一种优化同步整流SR关断风险的控制方法
文献发布时间:2023-06-19 11:11:32
技术领域
本发明涉及电子电路技术领域,尤其是涉及一种优化同步整流SR关断风险的控制方法。
背景技术
随着电动汽车的普及,汽车行业对车载DC/DC的安全标准越来越严格,而DC/DC中同步整流MOS管SR关断存在应力大的风险,严重时其应力超过MOS耐压,导致SR损坏影响DC/DC正常工作。
现有的关断SR的方案主要是通过判断DC/DC输出电流小于关断的设定值时关闭SR。由于DC/DC输出电流存在滤波延时、采样延时等,具有一定程度的滞后特性,且DC/DC输出电流不能真实反映倍流电感的大小。抛载时倍流电感电流下降较快,当DC/DC输出电流到达设定的SR关断点时,倍流电感电流可能已经反向,此时关断SR,其应力会很大;若提高SR关断时的DC/DC输出电流点,则会降低DC/DC的效率。
发明内容
本发明是为了克服现有技术的由于DC/DC输出电流无法真实反映倍流电感的大小导致当设定电流达到SR关断点时电流已经反向应力很大的问题,提供一种优化同步整流SR关断风险的控制方法,能以更快的速度在倍流电感电流反向前关断SR,特别是在DC/DC重载情况下,以大速率抛载时,能明显减小SR关断时的应力。
为了实现上述目的,本发明采用以下技术方案:
一种优化同步整流SR关断风险的控制方法,包括如下步骤:
步骤1:判断SR是否已经开通,若SR已经开通进行步骤2;
步骤2:当抛载后负载电流都加在输出电容上,根据电容电压计算公式:
Vcap为电压,C为电容,I为电流,电容两端电压会快速上升,形成电压过冲,根据该特征采样得到输出电压Vout,同时采样得到当前的输入电压Vin,只要SR开通,该步骤一直执行;
步骤3:根据CCM下,DCDC的输出电压与输入电压满足如下公式:
其中D为开关管的占空比,T为开关周期;
将步骤2得到的Vin、Vout以及开关周期T代入上式,本步骤中为抛载动态下的输出电压,可以得到一个与过充电压对应的占空比Dc,即:
步骤4:获取当前实际作用于MOS的占空比Da;
步骤5:比较步骤3得到的Dc与步骤4得到的Da,根据判断条件完成SR的关断判断;
步骤5中判断条件为:
(Dc–Da) > K*Dc
式中K为关断系数,K的取值范围为区间[0,0.2],决定SR关断的灵敏度,当K越大,越难满足关断条件,关断灵敏度越低;K越小,越容易满足关断条件,灵敏度越高;
若上式成立,判定属于抛载工况,立即关断SR;
若上式不成立,则SR无动作。
当K=0,即(Dc–Da) > 0,取下限即Dc–Da = 0,说明输出电压无波动,当前为稳态;当K=0.2,取(Dc–Da) > 0.2*Da,取下限即(Dc–Da) = 0.2*Dc,说明输出电压波动达到了20%,即K的大小反映了输出电压波动的程度,在取值范围内当K取0.2,即要求输出电压波动达到20%以上才关断SR;当K取值为0,即要求输出电压波动在0以上即可关断SR。
作为优选,步骤1中判断SR的条件是状态标志是否置位SRFlag == ON。
作为优选,步骤3中Dc用于与步骤4获取的Da比较,所述步骤4中实际作用于MOS的占空比获取方式根据DCDC采取的控制方式种类分类包括两种,所述DCDC的控制方式包括电压控制和峰值电流控制,采用电压控制时DCDC拓扑为半桥拓扑,采用峰值电流控制时DCDC拓扑为全桥拓扑。
作为优选,电压控制方式中Da的获取由电压控制环计算得到,计算公式与步骤3一致,电压控制方式中的Da获取时采用的是稳态工作下的Vout值。
