一种光定位系统
文献发布时间:2023-06-19 11:00:24
技术领域
本发明涉及光定位技术领域,具体来说,涉及一种光定位系统。
背景技术
实际环境中,被定位点的感光元件随时可能会接收到环境中其他的光信号,包括但不局限于:自然光、照明灯光等;再者,受激光强度、激光线束宽度、光编码衰减等情况的影响,单基站的定位范围是有限的,但是使用者往往希望在保持原有定位精度的情况下拥有更大的定位范围;其次,部分场景下使用者希望得到被定位点的绝对位置,另一些情况下只需要知道被定位体相对于基站的相对位置即可。
发明内容
针对相关技术中的上述技术问题,本发明提出一种光定位系统,能够克服现有技术的上述不足。
为实现上述技术目的,本发明的技术方案是这样实现的:
一种光定位系统,该系统包括:PC板,所述PC板通过线缆与被定位体连接,所述被定位体通过WIFI与若干基站连接;
所述的光定位系统的方法包括需要得到被定位点绝对位置和不需要确定被定位点绝对位置,其中,
所述的需要得到被定位点绝对位置的方法以下步骤:
S1:记录好基站绝对位置;
S2:初始化;
S3:根据解算的LFSR特征值识别具体的线光源;
所述步骤S3包括以下步骤:
S31:对接收到的序列片段反解算;
S32:推算出具体序列;
S33:确定序列片段在序列中的位置;
S34:识别具体基站;
S4:直接确定被定位点绝对位置;
所述的不需要确定被定位点绝对位置的方法以下步骤:
S101:随意摆放定位基站;
S102:初始化;
S103:确定各基站相对位置,其中,确定位置的过程中,手持定位设备,使设备充分暴露在两个基站的光信号都能覆盖到的位置;
S104:PC端软件会根据已知的各基站间的相对坐标,建立相对坐标系,其中,被定位体的运动相对于该坐标系进行,并同步进行轨迹绘制。
进一步的,所述步骤S3中,不同的基站的每个激光区都对应唯一的LFSR序列。
本发明的有益效果:通过该系统,解决了实际场景中的干扰强、范围有限、需求不同等问题,并保证了系统定位仍然拥有超高定位的精度。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
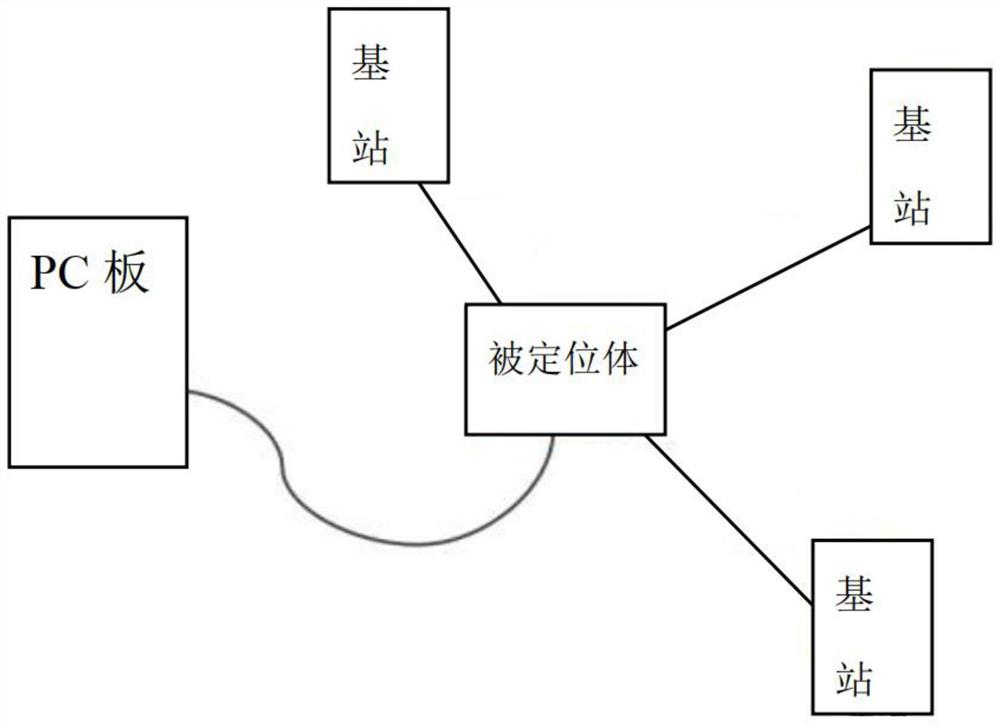
图1是根据本发明实施例所述的一种光定位系统的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
如图1所示,根据本发明实施例所述的一种光定位系统,包括:PC板,所述PC板通过线缆与被定位体连接,所述被定位体通过WIFI与若干基站连接;
所述的光定位系统的方法包括需要得到被定位点绝对位置和不需要确定被定位点绝对位置,其中,
需要得到被定位点绝对位置的方法以下步骤:
S1:记录好基站绝对位置;
S2:初始化;
S3:根据解算的LFSR特征值识别具体的线光源;
步骤S3包括以下步骤:
S31:对接收到的序列片段反解算;
S32:推算出具体序列;
S33:确定序列片段在序列中的位置;
S34:识别具体基站;
S4:直接确定被定位点绝对位置;
不需要确定被定位点绝对位置的方法以下步骤:
S101:随意摆放定位基站;
S102:初始化;
S103:确定各基站相对位置,其中,确定位置的过程中,手持定位设备,使设备充分暴露在两个基站的光信号都能覆盖到的位置;
