示教装置、机器人系统以及存储装置
文献发布时间:2023-06-19 11:13:06
技术领域
本发明涉及示教装置、机器人系统以及示教程序。
背景技术
已知有先于机器人进行各种作业而用于对机器人示教作业的内容的示教装置。在专利文献1所记载的示教装置中,构成为通过操作人员输入机器语言来创建机器人的动作程序。并且,通过将该动作程序输入到机器人而进行示教。
专利文献1:日本特开2006-142480号公报
但是,在专利文献1中,在输入的动作程序中,混合存在机器人的位置信息、机器人的动作速度以及机器人的动作加速度等的多个项目。因此,操作人员例如在创建之后想要对特定的项目进行编辑、修改的情况下,必须从整体之中搜索该项目,这是较麻烦的。
发明内容
本发明是为了解决上述的技术问题的至少一部分而完成的,能够通过以下内容来实现。
本应用例的示教装置的特征在于,具备:显示部,所述显示部对命令显示画面、提取显示画面以及设定输入画面进行显示,其中,在所述命令显示画面显示多个已被输入的机器人的动作命令,在所述提取显示画面显示从显示于所述命令显示画面的多个所述动作命令中提取到的至少一个动作命令,在所述设定输入画面设定提取到的所述动作命令的内容;以及显示控制部,控制所述显示部的工作,所述显示控制部提取显示于所述命令显示画面的多个所述动作命令中的、与所述机器人的位置信息、速度信息以及加速度信息中的任意一个关联的动作命令并在所述提取显示画面上进行显示。
本应用例的机器人系统的特征在于,具备:本发明的示教装置;以及机器人,执行由所述示教装置创建的动作程序。
本应用例的示教程序用于执行以下步骤:将显示多个已被输入的动作命令的命令显示画面显示于显示部的步骤;以及提取显示于所述命令显示画面的多个所述动作命令中的、与所述机器人的位置信息、速度信息以及加速度信息中的任意一个关联的动作命令,并对提取显示画面和设定提取到的所述动作命令的内容的设定输入画面进行显示的步骤。
附图说明
图1是具备本发明的示教装置的机器人系统的示意构成图。
图2是图1所示的机器人系统的框图。
图3是用于说明图1所示的机器人的动作程序的图。
图4是示出图1所示的示教装置的显示部的显示画面的图。
图5是示出图1所示的示教装置的显示部的显示画面的图。
图6是用于说明图1所示的机器人的动作程序的图。
图7是示出图1所示的示教装置的显示部的显示画面的图。
图8是示出图1所示的示教装置的显示部的显示画面的图。
图9是用于说明图1所示的示教装置的控制方法的流程图。
附图标记说明
2…机器人,3…示教装置,4…受理部,5…力检测部,6…显示画面,6A…任务栏,6B…命令输入画面,6C…命令显示画面,6D…提取显示画面,6E…设定输入画面,7…末端执行器,8…控制装置,20…机械臂,21…基座,22…第一臂部,23…第二臂部,24…第三臂部,25…驱动单元,26…驱动单元,27…u驱动单元,28…z驱动单元,29…角速度传感器,31…CPU,32…存储部,33…通信部,34…显示部,61A…第一状态选择按钮,61E…x输入部,62A…第二状态选择按钮,62E…y输入部,63E…z输入部,64E…u输入部,81…CPU,82…存储部,83…通信部,100…机器人系统,220…箱体,230…箱体,241…主轴,251…电机,252…减速器,253…位置传感器,261…电机,262…减速器,263…位置传感器,271…电机,272…减速器,273…位置传感器,281…电机,282…减速器,283…位置传感器,200…供料场所,300…托盘,301…凹槽,400…工作台,500…去除场所,O1…第一轴,O2…第二轴,O3…第三轴,TCP…控制点,W…工件。