作为优选,峰值电流控制方式中开关管的关断是由输入电流决定的,调制信号与原边电流的比较通过MCU的片内模块实现,产生关断信号时,通过配置Pwm3Regs.DCCAPCTL.bit.CAPE = 1,使能捕获功能,在PWM模块产生关断信号同时捕获TBCTN的值T2,再与起始时刻T1比较,每周期固定的开通时刻T1是已知的,计算(T2-T1)即为当前实际的占空比Da。
MCU具体型号为TMS320f280049,配置寄存器DCCAPCTL的CAPE位,置位CAPE位具体为DCCAPCTL.bit.CAPE = 1。
因此,本发明具有如下有益效果:
本发明通过抛载后实时检测的DCDC输出电压、输入电压计算出对应的理论驱动信号的占空比,与当前实际驱动信号的占空比相比较,当理论占空比与实际占空比误差达到设定程度时立即关断SR,相比根据DCDC输出电流关断SR的方案,本发明能以更快的速度在倍流电感电流反向前关断SR,特别是在DCDC重载情况下,以大速率抛载时,该方案能明显减小SR关断时的应力。
附图说明
图1是本实施例应用的全桥倍流整流拓扑。
图2是本实施例应用的半桥倍流整流拓扑。
图3是本实施例DC/DC带载运行负载电流路径示意图。
图4是本实施例DC/DC抛载运行负载电流路径示意图。
图5是本实施例DC/DC倍流电感电流正向示意图。
图6是本实施例DC/DC倍流电感电流反向示意图。
图7是本实施例电感CCM模式示意图。
图8是本实施例峰值电流控制模式占空比生成示意图。
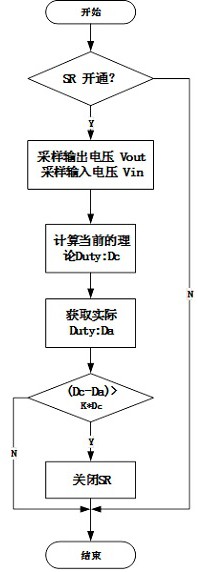
图9是本实施例的流程图。
具体实施方式
下面结合附图与具体实施方式对本发明做进一步的描述。
实施例:
本实施例提供了一种优化同步整流SR关断风险的控制方法,主要应用在车载DC/DC,首先介绍车载DC/DC的拓扑,DC/DC拓扑分为两种:如图1所示为全桥倍流整流,Q1-Q4为原边MOS,SR1和SR2为副边MOS,L1、L2为倍流电感,CO为输出电容。其中Vin为DC/DC输入电压,Vout为DC/DC输出电压,T:1为变压器原副边匝比;如图2所示为半桥倍流整流,只是将全桥的Q3、Q4分别替换成电容C1、C2,两种拓扑的控制方式不一样,全桥采用峰值电流控制,半桥采用电压控制方式,本发明的具体实施步骤在两种控制方式上会略有差别。
本实施例的主要应用的场景:DC/DC抛载。当DC/DC带负载运行时,如图3所示,以全桥拓扑举例,半桥情况完全一致,形成负载电流Iload;当DC/DC带载稳定运行突然抛载时,如图4,负载电流直接加到输出电容,在抛载过程中倍流电感电流会持续下降,电感电流大于零时即电流流向为正,如图5所示,当下降到为零时电感电流会反向,如图6所示,当SR1开通时,电感的反向电流会经过SR1形成流通路径,但是当SR1关断时,电感反向电流会给SR1的结电容充电,导致SR1应力很高,会损坏SR1,所以抛载后要在电感电流反向之前关断SR1;当SR2开通时,电感的反向电流会经过SR2形成流通路径,但是当SR2关断时,电感反向电流会给SR2的结电容充电,导致SR2应力很高,会损坏SR2,所以抛载后要在电感电流反向之前关断SR2。
如图9所示,本实施例具体包括以下步骤:
步骤1:判断SR是否已经开通,判断SR的条件是状态标志是否置位SRFlag == ON,若SR已经开通进行步骤2;
步骤2:当抛载后负载电流都加在输出电容上,根据电容电压计算公式:
