控制方法和装置
文献发布时间:2023-06-19 11:14:36
技术领域
本申请涉及自动驾驶、智能驾驶或者无人驾驶技术领域,尤其涉及一种控制方法和装置。
背景技术
随着社会的发展,智能汽车正在逐步进入人们的日常生活中。安装在汽车上的传感器可以在汽车行驶过程中随时感知周围的环境,也可以预先察觉到可能发生的危险并及时帮助驾驶员甚至自主采取必要的规避手段,有效增加了汽车驾驶的安全性和舒适性。
通常的,汽车可以通过车灯的颜色等传递行驶意图,其他车辆则可以通过车载摄像头识别该车辆的车灯颜色信息,确定该车辆的行驶意图。
但是,车载摄像头的识别成功率容易受到天气的影响,导致确定该车辆行驶意图的精度不高。
发明内容
本申请实施例提供一种控制方法和装置,应用于自动驾驶、智能驾驶或者无人驾驶技术领域。所述方法包括:确定第一状态提示,控制第一终端中的至少一个第一目标设备执行第一动作,第一动作用于指示第一状态提示。其中,第一动作对应于第一状态提示;获取至少一个第一目标设备的第一动作的信息,根据第一动作的信息,获取来自第一目标设备所在的第一终端的第一状态提示。其中,第一动作用于指示第一状态提示。这样,获取的第一状态提示是基于第一目标设备的第一动作指示的,可以减少环境能见度等的影响,基于所获取的第一状态提示可以相应调整驾驶策略,从而提高车辆驾驶的安全性和舒适性。
第一方面,本申请实施例提供一种控制方法,所述方法包括:确定第一状态提示;控制第一终端中的至少一个第一目标设备执行第一动作,第一动作用于指示第一状态提示;其中,第一动作对应于第一状态提示。这样,获取的第一状态提示是基于第一目标设备的第一动作指示的,可以减少环境能见度等的影响,基于所获取的第一状态提示可以相应调整驾驶策略,从而提高车辆驾驶的安全性和舒适性。
可能的实现方式中,第一动作与第一状态提示之间存在预先定义或者配置的对应关系。这样,基于该对应关系,可以通过所执行的第一动作准确知道所要传递的第一状态提示,从而提高车辆驾驶的安全性和舒适性。
可能的实现方式中,还包括:控制第一终端中的至少一个第一处理装置执行第一处理,第一处理对应于第一状态提示。这样,除了可以通过第一目标设备执行的第一动作隐式地传递第一状态提示,也可以通过第一处理装置执行的第一处理显式地传递第一状态提示,从而提高传递第一状态提示的准确率。
可能的实现方式中,控制第一终端中的至少一个第一目标设备执行第一动作,包括:确定第一终端周围的能见度低于阈值,控制第一终端中的至少一个第一目标设备执行第一动作;确定第一终端周围的能见度低于阈值,包括:获取第一终端的环境信息;确定第一终端周围的能见度低于阈值。
可能的实现方式中,获取第一终端的环境信息,包括:获取第一终端周围的图像数据;和/或,获取第一终端周围的天气信息。
可能的实现方式中,第一动作与至少一个第一目标设备的运动角度、运动速度、运动方向、振动频率中的至少一个相关。
可能的实现方式中,第一状态提示包括行驶意图和/或交通信息,行驶意图包括:转向、并线、掉头、靠边停车或起步,交通信息包括:道路拥堵、事故发生、车辆紧急状态或让行紧急车辆。
可能的实现方式中,所述方法还包括:通过雷达获取来自第二终端的第二状态提示,第二状态提示通过第二终端的至少一个第二目标设备的第二动作指示;其中,第二动作对应于第二状态提示。
可能的实现方式中,第二目标设备包括车灯、雨刷或车标中的至少一个。
第二方面,本申请实施例提供一种控制方法,其特征在于,所述方法包括:获取至少一个第一目标设备的第一动作的信息;根据第一动作的信息,获取来自第一目标设备所在的第一终端的第一状态提示,其中,第一动作用于指示第一状态提示。获取的第一状态提示是基于第一目标设备的第一动作指示的,可以减少环境能见度等的影响,基于所获取的第一状态提示可以相应调整驾驶策略,从而提高车辆驾驶的安全性和舒适性。