具体实施方式
以下,基于附图所示的优选的实施方式对本发明的示教装置、机器人系统以及示教程序进行详细说明。
第一实施方式
图1是具备本发明的示教装置的机器人系统的示意构成图。图2是图1所示的机器人系统的框图。图3是用于说明图1所示的机器人的动作程序的图。图4是示出图1所示的示教装置的显示部的显示画面的图。图5是示出图1所示的示教装置的显示部的显示画面的图。图6是用于说明图1所示的机器人的动作程序的图。图7是示出图1所示的示教装置的显示部的显示画面的图。图8是示出图1所示的示教装置的显示部的显示画面的图。图9是用于说明图1所示的示教装置的控制方法的流程图。
另外,在图1中,为了便于说明,图示了x轴、y轴以及z轴作为相互正交的三轴。另外,以下,将与x轴平行的方向也称为“x轴方向”,将与y轴平行的方向也称为“y轴方向”,将与z轴平行的方向也称为“z轴方向”。另外,以下,将图示出的各箭头的前端侧称为“+(正)”,将基端侧称为“-(负)”。另外,将绕z轴的方向和绕与z轴平行的轴的方向也称为“u轴方向”。
另外,以下为了便于说明,将图1中的+z轴方向、即上侧也称为“上”或者“上方”,将-z轴方向、即下侧也称为“下”或者“下方”。另外,关于机械臂20,将图1中的基座21侧称为“基端”,将与其相反的一侧、即末端执行器7侧称为“前端”。另外,将图1中的z轴方向、即上下方向设为“铅垂方向”,将x轴方向和y轴方向、即左右方向设为“水平方向”。
图1和图2所示的机器人系统100例如是在电子部件和电子设备等工件的保持、搬运、组装以及检查等作业中使用的装置。机器人系统100具备机器人2和对机器人2示教动作程序的示教装置3。另外,机器人2与示教装置3能够通过有线或者无线进行通信,该通信也可以经由如互联网那样的网络来完成。
示教是指对机器人2指定动作程序,具体地说,是指将机械臂20的位置、姿态输入到控制装置8。该示教具有直接示教和间接示教,本发明涉及使用了示教装置3的间接示教。
直接示教是指,通过一边对机械臂20施加外力而使机械臂20移动到规定的位置、姿态,一边按期望的定时对受理部4的示教按钮进行操作,从而将机械臂20的动作存储到控制装置8或者示教装置3。
另外,间接示教是指,在后述的显示部34的显示画面6上创建动作程序,将创建后的动作程序存储到控制装置8或者示教装置3。
首先,对机器人2进行说明。
机器人2在图示的构成中是水平多关节机器人、即SCARA机器人。如图1所示,机器人2具有:基座21、连接到基座21的机械臂20、受理来自操作人员的规定的操作的受理部4、力检测部5、末端执行器7以及控制这些各部分的工作的控制装置8。
基座21是支承机械臂20的部分。在基座21上内置有后述的控制装置8。另外,在基座21的任意的部分设定有机器人坐标系的原点。此外,图1所示的x轴、y轴以及z轴是机器人坐标系的轴。
机械臂20具备第一臂部22、第二臂部23以及作为作业头的第三臂部24。此外,机器人2不限定于图示的构成,臂部的数量可以是一个或者两个,也可以是四个以上。
