致动器驱动装置、以及致动器驱动装置的控制方法
文献发布时间:2023-06-19 11:06:50
技术领域
本发明涉及一种致动器驱动装置、以及致动器驱动装置的控制方法。
背景技术
一直以来,已知有一种如下的致动器驱动装置,该致动器驱动装置具备使一对部件间的距离发生变化的致动器、和以使一对部件间的距离成为目标值的方式来对致动器进行控制的控制部(例如,参照专利文献1)。
例如,专利文献1中所记载的致动器驱动装置为,具有相互对置的一对基板并在各个基板的相互对置的面上分别设置有反射膜的可变干涉装置。此外,该可变干涉装置被构成为,在各个基板的相互对置的面上具备用于对静电电容进行检测的电极,且能够通过静电电容检测电路而检测出静电电容。而且,可变干涉装置具备使一对基板中的一方朝向另一方而进退的致动器。在这样的可变干涉装置中,对致动器进行控制的控制电路基于由静电电容检测电路所检测出的静电电容而对向致动器施加的电压进行反馈控制。由此,能够以一对反射膜之间的尺寸成为目标值的方式进行控制。
但是,在专利文献1所记载的那样的致动器驱动装置中,响应性和干扰抑制性存在有此消彼长的关系,当提高响应性时,干扰抑制性将降低,当提高干扰抑制性时,响应性将降低。
也就是说,在致动器装置中,当向致动器施加电压时,通过致动器而进行位移的部件会发生振动。此时,通过基于由静电电容检测电路检测出的静电电容而对向致动器施加的电压进行反馈控制,从而能够抑制上述振动,并使部件间的距离成为目标值。
在此,在使部件间的距离更迅速地与目标值一致的情况下,会将控制电路的设定设为重视响应性的设定。由此,以使反馈控制时的向致动器施加的电压变大的方式来实施控制。另一方面,在有干扰振动施加于致动器装置上的情况下,控制电路将以对致动器进行反馈控制而将振动收敛的方式来发挥功能。但是,在像上述那样作为重视响应性的设计的情况下,对于针对微小的干扰振动的反馈控制而言,有时会施加有过度的控制电压,从而在振动收敛上会花费时间,由此降低了干扰抑制性。
相反地,如果将控制电路的设定设为重视干扰抑制性的设定,则响应性降低,从而使直至部件间的距离成为目标值为止的时间变长。
专利文献1:日本特开平1-94312号公报
发明内容
第一方式所涉及的致动器驱动装置具备:第一部件;第二部件,其隔着间隙而与所述第一部件对置;间隙传感器,其对所述间隙的尺寸进行检测;第一致动器,其通过被输入有第一电压信号,从而使所述间隙的尺寸发生变化;第二致动器,其通过被输入有第二电压信号,从而使所述间隙的尺寸发生变化,所述第一电压信号为,在经过预定时间之后成为固定的偏置电压、且在经过所述预定时间之前包含有大于所述偏置电压的过冲信号的电压信号,所述第二电压信号为,以使由所述间隙传感器所检测出的检测值接近目标值的方式被反馈控制的电压信号。
第二方式所涉及的致动器驱动装置的控制方法为如下的致动器驱动装置的控制方法,所述致动器驱动装置具备:第一部件;第二部件,其隔着间隙而与所述第一部件对置;间隙传感器,其对所述间隙的尺寸进行检测;第一致动器,其通过被输入有第一电压信号,从而使所述间隙的尺寸发生变化;第二致动器,其通过被输入有第二电压信号,从而使所述间隙的尺寸发生变化,在该控制方法中,实施如下工序,即:向所述第一致动器施加所述第一电压信号的第一电压施加工序;向所述第二致动器施加所述第二电压信号的第二电压施加工序,在所述第一电压施加工序中被施加的所述第一电压信号为,在经过预定时间之后成为固定的偏置电压、且在经过所述预定时间之前包含有大于所述偏置电压的过冲信号的电压信号,在所述第二电压施加工序中被施加的所述第二电压信号为,以使由所述间隙传感器所检测出的检测值接近目标值的方式被反馈控制的电压信号。
附图说明
图1为表示本发明所涉及的一个实施方式的分光装置的概要结构的示意图。
图2为表示在本实施方式中从偏置驱动电路向第一致动器施加的第一电压信号的信号波形的一个示例的图。
