一种智慧农业大棚控制系统及控制方法
文献发布时间:2023-06-19 11:08:20
技术领域
一种智慧农业大棚控制系统及控制方法,用于果树生长环境定位监测,属于监测装置技术领域。
背景技术
果树是指果实可食的树木,能提供可供食用的果实、种子的多年生植物及其砧木的总称。如苹果树,梨树,柑橘树,杏树,桃树等等。
由于人们对生活中水果的需求量变大,果树种植面积越来越大,而大部分果树对于自然气候的依赖性都很大,且每棵果树所占面积都非常的大,现有技术中,通常通过人为巡检的方式对果树进行生长环境检测,但存在如下问题:
采用人工的方式费时费力,所巡检的范围通常只限于树下,从而易造成监测不全面、不准确,易造成对果树维护不当的问题。
现有技术中CN201720458335.7,公开了一种基于物联网的果树生长环境监测装置,包括连接外壳,所述连接外壳的左右两端设有对应的通孔,该通孔内贯穿设有拉线,所述连接外壳的内部设有两个导辊,导辊位于拉线的两侧,并且导辊的两端通过轴承分别于连接外壳上下面连接,所述连接外壳的下表面一侧通过螺栓连接有电机,电机的输出轴贯穿连接外壳下表面,通过电机可以带动装置在拉线移动,以此可以对不同位置的环境进行监测,通过电动伸缩杆可以装置上下移动,检测更加全面,该基于物联网的果树生长环境监测装置结构简单,操作简便,对环境监测的更加全面,并且可以对不同位置的环境检测,而且可以进行远程的监测。但存在如下技术问题:
一、虽然能测量X轴和Y轴上的环境信息,但无法测量Z轴上的环境信息;
二、无法测量果树所处位置周围中的土壤信息;
综上所述,上述技术同样容易造成对环境信息监测不全面、不准确的问题。
发明内容
本发明的目的在于提供一种智慧农业大棚控制系统及控制方法,解决现有技术中对果树周围的环境信息监测不全面、不准确的问题。
为了实现上述目的,本发明采用的技术方案为:
一种智慧农业大棚控制系统,包括用户控制端、用于对大棚内种植的果树进行信息采集的信息采集端和实现用户控制端和信息采集端信息交互的网络单元;
所述信息采集端包括在果树区域的相对边缘上设置的支架,设置在相对边缘的支架上相平行的两条第一轨道,设置在两条第一轨道上、与第一轨道滑动配合的第一驱动机构,设置在两第一驱动机构上的第二轨道,设置在第二轨道上、与第二轨道滑动配合的纵向伸缩机构,设置在纵向伸缩机构上、用于测量果树周围的X轴、Y轴、Z轴的环境信息的传感器组;
所述纵向伸缩机构上设置有定位纵向伸缩机构位置的定位模块;
所述用户控制端控制第一驱动机构和纵向伸缩机构对果树的四周进行信息采集,并接收传感器组采集的数据信息。
进一步,所述第一驱动机构包括与第一轨道滑动配合的第一滑轮,设置在第一滑轮上的安装板,设置在安装板上驱动第一滑轮移动的第一驱动电机;
所述纵向伸缩机构包括与第二轨道滑动配合的第二驱动机构、设置在第二驱动机构上、用于驱动传感器测量果树下周的环境信息的第一液压伸缩机构,和设置在第二驱动机构上、用于驱动传感器测量果树上周的环境信息的第二液压伸缩机构;
所述第二驱动机构包括与第二轨道滑动配合的第二滑轮,设置在第二滑轮上的安装架,设置在安装架上驱动第二滑轮移动的第二驱动电机;