可能的实现方式中,第一动作与第一状态提示之间存在预先定义或者配置的对应关系。这样,基于该对应关系,可以根据第一动作的信息,准确得到第一目标设备所在的第一终端的第一状态提示,从而根据第一状态提示相应调整驾驶策略。
可能的实现方式中,第一状态提示包括行驶意图和/或交通信息,行驶意图包括:转向、并线、掉头、靠边停车或起步,交通信息包括:道路拥堵、事故发生、车辆紧急状态或让行紧急车辆。
可能的实现方式中,第一动作与至少一个第一目标设备的运动角度、运动速度、运动方向、振动频率中的至少一个相关。
可能的实现方式中,获取至少一个第一目标设备的第一动作的信息,包括:通过雷达检测第一动作以获取第一动作的信息;或者,获取来自雷达的第一动作的信息。
可能的实现方式中,第一动作的信息包括:第一动作对应的第一状态提示、第一动作对应的第一原始数据或第一动作对应的第一状态分解信息;其中,第一原始数据包括通过雷达检测第一动作而得到的数据矩阵;第一状态分解信息包括第一原始数据经过时频分析而得到的信息,第一状态提示由多个第一状态分解信息组成。
可能的实现方式中,还包括:响应于第一终端的第一状态提示,控制第二终端执行操作。
可能的实现方式中,所述方法还包括:确定第二状态提示;控制第二终端中的至少一个第二目标设备执行第二动作,第二动作用于指示第二状态提示;其中,第二动作对应于第二状态提示。
可能的实现方式中,第二目标设备包括车灯、雨刷和/或车标。
第三方面,本申请实施例提供一种控制装置,其特征在于,所述装置包括:处理单元,用于确定第一状态提示;处理单元,还用于控制第一终端中的至少一个第一目标设备执行第一动作,第一动作用于指示第一状态提示;其中,第一动作对应于第一状态提示。
可能的实现方式中,第一动作与第一状态提示之间存在预先定义或者配置的对应关系。这样,基于该对应关系,可以通过所执行的第一动作准确知道所要传递的第一状态提示,从而提高车辆驾驶的安全性和舒适性。
可能的实现方式中,处理单元,还用于:控制第一终端中的至少一个第一处理装置执行第一处理,第一处理对应于第一状态提示。这样,除了可以通过第一目标设备执行的第一动作隐式地传递第一状态提示,也可以通过第一处理装置执行的第一处理显式地传递第一状态提示,从而提高传递第一状态提示的准确率。
可能的实现方式中,处理单元,具体用于:确定第一终端周围的能见度低于阈值,控制第一终端中的至少一个第一目标设备执行第一动作;处理单元,具体还用于:获取第一终端的环境信息;确定第一终端周围的能见度低于阈值。
可能的实现方式中,处理单元,具体用于:获取第一终端周围的图像数据;和/或,获取第一终端周围的天气信息。
可能的实现方式中,第一动作与至少一个第一目标设备的运动角度、运动速度、运动方向、振动频率中的至少一个相关。
可能的实现方式中,第一状态提示包括行驶意图和/或交通信息,行驶意图包括:转向、并线、掉头、靠边停车或起步,交通信息包括:道路拥堵、事故发生、车辆紧急状态或让行紧急车辆。
可能的实现方式中,处理单元,具体用于:通过雷达获取来自第二终端的第二状态提示,第二状态提示通过第二终端的至少一个第二目标设备的第二动作指示;其中,第二动作对应于第二状态提示。
可能的实现方式中,第二目标设备包括车灯、雨刷或车标中的指示一个。
第四方面,本申请实施例提供一种控制装置,其特征在于,所述装置包括:处理单元,用于获取至少一个第一目标设备的第一动作的信息;处理单元,还用于根据第一动作的信息,获取来自第一目标设备所在的第一终端的第一状态提示,其中,第一动作用于指示第一状态提示。
可能的实现方式中,第一动作与第一状态提示之间存在预先定义或者配置的对应关系。这样,基于该对应关系,可以根据第一动作的信息,准确得到第一目标设备所在的第一终端的第一状态提示,从而根据第一状态提示相应调整驾驶策略。
可能的实现方式中,第一状态提示包括行驶意图和/或交通信息,行驶意图包括:转向、并线、掉头、靠边停车或起步,交通信息包括:道路拥堵、事故发生、车辆紧急状态或让行紧急车辆。
