一种双线平行并绕绕线方法
文献发布时间:2023-06-19 11:11:32
技术领域
本发明涉及线圈技术领域,具体而言,涉及一种双线平行并绕绕线方法。
背景技术
电磁探测电感线圈绕制需要两根线材并排平行绕制(即双线并绕)。双线并绕需要保证两根线材必须是平行并绕,不能有交叉和错行情况。目前国内线圈生产设备主要是单线绕制,很少有双线并绕设备,同时双线不交叉、不错行控制较难。
针对双线并绕存在上述控制问题,目前尚未提出有效的解决方案。
发明内容
本发明实施例中提供一种双线平行并绕绕线方法,以至少解决双线材绕制过程中易交叉、错行的问题。
为解决上述技术问题,本发明提供了一种双线平行并绕绕线方法,所述双线平行并绕绕线方法包括:
绕线设备的绕线机构对导电材质的双线材进行同步逐层绕制;
在所述同步逐层绕制过程中,所述绕线设备的第一光感线径识别模块监测双线材的第一同步绕制数据;
所述绕线设备的控制模块根据所述第一同步绕制数据,对所述绕线设备的张力机构和所述绕线设备的驱动机构进行联动控制。
可选地,所述绕线设备的控制模块根据所述第一同步绕制数据,对所述绕线设备的张力机构和所述绕线设备的驱动机构进行联动控制包括:
在所述第一同步绕制数据异常时,所述第一光感线径识别模块向所述控制模块反馈第一信号;
同时此线径为0.08mm,线径较细,容易扯断的问题,所述控制模块根据所述第一信号对所述绕线设备的张力机构和所述绕线设备的驱动机构同步实施泄力和减速处理;
在第一光感线径识别模块监测到所述第一同步绕制数据从异常恢复到正常或者接收到同步绕制启动指令时,所述控制模块对所述绕线设备的张力机构和所述绕线设备的驱动机构同步实施张力和加速处理。
可选地,所述双线平行并绕绕线方法还包括:
所述绕线设备的第二光感线径识别模块监测双线材的第二同步绕制数据;
在所述第二同步绕制数据异常时,所述第二光感线径识别模块向所述控制模块反馈第二信号;
所述控制模块根据所述第二反馈信息控制所述绕线设备的线轴抓持机构旋转,用以修正所述双线材的第二同步数据。
可选地,所述双线材具有不同颜色;判断同步绕制数据异常的方式包括:
根据所述双线材的颜色排列信息及所述双线材与光感线径识别模块的距离信息判断所述同步绕制数据是否存在异常;在所述同步绕制数据为第一同步绕制数据时,所述光感线径识别模块为第一光感线径识别模块,在所述同步绕制数据为第二同步绕制数据时,所述光感线径识别模块为第二光感线径识别模块。
可选地,所述光感线径识别模块包括颜色识别传感器和测距传感器;其中对于每个光感线径识别模块,判断同步绕制数据是否存在异常的方式具体包括:
所述颜色传感器监测所述双线材的颜色排列信息,根据所述颜色排列信息,判断所述双线材是否存在错行和交叉,在存在错行和交叉时,判定所述同步绕制数据异常;和/或
所述测距传感器监测所述双线材与该测距传感器的距离信息,根据所述距离信息,判断所述双线材是否存在交叉和叠摞,在存在交叉和叠摞时,判定所述同步绕制数据异常。
可选地,所述双线平行并绕绕线方法还包括:
所述控制模块根据所述反馈第一信号,发出同步绕制异常提示信息。
可选地,所述绕线设备包括工作台及设置在所述工作台上的驱动机构、绕线机构、张力机构、线轴、第一滑台和第一光感线径识别模块;所述第一滑台和所述张力机构依次设置在所述绕线机构和所述线轴之间,所述第一光感线径识别模块设置在所述第一滑台上,所述驱动机构用于驱动所述绕线机构旋转。