所述第一液压伸缩机构包括设置在安装架上的一第一液压杆和控制第一液压杆伸缩的第一液压气缸;或包括设置在安装架上的两根以上、不同长度的液压杆和控制各液压杆伸缩的液压气缸,其中,任一长液压杆的伸缩杆的长度与另一短液压杆的套筒的长度相同;
所述第二液压伸缩机构包括设置在安装架上的一第二液压杆和控制第二液压杆伸缩的第二液压气缸,其中,第二液压杆的伸缩杆的长度与第一液压伸缩机构中第一液压杆或最短液压杆中套筒的长度相同。
进一步,所述传感器组包括设置在第一液压杆或液压杆的伸缩杆上的第一传感器组和设置在第二液压杆上的第二传感器组。
进一步,所述第一传感器组和第二传感器组都包括温度传感器、湿度传感器、光照强度传感器和二氧化碳浓度传感器。
进一步,所述第一传感器组还包括土壤酸碱度传感器和土壤墒情传感器,所述土壤酸碱度传感器和土壤墒情传感器设置在第一液压伸缩机构的伸缩杆的端部。
进一步,所述安装架上设置有一支杆,在支杆上设置有用于清洁土壤酸碱度传感器和土壤墒情传感器的探头的清洁刷。
进一步,设置清洁刷一端、支杆为软性材质;或支架包括设置在安装架上的套管;设置在套管内的收缩杆,所述套管与收缩杆之间通过施力收紧、释放复位的复位弹性结构相连接。
进一步,所述定位模块设置在安装架上,所述安装架包括设置在第二滑轮上的下安装板,设置在下安装板的支柱,设置在支柱上的上安装板,所述第一液压伸缩机构和支杆设置在下安装板上,所述第二液压伸缩机构设置在下安装板和上安装板上。
进一步,所述下安装板的底部设置有、用于感应与障碍物的距离的第一高度传感器和第二高度传感器;
所述第一高度传感器设置在第一液压杆或液压杆周围的下安装板上;
所述第二高度传感器设置在第二液压杆周围的下安装板上;
所述安装架上还设置有存储第一液压杆或液压杆完全收缩状态时的长度、第二液压杆完全收缩状态时的长度、第一高度传感器和第二高度传感器分别与地面距离的范围值的存储单元;
所述下安装板上还设置有、用于计算第一高度传感器感应的距离减去第一液压杆或液压杆完全收缩状态时的长度的第一计算单元,和上安装板上设置有、用于计算第二高度传感器感应的高度距离减去第二液压杆完全收缩状态时的长度的第二计算单元;
所述第一计算单元与第一液压气缸或液压气缸相连接,若第一高度传感器监测的结果小于第一高度传感器与地面距离的范围值,第一液压气缸或液压气缸驱动第一液压杆或液压杆在第一计算单元计算的结果内伸缩;否则,不受第一计算单元计算的结果的限制;
所述第二计算单元与第二液压气缸相连接,若第二高度传感器监测的结果小于第二高度传感器与地面距离的范围值,第二液压气缸驱动第二液压杆在第二计算单元计算的结果内伸缩;否则,不受第二计算单元计算的结果的限制。
一种智慧农业大棚控制方法,包括如下步骤:
S1、基于实现信息交互的网络单元,用户控制端发出控制指令,控制信息采集端38中的第一驱动机构在第一轨道上实现X轴位移,并控制纵向伸缩机构在第二轨道上实现Z轴位移;
S2、基于纵向伸缩机构测量的位移距离,纵向伸缩机构实现Y轴位移,以通过传感器组对果树的四周进行信息采集,传感器组将采集的数据信息反馈给用户控制端。
与现有技术相比,本发明的优点在于:
一、本发明通过用户控制端控制信息采集端进行环境数据采集,可实现对果树周围的生长环境进行全方位的监测,并能向用户提供准确的监测信息,而且通过设置定位模块可快速追踪因生长环境不良需要进行维护的果树,以便快速维护相应的果树,让果树产量提高;