另外,机器人2具备:驱动单元25,其使第一臂部22相对于基座21旋转;驱动单元26,其使第二臂部23相对于第一臂部22旋转;u驱动单元27,其使第三臂部24的主轴241相对于第二臂部23旋转;z驱动单元28,其使主轴241相对于第二臂部23在z轴方向上移动;以及角速度传感器29。
如图1和图2所示,驱动单元25内置在第一臂部22的箱体220内,其具有:电机251,产生驱动力;减速器252,将电机251的驱动力减速;以及位置传感器253,检测电机251或者减速器252的旋转轴的旋转角度。
驱动单元26内置于第二臂部23的箱体230,其具有:电机261,产生驱动力;减速器262,将电机261的驱动力减速;以及位置传感器263,检测电机261或者减速器262的旋转轴的旋转角度。
u驱动单元27内置于第二臂部23的箱体230,其具有:电机271,产生驱动力;减速器272,将电机271的驱动力减速;以及位置传感器273,检测电机271或者减速器272的旋转轴的旋转角度。
z驱动单元28内置于第二臂部23的箱体230,其具有:电机281,产生驱动力;减速器282,将电机281的驱动力减速;以及位置传感器283,检测电机281或者减速器282的旋转轴的旋转角度。
作为电机251、电机261、电机271以及电机281,例如能够使用AC伺服电机、DC伺服电机等伺服电机。
另外,作为减速器252、减速器262、减速器272以及减速器282,例如,能够使用游星齿轮型减速器、波动齿轮装置等。另外,位置传感器253、位置传感器263、位置传感器273以及位置传感器283例如能够设为角度传感器。
驱动单元25、驱动单元26、u驱动单元27以及z驱动单元28分别连接到对应的未图示的电机驱动器,经由电机驱动器由控制装置8的机器人控制部11控制。
另外,如图2所示,角速度传感器29内置于第二臂部23。因此,能够检测第二臂部23的角速度。控制装置8基于该检测出的角速度的信息进行机器人2的控制。
基座21例如通过螺栓等固定到未图示的地面。在基座21的上端部连结有第一臂部22。第一臂部22能够相对于基座21绕沿着铅垂方向的第一轴O1旋转。若使第一臂部22旋转的驱动单元25驱动,则第一臂部22相对于基座21绕第一轴O1在水平面内旋转。另外,通过位置传感器253,能够检测第一臂部22相对于基座21的旋转量。
另外,在第一臂部22的前端部连结有第二臂部23。第二臂部23能够相对于第一臂部22绕沿着铅垂方向的第二轴O2旋转。第一轴O1的轴方向与第二轴O2的轴方向是相同的。即,第二轴O2是与第一轴O1平行的。若使第二臂部23旋转的驱动单元26驱动,则第二臂部23相对于第一臂部22绕第二轴O2在水平面内旋转。另外,通过位置传感器263,能够检测第二臂部23相对于第一臂部22的驱动量、具体地说旋转量。
另外,在第二臂部23的前端部设置、支承有第三臂部24。第三臂部24具有主轴241。主轴241能够相对于第二臂部23绕沿着铅垂方向的第三轴O3旋转,且能够在上下方向上移动。该主轴241是机械臂20的最前端的臂部。
若使主轴241旋转的u驱动单元27驱动,则主轴241绕z轴旋转。另外,能够通过位置传感器273来检测主轴241相对于第二臂部23的旋转量。
另外,若使主轴241在z轴方向上移动的z驱动单元28驱动,则主轴241在上下方向、即z轴方向上移动。另外,通过位置传感器283,能够检测主轴241相对于第二臂部23的z轴方向的移动量。