图3为表示本实施方式的分光装置的控制方法的流程图。
图4为表示在本实施方式中施加到第一致动器上的第一电压信号的一个示例和比较例的偏置电压信号的一个示例的图。
图5为表示本实施方式以及比较例中的镜面间隙的变化的一个示例的图。
图6为表示变形例一所涉及的第一电压信号的一个示例的图。
具体实施方式
以下,对一个实施方式所涉及的分光装置进行说明。
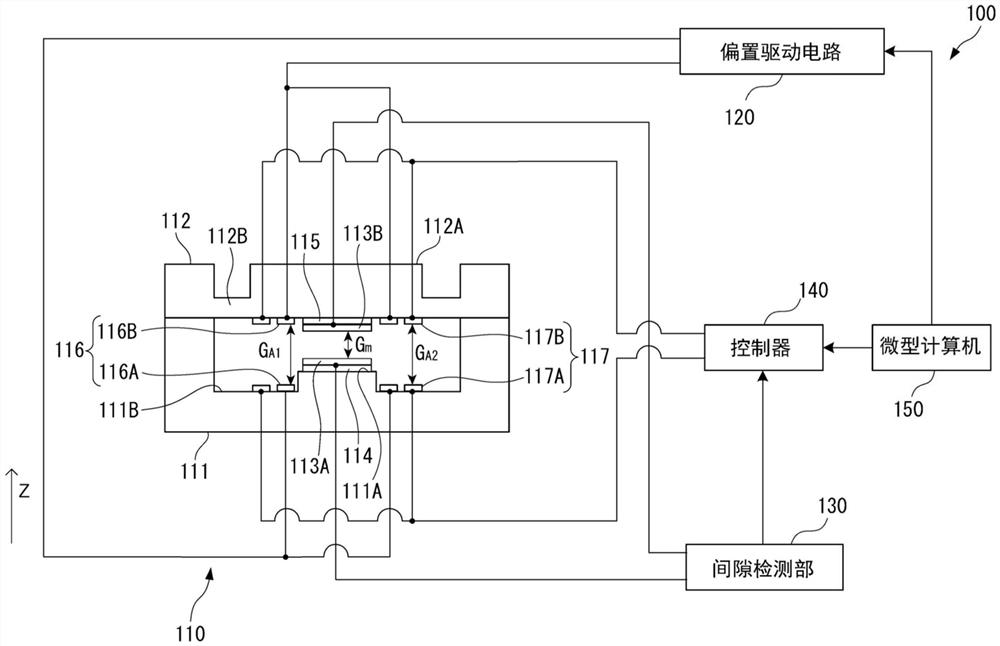
图1为,表示本实施方式的分光装置100的概要结构的示意图。
分光装置100的整体结构
分光装置100为致动器驱动装置的一个示例,且为从入射光中对所期望的目标波长的光进行分光并输出的装置。如图1所示那样,该分光装置100被构成为,包括干涉滤波器110、偏置驱动电路120、间隙检测部130、控制器140和微型计算机150。
以下,对各个结构进行详细地说明。
干涉滤波器110的结构
如图1所示那样,干涉滤波器110具备透光性的第一基板111以及第二基板112。第一基板111相当于第一部件,第二基板112相当于第二部件。这些第一基板111以及第二基板112通过例如将硅氧烷作为主要成分的等离子聚合膜等接合膜而被接合,从而被一体构成。
另外,在以后的说明中,将从第一基板111朝向第二基板112的方向设为Z方向。Z方向为,与干涉滤波器110的光入射面以及光出射面正交的方向。
在第一基板111的与第二基板112对置的面上,设置有通过蚀刻等而被形成的凹部,通过该凹部,从而使第一基板111和第二基板112隔着间隙而对置。
具体而言,被设置于第一基板111上的凹部包括第一凹部111A、和以包围第一凹部111A的四周的方式被设置的第二凹部111B。
另外,虽然在图1所示的示例中,第一凹部111A的与第二基板112对置的面与第二凹部111B的与第二基板112对置的面相比位于接近第二基板112的位置,但并未被限定于此。
例如,第一凹部111A的与第二基板112对置的面也可以与第二凹部111B的与第二基板112对置的面相比而远离第二基板112。或者,第一凹部111A的与第二基板112对置的面也可以与第二凹部111B的与第二基板112对置的面为同一平面。而且,虽然在本实施方式中,示出了通过第一基板111的凹部而在第一基板111与第二基板112之间形成了间隙的示例,但例如也可以设为如下结构,即,在第一基板111与第二基板112之间设置有间隔件,通过间隔件的厚度而形成间隙的结构。
另外,在本实施方式中的第一基板111与第二基板112之间的间隙中,包括有后文叙述的第一反射膜114与第二反射膜115之间的镜面间隙G
第一基板111在第一凹部111A的与第二基板112对置的面上具备第一反射膜114。该第一反射膜114既可以由金属膜或金属合金膜构成,也可以由电介质多层膜构成。
在第一反射膜114的表面上,例如,设置有由ITO等的透明电极构成的第一电容电极113A。
此外,第一基板111在第二凹部111B的与第二基板112对置的面上设置有第一电极116A。该第一电极116A以包围第一反射膜114的方式被配置,并与第一电容电极113A绝缘。而且,第一电极116A隔着第一致动器间隙G
而且,第一基板111在第二凹部111B的与第二基板112对置的面上,设置有与第一电容电极113A以及第一电极116A绝缘的第三电极117A。该第三电极117A以包围第一电极116A的方式被配置,并隔着第二致动器间隙G
在第二基板112的与第一基板111相反侧的面上,设置有圆环状的凹槽,由此,第二基板112以包括作为圆环状的凹槽的内侧的可动部112A、和作为凹槽的底面的隔膜部112B的方式被构成。
在可动部112A的与第一基板111对置的面上,设置有第二反射膜115。该第二反射膜115隔着镜面间隙G