二、本发明通过设置第一液压伸缩机构和第二液压伸缩机构可全方位的监测果树高度方向的环境信息,可防止设置一个液压机构,液压杆的套筒部分对应的果树的环境信息不能被监测;
三、本发明可根据果树的高度,将第一液压伸缩机构选用为一根第一液压杆或多根液压杆,防止第二液压杆过长,不易安装等问题;
四、本发明通过在第一液压伸缩机构和第二液压伸缩机构上设置多个传感器,可一次性在同一位置上测量果树当前的多种环境信息;
五、本发明通过在第一液压伸缩机构的伸缩杆的端部设置土壤酸碱度传感器和土壤墒情传感器,能通过第一液压伸缩机构的伸缩杆伸长,将其插入土壤中,实现对土壤信息的采集,进一步完善果树生长环境信息的全方位采集;
六、本发明设置支杆和清洁刷,可对插入土壤中的土壤酸碱度传感器和土壤墒情传感器进行清理,防止附着泥土,影响下一位置上的土壤信息采集不准确的问题;
七、本发明中的支杆在设置清洁刷一端为软性材质或由套管、收缩杆和复位弹性结构组成,其目的是为了防止地面不平,支杆底部受力,容易造成支杆变更或折断等情况,还可起到清洁清洁刷的作用;
八、本发明的安装架结构简单,且能轻松将各部件进行固定;
九、本发明通过在安装架上设置第一高度传感器、第一计算单元、第二高度传感器和第二计算单元,并通过第一计算单元和第二计算单元计算的结果来控制第一液压气缸或液压气缸或第二液压气缸,从而控制第一液压杆或液压杆或第二液压杆的伸长长度,可防止碰撞到果树,损坏果树。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应该看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
图1为本发明的框架示意图;
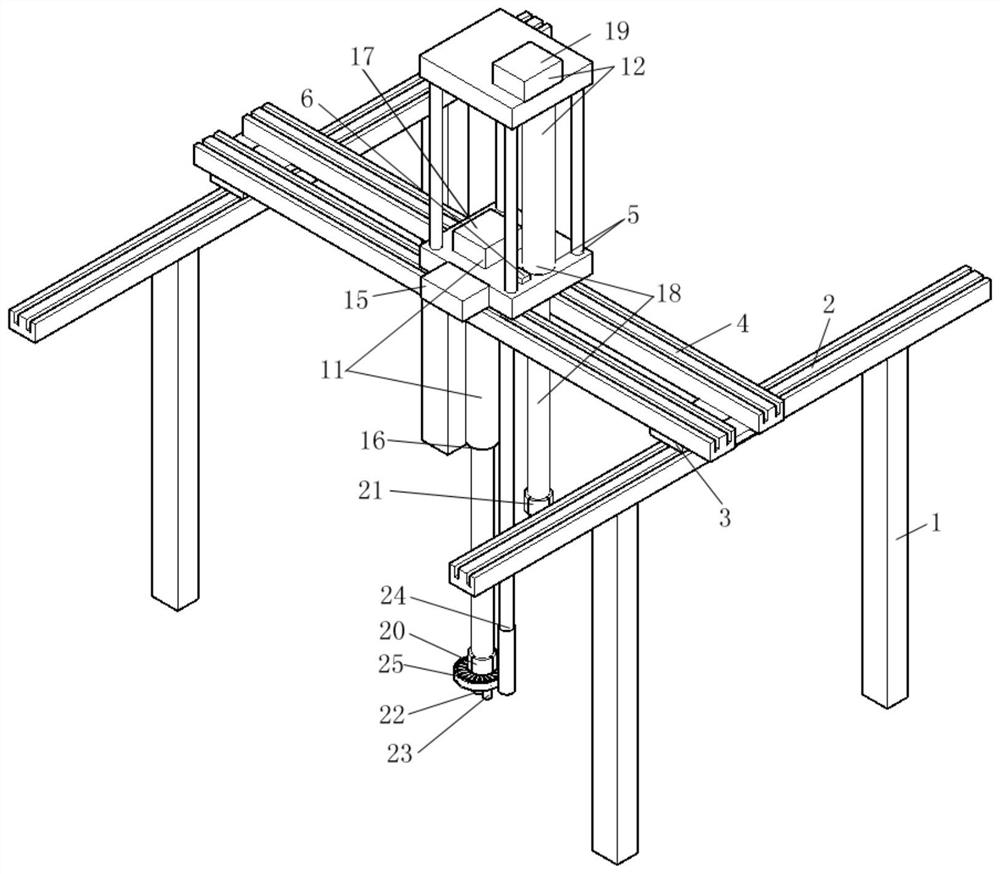
图2为本发明中信息采集端的结构示意图;
图3为本发明中第一驱动机构的示意图;
图4为本发明中第二驱动机构的示意图;
图5为本发明中套管、收缩杆和复位弹性结构组成的支杆的剖视图;
图6为本发明中清洁刷的示意图;
图7为本发明中第二驱动机构上设置各部件的示意图;
图中:1-支架、2-第一轨道、3-第一驱动机构、4-第二轨道、5-纵向伸缩机构、6-定位模块、7-第一滑轮、8-安装板、9-第一驱动电机、10-第二驱动机构、11-第一液压伸缩机构、12-第二液压伸缩机构、13-第二滑轮、14-安装架、15-第二驱动电机、16-第一液压杆、17-第一液压气缸、18-第二液压杆、19-第二液压气缸、20-第一传感器组、21-第二传感器组、22-土壤酸碱度传感器、23-土壤墒情传感器、24-支杆、25-清洁刷、26-套管、27-收缩杆、28-复位弹性结构、29-下安装板、30-支柱、31-上安装板、32-第一高度传感器、33-第二高度传感器、34-第一计算单元、35-第二计算单元、36-用户控制端、37-网络单元、38-信息采集端。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
