水平盐穴形态探测器、远程监控探测系统及远程探测方法
文献发布时间:2023-06-19 11:11:32
技术领域
本发明涉及盐穴探测技术领域,特别是涉及一种水平盐穴形态探测器、远程监控探测系统及远程探测方法。
背景技术
盐穴是利用水溶开采方式,在地下较厚的盐层中采矿后形成的地下洞穴,具有低渗透性和良好的密封性,是储存石油和天然气的良好场所。随着盐穴的开发利用,其形态的精细探测对储气库的造腔规模和安全性具有重要作用。
传统盐穴探测方式是利用电缆拖动成像声纳上下移动,获取盐穴的横向切面,再对切面合成得到盐穴的形态大小,且主要用于横向长度不超过百米的竖直型盐穴。然而,由于盐穴形态的不规则性和复杂性,此方法无法对直径长达数百米的水平型盐穴进行精细探测,适用范围受限。基于此,提出一种新型的水平盐穴形态探测技术以克服上述由于盐穴横向长度过长导致的声纳无法精确探测的问题,是本发明亟待解决的一个重点问题。
发明内容
本发明的目的是提供一种水平盐穴形态探测器、远程监控探测系统及远程探测方法,以解决上述现有技术存在的问题,该水平盐穴形态探测器结构简单合理、成本低,能够实现盐穴探测范围上的扩展,其远程监控探测系统及远程探测方法可监测探测器的实时状态,保障设备的正常运行。
为实现上述目的,本发明提供了如下方案:
本发明提供一种水平盐穴形态探测器,主要包括:
主体外壳,所述主体外壳内设地下监控系统;
探测设备,所述探测设备安装于所述主体外壳的头部,包括成像声纳和/或摄像装置,所述成像声纳用于获取盐穴的纵向切面,所述摄像装置用于获取盐穴的内部图像;所述成像声纳和/或所述摄像装置与所述地下监控系统电性连接;
驱动设备,所述驱动设备安装于所述主体外壳的尾部,用于为探测器的前进和转向提供动力;所述驱动设备与所述地下监控系统电性连接。
可选的,还包括防护设备,所述防护设备包括浮力块,所述浮力块通过支架安装于所述主体外壳的两侧,用于为所述主体外壳提供浮力和防止探测器翻转。
可选的,所述主体外壳为鱼雷型外壳,包括从头至尾依次设置的观测舱、电池舱和控制舱,相邻舱体之间通过环状件密封连接。
可选的,所述驱动设备包括转向推进器和驱动推进器,所述转向推进器安装于所述鱼雷型外壳的两侧,所述驱动推进器安装于所述鱼雷型外壳的艉部。
可选的,所述成像声纳安装于所述观测舱的外侧艏部,所述摄像装置安装于所述观测舱的内侧艏部。
可选的,所述电池舱内设置有供电电池,用于给所述地下监控系统、所述探测设备和/或所述驱动设备供电。
可选的,所述控制舱内用于安装所述地下监控系统,所述地下监控系统包括电源管理模块、树莓派、控制器和第一光纤收发器。
同时本发明提出一种水平盐穴形态远程监控探测系统,包括地面监控系统和如上所述的地下监控系统,所述地面监控系统包括地面站和第二光纤收发器,所述地面站通过所述第二光纤收发器与所述地下监控系统的上述第一光纤收发器信号连接,所述地面站用于通过所述地下监控系统对探测器进行远程控制,并在人机交互界面实时显示探测器的姿态、运动信息以及探测到的盐穴的内部图像。
可选的,所述地下监控系统包括电源管理模块、树莓派和控制器,所述控制器内置陀螺仪、加速度计和单片机,所述陀螺仪和所述加速度计用于采集探测器行进的姿态信息和控制探测器的运动,所述单片机用于对数据进行收集发送和产生驱动设备,即推进器所需的PWM,所述树莓派用于收发摄像装置和单片机的数据,所述树莓派汇总后的数据经所述光纤收发器转换后,发送到所述地面站。
同时,本发明还提出一种基于上述水平盐穴形态远程监控探测系统的水平盐穴形态远程探测方法,主要包括如下过程:在预定位置布放水平盐穴形态探测器,探测器启动后在盐穴中航行,并通过导航系统计算探测器的坐标位置;同时成像声纳获取盐穴纵向切面,摄像装置获取盐穴的内部图像,收集的数据经光纤收发器发送至地面站,经地面站的相应软件分析处理后得到盐穴形态大小及三维模型。
本发明相对于现有技术取得了以下技术效果:
(1)与现有技术相比,本发明的新型水平盐穴形态探测器灵活性更高,可探测范围更大,解决了传统声纳测量技术在探测范围上的局限性。同时,本发明的水平盐穴形态探测器可以在盐穴水溶环境中使用,实现水平盐穴形态的精细探测,拓展盐穴探测范围,增添盐穴探测新技术。
(2)本发明的新型水平盐穴形态探测器扩展了水平盐穴探测的多样性,探测方式不再局限于声纳技术,摄像装置采用图像识别技术,为获取盐穴图像提供了技术支持;探测器的功能具有可拓展性,可在探测器上加入更多传感器对盐穴进行更加细致的检测。