可选地,所述绕线设备还包括设置在所述工作台上的第二滑台、第二光感线径识别模块和线轴抓持机构;所述线轴抓持结构用于抓持所述线轴,所述第二光感线径识别模块设置在所述第二滑台上,所述第二滑台设置所述线轴和所述张力机构之间。
可选地,所述双线平行并绕绕线方法还包括:
在同步逐层绕线过程中,通过粘结剂层同步粘接相邻两层绕线,并通过所述绕线机构的通气结构加快所述粘结剂层的固化;
在完成同步逐层绕制后得到双线材空心线圈,并根据预设的时间参数,通过热风设备向所述双线材空心线圈吹热风;
在达到所述时间参数时,从所述绕线机构上对所述双线材空心线圈脱模。
可选地,所述在同步逐层绕制过程中,通过粘结剂层同步粘接相邻两层绕线还包括:
通过所述热风设备向逐层绕制面吹热风。
可选地,所述双线平行并绕绕线方法还包括:
根据所述粘结剂层的干化速度和所述热风设备提供的热风温度,设置所述绕线设备的转速。
可选地,所述绕线机构包括绕线模具和设置在所述绕线模具两侧的模具挡片;所述模具挡片上设置有沿周向均匀分布的多个空气槽及设置在所述空气槽中的至少一排排气孔,所述空气槽和所述排气孔构成所述通气结构。
应用本发明的技术方案,可以有效满足双线材并绕过程中的精度控制,达到张力一致,排线整列,进而有效保证双线材不交叉、不错行、不叠摞。
附图说明
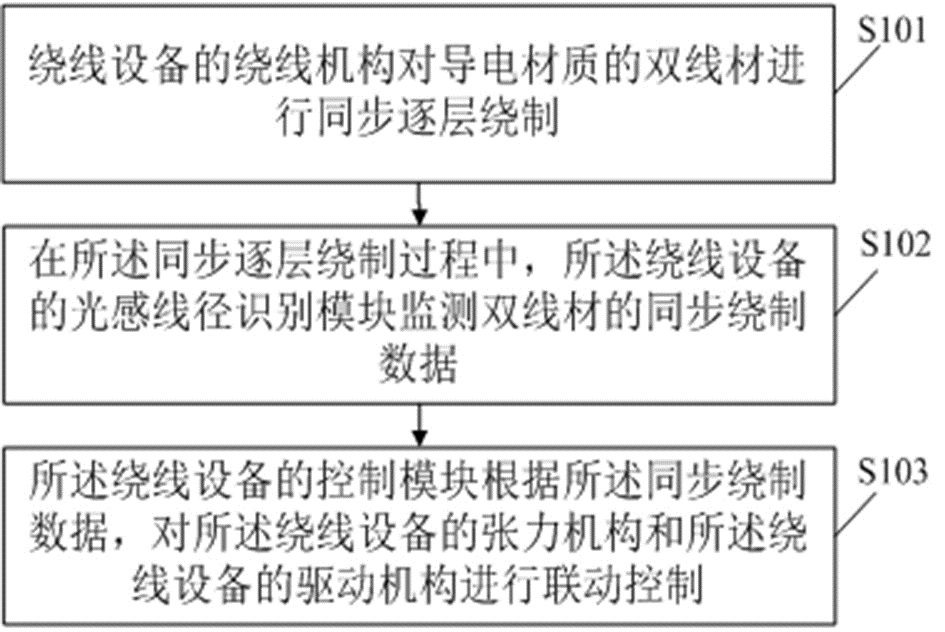
图1是根据本发明实施例的双线平行并绕绕线方法的流程图;
图2是根据本发明实施例的一种绕线设备爆炸示意图;
图3是根据本发明实施例的一种绕线设备组装示意图;
图4是根据本发明实施例的另一种绕线设备的示意图;
图5是根据本发明实施例的绕线机构爆炸图;
图6是根据本发明实施例的绕线机构立体图。
具体实施方式
下面结合附图和具体实施例对本发明作进一步详细描述,应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
在后续的描述中,使用用于表示元件的诸如“模块”、“部件”或“单元”的后缀仅为了有利于本发明的说明,其本身没有特定的意义。因此,“模块”、“部件”或“单元”可以混合地使用。
本发明实施例提供一种双线平行并绕绕线方法,如图1所示,所述双线平行并绕绕线方法包括:
S101,绕线设备的绕线机构对导电材质的双线材进行同步逐层绕制;
S102,在所述同步逐层绕制过程中,所述绕线设备的第一光感线径识别模块监测双线材的第一同步绕制数据;
S103,所述绕线设备的控制模块根据所述第一同步绕制数据,对所述绕线设备的张力机构和所述绕线设备的驱动机构进行联动控制。
如图2、图3所示,所述绕线设备包括工作台1及设置在所述工作台上的驱动机构2、绕线机构3、线罩4、张力机构5、第一滑台6和第一光感线径识别模块7;所述第一滑台6和所述张力机构5依次设置在所述绕线机构3和所述线罩4之间,所述第一光感线径识别模块7设置在所述第一滑台6上,所述驱动机构2用于驱动所述绕线机构3旋转;线罩4中设置线轴。
可选地,如图4所示,所述绕线设备还可以包括设置在工作台上的第二滑台11、第二光感线径识别模块10、线轴9和线轴抓持机构12;所述线轴抓持结构12用于抓持所述线轴9,所述第二光感线径识别模块10设置在所述第二滑台11上,所述第二滑台11设置在所述线轴9和所述张力机构5之间。