Vcap为电压,C为电容,I为电流,电容两端电压会快速上升,形成电压过冲,根据该特征采样得到输出电压Vout,同时采样得到当前的输入电压Vin,只要SR开通,该步骤一直执行。
步骤3:根据CCM下,DCDC的输出电压与输入电压满足如下公式:
其中D为开关管的占空比,T为开关周期;
将步骤2得到的Vin、Vout以及开关周期T代入上式,本步骤中为抛载动态下的输出电压,可以得到一个与过充电压对应的占空比Dc,即:
CCM:在开关管的每个开关周期内若电感电流一直大于零如图7所示,在抛载过程中电感电流为零之前设定为CCM。
步骤4:获取当前实际作用于MOS的占空比Da;
根据控制方式的不同,获取占空比的方式也不一样,DCDC主要采用了两种控制方式:1.电压控制、2.峰值电流控制;
实际作用于MOS的占空比获取方式根据DCDC采取的控制方式种类分类包括两种,所述DCDC的控制方式包括电压控制和峰值电流控制,采用电压控制时DCDC拓扑为半桥拓扑,采用峰值电流控制时DCDC拓扑为全桥拓扑;
电压控制方式中Da的获取由电压控制环计算得到,计算公式与步骤3一致,不同的是电压控制方式中的Da获取时采用的是稳态工作下的Vout值,步骤3中的Vout是抛载动态下的值。
峰值电流控制即采用DCDC原边电流做载波信号,与调制信号比较得到开关管的驱动信号,如图8所示,峰值电流控制方式中开关管的关断是由输入电流决定的,调制信号与原边电流的比较通过MCU的片内模块实现,产生关断信号时,通过配置Pwm3Regs.DCCAPCTL.bit.CAPE = 1,使能捕获功能,在PWM模块产生关断信号同时捕获TBCTN的值T2,再与起始时刻T1比较,每周期固定的开通时刻T1是已知的,计算(T2-T1)即为当前实际的占空比Da;
MCU具体型号为TMS320f280049,配置寄存器DCCAPCTL的CAPE位,置位CAPE位具体为DCCAPCTL.bit.CAPE = 1;
步骤5:比较步骤3得到的Dc与步骤4得到的Da,根据判断条件完成SR的关断判断。
作为优选,步骤5中判断条件为:
(Dc–Da) > K*Dc
式中K为关断系数,K的取值范围为区间[0,0.2],决定SR关断的灵敏度,当K越大,越难满足关断条件,关断灵敏度越低;K越小,越容易满足关断条件,灵敏度越高;
若上式成立,判定属于抛载工况,立即关断SR;
若上式不成立,则SR无动作。
当K=0,即(Dc–Da) > 0,取下限即Dc–Da = 0,说明输出电压无波动,当前为稳态;当K=0.2,取(Dc–Da) > 0.2*Da,取下限即(Dc–Da) = 0.2*Dc,说明输出电压波动达到了20%,即K的大小反映了输出电压波动的程度,在取值范围内当K取0.2,即要求输出电压波动达到20%以上才关断SR;当K取值为0,即要求输出电压波动在0以上即可关断SR。
本实施例中K取值为0.08,判断条件为:(Dc–Da) > 0.08*Dc成立时关断SR,即要求输出电压波动达到8%时关断SR。
本发明在实际应用中的意义重大,能够极大程度的减小SR关断时的应力,带来巨大的经济效益。
上述实施例对本发明的具体描述,只用于对本发明进行进一步说明,不能理解为对本发明保护范围的限定,本领域的技术工程师根据上述发明的内容对本发明作出一些非本质的改进和调整均落入本发明的保护范围内。
- 一种优化同步整流SR关断风险的控制方法
- 一种优化同步整流SR关断风险的控制方法