一种基于大数据建模的无人驾驶智能分析系统
文献发布时间:2023-06-19 10:58:46
技术领域
本发明涉及无人驾驶领域,尤其涉及一种基于大数据建模的无人驾驶智能分析系统。
背景技术
无人驾驶汽车是智能汽车的一种,也称为轮式移动机器人,主要依靠车内的以计算机系统为主的智能驾驶仪来实现无人驾驶的目,其通过车载传感系统感知道路环境,自动规划行车路线并控制车辆到达预定目标的智能汽车。无人驾驶汽车的首要要求就是其安全性和稳定性,安全性主要依靠其识别障碍和避障能力,稳定性则依赖于其线路规划。现有无人驾驶的基础系统有两个,一个是防抱死制动系统、牵引和稳定控制系统。
牵引和稳定控制系统比任何驾驶员的反应都灵敏,系统中的各个模块会协调工作防止车辆失控,稳定牵引系统不断读取汽车的行驶方向、速度以及轮胎与地面的接触状态,当探测到汽车将要失控并有可能导致翻车时,稳定或牵引控制系统将进行提前干预。这是无人驾驶实现应急处理的安全保证。防抱死制动系统,即便是非无人驾驶车也是极其必要的系统,驾驶没有防抱死系统的汽车时,驾驶员要反复踩踏制动踏板来防止轮胎锁死。而防抱死系统可以代替驾驶员完成这一操作,并且比手动操作效果更好。综合这两个系统实现无人驾驶的安全控制。
尽管系统配置较为完善,然而无人驾驶车的关键还是尽量减少避障以及安全防护的事件发生,即提前预防,这是实现其安全稳定运行的关键,也是对无人系统的智能分析能力做出的挑战。
发明内容
本发明的目的是为了解决现有技术中存在的缺点,而提出的一种基于大数据建模的无人驾驶智能分析系统。
为了实现上述目的,本发明采用了如下技术方案:
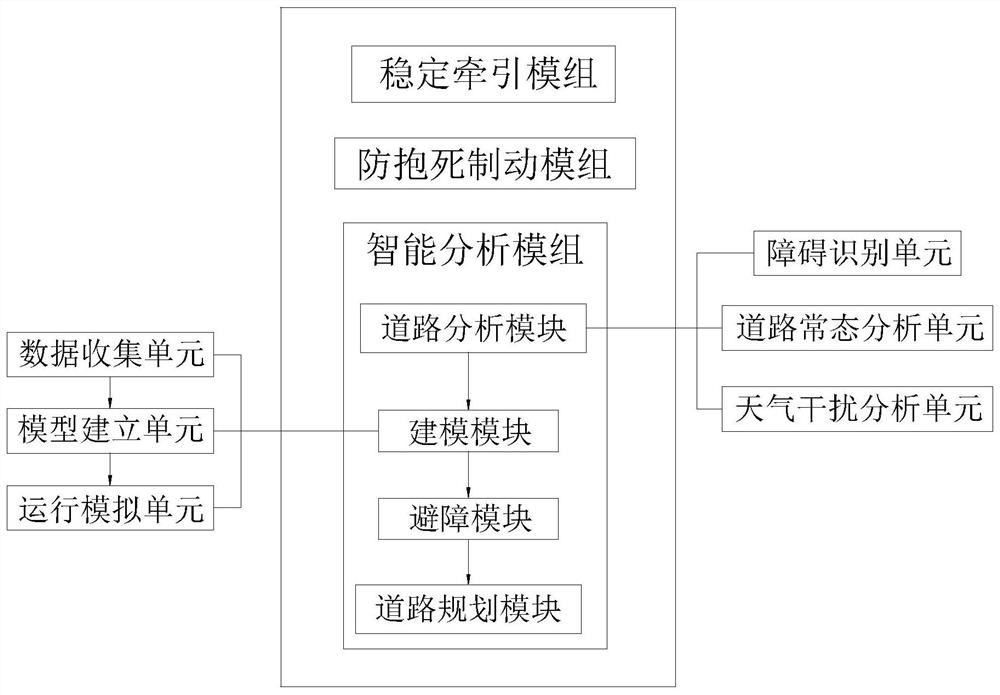
一种基于大数据建模的无人驾驶智能分析系统,包括用于应对车辆不稳定时干预维稳的稳定牵引模组、避免车轮锁死的防抱死制动模组、分析路面情况并对车辆运行路线进行规划的智能分析模组;所述智能分析模组包括道路分析模块、建模模块、避障模块、道路规划模块,所述道路规划模块完成无人驾驶的路线规划并生成对应的路线驾驶方案,让车辆各个部件配合完成无人驾驶;所述道路分析模块包括障碍识别单元、道路常态分析单元、天气干扰分析单元;所述建模模块包括数据收集单元、模型建立单元、运行模拟单元。
优选的,所述智能分析模组的工作方法包括以下步骤:S1路况分析;道路分析模块对道路情况进行分析,并生成相应的数值数据;S2路况建模;数据收集单元收集道路分析模块得到的数值数据以及路面摄像数据,完成对路面行驶的驾驶数据收集,再按照数据建立路况模型,模拟车辆在未来一段路况的运行状况;S3避障模块;根据S2中建立的模型,避障模块对识别出的危险障碍物进行分析,并在建模中进行路线修改,规避障碍物,使用避障模块修改后的路线再次进行路线运行模拟,直到不再出现碰撞;S4路线规划模块;根据S3中得到的路线进行无人驾驶的路线规划,并将完成路线运行的参数配置,让车辆各部件协调实现路线运行。
优选的,在S1路况分析的步骤中,其工作方法包括几个部分;S11道路常态分析;道路常态分析单元包括GPS组件、GIS组件,首先与道路监管摄像连接,完成前方路况调入,其路况信息包括车辆数目、道路坡道、车道破损情况、人流量,分析后完成道路基础数值导入;S12障碍识别;道路常态分析后根据交管实时摄像,完成前方道路的障碍物区分,其区分区域呈圆形,且区域半径为500m;S13天气干扰分析;测量温度湿度,以及未来20min内的天气变化,对道路的路况进行预测分析。
优选的,在S2路况建模的步骤中,数据收集单元接收道路分析模块的分析数据,综合道路基础数据完成道路、车辆、路况的建模,再利用模型进行试运行,判断出现的危险情况有哪些,再利用避障模块依次解决。
优选的,道路分析模块的分析数据包括车流量、路面起伏数据、干湿度数据;道路基础数据包括路面宽度、车道数目、红绿灯数目、道路限速数值。