此外,在第二基板112的可动部112A以及隔膜部112B中的至少任一个上,设置有与第一电极116A对置、且与第二电容电极113B绝缘的第二电极116B。该第二电极116B与第一电极116A一起构成第一致动器116。
而且,在第二基板112的可动部112A以及隔膜部112B中的至少任一个上,设置有与第三电极117A对置、且与第二电极116B绝缘的第四电极117B。该第四电极117B与第三电极117A一起构成第二致动器117。
在上文那样的干涉滤波器110中,作为波长可变型的法布里-珀罗标准具而发挥功能,通过对第一致动器116以及第二致动器117施加电压,从而在电极间作用有静电引力,由此使可动部112A向第一基板111侧进行位移。由此,能够对镜面间隙G
在此,在本实施方式中,通过将来自偏置驱动电路120的偏置电压施加到第一致动器116上,从而以使镜面间隙G
由此,第一反射膜114以及第二反射膜115的镜面间隙G
偏置驱动电路120的结构
图2为,在本实施方式中,表示从偏置驱动电路120向第一致动器116施加的第一电压信号的信号波形的一个示例的图。
偏置驱动电路120基于微型计算机150的控制,从而对第一致动器116施加第一电压信号。如图2所示那样,该第一电压信号为,在从第一电压信号的施加开始定时起至经过预定时间(稳定化时间ta)之前的电压转换期间T
在此,在本实施方式中,第一致动器116以使镜面间隙G
在此,最大偏置电压V
数学式1
在式(1)中,S为第一电极116A与第二电极116B相互对置的面积,也就是,在从Z方向进行观察时,第一电极116A与第二电极116B重合的面积。K
最大偏置电压V
另外,关于偏置电压V
此外,也可以在从微型计算机150输入的偏置指令信号中包括最大偏置电压V
如图2所示那样,从偏置驱动电路120输出的第一电压信号的电压转换期间T
此外,电压转换期间T
间隙检测部130的结构
间隙检测部130与第一电容电极113A以及第二电容电极113B电连接,并与第一电容电极113A以及第二电容电极113B一起构成间隙传感器。该间隙检测部130为,对第一电容电极113A以及第二电容电极113B的静电电容进行检测的电容检测电路。由于第一电容电极113A以及第二电容电极113B的静电电容与镜面间隙G
控制器140的结构
控制器140与间隙检测部130以及微型计算机150相连接。而且,控制器140向第二致动器117施加第二电压信号,并且以使镜面间隙G
另外,控制器140也可以为将第二电压信号作为模拟信号而输出的模拟式控制器,还可以为将第二电压信号作为数字信号而输出的数字式控制器。在使用数字式控制器的情况下,控制器140也可以被集成到微型计算机150中。
微型计算机150的结构
微型计算机150由运算电路与存储电路构成,并对分光装置100的整体的动作进行控制。微型计算机150与连接分光装置100和外部接口的接口(省略图示)相连接,并且也能够接收来自外部接口的信号。作为来自外部接口的信号,能够例示有对例如通过分光装置100而使之分光的光的目标波长进行指定的信号等。另外,分光装置100也可以设为具有接受由用户实施的输入操作的操作部的结构,在该情况下,以使来自操作部的操作信号被输入至微型计算机150中的方式而构成。
该微型计算机150通过运算电路读取并执行被存储于存储电路中的程序,从而将与目标波长相应的偏置指令信号输出至偏置驱动电路120,从而将目标指令信号输出至控制器140。
分光装置100中的动作
接下来,对分光装置100的控制方法进行说明。
图3为,表示本实施方式的分光装置100的控制方法的流程图。
在通过分光装置100来实施分光处理的情况下,首先,微型计算机150对目标波长进行设定(步骤S1)。例如,微型计算机150既可以对从外部设备所取得的目标波长进行设定,也可以对从操作部被输入的目标波长进行设定。此外,在对预定波长间隔的各个波长的分光波长进行设定的情况下,微型计算机150对被预先设定的目标波长进行设定并实施后述的步骤S2至步骤S4的处理,之后,再次返回至步骤S1,对目标波长进行设定,从而反复执行分光处理。由此,能够依次输出每个预定间隔的各个波长的光。
