外科器械的连续旋转
文献发布时间:2023-06-19 11:11:32
相关申请的交叉引用
本申请要求2018年10月24日提交的美国临时号62/749,841的优先权。
背景技术
1.技术领域
本发明涉及外科器械,并且更具体地,涉及用于允许外科器械具有可连续旋转360度的电动部件的方法。
2.相关技术描述
外科器械,诸如电外科血管密封器和手术刀,具有定位在细长轴的端部处的钳口或其他器具,使得器具可被容易地应用于要治疗的组织。该器具可为电动的,诸如通过使用由电联接到器具的发电机供应的射频能量。用于将器具联接到发电机的常规方法是使用载流导线。然而,设计了许多类型的外科装置,使得器具可被旋转。虽然有线装置可旋转一定量,但是在某个点处,进一步的旋转将受到在非旋转元件和旋转元件之间延伸的导线的长度的限制。在极端情况下,器具的附加旋转可能导致导线的断开和电气功能的损失。因此,本领域需要一种方法,该方法可向外科装置的电动器具递送电连续性,同时允许用户在不考虑装置的功率损失或损坏的情况下按照他或她认为需要的那样旋转器具。
发明内容
本发明包括连续旋转组件,该连续旋转组件可定位在电外科装置的壳体中,以保持电外科电源和定位在可旋转轴的端部处的电外科器具之间的电连续性。本发明包括具有一对彼此电隔离的环的定子。定子定位在轴周围并固定以防止旋转。具有彼此电隔离的第一组销和第二组销的转子定位在轴周围并且可与其一起旋转。转子包括第一组销和第二组销,该第一组销被定位成与一对环中的一个环接触,该第二组销被定位成与一对环中的另一个环接触。一对导线可以分别联接到一对环,以允许互连到电外科电源。装置的壳体可限定第一肋,该第一肋被定位成与定子处于邻接关系以防止定子的旋转。壳体可以进一步限定第二肋,该第二肋与转子相邻地定位。衬套可被定位在转子和第二肋之间以允许转子更容易地旋转。轴可包括纵向狭槽,该纵向狭槽接合转子的柄脚,使得它们一起旋转。第一组销和第二组销可以是弹簧单高跷销,以确保与环接合。电外科器具可具有第一相对钳口和第二相对钳口,其中第一相对钳口和第二相对钳口中的每一者通过第二对导线中的每一者电联接到第一组销和第二组销中的相应一者。
本发明还包括向电外科装置提供连续旋转的方法。一个步骤涉及将具有彼此电隔离的第一组销和第二组销的转子联接到电外科装置的可旋转轴,使得第一组销被定位成与被固定以防止旋转的定子的一对环中的一个环接触,并且第二组销被定位成与该对环中的另一个环接触。另一个步骤涉及将第一组销和第二组销联接到安装到轴的电外科装置的电外科器具。另外的步骤涉及将定子的一对环联接到电外科电源,使得电外科电源与电外科器具电连续。该方法可另外包括以下步骤:旋转轴以引起转子的旋转,同时定子保持固定,使得由于第一组销和第二组销在轴旋转时保持与该对环接触而保持电外科电源和电外科器具之间的电连续性。
附图说明
通过结合附图阅读以下详细描述,将更全面地理解和领会本发明,其中:
图1是根据本发明的具有电连续性和连续旋转的外科装置的透视图;