在本发明的描述中,需要说明的是,若出现术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,若出现术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
此外,若出现术语“水平”、“竖直”、“悬垂”等并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,若出现术语“设置”、“安装”、“相连”、“连接”等应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
需要说明的是,在不冲突的情况下,本发明的实施例中的特征可以相互结合。
实施例1
为了解决现有技术中对果树周围的环境信息监测不全面、不准确的问题。如图1、2所示,提供了一种智慧农业大棚控制系统,包括用户控制端36、用于对大棚内种植的果树进行信息采集的信息采集端38和实现用户控制端36和信息采集端38信息交互的网络单元37;
所述信息采集端38包括在果树区域的相对边缘上设置的支架1,设置在相对边缘的支架1上相平行的两条第一轨道2,设置在两条第一轨道2上、与第一轨道2滑动配合的第一驱动机构3,设置在两第一驱动机构3上的第二轨道4,设置在第二轨道4上、与第二轨道4滑动配合的纵向伸缩机构5,设置在纵向伸缩机构5上、用于测量果树周围的X轴、Y轴、Z轴的环境信息的传感器组;所述纵向伸缩机构5上设置有定位纵向伸缩机构5位置的定位模块6。
所述用户控制端控制第一驱动机构3和纵向伸缩机构5对果树的四周进行信息采集,并接收传感器组采集的数据信息
其中,第二轨道至少为一条,在本实施例中,第二轨道设置为两条;而本实施例中的纵向伸缩机构5既然能与第二轨道4滑动配合,即纵向伸缩机构5不仅能实现纵向伸缩,还能在第二轨道移动。
实践中,将信息采集端38安装在大棚的某一区域或整个大棚中,通过用户控制端控制第一驱动机构3驱动第二轨道4和纵向伸缩机构5在第一轨道上滑动,通过纵向伸缩机构5中的驱动机构(即后续内容中所述的第二驱动机构)驱动,使得纵向伸缩机构5在第二轨道上滑动,同时通过纵向伸缩机构5的伸缩机构(即后续内容中所述的第一液压伸缩机构11和第二液压伸缩机构12)带动传感器组纵向移动,可实现对各果树的全面监测和准确监测。而通过设置定位模块可快速追踪因生长环境不良需要进行维护的果树,以便快速维护相应的果树,让果树产量提高。
实施例2
在实施例1的基础上,如图2-4所示,所述第一驱动机构3包括与第一轨道2滑动配合的第一滑轮7,设置在第一滑轮7上的安装板8,设置在安装板8上驱动第一滑轮7移动的第一驱动电机9。对于各部件的具体设置,在此不作过多阐述,为现有的连接方式,当然,不排除第一驱动机构3还可为其它结构的情况。其中,第一驱动电机为现有的,可实现往返驱动,以驱动第二轨道在第一轨道上往返。
所述纵向伸缩机构5包括与第二轨道4滑动配合的第二驱动机构10、设置在第二驱动机构10上、用于驱动传感器(指传感器组中的传感器)测量果树下周的环境信息的第一液压伸缩机构11,和设置在第二驱动机构10上、用于驱动传感器(指传感器组中的传感器)测量果树上周的环境信息的第二液压伸缩机构12。通过设置第一液压伸缩机构和第二液压伸缩机构可全方位的监测果树高度方向的环境信息,可防止设置一个液压机构,液压杆的套筒部分对应的果树的环境信息不能被监测。