接下来,微型计算机150将与目标波长相应的偏置指令信号输出至偏置驱动电路120中,并将与目标波长相应的目标指令信号输出至控制器140(步骤S2)。
由此,偏置驱动电路120在接收到目标指令信号时,将与目标波长相应的第一电压信号施加到第一致动器116上(步骤S3:第一电压施加工序)。
也就是说,偏置驱动电路120在从施加开始定时起至稳定化时间t
此外,在经过稳定化时间t
此外,与步骤S3同时地,控制器140基于从间隙检测部130被输入的检测信号和目标指令信号,而向第二致动器117施加第二电压信号并进行反馈控制(步骤S4:第二电压施加工序)。
图4为,表示在本实施方式中被施加到第一致动器116上的第一电压信号的一个示例和比较例的偏置电压信号的一个示例的图。在图4中,实线表示本实施方式的第一电压信号,虚线表示比较例1的偏置电压信号。
图5为,表示镜面间隙G
比较例的偏置电压信号的信号波形为暂时延迟曲线,在该情况下,能够在抑制可动部112A的振动的同时,使可动部112A进行位移。但是,虽然能够减小可动部112A的振动,但是并不能完全地抑制振动。虽然通过从在干扰抑制性上被最优化的控制器140将第二电压信号施加到第二致动器117上,而能够抑制可动部112A的振动,但是直至将镜面间隙G
此外,也可以考虑到如下的情况,即,使用在响应性上被最优化的控制器140,通过向第二致动器117施加的第二电压信号而使振动收敛,从而提高响应性。但是,在该情况下,干扰抑制性降低。也就是说,为了提高响应性,需要控制器140以镜面间隙G
与此相对,在本实施方式中,与向第一致动器116施加比较例的偏置电压信号的情况相比,镜面间隙G
此外,由于通过向第一致动器116施加第一电压信号而能够提高将镜面间隙G
本实施方式的作用效果
本实施方式的分光装置100具备:干涉滤波器110、偏置驱动电路120、间隙检测部130和控制器140。干涉滤波器110具备第一基板111和第二基板112,所述第二基板112隔着间隙而与第一基板111对置。第一基板111具备在表面上设置有第一电容电极113A的第一反射膜114,第二基板112具备在表面上设置有第二电容电极113B的第二反射膜115,第一电容电极113A和第二电容电极113B隔着镜面间隙G
此外,干涉滤波器110具备第一致动器116和第二致动器117。第一致动器116与偏置驱动电路120连接并被输入有第一电压信号。第二致动器117与控制器140连接并被输入有第二电压信号。
偏置驱动电路120作为第一电压信号而输出如下电压信号,所述电压信号为,在从施加开始定时起至经过稳定化时间ta之前的电压转换期间T
在这样的结构中,通过在电压转换期间T
在本实施方式的分光装置100中,第一致动器116为具备被设置于第一基板111上的第一电极116A、和被设置于第二基板112上并隔着第一致动器间隙G
在这样的结构中,能够以在第一基板111以及第二基板112的相互对置的面上仅形成电极的简单的结构而构成致动器,并实现干涉滤波器110的结构的简化。此外,在静电致动器中,由于静电引力相对于电极间的间隙的尺寸而成反比例,因此第一基板111与第二基板112之间的尺寸越小,控制越困难。与此相对,在本实施方式中,通过向第一致动器116施加包括偏置电压在内的第一电压信号,并向第二致动器117施加包括控制电压在内的第二电压信号,从而能够高精度地对第一基板111与第二基板112之间的尺寸进行控制。
在本实施方式的分光装置100中,偏置驱动电路120将小于由式(1)表示的最大偏置电压V
由式(1)表示的最大偏置电压V
在本实施方式中,第一电压信号包括在电压转换期间T