另外,在机器人2中,设定有以主轴241的前端为控制点TCP、以该控制点TCP为原点的前端坐标系。另外,该前端坐标系在与上述的机器人坐标系完成了校准的情况下,能够将前端坐标系中的位置转换为机器人坐标系。由此,能够用机器人坐标系来确定控制点TCP的位置。
另外,各种末端执行器以能够拆装的方式连结于主轴241的前端部。作为末端执行器,没有特别限定,例如可举出把持被搬运物、加工被加工物、用于检查的末端执行器等。在本实施方式中,以能够拆装的方式连结有末端执行器7。
此外,末端执行器7在本实施方式中并未成为机器人2的构成要素,但末端执行器7的一部分或者全部也可以成为机器人2的构成要素。
如图1所示,力检测部5检测对机器人2施加的力、即对机械臂20和基座21施加的力。在本实施方式中,力检测部5设置于基座21的下方、即-z轴侧,从下方支承着基座21。
力检测部5例如能够设为由水晶等压电体构成的、具有若受到外力则输出电荷的多个元件的结构。另外,控制装置8能够根据该电荷量转换为机械臂10所受到的外力。另外,若是这种压电体,则能够根据所设置的朝向来调整受到外力时能够产生电荷的朝向。
另外,受理部4是受理操作人员的规定的操作的部位。受理部4虽未图示但具有示教按钮。该示教按钮能够在进行直接示教的情况下使用。示教按钮既可以是机械按钮,也可以是触摸式电动按钮。另外,在操作按钮的周围也可以设置有功能不同的按钮。
接着,对控制装置8进行说明。
如图1和图2所示,控制装置8在本实施方式中内置于基座21。另外,如图2所示,控制装置8具有控制机器人2的驱动的功能并与上述的机器人2的各部分电连接。控制装置8具有CPU(Central Processing Unit:中央处理单元)81、存储部82以及通信部83。这些各部分例如经由总线以能够相互通信的方式连接。
CPU81读出并执行在存储部82中存储的各种程序等。由CPU81生成的指令信号经由通信部83发送到机器人2。由此,机械臂10能够执行规定的作业。
存储部82保存CPU81能够执行的各种程序等。作为存储部82,例如可举出RAM(Random Access Memory:随机存取存储器)等易失性存储器、ROM(Read Only Memory:只读存储器)等非易失性存储器、拆装式的外部存储装置等。
通信部83例如使用有线LAN(Local Area Network:局域网)、无线LAN等外部接口分别在机器人2的各部分与示教装置3之间进行信号的发送接收。
接着,对示教装置3进行说明。
如图2所示,示教装置3具有控制机械臂10的工作的功能,如图2所示,其具有CPU(Central Processing Unit:中央处理单元)31、存储部32、通信部33以及显示部34。作为示教装置3,虽然没有特别限定,但是例如可举出平板、个人计算机、智能电话等。
CPU31读出并执行在存储部32中存储的各种程序等。作为各种程序,例如可举出后述的本发明的示教程序等。该示教程序可以是由示教装置3生成的示教程序、也可以是例如从CD-ROM等外部记录介质存储的示教程序,还可以是经由网络等存储的示教程序。
由CPU31生成的信号经由通信部33发送到机器人2的控制装置8。由此,机械臂10能够按规定的条件执行规定的作业或者进行示教。另外,CPU31控制图3~图9所示的显示部34的驱动。即,CPU31作为控制显示部34的工作的显示控制部发挥功能。