所述第二驱动机构10包括与第二轨道4滑动配合的第二滑轮13,设置在第二滑轮13上的安装架14,设置在安装架14上驱动第二滑轮13移动的第二驱动电机15;对于各部件的具体设置,在此不作过多阐述,为现有的连接方式,当然,不排除第二驱动机构10还可为其它结构的情况。其中,第二驱动电机为现有的,可实现往返驱动,以驱动纵向伸缩机构在第二轨道上往返。
如图2所示,所述第一液压伸缩机构11包括设置在安装架上的一第一液压杆16和控制第一液压杆16伸缩的第一液压气缸17;或包括设置在安装架上的两根以上、不同长度的液压杆和控制各液压杆伸缩的液压气缸,其中,任一长液压杆的伸缩杆的长度与另一短液压杆的套筒的长度相同,图中未表示出来;
所述第二液压伸缩机构12包括设置在安装架上的一第二液压杆18和控制第二液压杆18伸缩的第二液压气缸19,其中,第二液压杆18的伸缩杆的长度与第一液压伸缩机构11中第一液压杆16或最短液压杆(指设置为两根以上、不同长度的液压杆的情况下的最短液压杆)中套筒的长度相同。
第一驱动机构3接受指令驱动第二轨道4和纵向伸缩机构5到指定位置后,第二驱动机构10驱动第一液压伸缩机构11和第二液压伸缩机构12到指定位置,再通过第一液压气缸17驱动第一液压杆16伸长,第二液压气缸19驱动第二液压杆18伸长,即可通过第一液压杆16和第二液压杆18带动传感器组纵向移动,实现对各果树的全面监测和准确监测。
实施例3
在实施例2的基础上,如图2所示,所述传感器组包括设置在第一液压杆16或液压杆的伸缩杆上的第一传感器组20和设置在第二液压杆18上的第二传感器组21。所述第一传感器组20和第二传感器组21都包括温度传感器、湿度传感器、光照强度传感器和二氧化碳浓度传感器,当然,还可包括其它传感器,在实践过程中,根据需要进行设置。所述第一传感器组20还包括土壤酸碱度传感器22和土壤墒情传感器23,所述土壤酸碱度传感器22和土壤墒情传感器23设置在第一液压伸缩机构16的伸缩杆的端部。在第一液压伸缩机构的伸缩杆的端部设置土壤酸碱度传感器和土壤墒情传感器,能通过第一液压伸缩机构的伸缩杆伸长,将其插入土壤中,实现对土壤信息的采集,进一步完善果树生长环境信息的全方位采集。
实施例4
在实施例3的基础上,如图2、6所示,所述安装架14上设置有一支杆24,在支杆24上设置有用于清洁土壤酸碱度传感器22和土壤墒情传感器23的探头的清洁刷25。支杆和清洁刷,可对插入土壤中的土壤酸碱度传感器和土壤墒情传感器进行清理,防止附着泥土,影响下一位置上的土壤信息采集不准确的问题。
实施例5
在实施例4的基础上,如图2所示,设置清洁刷25一端、支杆24为软性材质,如橡胶材质;或如图5所示,支架24包括设置在安装架14上的套管26;设置在套管26内的收缩杆27,所述套管26与收缩杆27之间通过施力收紧、释放复位的复位弹性结构28相连接,复位弹性结构可为复位弹簧,也可为泡沫等。上述两种支杆的设置方式,其目的是为了防止地面不平,支杆底部受力,容易造成支杆变更或折断等情况。由于橡胶材质和复位弹性结构28都具有一定的弹性,在支杆受力时,可通过支杆回弹实现清洁刷摇摆来清理清洁刷上的灰尘或泥土。