可能的实现方式中,第一动作与至少一个第一目标设备的运动角度、运动速度、运动方向、振动频率中的至少一个相关。
可能的实现方式中,处理单元,具体用于:通过雷达检测第一动作以获取第一动作的信息;或者,获取来自雷达的第一动作的信息。
可能的实现方式中,第一动作的信息包括:第一动作对应的第一状态提示、第一动作对应的第一原始数据或第一动作对应的第一状态分解信息;其中,第一原始数据包括通过雷达检测第一动作而得到的数据矩阵;第一状态分解信息包括第一原始数据经过时频分析而得到的信息,第一状态提示由多个第一状态分解信息组成。
可能的实现方式中,处理单元,还用于:响应于第一终端的第一状态提示,控制第二终端执行操作。
可能的实现方式中,处理单元,具体用于:确定第二状态提示;控制第二终端中的至少一个第二目标设备执行第二动作,第二动作用于指示第二状态提示;其中,第二动作对应于第二状态提示。
可能的实现方式中,第二目标设备包括车灯、雨刷或车标中的至少一个。
第五方面,本申请实施例提供一种计算机可读存储介质,计算机可读存储介质中存储有计算机程序或指令,当计算机程序或指令在计算机上运行时,使得计算机执行如第一方面至第二方面的任意一种实现方式中描述的控制方法。
第六方面,本申请实施例提供一种包括指令的计算机程序产品,当指令在计算机上运行时,使得计算机执行第一方面至第二方面的任意一种实现方式中描述的控制方法。
第七方面,本申请实施例提供一种终端,该终端包括第三方面及第三方面的各种可能的实现方式中描述的控制装置,或者,包括第四方面及第四方面的各种可能的实现方式中描述的控制装置。
可能的实现方式中,该终端可以包括车辆等交通工具,车辆等交通工具可通过控制装置实施本申请实施例所描述的控制方法。其中,上述实施例所描述的控制装置包括但不限于:车载控制器、车载模块、车载模组、车载部件、车载芯片、车载单元、车载雷达或车载摄像头等其他传感器。
第八方面,本申请实施例提供一种控制装置,该装置包括处理器和存储介质,存储介质存储有指令,指令被处理器运行时,实现如第一方面至第二方面任意的实现方式描述的控制方法。
第九方面,本申请提供一种芯片或者芯片系统,该芯片或者芯片系统包括至少一个处理器和通信接口,通信接口和至少一个处理器通过线路互联,至少一个处理器用于运行计算机程序或指令,以进行第一方面至第二方面任意的实现方式中任一项所描述的控制方法。其中,芯片中的通信接口可以为输入/输出接口、管脚或电路等。
在一种可能的实现中,本申请中上述描述的芯片或者芯片系统还包括至少一个存储器,该至少一个存储器中存储有指令。该存储器可以为芯片内部的存储单元,例如,寄存器、缓存等,也可以是该芯片的存储单元(例如,只读存储器、随机存取存储器等)。
应当理解的是,本申请的第二方面至第九方面与本申请的第一方面的技术方案相对应,各方面及对应的可行实施方式所取得的有益效果相似,不再赘述。
附图说明
图1为本申请实施例提供的一种雷达应用场景的示意图;
图2为本申请实施例提供的一种传统FMCW毫米波雷达系统工作原理的示意图;
图3为本申请实施例提供的一种应用场景的示意图;
图4为本申请实施例提供的一种车辆的功能框图;
图5为本申请实施例提供的一种计算机系统的结构示意图;
图6为本申请实施例提供的一种控制方法的流程示意图;
图7为本申请实施例提供的一种雷达识别第一状态提示的示意图;
图8为本申请实施例提供的一种控制方法的流程示意图;
图9为本申请实施例提供的一种控制方法的流程示意图;
图10为本申请实施例提供的一种雨刷动作的示意图;
图11为本申请实施例提供的一种雨刷动作的示意图;
图12为本申请实施例提供的一种控制方法的流程示意图;
图13为本申请实施例提供的一种终端的结构示意图;
图14为本申请实施例提供的一种控制装置的结构示意图;
图15为本申请实施例提供的一种控制设备的硬件结构示意图;
图16为本申请实施例提供的一种芯片的结构示意图。
具体实施方式