由此,即使在通过过冲信号被施加到第一致动器116上而使可动部112A进行了振动的情况下,也可以对该振动进行抑制的方式而对第一致动器116中的静电引力进行控制。由此,能够更加提高分光装置100的响应性,并能够使所期望的目标波长的光迅速地从干涉滤波器110中透过。
变形例
另外,本发明并未被限定于前述的实施方式,能够实现本发明的目的的范围内的变形、改良等也被包含在本发明中。
变形例一
虽然在上述实施方式中,作为第一电压信号而例示了如图2所示那样的模拟信号,但并未被限定于此。
图6为,表示变形例一所涉及的第一电压信号的信号波形的一个示例的图。偏置驱动电路120也可以作为第一电压信号而输出如图6所示那样的数字信号(矩形波)。即使在这种情况下,也能够与上述实施方式同样地使分光装置100的响应性和干扰抑制性共存。
变形例二
虽然在上述实施方式中,作为第一致动器116以及第二致动器117而例示了静电致动器,但并未被限定于此。例如,也可以设为如下结构,即,第一致动器116以及第二致动器117通过对压电体施加电压,从而使压电体位移,进而使作为第一部件的第一基板111与作为第二部件的第二基板112之间的间隙发生变化的结构。此外,也可以设为利用电机的驱动力而使间隙发生变化的结构,也可以设为利用空气压力等流体压力而使间隙发生变化的结构等。
变形例三
虽然在上述实施方式中,示出了在偏置驱动电路120向第一致动器116施加第一电压信号的同时,实施由控制器140实施的基于间隙检测部130的检测值的反馈控制的示例,但并未被限定于此。例如,控制器140也以在经过稳定化时间ta后,在电压维持期间T
变形例四
虽然在上述实施方式中,作为致动器驱动装置而例示了分光装置100,但并未被限定于此。
作为致动器驱动装置,对于具有隔着间隙而对置配置的第一部件以及第二部件并通过第一致动器以及第二致动器而对间隙的尺寸进行变更的任何装置而言,也均能够适用。
作为这样的致动器驱动装置,例如,能够例示出微镜装置(Mirror Device)等MEMS元件或硬盘驱动器等。
在将本发明应用于微镜装置的情况下,微镜装置采用作为第一部件的基板、和作为第二部件的微镜部隔着间隙而被对置配置的结构,而且,在微镜装置中,设置了对基板与微镜部之间的间隙进行检测的间隙传感器、使基板与微镜部之间的间隙发生变化的第一致动器以及第二致动器。而且,在将基板与微镜部的间隙尺寸设定为所期望的目标值时,向第一致动器施加在电压转换期间T
此外,在将本发明应用于硬盘驱动器中的情况下,采用如下结构,即,硬盘驱动器具备作为第一部件的磁盘、作为第二部件的磁头、使磁盘与磁头之间的尺寸发生变化的第一致动器以及第二致动器、和对磁硬盘与磁头的间隙进行检测的间隙传感器的结构。而且,向第一致动器施加第一电压信号,向第二致动器施加基于间隙传感器的检测值的反馈控制电压即第二电压信号。由此,能够实现硬盘驱动器中的响应性和干扰抑制性的并存。
本发明的总结
第一方式所涉及的致动器驱动装置的特征在于,具备:第一部件;第二部件,其隔着间隙而与所述第一部件对置;间隙传感器,其对所述间隙的尺寸进行检测;第一致动器,其通过被输入有第一电压信号,从而使所述间隙的尺寸发生变化;第二致动器,其通过被输入有第二电压信号,从而使所述间隙的尺寸发生变化,所述第一电压信号为,在经过预定时间之后成为固定的偏置电压、且在经过所述预定时间之前包含有大于所述偏置电压的过冲信号的电压信号,所述第二电压信号为,以使由所述间隙传感器所检测出的检测值接近目标值的方式被反馈控制的电压信号。
以此方式,通过向第一致动器施加包括过冲信号在内的第一电压信号,从而能够迅速地使第一部件与第二部件之间的间隙的尺寸接近目标值,并能够提高响应性。此外,由于能够通过向第一致动器施加第一电压信号而提高响应性,因此能够将向第二致动器施加的第二电压信号设为在干扰抑制性上最优化的电压信号。由此,能够使致动器驱动装置的响应性和干扰抑制性共存。
