降低了生物反应器内植物受到污染的风险,并且还使得能够采取补救措施以去除某些已被识别的污染源,而无需搬运或以其他方式干扰植物和/或板的堆叠。此外,在本系统中,可以通过向生长介质中添加灭菌剂来控制确实发生的任何污染,而无需搬运或移动植物。
营养物控制器(未示出)可以与介质输送系统可操作地相关联,以促进对配量方案的自动或半自动控制。在其他形式中,介质输送系统可以由用户手动操作。
现在参考图15至图17,示出了植物繁殖系统50的另一个实施例。这个系统50特别有利于特别是通过植物组织培养(PTC)的方式用于种植无茎植物的过程。如本文所用,术语无茎植物应被理解为包括通常在地面或土壤水平以上具有很少或没有茎的植物。无茎植物有时被称为簇生或莲座丛型植物。
这种植物繁殖系统包括具有多个植物接收腔或开口52的托盘51,用于接收生长中的植物53。在所示的示例性实施例中,示出的托盘具有六个植物接收开口52。优选地,每个植物接收开口52接收单株植物53。
从本发明的以下描述中将认识到,托盘52不限于仅具有六个植物接收开口52。而是在本植物繁殖系统的实际商业应用中,应当领会,系统的效率随着可在单个托盘51中种植的植物的数量以及因此随着托盘51中的植物接收开口52的数量而增加。在所示实施例中使用六个植物接收开口52仅仅是为了以清楚的方式展示本植物繁殖系统的概念。
如下面进一步详细描述的,托盘51典型地被放置在生物反应器(未示出)中,以便放置在其底板上。因此,将领会的是,通过提供植物接收开口52的阵列,托盘51有利地提供一种用于以有序的方式种植多株植物53的结构,该结构具有针对生物反应器内的每株单独植物53的专用位置。
在所示的实施例中,托盘51的形状通常是矩形的,并且具有均匀的厚度或高度。在一些形式中,托盘51的大小为被紧密配合地接收在生物反应器内,从而有助于在纵向上,从一侧到另一侧或在这两个方向上将托盘51定位和放置在生物反应器内。在一些形式中,托盘可以包括从托盘51的外围边沿延伸或与之相关联的一个或多个定位构造,以便于在生物反应器内定位和放置托盘51。
植物接收开口52的大小和形状优选地参考要在其中种植的植物类型来选择。特别地,植物接收开口52的大小和形状被选择以符合各株植物53的自然生长趋势。例如,一些植物类型具有通常呈圆形或球形生长的自然趋势,使得优选具有圆形形状的植物接收开口52的托盘51。其他植物类型具有沿单轴生长的自然趋势,使得优选具有矩形形状的植物接收开口52的托盘51。将理解的是,开口52的形状不限于上述示例性形式。而在各种实施例中,每个开口52能够是正方形、三角形、六边形或其他合适的多边形形状。
在所示的实施例中,每个植物接收开口52是开放顶式开口或腔。每个开放顶式开口或腔52优选地具有一个或多个开口(未示出)的穿孔的底板4,从而有助于将液体营养物供给进给到在各开口52内种植的植物53的根系。
另外,当需要将托盘51从生物反应器中提起和移除以进行进一步处理时,每个植物接收开口52的底板54也能够提供帮助;例如,当植物52达到预定的生长发育所需阶段时。底板54可以抵靠各植物53的下侧,从而在一个或多个随后的进一步处理步骤(例如,切割过程)期间稳定或限制植物的运动。
在这一点而言,植物繁殖系统还包括切割元件(未示出),该切割元件被适配为在托盘51中生长的每株单独的植物53中进行至少一次切割,从而将植物53分成两个或更多较小的子植物部分55。
一旦植物53达到预定的发育阶段,就进行切割过程。可以根据植物53在托盘中生长的时间段和/或植物53的大小或植物的其他相关特征来确定发育阶段。
优选地,切割元件被配置为均匀地切割或分割每株植物53,由此每个被切下的植物部分55具有基本相同的大小。在如图2所示的实施例中,切割元件被配置成沿着两条正交布置的切割线进行切割动作。切割线在托盘51中的相应开口52的中心点处相交。在这个实施例中,切割元件将每株植物3切割或分割成大小基本相等的四个较小的植物部分5,或者换句话说,切割元件用于对每株植物3进行四等分。