在一些实施方式中,所述绕线设备的控制模块根据所述第一同步绕制数据,对所述绕线设备的张力机构和所述绕线设备的驱动机构进行联动控制包括:
在所述第一同步绕制数据异常时,所述第一光感线径识别模块向所述控制模块反馈第一信号;
所述控制模块根据所述第一信号对所述绕线设备的张力机构和所述绕线设备的驱动机构同步实施泄力和减速处理,从而可以有效防止了绕线设备紧急停止而造成线材扯断;
在第一光感线径识别模块监测到所述第一同步绕制数据从异常恢复到正常或者接收到同步绕制启动指令时,所述控制模块对所述绕线设备的张力机构和所述绕线设备的驱动机构同步实施张力和加速处理,从而可以有效防止绕线设备紧急启动造成线材扯断。
本发明实施例通过第一光感线径识别模块监测双线材的第一同步绕制数据,然后在所述第一同步绕制数据异常时,所述第一光感线径识别模块向所述控制模块反馈第一信号,触发所述控制模块根据所述第一信号对所述绕线设备的张力机构和所述绕线设备的驱动机构同步实施泄力和减速处理,并在,第一光感线径识别模块监测到所述第一同步绕制数据从异常恢复到正常或者接收到同步绕制启动指令时,触发所述控制模块对所述绕线设备的张力机构和所述绕线设备的驱动机构同步实施张力和加速处理,从而可以有效满足双线材并绕过程中的精度控制,达到张力一致,排线整列,进而有效保证双线材不交叉、不错行,并有效防止了绕线设备紧急启动、停止而造成线材扯断。
在一些实施方式中,可以直接监测线轴和张力机构之间的双线材的第二同步绕制数据,从而可以根据第二同步绕制数据和第一同步绕制数据保证双线材的正确绕制,具体地,所述双线平行并绕绕线方法还包括:
所述绕线设备的第二光感线径识别模块监测双线材的第二同步绕制数据;
在所述第二同步绕制数据异常时,所述第二光感线径识别模块向所述控制模块反馈第二信号;
所述控制模块根据所述第二反馈信息控制所述绕线设备的线轴抓持机构旋转,用以通过线轴抓持机构的旋转修正所述双线材的第二同步数据。其中,可以根据双线材的颜色排列信息和双线材与光感线径识别模块的距离信息,控制线轴抓持机构旋转方向,并根据该距离信息修正线轴抓持机构的旋转方向。例如,在线轴抓持机构带动线轴旋转1周时,该距离信息还是异常,就修正线轴抓持机构按照在前旋转方向的相反方向旋转。具体,控制所述绕线设备的线轴抓持机构的抓持端旋转,线轴抓持机构可以采用机械臂或机械手结构。
本实施例中方法主要是按照用户的需求将线轴上的双线材进行双线平行并绕绕线,从而满足用户需求。当前,作为原材料的线轴在生产过程中,经常出现在生产过程中就已经交叉错行,从而导致双线平行并绕绕线过程中也会交叉错行,由此,本实施方式通过第二滑台11、第二光感线径识别模块10、线轴9和线轴抓持机构12构成的结构,按照本实施方式可以有效解决在线轴上存在的双线材交叉错行的问题。
在一些实施方式中,所述双线材具有不同颜色,线材可以是铜质漆包线;判断同步绕制数据异常的方式包括:
根据所述双线材的颜色排列信息及所述双线材与光感线径识别模块的距离信息判断同步绕制数据是否存在异常;在所述同步绕制数据为第一同步绕制数据时,所述光感线径识别模块为第一光感线径识别模块,在所述同步绕制数据为第二同步绕制数据时,所述光感线径识别模块为第二光感线径识别模块。