为了便于清楚描述本申请实施例的技术方案,在本申请的实施例中,采用了“第一”、“第二”等字样对功能和作用基本相同的相同项或相似项进行区分。例如,第一信息和第二信息仅仅是为了区分不同的信息,并不对其先后顺序进行限定。本领域技术人员可以理解“第一”、“第二”等字样并不对数量和执行次序进行限定,并且“第一”、“第二”等字样也并不限定一定不同。
需要说明的是,本申请实施例中,“示例性的”或者“例如”等词用于表示作例子、例证或说明。本申请中被描述为“示例性的”或者“例如”的任何实施例或设计方案不应被解释为比其他实施例或设计方案更优选或更具优势。确切而言,使用“示例性的”或者“例如”等词旨在以具体方式呈现相关概念。
本申请实施例中,“至少一个”是指一个或者多个,“多个”是指两个或两个以上。“和/或”,描述关联对象的关联关系,表示可以存在三种关系,例如,A和/或B,可以表示:单独存在A,同时存在A和B,单独存在B的情况,其中A,B可以是单数或者复数。字符“/”一般表示前后关联对象是一种“或”的关系。“以下至少一项(个)”或其类似表达,是指的这些项中的任意组合,包括单项(个)或复数项(个)的任意组合。例如,a,b,或c中的至少一项(个),可以表示:a,b,c,a-b,a-c,b-c,或a-b-c,其中a,b,c可以是单个,也可以是多个。
随着社会的发展,智能汽车正在逐步进入人们的日常生活。其中,传感器在智能汽车的辅助驾驶和自动驾驶中发挥着十分重要的作用。
一方面,传感器可以随时感知周围环境,传感器通过收集周围环境的数据,进行移动物体的辨识与追踪;传感器也可以识别静止场景中的车道线或标示牌,并结合导航仪以及地图数据进行路径规划。
另一方面,传感器可以预先察觉可能发生的危险,从而传感器可以帮助车辆采取规避手段远离危险;或者,传感器可以自主采取规避手段帮助车辆远离危险,从而有效地增加了汽车驾驶的安全性和舒适性。
可能的方式中,传感器可以包括摄像头或雷达,示例性的,图1为本申请实施例提供的一种雷达应用场景的示意图,如图1,雷达可以安装在机动车辆、无人机、轨道车、自行车、信号灯、测速装置或基站等,基于雷达的不同的安装位置,基于雷达所要实现的功能也可能不同。例如,雷达安装在测速装置上时,主要用于监测道路上车辆的速度,以发现违规行驶的车辆;雷达安装在车辆尾灯时,主要用于检测在车辆倒车过程中有没有障碍物体,以防止发生事故。可以理解,雷达安装的位置和基于雷达所要实现的功能,可以根据实际应用场景设定,本申请实施例不作限定。
可能的方式中,雷达可以包括毫米波雷达、激光雷达或超声波雷达等,其中,毫米波是指波长在1mm-10mm之间的电磁波,毫米波对应的频率范围为30GHz-300GHz,在30GHz-300GHz的频率范围内,毫米波的特性可以包括带宽大、波长短、雷达分辨率高以及穿透强,毫米波的特性使其适合应用于车载领域。
带宽大意味着毫米波的频域资源丰富和毫米波的天线副瓣低,从而毫米波雷达有利于实现成像或准成像;波长短意味着毫米波雷达的设备体积和天线口径可以减小,从而毫米波雷达的重量可以减轻;穿透强意味着相比于激光雷达和光学系统,毫米波雷达更加具有穿透烟、灰尘或雾的能力,使得毫米波雷达可以全天候工作。因此,毫米波雷达可以广泛应用于车辆中。
可能的方式中,车载毫米波雷达系统可以包括振荡器(local oscillation,LO)、发射天线(transmit,TX)、接收天线(receive,RX)、混频器(mixer)、低通滤波器(low passfilter,LPF)、模数转换器(analog-to-digital converter,ADC)和数字信号处理器(digital signal processer,DSP)等装置。
示例性的,图2为本申请实施例提供的一种传统调频连续波(frequencymodulated continuous wave,FMCW)毫米波雷达系统工作原理的示意图。