存储部32保存CPU31能够执行的各种程序等。作为存储部32,例如可举出RAM(Random Access Memory:随机存取存储器)等易失性存储器、ROM(Read Only Memory:只读存储器)等非易失性存储器、拆装式的外部存储装置等。
通信部33例如使用有线LAN(Local Area Network:局域网)、无线LAN等外部接口分别在与控制装置8之间进行信号的发送接收。
显示部34由具有显示画面6的各种显示器构成。在本实施方式中,作为一个例子,对触摸面板式、即显示部34具备显示功能和输入操作功能的构成进行说明。若操作人员触碰即触摸显示画面6,则CPU31进行切换为规定的显示等控制。
不过,不限于这种构成,也可以是另外具备输入操作部的构成。在这种情况下,输入操作部可举出例如鼠标、键盘等。另外,也可以是同时采用触摸面板和鼠标、键盘的构成。即,以下描述的输入操作可以是使用鼠标、键盘等使显示画面6中显示的光标移动并进行选择的构成。
在间接示教中(以下简称为“示教中”),显示部34在显示画面6中显示图4、图5、图7以及图8所示的窗口。该窗口具有任务栏6A、命令输入画面6B、命令显示画面6C、提取显示画面6D以及设定输入画面6E。即,显示部34显示任务栏6A、命令输入画面6B、命令显示画面6C、提取显示画面6D以及设定输入画面6E。
另外,CPU31控制显示部34的工作,使得对第一状态和第二状态进行切换,其中,上述第一状态如图4和图7所示显示有任务栏6A、命令输入画面6B、命令显示画面6C及设定输入画面6E,上述第二状态如图5和图8所示显示有任务栏6A、提取显示画面6D及设定输入画面6E。
任务栏6A位于显示画面6内的左侧,是显示有多个按钮、图标的区域。任务栏6A具有选择第一状态的第一状态选择按钮61A和选择第二状态的第二状态选择按钮62A。操作人员通过触摸显示画面6中的与第一状态选择按钮61A对应的位置来选择第一状态,通过触摸与第二状态选择按钮62A对应的位置来选择第二状态。即,根据第一状态和第二状态的切换,选择性地切换命令显示画面6C和提取显示画面6D。
这样,作为显示控制部的CPU31仅显示命令显示画面6C或者提取显示画面6D中的任意一方。由此,如后所述,能够对显示有所选择的全部动作程序的画面和仅显示有所期望的内容的动作命令的画面进行切换。因而,能够简单地搜索所期望的动作程序,从而能够简单地进行示教。
命令输入画面6B从上侧起排列显示多个动作命令。动作命令是对机器人2进行示教的单位动作命令,在命令输入画面6B中显示有机器人2可以执行的各种动作命令。
在图4和图7所示的构成中,从上方起依次排列显示有:显示为“电机初始化”的输入按钮、显示为“移动”的输入按钮、显示为“夹钳”的输入按钮、显示为“托盘反复动作”的输入按钮、显示为“输入输出”的输入按钮、显示为“信号输出”的输入按钮、显示为“消息”的输入按钮、显示为“逻辑”的输入按钮、显示为“待机”的输入按钮、显示为“容器”的输入按钮、显示为“重复”的输入按钮、显示为“条件分支”的输入按钮、显示为“对话”的输入按钮以及显示为“停止”的输入按钮。这些输入按钮是进行输入机器人2的动作命令的操作的命令输入部。
操作人员根据想使机器人2进行的动作,通过依次触摸显示画面6的与命令输入画面6B对应的位置,从而在命令显示画面6C中从上方起依次显示。
这样,作为显示控制部的CPU31显示命令输入画面6B,命令输入画面6B具有作为进行输入机器人2的动作命令的操作的命令输入部的输入按钮。由此,通过操作与所期望的动作程序对应的输入按钮这一简单的方法,能够创建动作程序。