本实施方式中根据双线材的颜色排列信息及双线材与相应光感线径识别模块的距离信息,可以快速监测同步绕制数据的异常,进而保证双线材不交叉、不错行。
可选地,所述第一光感线径识别模块和第二光感线径识别模块结构相同,包括颜色识别传感器和测距传感器;例如,rgtcs34725颜色识别传感(色标传感器)和M30超声波测距传感器。其中判断同步绕制数据是否存在异常的方式具体包括:
所述颜色传感器监测所述双线材的颜色排列信息,根据所述颜色排列信息,判断所述双线材是否存在错行和交叉,在存在错行和交叉时,判定所述同步绕制数据异常;和/或
所述测距传感器监测所述双线材与该测距传感器的距离信息,根据所述距离信息,判断所述双线材是否存在交叉和叠摞,在存在交叉和叠摞时,判定所述同步绕制数据异常。其中,双线材距离不同即可判断存在交叉和叠摞。
在一些实施方式中,所述双线平行并绕绕线方法还包括:
所述控制模块根据所述第一信号,发出同步绕制异常提示信息。
在具体实现过程中,首先调整线径参数,使得测距传感器、颜色识别传感器参数也线径、间距匹配。对标后开始穿线经过各传感器到绕线机构上,设定绕线绕制参数,如绕制起点、绕制幅宽、绕制到点、绕制线径、绕制匝数等参数。启动绕线设备按设定参数绕制,在发现第一同步绕制数据异常如发现双线并绕异常或者有交叉时,传感器反馈第一信号到控制模块(主控板),可设置为高电平断开,主控板将相关信号反馈到张力机构和驱动机构(电机)动力部分,同步实施减速、泄力,直至停机,同时蜂鸣器鸣叫,提醒人工纠错;经过人工调整干预后,继续启动完成后续绕制工作,从而可以基于检测和提醒,并通过张力机构、驱动机构联动避免绕线设备突然停机,再突然开机造成线材扯断的现象。第一信号和第二信号属于控制信号。
在一些实施方式中,所述双线平行并绕绕线方法还包括:
在同步逐层绕线过程中,通过粘结剂层同步粘接相邻两层绕线,并通过所述绕线机构的通气结构加快所述粘结剂层的固化;
在完成同步逐层绕制后得到双线材空心线圈,并根据预设的时间参数,通过热风设备向所述双线材空心线圈吹热风;
在达到所述时间参数时,从所述绕线机构上对所述双线材空心线圈脱模。
本实施方式在有效保证双线材不交叉、不错行的基础上,通过绕线设备的绕线机构对导电材质的漆包线进行逐层绕线,在逐层绕线过程中,通过粘结剂层同步粘接相邻两层绕线,并通过所述绕线机构的通气结构加快所述粘结剂层的固化,从而在完成逐层绕线后可得到空心线圈,最后通过热风设备向所述空心线圈吹热风进一步固化粘接剂层,进而相对传统的扎带定型工艺,省去绑扎带、浸锡、去扎带等时间,并通过绕线机构的通气结构加快所述粘结剂层的固化,从而使得整个工艺流程由原来扎带定型工艺的12小时缩短到30分钟,有效缩短生产工期,并提高产量,因为同步粘接,因此空心线圈不会因为泄力问题导致匝间张力不均匀,造成电气性能不稳定,同时因为减少扎带捆扎受力,不会对双线材空心线圈的外观和尺寸造成破坏,提高了双线材空心线圈的质量性能。
其中,所述在同步逐层绕制过程中,通过粘结剂层同步粘接相邻两层绕线还包括:通过所述热风设备向逐层绕制面吹热风。所述热风设备可以设置在绕线设备上。