如图2所示,LO会产生频率随时间线性增加的FMCW信号,一部分FMCW信号输入至混频器作为本振信号,一部分FMCW信号通过TX发射出去,信号遇到目标物体会产生反射,RX接收目标物体反射回来的回波信号或者其它空间中的电磁波,回波信号或者其它空间中的电磁波与本振信号在混频器中进行混频操作,混频操作后的信号经过LPF并经过ADC后得到中频采样信号,DSP对中频采样信号进行处理(例如,快速傅里叶变换和/或频谱分析等)可以得到目标物体的信息(例如,距离、速度和/或角度等)。
可能的情况中,物体或者该物体的任何组成结构,在物体主体结构的运动以外,可能还存在着微小运动(或者称为微动),微动的源头可能是一个摆动着手臂和大腿的行走的人、一个振动的表面、一架直升机的旋转的螺旋桨或一只拍打着翅膀的鸟。其中,微动可以包括振动、摆动、旋转、拍打或起伏波动。
微动可能会引起雷达发射信号在载频上时变的频率调制,这种时变的频率调制含有与载频、振动方向和入射信号方向之间的夹角、振动或转动速率等有关的谐波频率,因此,通过分析时变的频率调制可以得到目标物体的运动学性质,也可以作为目标物体进一步分类、识别和鉴别的特征。
可能的方式中,汽车可以通过雷达识别其它车辆的位置和速度,雷达基于位置和速度,利用跟踪算法可以估计出其他车辆的运动轨迹,这样,汽车可以得到其他车辆下一时刻的运动轨迹。但是,汽车通过雷达估计的运动轨迹,因为缺乏其他车辆在下一时刻对行驶意图的准确表达,使得雷达估计出的运动轨迹的精确度不高。
在自动驾驶或辅助驾驶中,汽车可以通过车载摄像头识别其它车辆的车灯(例如,转向灯)信息,从而汽车可以推断出其它车辆的行驶意图。但是,在炫光或者能见度不好(例如,雨、雪或大雾)的情况下,车辆摄像头对其它车辆的车灯信息的识别成功率下降,使得车载摄像头无法保证对其他车辆转向灯的识别准确率。
基于此,本申请实施例提供一种控制方法和装置,示例性的,第一车辆中的控制模块在确定第一状态提示后,可以控制第一终端中的至少一个第一目标设备执行第一动作;第二车辆可以获取该至少一个第一目标设备的第一动作的信息,并根据第一动作的信息,获取来自第一目标设备所在的第一终端的第一状态提示,这样,第二车辆中的控制模块所获取的第一状态提示是基于第一目标设备的第一动作指示的,可以减少环境能见度等的影响,从而第二车辆中的控制模块可以在任意环境中识别第一车辆的行驶意图和/或交通信息,进而第二车辆可以相应调整驾驶策略,提高车辆驾驶的安全性和舒适性。
本申请实施例的控制方法可以应用于车辆、车辆中的芯片或车辆中的控制模块等,车辆、车辆中的芯片或车辆中的控制模块可以基于本申请实施例的方法,向其他车辆表达第一状态提示。
示例性的,图3为本申请实施例提供的一种应用场景的示意图,如图3所示,第一车辆和第二车辆在不同的车道上行驶,若第一车辆需要右并线到与第二车辆相同的车道上,第一车辆可以控制至少一个第一目标设备执行用于指示右并线的动作,第二车辆根据第一目标设备的动作得到的第一车辆的右并线的行驶意图后,第二车辆可以相应调整行驶速度或行驶路线,避免第一车辆向右转向到与第二车辆相同的行驶路线的同时,第二车辆加速行驶而和第一车辆之间发生碰撞,以提高车辆驾驶的安全性。
在图3所描述的应用场景的基础上,图4为本申请实施例提供的一种可能的车辆400的功能框图,车辆400可以为第一车辆,也可以为第二车辆。可以理解,第一车辆或第二车辆的内部结构也可以与图4所示的内部结构不同,本申请实施例对此不作具体限定。
如图4所示,车辆400可以被配置为完全或部分地自动驾驶模式。例如,车辆400可以为轿车、卡车、摩托车、公共汽车、割草机、娱乐车、游乐场车辆、施工设备、电车、高尔夫球车、火车或手推车等,本申请实施例不作具体限定。
可能的方式中,当车辆400处于部分地自动驾驶模式时,车辆400确定车辆及其周边环境的当前状态后,车辆用户基于该当前状态操作车辆400。例如,车辆400确定周边环境中的至少一个其他车辆的可能行为,将该可能行为以语音的方式通知给车辆用户,车辆用户基于该语音操作车辆400。