在此,在想使机器人2进行图3所示那样的动作的情况下,创建图4所示那样的动作程序。图3所示的动作是机器人2从供应工件W的供料场所200把持工件W并将工件W依次配置于托盘300的凹槽301的动作。在这种情况下,如图4所示,依次触摸“电机初始化”的输入按钮、“移动”的输入按钮、“信号输出”的输入按钮、“移动”的输入按钮、“夹钳”的输入按钮、“移动”的输入按钮、“信号输出”的输入按钮、“托盘反复动作”的输入按钮、“待机”的输入按钮以及“停止”的输入按钮。
由此,在命令显示画面6C中,依次从上侧起显示有“电机初始化”的图标、“移动”的图标、“信号输出”的图标、“移动”的图标、“夹钳”的图标、“移动”的图标、“信号输出”的图标、“托盘反复动作”的图标、“待机”的图标、“停止”的图标,并能够设定单位动作程序的顺序。
另外,触摸“托盘反复动作”的图标,之后通过进行各种设定,从而在“托盘反复动作”的图标内从上方起依次显示有“托盘”的图标、“移动”的图标、“移动”的图标以及“夹钳”的图标。即,能够设定在托盘300中机器人2进行什么样的动作。
另外,例如,在想使机器人2进行图6所示那样的动作的情况下,创建图7所示那样的动作程序。图6所示的动作是机器人2从配置有工件W的工作台400把持工件W并将工件W依次搬运到去除场所500的动作。在这种情况下,如图7所示,依次触摸“电机初始化”的输入按钮、“移动”的输入按钮、“移动”的输入按钮、“待机”的输入按钮、“高级命令”的输入按钮、“移动”的输入按钮、“夹钳”的输入按钮以及“停止”的输入按钮。
由此,在命令显示画面6C中,从上方起依次显示有“电机初始化”的图标、“移动”的图标、“移动”的图标、“待机”的图标、“视觉”的图标、“移动”的图标、“夹钳”的图标以及“停止”的图标。
另外,在按压了“高级命令”的输入按钮之后,虽未图示,但通过输入“视觉”,之后进行各种设定,从而在“视觉”的图标内从上方起依次显示“移动(视觉)”的图标、“移动(视觉)”的图标、“夹钳”的图标以及“移动”的图标。即,能够进行拍摄工作台400的未图示的照相机的各种设定等。
这样,在示教装置3中能够简单地设定动作程序的顺序。
另外,如图4和图7所示,触摸与在命令显示画面6C中显示的图标对应的位置,从而成为选择了该图标的状态。然后,在该状态下,对设定输入画面6E进行操作以及设定,从而能够设定所选择的图标的动作程序中的机器人2的位置信息、即使机器人2的控制点移动的目标位置。
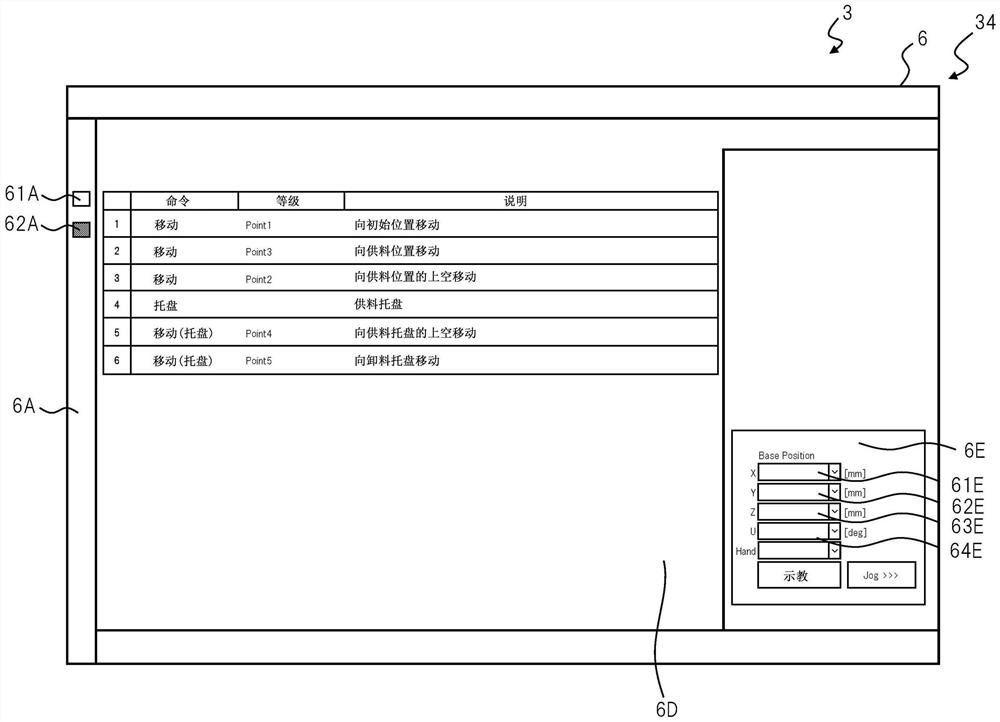
如图4、图5、图7以及图8所示,设定输入画面6E是输入被选择的命令的内容的画面,在图示的构成中,能够输入位置信息。另外,设定输入画面6E在第一状态和第二状态中的任意的状态下均被显示。设定输入画面6E在第一状态下显示于命令显示画面6C的右侧,在第二状态下显示于提取显示画面6D的右侧。
设定输入画面6E具有:输入x轴方向的位置、即机器人坐标系中的坐标的x输入部61E;输入y轴方向的位置、即机器人坐标系中的坐标的y输入部62E;输入z轴方向的位置、即机器人坐标系中的坐标的z输入部63E;以及输入u轴方向的位置、即主轴241的旋转量的u输入部64E。由此,在各单位动作程序中能够准确地输入目标位置。