优选的,避障模块解决的情况包括:a.障碍物碰撞;根据碰撞情况修改路线,规避障碍物;其中障碍物为路面常态分析以外的物体,会导致车体碰撞且物体最大直径超过0.25m的物体;b.路面打滑和车辆跳跃;避障模块首先减小车速,如果仍不能解决问题,再按照障碍物分析进行路线更改。
优选的,建模模块的工作基于可视化三维建模软件,其建模方法基于车辆路况数据库的在线学习训练。
本发明的有益效果为:本发明中,在智能分析模组中设置了道路分析模块和建模模块,对道路前方情况进行建模分析,通过大数据训练既能建模模拟得到趋近于实际情况的建模结果,又能实现模型的可视化展现,提升了无人驾驶的提前应对能力,保证其驾驶路线最优性,安全性大大提高。
附图说明
图1为本发明所述智能分析系统的结构示意图。
具体实施方式
下面将结合具体实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
参照图1,一种基于大数据建模的无人驾驶智能分析系统,包括用于应对车辆不稳定时干预维稳的稳定牵引模组、避免车轮锁死的防抱死制动模组、分析路面情况并对车辆运行路线进行规划的智能分析模组;智能分析模组包括道路分析模块、建模模块、避障模块、道路规划模块,道路规划模块完成无人驾驶的路线规划并生成对应的路线驾驶方案,让车辆各个部件配合完成无人驾驶;道路分析模块包括障碍识别单元、道路常态分析单元、天气干扰分析单元;建模模块包括数据收集单元、模型建立单元、运行模拟单元。
在本实施例中,智能分析模组的工作方法包括以下步骤:S1路况分析;道路分析模块对道路情况进行分析,并生成相应的数值数据;S2路况建模;数据收集单元收集道路分析模块得到的数值数据以及路面摄像数据,完成对路面行驶的驾驶数据收集,再按照数据建立路况模型,模拟车辆在未来一段路况的运行状况;S3避障模块;根据S2中建立的模型,避障模块对识别出的危险障碍物进行分析,并在建模中进行路线修改,规避障碍物,使用避障模块修改后的路线再次进行路线运行模拟,直到不再出现碰撞;S4路线规划模块;根据S3中得到的路线进行无人驾驶的路线规划,并将完成路线运行的参数配置,让车辆各部件协调实现路线运行。
在本实施例中,在S1路况分析的步骤中,其工作方法包括几个部分;S11道路常态分析;道路常态分析单元包括GPS组件、GIS组件,首先与道路监管摄像连接,完成前方路况调入,其路况信息包括车辆数目、道路坡道、车道破损情况、人流量,分析后完成道路基础数值导入;S12障碍识别;道路常态分析后根据交管实时摄像,完成前方道路的障碍物区分,其区分区域呈圆形,且区域半径为500m;S13天气干扰分析;测量温度湿度,以及未来20min内的天气变化,对道路的路况进行预测分析。
在本实施例中,在S2路况建模的步骤中,数据收集单元接收道路分析模块的分析数据,综合道路基础数据完成道路、车辆、路况的建模,再利用模型进行试运行,判断出现的危险情况有哪些,再利用避障模块依次解决。
在本实施例中,道路分析模块的分析数据包括车流量、路面起伏数据、干湿度数据;道路基础数据包括路面宽度、车道数目、红绿灯数目、道路限速数值。
在本实施例中,避障模块解决的情况包括:a.障碍物碰撞;根据碰撞情况修改路线,规避障碍物;其中障碍物为路面常态分析以外的物体,会导致车体碰撞且物体最大直径超过0.25m的物体;b.路面打滑和车辆跳跃;避障模块首先减小车速,如果仍不能解决问题,再按照障碍物分析进行路线更改。
在本实施例中,建模模块的工作基于可视化三维建模软件,其建模方法基于车辆路况数据库的在线学习训练。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种基于大数据建模的无人驾驶智能分析系统
- 一种基于大数据技术的智能分析系统