可能的方式中,在车辆400处于完全地自动驾驶模式中时,车辆400可以自动执行驾驶相关操作。例如,车辆400确定周边环境中的至少一个其他车辆的可能行为,并确定该其他车辆执行可能行为自动执行驾驶车辆400的相关操作。
如图4所示,车辆400包括:行进系统202、传感器系统204、控制系统206、一个或多个外围设备208、计算机系统212、电源210以及用户接口216。可选地,车辆400可包括更多或更少的子系统,并且每个子系统可包括多个元件。其中,车辆400的每个子系统和元件可以通过有线或者无线互连。
在图4中,行进系统202包括:引擎218、传动装置220、能量源219及车轮221。
可能的方式中,传感器系统204包括感测关于车辆400周边的环境的信息的若干个传感器。例如,传感器系统204可包括:定位系统222、惯性测量单元(inertial measurementunit,IMU)224、毫米波雷达226、激光雷达228以及摄像头230。其中,定位系统222可以是全球定位系统(global positioning system,GPS),也可以是北斗系统或者其他定位系统。
可能的方式中,定位系统222可用于估计车辆400的地理位置,IMU 224用于基于惯性加速度感测车辆400的位置和朝向变化。在一些实施例中,IMU 224可以是加速度计和陀螺仪的组合。
可选的,传感器系统204还可以包括:被监视车辆400的内部系统的传感器(例如,车内空气质量监测器、燃油量表和/或机油温度表等)。来自这些传感器中的一个或多个的传感器数据可用于检测和识别对象及其相应特性(例如,位置、形状、方向和/或速度等),这种检测和识别是车辆400进行自主安全操作的关键功能。
可能的方式中,毫米波雷达226可利用无线电信号感测车辆400的周边环境内的物体。例如,第二车辆可以通过毫米波雷达226感测第一车辆内的至少一个第一目标设备,并检测至少一个第一目标设备执行的第一动作,以获取第一动作对应的第一状态提示。在一些实施例中,除了感测物体以外,毫米波雷达226还可用于感测物体的速度和/或前进方向。
可能的方式中,激光雷达228可利用激光感测车辆400所位于的环境中的物体。在一些实施例中,激光雷达228可包括一个或多个激光源、激光扫描器以及一个或多个检测器,以及其他系统组件。
可能的方式中,摄像头230可用于捕捉车辆400的周边环境的多个图像。例如,摄像头230可以捕捉第一车辆周围的环境数据或图像数据,第一车辆基于环境数据或图像数据,确定第一车辆的能见度低于阈值,从而第一车辆可以控制至少一个第一目标设备执行第一动作,其中,摄像头230可以是静态摄像头或视频摄像头。
在图4中,控制系统206为控制车辆400及其组件的操作,控制系统206可包括各种元件。例如,控制系统206可包括:转向系统232、油门234、制动单元236、计算机视觉系统240、路线控制系统242以及障碍规避系统244中的至少一个。可以理解的是,在一些实例中,控制系统206可以增加或替换地包括除了所示出和描述的那些以外的组件,或者也可以减少一部分上述示出的组件。
可能的方式中,计算机视觉系统240可以处理和分析由摄像头230捕捉的图像,以便计算机视觉系统240识别车辆400周边环境中的物体和/或物体的特征。其中,物体和/或物体的特征可包括:交通信号、道路边界或障碍物。计算机视觉系统240可使用物体识别算法、运动中恢复结构(structure from motion,SFM)算法、视频跟踪和其他计算机视觉技术。在一些实施例中,计算机视觉系统240可以用于为环境绘制地图、跟踪物体、估计物体的速度等。
可能的方式中,路线控制系统242可用于确定车辆400的行驶路线,障碍规避系统244可用于识别、评估和避开或者以其他方式越过车辆400的环境中的潜在障碍物。