在一些实施方式中,如图5、图6所示,所述绕线机构包括绕线模具31和设置在所述绕线模具两侧的模具挡片32;所述模具挡片32上设置有沿周向均匀分布的多个空气槽33及设置在所述空气槽33中的至少一排排气孔34,所述空气槽33和所述排气孔34构成所述通气结构。在热风设备向漆包线吹热风过程中,空气槽33能够对来自漆包线表面的热风形成聚拢作用,聚拢的热风经由排气孔34排出至模具挡片32的外侧,从而进一步加速粘结剂层的固化。
其中,所述空气槽33的槽体朝内,即面向空心线圈8侧,空气槽33自模具挡片32的中心向外径向辐射设置,任意相邻两个空气槽之间的夹角为30度或45度,如此,模具挡片32越靠近中心处排气孔34越密集,越利于热风的排出。所述排气孔为圆形或长方形,任意相邻两个排气孔的中心距的范围为9毫米-11毫米。圆形排气孔的直径为3-5毫米,例如4毫米,长方形排气孔的长宽为2毫米和4毫米。空气槽的深度为1毫米,宽度与相应排气孔的直径、长度或宽度匹配。
本发明实施例中在有效保证双线材不交叉、不错行的基础上,通过通气结构可以加快粘接剂层的固化,从而可以提高绕线设备的转速,进而加快空心线圈的生产速度。
当然,在一些实施方式中,通过热风设备向逐层绕线的绕制面吹热风,从而加速粘接剂层的固化,从而进一步加快空心线圈的生产速度。
可选的,所述根据空心线圈参数,通过绕线设备的绕线机构对导电材质的漆包线进行逐层绕线之前包括:
根据所述粘结剂层的干化速度和所述热风设备提供的热风温度,设置所述绕线设备的转速。
可选的,所述粘结剂层的厚度范围为0.4毫米-0.6毫米,所述热风温度范围为75度-85度,所述绕线设备的转速范围为450转/分钟-550转/分钟。例如,通过热风设备用3档80度温度吹绕制面。
传统的扎带定型工艺,绕线设备转速比每分钟1400转,需要降低绕线设备的转速,也就是说,本发明实施例中为了配合涂抹粘接剂,可以根据所述粘结剂层的干化速度和所述热风设备提供的热风温度,来设置所述绕线设备的转速。
本发明实施例中虽然降低了绕线设备的转速,但是通过热风设备和绕线机构的通气结构可以加快粘合剂层的固化,从而可以将绕线设备的转速设置在400转/分钟左右,避免了转速过低带来的生产效率的下降,并有效保证双线材不交叉、不错行。
在一些实施方式中,所述绕线设备可设置涂胶机构,所述双线平行并绕绕线方法还包括:通过所述绕线设备的涂胶机构在相邻两层绕线之间涂抹所述粘结剂层。
可选的,所述通过所述绕线设备的涂胶机构在相邻两层绕线之间涂抹所述粘结剂层包括:
对于任意相邻两层绕线,在完成前层绕线时,降低所述绕线设备的转速;
通过所述绕线设备的涂胶机构在前层绕线涂抹所述粘结剂层;
在完成对前层绕线涂抹所述粘结层时,提升所述绕线设备的转速。
通常情况,当前层的绕线中,漆包线完成1圈的绕制,涂胶机构完成对在前层涂抹粘结剂层。
本发明实施例可有效保证双线材不交叉、不错行,并且生产工期短,产量高,因为同步粘接,因此空心线圈不会因为泄力问题导致匝间张力不均匀,造成电气性能不稳定,同时因为减少扎带捆扎受力,不会对双线材空心线圈的外观和尺寸造成破坏,提高了双线材空心线圈的质量性能。
需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括该要素的过程、方法、物品或者装置中还存在另外的相同要素。
上面结合图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
- 一种双线平行并绕绕线方法
- 一种双线平行并绕绕线设备