在本方式的致动器驱动装置中,优选为,所述第一致动器为,具备被设置在所述第一部件上的第一电极、和被设置在所述第二部件上并与所述第一电极对置的第二电极的静电致动器,所述第二致动器为,具备被设置在所述第一部件上的第三电极、和被设置在所述第二部件上并与所述第三电极对置的第四电极的静电致动器,所述第一致动器以及所述第二致动器通过使所述第二部件朝向所述第一部件挠曲,从而使所述间隙的尺寸发生变化。
以此方式,通过由静电致动器构成第一致动器以及第二致动器,从而实现了致动器驱动装置的结构的简化。
在本方式的致动器驱动装置中,优选为,在将所述第二部件的弹簧系数设为K
所述式(1)为,
由式(1)所表示的最大偏置电压V
在本方式的致动器驱动装置中,优选为,在经过所述预定时间之前被输出的所述第一电压信号具有根据所述第二部件的固有周期而被设定的、对所述第二部件的固有振动进行抵消的信号波形。
由此,即使在通过第一致动器而使第二部件位移从而在第二部件上产生了固有振动的情况下,被施加有第一电压信号的第一致动器也能够以抵消第二部件的固有振动的方式而产生应力,并能够使第二部件的振动迅速收敛。
在本方式的致动器驱动装置中,优选为,所述第一部件在与所述第二部件对置的面上具备第一反射膜,所述第二部件在与所述第一部件对置的面上具备与所述第一反射膜对置的第二反射膜。
在本方式中,能够使致动器驱动装置作为法布里-珀罗标准具(干涉滤波器)而发挥功能。在这样的法布里-珀罗标准具中,为了从入射光中透射或反射目标波长的光,而需要高精度地对第一反射膜与第二反射膜之间的间隙进行控制,并且还需要通过干扰振动来抑制间隙的变动。相对于此,在本方式中,能够以较高的响应性且精度良好地对法布里-珀罗标准具的反射膜间的间隙进行控制,并且,也能够提高干扰抑制性。
第二方式所涉及的致动器驱动装置的控制方法为如下的致动器驱动装置的控制方法,所述致动器驱动装置具备:第一部件;第二部件,其隔着间隙而与所述第一部件对置;间隙传感器,其对所述间隙的尺寸进行检测;第一致动器,其通过被输入有第一电压信号,从而使所述间隙的尺寸发生变化;第二致动器,其通过被输入有第二电压信号,从而使所述间隙的尺寸发生变化,在所述致动器驱动装置的控制方法中,实施如下工序,即:向所述第一致动器施加所述第一电压信号的第一电压施加工序;向所述第二致动器施加所述第二电压信号的第二电压施加工序,在所述第一电压施加工序中被施加的所述第一电压信号为,在经过预定时间之后成为固定的偏置电压、且在经过所述预定时间之前包含有大于所述偏置电压的过冲信号的电压信号,在所述第二电压施加工序中被施加的所述第二电压信号为,以使由所述间隙传感器所检测出的检测值接近目标值的方式被反馈控制的电压信号。
由此,与第一方式同样地,通过向第一致动器施加包括过冲信号在内的第一电压信号,从而能够使第一部件与第二部件之间的间隙的尺寸迅速接近目标值,并能够提高响应性。此外,由于能够通过向第一致动器施加第一电压信号而提高响应性,因此能够将向第二致动器施加的第二电压信号设为在干扰抑制性上最优化的电压信号。由此,能够使致动器驱动装置的响应性和干扰抑制性共存。
符号说明
100…分光装置(致动器驱动装置);110…干涉滤波器;111…第一基板;111A…第一凹部;111B…第二凹部;112…第二基板;112A…可动部;112B…隔膜部;113A…第一电容电极;113B…第二电容电极;114…第一反射膜;115…第二反射膜;116…第一致动器;116A…第一电极;116B…第二电极;117…第二致动器;117A…第三电极;117B…第四电极;120…偏置驱动电路;130…间隙检测部;140…控制器;150…微型计算机;G
- 使得能够从振动型致动器获得稳定输出的驱动控制设备和驱动控制方法、包括振动型致动器的振动型驱动设备和装置
- 致动器驱动装置、以及致动器驱动装置的控制方法