车辆400通过外围设备208与外部传感器、其他车辆、其他计算机系统或用户之间进行交互。例如,外围设备208可包括:无线通信系统246、车载电脑248、麦克风250以及扬声器252。可能的方式中,无线通信系统246可以直接地或者经由通信网络与一个或多个设备无线通信。
车辆400的部分或所有功能受计算机系统212控制。计算机系统212可包括至少一个处理器213,处理器213执行存储在数据存储装置214中的指令215。计算机系统212还可以是采用分布式方式,控制车辆400的个体组件或子系统的多个计算设备。
可能的方式中,处理器213可以是任何常规的处理器,诸如商业可获得的中央处理器(central processing unit,CPU)。替选地,该处理器可以是诸如用于供专门应用的集成电路(application specific integrated circuit,ASIC)或其它基于硬件的处理器的专用设备。在此处所描述的各个方面中,处理器213可以位于远离该车辆且与该车辆进行无线通信的位置。在其它方面中,此处所描述的一些过程可以由布置于车辆内的处理器上执行,而此处所描述的另一些过程可以由远程处理器执行,这些过程包括采取执行单一操纵的必要步骤。
可能的方式中,数据存储装置214可包含指令215(例如,程序逻辑指令),指令215可被处理器213处理,以便处理器213执行车辆400的各种功能,这些功能包括以上所描述的功能。数据存储装置214也可包含额外的指令,包括向推进系统202、传感器系统204、控制系统206和外围设备208中的一个或多个发送数据、从其接收数据、与其交互和/或对其进行控制的指令。
除了指令215以外,数据存储装置214还可存储数据,例如道路地图、路线信息、车辆的位置、方向、速度以及其它这样的车辆数据,以及其他信息。这种信息可在车辆400在自主、半自主和/或手动模式中操作期间被车辆400和计算机系统212使用。
可能的方式中,用户接口216,用于向车辆400的用户提供信息或从其接收信息。可选地,用户接口216可包括在外围设备208的集合内的一个或多个输入/输出设备,例如无线通信系统246、车载电脑248、麦克风250和扬声器252。
计算机系统212可基于从各种子系统(例如,行进系统202、传感器系统204和控制系统206)以及从用户接口226接收的输入来控制车辆400的功能。例如,计算机系统212可利用来自控制系统206的输入,以便控制转向系统232避免由传感器系统204和障碍规避系统244检测到的障碍物。在一些实施例中,计算机系统212可对车辆400及其子系统的许多方面提供控制。
可选地,上述这些组件中的一个或多个可与车辆400分开安装或关联。例如,数据存储装置214可以部分或完全地与车辆400分开存在。上述组件可以按有线和/或无线方式耦合在一起。
可选地,上述组件只是一个示例,实际应用中,上述各个模块中的组件有可能根据实际需要增添或者删除,图4不应理解为对本申请实施例的限制。
除了提供调整自动驾驶汽车的速度或行驶路线的指令之外,计算设备还可以提供修改车辆400的转向角的指令,以使得自动驾驶汽车遵循给定的轨迹和/或维持与自动驾驶汽车附近的障碍物(例如,道路上的相邻车道中的车辆)的安全横向和纵向距离。
为了更好地描述图4中所示的计算机系统212,示例性的,图5为计算机系统212的结构示意图。
如图5所示,计算机系统212包括处理器213、显示适配器(video adapter)107、收发器123、摄像头155和通用串行总线(universal serial bus,USB)端口125等中的至少一个。其中,收发器123可以发送和/或接受无线电通信信号,摄像头155可以捕捉静态数字视频图像和动态数字视频图像。