实施例6
在实施例5的基础上,所述定位模块6设置在安装架14上,所述安装架14为包括设置在第二滑轮13上的下安装板29,设置在下安装板29上的支柱30,设置在支柱30上的上安装板31,所述第一液压伸缩机构11和支杆24设置在下安装板上,所述第二液压伸缩机构11设置在下安装板29和上安装板31上,定位模块6可设置安装架的任意一位置上,本实施例的安装架结构简单,便于设置各部件,当然不排除,安装架14还可为其它结构的情况。在某些实施例中,定位模块6也可设置在第一液压伸缩机构11或第二液压伸缩机构12上。
实施例7
在实施例6的基础上,如图2、7所示,所述下安装板29的底部设置有、用于感应与障碍物的距离的第一高度传感器32和第二高度传感器33;所述第一高度传感器32设置在第一液压杆16或液压杆周围的下安装板29上;所述第二高度传感器33设置在第二液压杆18周围的下安装板29上;所述安装架上还设置有存储第一液压杆16或液压杆完全收缩状态时的长度、第二液压杆18完全收缩状态时的长度、第一高度传感器32和第二高度传感器33分别与地面距离的范围值的存储单元(图中未表示出),也可设置在用户控制端;所述下安装板29上还设置有、用于计算第一高度传感器32感应的距离减去第一液压杆16或液压杆完全收缩状态时的长度的第一计算单元34,和上安装板上设置有、用于计算第二高度传感器33感应的高度距离减去第二液压杆18完全收缩状态时的长度的第二计算单元35;所述第一计算单元与第一液压气缸17或液压气缸相连接,若第一高度传感器32监测的结果小于第一高度传感器32与地面距离的范围值,第一液压气缸17或液压气缸驱动第一液压杆16或液压杆在第一计算单元计算的结果内伸缩,即在第一液压杆16或液压杆完全收缩状态时,通过第一计算单元接收第一高度传感器32监测的距离减去调用的存储单元存储的第一液压杆16或液压杆完全收缩状态时的长度,得到对应的计算结果,通过此计算结果控制第一液压杆16或液压杆伸长范围;否则,不受第一计算单元34计算的结果的限制,即代表障碍物为地面,不能限制液压杆16或液压杆伸长的长度,是为了使土壤酸碱度传感器22和土壤墒情传感器23能插入土壤中;所述第二计算单元与第二液压气缸19相连接,若第二高度传感器33监测的结果小于第二高度传感器33与地面距离的范围值,第二液压气缸19驱动第二液压杆18在第二计算单元35计算的结果内伸缩,即在第二液压杆18完全收缩状态时,通过第二计算单元接收第二高度传感器33监测的距离减去调用的存储单元存储的第二液压杆18完全收缩状态时的长度,得到对应的计算结果,通过此计算结果控制第二液压杆18伸长范围;否则,不受第二计算单元35计算的结果的限制。
实施例8
在实施例7的基础上,一种智慧农业大棚控制方法,基于实现信息交互的网络单元37,用户控制端36发出控制指令,控制信息采集端38中的第一驱动机构3在第一轨道上实现X轴位移,并控制纵向伸缩机构5在第二轨道上实现Z轴位移;基于纵向伸缩机构5测量的位移距离,纵向伸缩机构5实现Y轴位移,以通过传感器组对果树的四周进行信息采集,传感器组将采集的数据信息反馈给用户控制端36。
- 一种智慧农业大棚控制系统及控制方法
- 一种智慧城市交通信号灯控制系统及其控制方法