S104:PC端软件会根据已知的各基站间的相对坐标,建立相对坐标系,其中,被定位体的运动相对于该坐标系进行,并同步进行轨迹绘制。
在本发明的一个具体实施例中,所述步骤S3中,不同的基站的每个激光区都对应唯一的LFSR序列。
为了方便理解本发明的上述技术方案,以下对本发明的上述技术方案进行详细说明。
光定位系统架构一般如图1所示:
被定位体负责数据前期处理,PC负责数据后期处理(运算较多),二者间用线缆传输信号;基站和被定位体之间用WIFI进行低数据量通信,主要进行基站的设置。
定位信息最终在运行于PC上的定位软件中显示,对基站的设置也在软件中完成。
在前述需求中,差异较大的需求为“是否需要得到被定位点的绝对位置”,一致需求是扩大定位范围、有较强抗干扰能力等,因此下文围绕差异点分类说明。
一、需要得到被定位点绝对位置
1.使用多基站增加系统定位区域范围,根据单基站定位范围进行空间规划,保证定位空间的每个点至少有一个基站能够覆盖到,记录好基站绝对位置
2.初始化,(在PC端软件上手动或自动)为本次定位中的所有基站分配唯一ID,并通过WIFI将该ID通知给相应基站,基站根据分配到的ID决定自身电机的转速(这决定了其光信号的频率)以及各个激光区所用的LFSR序列。(在干扰不大的情况下)被定位点可以通过接收到的信号频率初步确定信号来自哪个基站,极大地减少了运算量。
3.根据解算的LFSR特征值识别具体的线光源
不同的基站的每个激光区都对应唯一的LFSR序列,经过对接收到的序列片段的反解算,可以推算得到这具体是哪个序列,并可以确定该序列片段在序列中的位置。即可以完成识别具体基站、实现自同步的功能,此时可以确定被定位体和基站的相对位置。
4.直接确定绝对位置
因为基站的绝对位置已经确定,在得知定位体和基站的相对位置后即可完成绝对位置的定位,如果被定位点位于多基站覆盖范围重叠区,还可以根据不同基站的定位结果进行数据校准,该校准不仅可用于重叠区的定位点,也可以用于基站定位算法本身。
二、不需要确定被定位点绝对位置(如表演性质的机器鱼水下编队巡游)
1.随意摆放定位基站,但需要保证定位基站间存在覆盖范围重合的区域。
2.初始化,同一、2。
3.确定各基站相对位置
在本步骤之前基站间是不知道各自的相对位置的,手持定位设备,使其充分暴露在两个基站的光信号都能覆盖到的位置,所谓充分暴露是指对每个定位基站,定位设备上都各至少有三个定位点被其光信号覆盖。这种情况下,定位设备可以确定出自己相对于各个基站的三维坐标,于是可以推测得到各个基站间的相对坐标。此后被定位体只需要确保自身被一个基站信号覆盖即可。
4.建立相对坐标系
PC端软件会根据已知的各基站间的相对坐标,建立坐标系,被定位体的所有运动都是相对于该坐标系进行的,并同步进行轨迹绘制。此时被定位体在高精度的定位下可完成预定的行为或动作。
综上所述,借助于本发明的上述技术方案,通过该系统,解决了实际场景中的干扰强、范围有限、需求不同等问题,并保证了系统定位仍然拥有超高定位的精度。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 基于可见光及红外光视觉的机载目标定位系统及方法
- 一种光定位系统和追光方法