那么,如图4、图7所示,在设定单位动作程序的顺序并在设定输入画面6E中完成了位置信息的设定之后,有时会再次编辑、修改位置信息。以往,进行根据创建中的程序来搜索与位置信息对应的部分的麻烦的作业。与此相对,在本发明中通过设为以下的构成,从而能够解决上述问题。以下,将图4和图5举为例子进行说明。
在图4所示的第一状态中,触摸与第二状态选择按钮62A对应的位置,从而第二状态被选择。在该第二状态下,图4所示的命令输入画面6B和命令显示画面6C被切换至图5所示的提取显示画面6D。
在提取显示画面6D中,命令显示画面6C中显示的多个动作命令中的、与机器人2的位置信息关联的动作命令被提取并显示。即,CPU31控制显示部34的工作,使得仅提取与机器人2的位置信息关联的动作命令,并将它们显示于提取显示画面6D。由此,操作人员当编辑位置信息时,能够仅观看与位置信息有关的动作命令的一览而立刻识别所期望的动作命令并进行选择。
另外,在提取显示画面6D中,能够选择性地选择已被提取的动作命令。然后,在设定输入画面6E中,能够设定已被选择的动作命令的参数。由此,能够再次编辑、修改选择后的动作命令的位置信息。
另外,如图5所示,在显示部34中,一并显示提取显示画面6D和设定输入画面6E。即,作为显示控制部的CPU31一并显示提取显示画面6D和设定输入画面6E。由此,在选择了提取显示画面6D的已被提取的动作命令之后,能够立刻输入或者修改该动作命令的位置信息。因而,能够进一步简单地进行示教。
另外,在提取显示画面6D中,已被提取的动作命令按输入到命令显示画面6C的顺序、即时间序列进行显示。换言之,作为显示控制部的CPU31将提取到的动作命令按时间序列显示于提取显示画面6D。由此,操作人员在从提取显示画面6D搜索所期望的动作命令时,能够进一步简单地进行搜索。因而,能够进一步简单地进行示教。
在这样完成了对动作命令的位置信息进行再次编辑、修改之后,在显示画面6中,若触摸设定输入画面6E的与“示教”的按钮对应的位置,则动作程序的创建完成,在存储部32中存储该动作程序,示教完成。
如以上所说明那样,本发明的示教装置3具备:显示部34,对命令显示画面6C、提取显示画面6D以及设定输入画面6E进行显示,其中,在命令显示画面6C显示多个已被输入的机器人的动作命令,在提取显示画面6D显示从显示于命令显示画面6C的多个动作命令中提取到的至少一个动作命令,在设定输入画面6E设定提取到的动作命令的内容;以及CPU31,作为控制显示部34的工作的显示控制部。然后,CPU31提取显示于命令显示画面6C的多个动作命令中的、与机器人2的位置信息、速度信息以及加速度信息中的任意一个关联的动作命令,在上述中为机器人2的位置信息并在提取显示画面6D上进行显示。由此,操作人员在对提取到的动作命令的内容例如位置信息进行编辑时,能够仅观看与位置信息有关的动作命令的一览而立刻识别所期望的动作命令并进行选择。因而,能够简单地进行示教。
此外,在上述中,提取显示画面6D中显示的动作命令是与机器人2的位置信息关联的动作命令,但在本发明中不限定于此,例如,也可以是与机器人2的速度信息、即机械臂20的各部分的速度信息关联的动作命令,还可以是与机器人2的加速度信息、即机械臂20的各部分的加速度信息关联的动作命令。
另外,在提取显示画面6D中提取的动作命令是与机器人2的速度信息关联的动作命令的情况下,设定输入画面6E显示将机器人2的速度信息输入的速度输入部。另外,在提取显示画面6D中提取的动作命令是与机器人2的加速度信息关联的动作命令的情况下,设定输入画面6E显示将机器人2的加速度信息输入的加速度输入部。