切割元件切割或分割每株植物的方式可以相对于切割元件本身的形状或配置来确定。在一些形式中,切割元件被适配为在单个切割动作中将每株植物分割成预定的较小植物部分。在其他形式中,切割元件被适配为用两个或更多切割动作、行程或通过路径将每株植物分割成预定的较小植物部分。
例如,在切割元件是具有单个切割刃的刀片的形式的情况下,该切割元件可以用于通过第一切割动作,例如,刀片向着托盘的向下或下降移动并且进入各开口或腔52中,将植物切割或分割成两半。在第一切割动作之后,在这个示例中,刀片可以相对于托盘转动(和/或托盘可以相对于刀片转动)预定的程度或角度(例如,90度),使得切割元件能够进行第二切割动作以进一步分割植物(例如,将被第一切割动作形成的半株植物部分中的每份切割成四分之一植物部分)。
在其他形式中,切割元件可以包括刀片,该刀片被配置为用单次切割动作或通过路径将每株植物四等分。例如,刀片可以大体上为t形或加号(“+”)形,从而将植物切割或分割成四个植物部分55。
切割元件的形状和配置能够被适配为适合特定的应用或植物类型和/或以特定的方式切割或分割植物。在其他形式中,切割元件可以包括是直边的、斜切的、倒角的、锯齿状的、有锯齿的等等,从而在切削强度(例如,切削较厚和/或较硬的植物)和/或切割/精确度的粗糙(例如,精细至粗略的切割)方面增强其切割能力。
将理解的是,切割元件不限于具有根据仅作为示例提供的上述非限制性示例性形式成形的切割刀片。
切割元件可以包括远离刀片延伸的手柄部分,从而有利于切割元件的手动操作以及托盘51内生长的植物53的手动切割。在某些应用中,切割元件被适配为附接至选择性可操作的执行器,从而促进自动和半自动的切割过程。
在这样的实施例中,致动器可以被适配为促进切割元件朝向托盘51和远离托盘51的运动,从而产生切割动作,以切割或分割在托盘内生长的各植物。例如,致动器是线性致动器,其被配置为引起切割元件的相应线性运动(例如,向上运动和向下运动)。在其他形式中,致动器可以包括用于引起切割元件的线性位置运动的第一致动器和用于引起切割元件的旋转位置运动的第二致动器,从而有利于切割元件相对于托盘的定位和对齐,并且因此有利于切割元件相对于在其中种植的各株植物的定位和对齐。在一些其他形式中,切割元件可以形成机械臂的末端执行器,由此机械臂被配置为控制切割元件的运动并且因此控制相关联的切割动作,包括例如切割速度、频率、定时等。
单个切割元件可以被用于切割在托盘51内种植的每株植物53。例如,切割元件可以被用来根据预定程序(例如,依次横越第一行,然后第二行等等)在托盘51的每个开口52中执行切割动作。可替换地,切割元件被用于通过参考每株植物的预定生长期或每株植物的发育阶段(例如大小或形状)来对植物执行切割动作。
切割元件可以被适配为在单个切割操作期间切割多株植物53。例如,切割元件可以包括以相对间隔的关系布置的多个刀片,其中刀片之间的间隔对应于托盘中的所期望同时切割的开口之间的间隔。用这样的切割元件,刀片可以被间隔开,使得托盘的第一行中的每株植物被同时切割。在一些示例性形式中,切割元件可以被适配为同时切割在托盘51的植物接收构造内种植的每株植物53。
植物繁殖系统优选地包括封盖(未示出),该封盖可释放地安装至托盘51的上表面或与其相邻。封盖可以被安装到托盘51上以约束或限制每株植物能够生长的高度。封盖可以被适配为在从托盘上移除封盖时切割或修剪植物,使得每株修剪过的植物具有基本相同的高度。例如,封盖可以可滑动地安装到托盘,由此在滑动动作以从托盘上移除封盖时,托盘剪切植物以修剪伸出到封盖的高度上方的新枝。在其他形式中,可以提供专用的植物修剪装置,用于将植物修剪到期望的高度。