(3)本发明的远程监控系统及远程探测方法采用树莓派、单片机和光纤通讯技术实现了远距离通讯,不仅在地面站的人机交互界面上可以实时显示盐穴内部的图像,还可以远程控制探测器移动,实时获得探测器的姿态和运动信息,保证探测器工作的可靠性,声纳数据与摄像装置图像数据的结合,使得盐穴的形态分析变得更加可靠,为盐穴储气库的建立提供可靠的数据和技术支持,解决了水平盐穴无法精确探测的问题。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
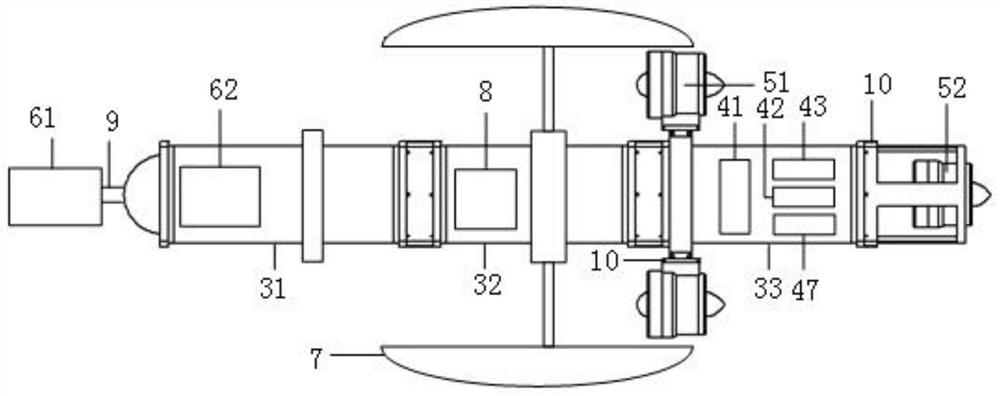
图1为本发明水平盐穴形态探测器的总体结构示意图;
图2为图1的主视图;
图3为本发明水平盐穴形态远程监控探测系统的结构示意图;
图4为本发明水平盐穴形态远程监控探测系统的流程框图;
其中,附图标记为:1-水平盐穴形态探测器、2-地面监控系统、21-地面站、22-第二光纤收发器、3-主体外壳、31-观测舱、32-电池舱、33-控制舱、4-地下监控系统、41-电源管理模块、42-树莓派、43-控制器、44-陀螺仪、45-加速度计、46-单片机、47-第一光纤收发器、5-驱动设备、51-转向推进器、52-驱动推进器、6-探测设备、61-成像声纳、62-摄像装置、7-防护设备、71-浮块、8-供电电池、9-声纳固定架、10-推进器固定架。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种水平盐穴形态探测器、远程监控探测系统及远程探测方法,该水平盐穴形态探测器结构简单合理、成本低,能够实现盐穴探测范围上的扩展,其远程监控探测系统及远程探测方法可监测探测器的实时状态,保障设备的正常运行。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
实施例一
如图1-2所示,本实施例提供一种水平盐穴形态探测器1,主要包括主体外壳3、探测设备6、驱动设备5和防护设备7,主体外壳3内设地下监控系统4;探测设备6安装于主体外壳3的头部,包括成像声纳61和摄像装置62,成像声纳61用于获取盐穴的纵向切面,摄像装置62用于获取盐穴的内部图像;驱动设备5安装于主体外壳3的尾部,用于为探测器的前进和转向提供动力;防护设备7包括浮力块71,浮力块71通过支架对称安装于主体外壳2的两侧,用于为主体外壳3提供浮力和防止探测器翻转。成像声纳61、摄像装置62以及驱动设备5均与地下监控系统4电性连接。
本实施例中,如图1-2所示,主体外壳3优选为鱼雷型外壳,包括从头至尾依次设置的观测舱31、电池舱32和控制舱33,相邻舱体之间通过环状件密封连接。
本实施例中,如图1-2所示,驱动设备5包括两组转向推进器51和一组驱动推进器52,转向推进器51通过推进器固定架10安装于鱼雷型外壳的两侧,驱动推进器52通过推进器固定架安装于鱼雷型外壳的艉部,为探测器的前进和转向提供动力。其中,推进器由螺旋桨配合无刷电机组成,为一种现有技术,可根据控制器发送PWM,实现推进器推力的大小调节和方向调节。
本实施例中,如图1-2所示,成像声纳61通过声纳固定架9安装于观测舱31的外侧艏部,且固定架将成像声纳61固定在探测器艏部突出一段的位置,以获取盐穴的纵向切面,与探测器的坐标位置和姿态信息等打包发送到地面站,经过软件处理可以得到盐穴的三维模型。摄像装置62安装于观测舱的内侧艏部,用于获取盐穴内部图像数据,发送回地面站的图像数据经过图像识别,结合探测器的位置和姿态信息,分析得到探测器与盐穴腔体内壁的距离,辅助分析成像声纳的探测结果。其中,摄像装置62优选为星光级摄像头。
本实施例中,如图1-2所示,浮块71为椭球状浮力结构,分布在探测器主体的两侧,用于保护探测器主体和驱动设备,为探测器提供一定浮力且可以防止机身翻转。
本实施例中,电池舱32内设置有供电电池8,用于给地下监控系统4、探测设备6和驱动设备5等用电设备供电,确保探测器的正常运行。该供电电池8优选为24V锂电池。
本实施例中,控制舱33内用于安装地下监控系统4,地下监控系统4包括电源管理模块41、树莓派42、控制器43和第一光纤收发器47。