即,作为显示控制部的CPU31显示与提取到的动作命令的内容对应的设定输入画面6E。由此,能够根据提取并显示的内容进行该内容的设定。
另外,如上所述,显示部34显示任务栏6A、命令输入画面6B、命令显示画面6C、提取显示画面6D以及设定输入画面6E,但在本发明中,不限定于图示那样的配置。例如,也可以是任务栏6A、命令输入画面6B、命令显示画面6C以及提取显示画面6D中的一个或者多个分别显示在不同的显示器的构成。
另外,本发明的机器人系统100具备:示教装置3和执行由示教装置3创建的动作程序的机器人2。由此,能够得到发挥上述效果的机器人系统100。
另外,如以下说明那样,本发明的示教程序是用于执行如下步骤的程序:将显示多个已被输入的动作命令的命令显示画面6C显示于显示部34的步骤;以及提取显示于命令显示画面6C的多个动作命令中的、与机器人2的位置信息、速度信息以及加速度信息中的任意一个关联的动作命令,并对提取显示画面6D和设定提取到的动作命令的内容的设定输入画面6E进行显示的步骤。由此,操作人员在编辑已被提取的动作命令的内容例如位置信息时,能够仅观看与位置信息有关的动作命令的一览而立刻识别所期望的动作命令并进行选择。因而,能够简单地进行示教。
此外,本发明的示教程序可以存储到存储部32,也可以保存到例如CD-ROM等记录介质,还可以存储到经由网络等连接的存储装置。
接着,基于图9所示的流程图对CPU31所进行的控制动作进行说明。
首先,在步骤S101中,以成为第一状态的方式进行显示。即,如图4和图7所示,在显示画面6中显示任务栏6A、命令输入画面6B、命令显示画面6C以及设定输入画面6E。
接下来,在步骤S102中,判断动作命令是否已被输入。即,判断命令输入画面6B的各输入按钮是否已被按下。在步骤S102中,在判断为动作命令已被输入的情况下,在步骤S103中,将示出已被选择的动作命令的图标按时间序列显示于命令显示画面6C。
接下来,在步骤S104中,判断是否有切换为第二状态的指示。即,判断任务栏6A的第二状态选择按钮62A是否已被触摸。在步骤S104中,在判断为有切换为第二状态的指示的情况下,在步骤S105中,以成为第二状态的方式进行显示。即,如图5和图8所示,在显示画面6中显示任务栏6A、提取显示画面6D以及设定输入画面6E。
接下来,在步骤S106中,判断规定的动作命令是否已被选择。即,判断在提取显示画面6D中显示的图标中的任意一个是否已被触摸。在步骤S106中,在判断为规定的动作命令已被选择的情况下,在步骤S107中,判断设定输入画面6E是否已被操作。即,在设定输入画面6E中,判断位置信息是否已被再次输入。然后,在步骤S108中,判断是否完成示教程序。即,判断在显示画面6中设定输入画面6E的与“示教”的按钮对应的位置是否已被触摸。在步骤S108中,在判断为完成示教程序的情况下,将现状的动作程序及其设定存储到存储部32,完成示教程序。
以上,基于图示的实施方式说明了本发明的示教装置、机器人系统以及示教程序,但本发明不限于此,各部分的构成能够置换为具有同样的功能的任意的构成。另外,也可以在示教装置、控制方法以及示教程序中分别附加其它任意的构成物、工序。
- 机器人示教系统、机器人示教辅助装置和机器人示教方法
- 一种机器人的示教方法、机器人的示教装置及机器人系统