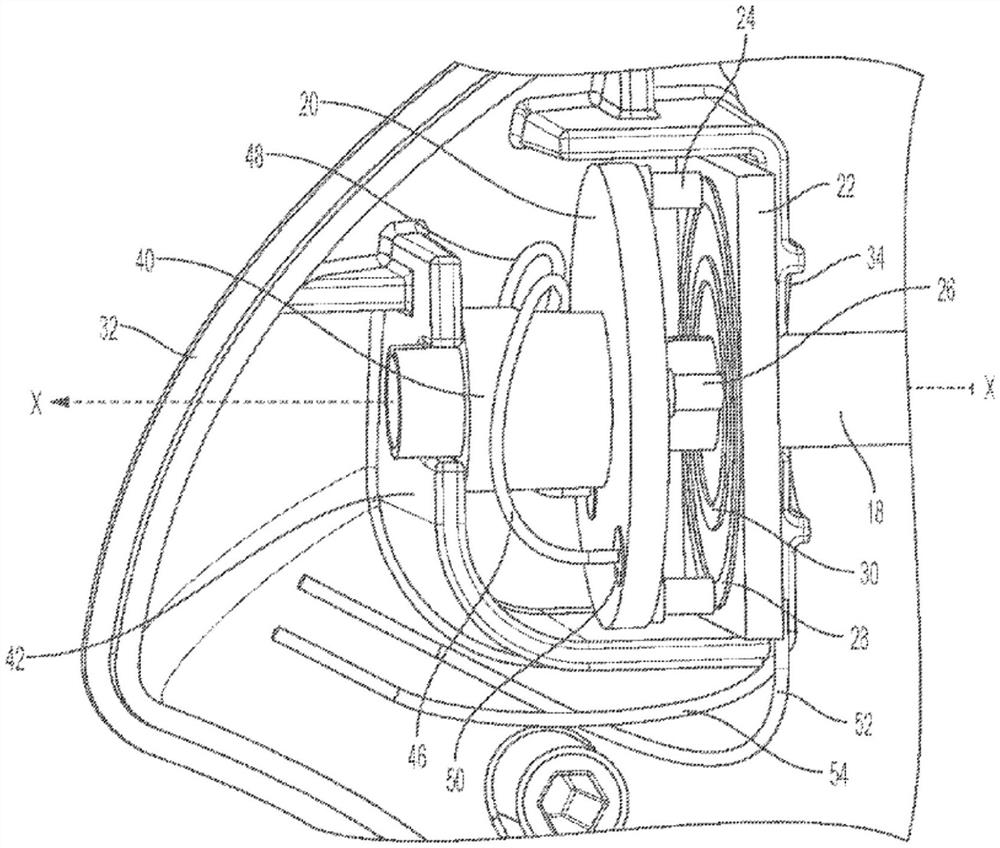
图2是根据本发明的用于在外科装置中提供电连续性和连续旋转的组件的等距视图;
图3是根据本发明的用于在外科装置中提供电连续性和连续旋转的组件的分解图。
具体实施方式
参见附图,其中相同的数字始终是指相同的部件,在图1中看到具有用于向外科器械提供电连续性的连续旋转组件12的外科装置10,该外科器械被示出为在轴18的端部处的一对电外科钳口14,该对电外科钳口联接到电外科电源16,诸如电外科发电机。应当认识到,本发明可结合到具有联接到电外科电源16的源的器具的其他外科装置中,诸如电外科钳、电外科铅笔等。
参见图2,连续旋转组件12包括与定子22保持连续接触的转子20。转子20承载彼此电隔离的第一组导电销24和第二组导电销26。定子22支撑第一环28和第二环30,该第一环和第二环彼此电隔离并且对准以分别与第一组销24和第二组销26配合。例如,第一环28和第二环可围绕轴18同心地定位。定子22诸如通过形成在壳体32内部的第一肋34固定在装置10的壳体32内。转子20联接到装置10的轴18,该轴支撑钳口14以与其一起旋转。例如,轴18可包括狭槽36,该狭槽接纳转子20的柄脚38,并且如果轴18旋转则将旋转力施加到转子20。
如图2所示,第一组销24被定位成与第一环28接触。第二组销26被定位成接触第二环30。第一组销24和第二组销26优选地是具有弹簧加载尖端的弹簧单高跷销,以在转子20相对于定子22的任何旋转期间与第一环28和第二环30保持可靠的电接触。轴承40可被定位成与壳体32内的第二肋42以及与转子20处于邻接关系,以保持转子20与定子22接触,使得在第一销24和第二销26与对应导电环28和30之间保持接触。
第一对导线46和48可分别经由接触垫50联接到第一组销24和第二组销26。导线46和48在轴18内延伸以连接到保持在钳口14内的电极。第一对导线46和48将连同转子20和轴18一起旋转,并且因此不会受到任何关于轴18如何旋转的张力。第二组导线52和54将环28和30中的每一者互连到电外科电源16。结果,电外科电源16电互连到钳口14,诸如用于切割和凝结过程。如果装置10的轴18在电外科手术期间围绕纵向轴线X-X旋转,则转子20将连同轴18一起旋转,而定子22保持静止。在任何旋转期间,转子20的第一组销24和第二组销26将分别保持与环28和30接触。由于定子22固定就位,导线52和54不需要随着轴18的旋转而移动或拉伸,并且因此无论轴18如何旋转,该导线都不会被无意地断开。结果,无论轴18的旋转程度如何,都保持钳口14和电外科电源16之间的电连续性。事实上,轴18可连续旋转,同时仍然保持钳口14和电外科电源16之间的电连接,而不考虑由于断开的导线或电气部件而导致的电连续性的损失。
- 外科器械的连续旋转
- 用于将外科器械的第一部分联接到外科器械的第二部分的旋转支撑接头组件