植物繁殖系统优选地包括多个托盘51,其中第一托盘51(图1)被用于种植第一批植物53,第二托盘51’(图3)被用于种植从第一批植物53切下的植物部分55的第二批植物53。其他托盘能够被用于从随后切下的植物部分中生长另外的批次。
切下的植物部分55的摘取能够作为手动操作来执行,可选地用手或借助于专用的植物抓握机构来执行。在使用植物抓握机构时,抓握机构可以被附接到致动器,例如线性致动器、旋转致动器或机械臂,以帮助从托盘上自动或半自动地移除切下的植物部分并且随后转移至另一个托盘以重新开始生长过程。
在切割动作结束时将切割元件保持在各植物接收开口内的适当位置,同时将切下的植物部分从腔52/托盘51移除,是有利的。通过在移除切下的植物部分的过程中将切割元件保持在这个位置,减少了在摘取过程中无意地移除了切下的另一个植物部分的风险。
应当理解,植物繁殖系统能够有利地用于以受控和可重复的方式生长成批的植物。它提供了一种方法,通过该方法可以将植物切成均匀的子植物部分。能够以相对较高的速度很容易地将多株植物切成大小均匀的子部分的能力,特别是经由自动或半自动方式,极大地提高了基于植物组织培养(PTC)的整个植物繁殖过程的效率。这主要是由于能够减少每株植物的切割时间以及转移和重新种植(例如,在另一个托盘中)切下的植物部分以重复生长周期的时间而产生的。切下的子部分的均匀性质还增强了将这些子植物部分种植到期望的发育阶段的可能的成功率或存活率。这个过程能够被重复以继续生长周期。
因此,本公开以其各种形式提供了许多独特的属性和优点,包括将多种植物组织培养物保持在生物反应器内清晰限定的规则间隔位置的能力,极大地提高了产生克隆插枝的效率。该系统允许在单程切割操作中进行多个切割的能力带来了在设定的时间段内能够产生更多数量的切割的好处。在给定时间段内显著生产更多插枝的能力有利地使得包括人工成本在内的运营成本得以显著降低,从而降低了在植物组织培养繁殖下生产的每条插枝的成本。
此外,如上面注意到的,该系统使营养物供给容器能够被另一个替换,以提供替换物和/或提供不同的营养物,以将其进给至植物;例如,在生长期内改变营养物的种类以更好地适应植物发育的每个阶段,这可以是有益的。
该系统在被配置为与培养和收获过程相关联的上游和下游自动化设备一起使用的能力方面也具有高度适应性,从而进一步提高总体运行效率并且降低与植物组织培养物生产相关联的成本。在这一点而言,本公开的优选实施例的另一个优点是提供一种能够以与现有温室自动化设备兼容的形式来输送PTC并且减少劳动需求的系统。更具体地,本公开的实施例有利地使包含已在生物反应器中达到预定发育阶段的植物的托盘能够在同一托盘中直接从生物反应器转移至温室或室外环境。即,植物能够留在原始托盘内而不是转移到新托盘上,从而减少了处理时间并且因此减少了相关的人工成本。这个特别的优点来自在生物反应器内生长的初始阶段液体介质或营养物供给的使用。在将托盘转移到温室或室外环境后,植物便能够生长到功能全面的植物阶段,并且能够使用包括自动化设备在内的现有设备进行操作。在此,有利的是,为每个托盘提供有助于以并排和/或端对端的方式连接多个托盘的连接器,以有效地生产较大的组合托盘,该托盘的大小使得能够经由现有的(自动化)设备和其他相关处理设备将其从无菌环境(例如,实验室)运载到非无菌环境(例如,温室或室外环境)。
因此,将领会到,该系统固有地能够使植物组织培养物的繁殖比现有技术更具成本效益,并且在某些情况下可与与播种技术相关的成本相比。
在这些和其他方面,本文中描述的系统和方法代表了对现有系统的实用和商业上的显着改进。尽管已经参考特定示例描述了本公开,但是本领域技术人员将领会,本文中描述的系统和方法可以以许多其他形式来体现。
- 用于繁殖浅黄恩蚜小蜂的载体植物系统及构建方法、繁殖方法及防治粉虱类害虫的方法
- 植物繁殖系统、装置和方法