同时,如图3-4所示,本实施例提出一种水平盐穴形态远程监控探测系统,包括地面监控系统2和如上所述的地下监控系统4,地面监控系统2放置于地面工作区,包括地面站21和第二光纤收发器22,地面站21通过第二光纤收发器22与地下监控系统4的第一光纤收发器47信号连接,地面站21用于通过地下监控系统4对探测器进行远程控制,并在人机交互界面实时显示探测器的姿态、运动信息以及探测到的盐穴的内部图像。上述地面监控系统2和地下监控系统4之间采用的是现有传输技术,即光纤通讯,具体不再赘述。
具体地,地下监控系统4包括电源管理模块41、树莓派42、控制器43和第一光纤收发器47,控制器43内置陀螺仪44、加速度计45和单片机46。其中,陀螺仪44和加速度计45用于采集探测器行进的姿态信息和控制探测器的运动,单片机46优选为STM32单片机,用于对数据进行收集发送和产生推进器所需的PWM,树莓派42用于收发摄像装置62和单片机46的数据,树莓派42汇总后的数据经光纤收发器22转换后,发送到地面站21。上述陀螺仪、加速度计、单片机以现有的电性连接方式集成到电路板中组成控制器43,并安装在控制舱33中,连接关系如图4所示。
本实施例中,采用上述水平盐穴形态远程监控探测系统进行水平盐穴形态探测的具体使用方法如下:
在探测器的观测舱31安装了探测设备6,电池舱32内布放了24V锂电池为探测器供电,控制舱33内安装固定远程监控系统的地下监控系统4;将地下监控系统4与地面站21通过光纤收发器信号连接。在预定位置布放水平盐穴形态探测器,探测器启动后在盐穴中航行,并通过自身导航系统计算探测器的坐标位置;同时成像声纳获取盐穴纵向切面,摄像装置获取盐穴的内部图像,收集的数据经光纤收发器发送至地面站,经地面站的相应软件分析处理后得到盐穴形态大小及三维模型。
由于盐穴与地面的信息传输距离远,光纤通信传输容量大,保密性好,采用光纤收发器实现地面站21与地下监控系统4之间的光纤通讯,避免了电力载波通讯大量的电力损耗和信号衰减,增加了信号数据的可靠性。远程监控系统的地面监控系统用于远程指令发送、探测器姿态运动参数的和盐穴图像的显示。
地下监控系统4中的控制器43,核心为STM32单片机,处理速度快,性能优越,满足探测器所需的快速反应的需求。
控制器43在采集探测器的姿态和运动信息时,使用陀螺仪44和加速度计45进行测量,确认探测器的坐标位置,树莓派42接收摄像装置的数据,并通过协议发送至地面站21,地面站21判断探测器的工作状态,然后发送指令控制探测器进行连续的盐穴形态信息采集处理。
通过上述部分,远程监控系统可在地面工作区对盐穴探测器进行运功控制、姿态监测以及盐穴内部图像的实时显示。
由此可见,本实施例相对于现有技术取得了以下技术效果:
(1)与现有技术相比,本实施例的新型水平盐穴形态探测器灵活性更高,可探测范围更大,解决了传统声纳测量技术在探测范围上的局限性。同时,本实施例的水平盐穴形态探测器可以在盐穴水溶环境中使用,实现水平盐穴形态的精细探测,拓展盐穴探测范围,增添盐穴探测新技术。
(2)本实施例的新型水平盐穴形态探测器扩展了水平盐穴探测的多样性,探测方式不再局限于声纳技术,摄像装置采用图像识别技术,为获取盐穴图像提供了技术支持;探测器的功能具有可拓展性,可在探测器上加入更多传感器对盐穴进行更加细致的检测。
(3)本实施例的远程监控系统及远程探测方法采用树莓派、单片机和光纤通讯技术实现了远距离通讯,不仅在地面站的人机交互界面上可以实时显示盐穴内部的图像,还可以远程控制探测器移动,实时获得探测器的姿态和运动信息,保证探测器工作的可靠性,声纳数据与摄像装置图像数据的结合,使得盐穴的形态分析变得更加可靠,为盐穴储气库的建立提供可靠的数据和技术支持,解决了水平盐穴无法精确探测的问题。
需要说明的是,对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内,不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
本发明中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
- 水平盐穴形态探测器、远程监控探测系统及远程探测方法
- 一种鱼群远程探测方法和鱼群远程探测系统以及对鱼群远程探测所获取信息的营销方法