可能的方式中,处理器213和系统总线105耦合,系统总线105通过总线桥111和输入输出(input/output,I/O)总线耦合,I/O总线和I/O接口115耦合,I/O接口115可以和多种I/O设备进行通信。例如,I/O设备可以为输入设备117(如:键盘,鼠标,触摸屏等)或多媒体盘(media tray)121(例如,紧凑型光盘只读储存器(compact disc read-only memory,CD-ROM)、多媒体接口等)。可选的,和I/O接口115相连接的接口可以是通用串行总线(universal serial bus,USB)接口。
可能的方式中,处理器213可以是一个或者多个处理器,其中每个处理器都可以包括一个或多个处理器核;处理器113可以是任何传统处理器,包括精简指令集计算机(reduced instruction set computing,RISC)、复杂指令集计算机(complex instructionset computing,CISC)或上述的组合。
可选地,处理器可以是诸如专用集成电路(application specific integratedcircuit,ASIC)的专用装置;或者,处理器213可以是神经网络处理器或者是神经网络处理器和上述传统处理器的组合。
可选地,在本申请所描述的各种实施例中,计算机系统212可位于远离自动驾驶车辆的地方,并且可与自动驾驶车辆无线通信。在其它方面,本申请所描述的一些过程可以设置在自动驾驶车辆内的处理器上执行,其它的过程由远程处理器执行,该过程包括采取执行单个操纵所需的动作。
可能的方式中,计算机系统212可以通过网络接口129和软件部署服务器149通信。例如,网络接口129可以是硬件网络接口(例如,网卡)。网络127可以是外部网络(例如,因特网),也可以是内部网络(例如,以太网或者虚拟专用网络(virtual private network,VPN))。可选地,网络127还可以是无线网络(例如,无线保真(wireless-fidelity,WiFi)网络,蜂窝网络)。
可能的方式中,应用程序143包括控制汽车自动驾驶相关程序147。例如,自动驾驶相关的程序147可以包括管理自动驾驶的汽车和路上障碍物交互的程序、控制自动驾驶汽车路线或者速度的程序、控制自动驾驶汽车和路上其他自动驾驶汽车交互的程序等。
应用程序143可以存在于软件部署服务器(deploying server)149的系统上。在一些实施例中,在需要执行应用程序143时,计算机系统可以从软件部署服务器149下载应用程序143。
传感器153和计算机系统212关联,传感器153用于探测计算机系统212周围的环境。例如,传感器153可以探测动物、汽车、障碍物或人行横道等物体;进一步地,传感器还可以探测上述动物、汽车、障碍物或人行横道等物体周围的环境,例如,环境可以为动物周围的天气条件、动物周围的环境的光亮度、动物周围出现的其他动物等。可选地,若计算机系统212安装在自动驾驶的汽车上,传感器可以是摄像头,红外线感应器,化学检测器,麦克风等。图5也仅仅是是一种示例性的展示,不对本申请的方案造成限制。
下面以具体的实施例对本申请实施例的技术方案以及本申请实施例的技术方案如何解决上述技术问题进行详细说明。下面这几个具体的实施例可以独立实现,也可以相互结合,对于相同或相似的概念或过程可能在某些实施例中不再赘述。
需要说明的是,下面所描述的步骤的执行主体可以是车辆、车辆中的芯片或车辆中的控制模块等,为了便于描述,以执行主体为车辆中的控制模块为例对下述具体实施例进行示例性说明,第一车辆中的控制模块称为第一控制模块,第二车辆中的控制模块称为第二控制模块。
其中,第一控制模块或第二控制模块可以为多域控制器(multi domaincontroller,MDC),可以为不集成在MDC且可以控制MDC的模块,也可以为集成在MDC中的模块。可以理解,第一控制模块或第二控制模块的具体内容,也可以根据实际应用场景设定,本申请实施例不作限定。以下多以MDC为例进行示例性说明。
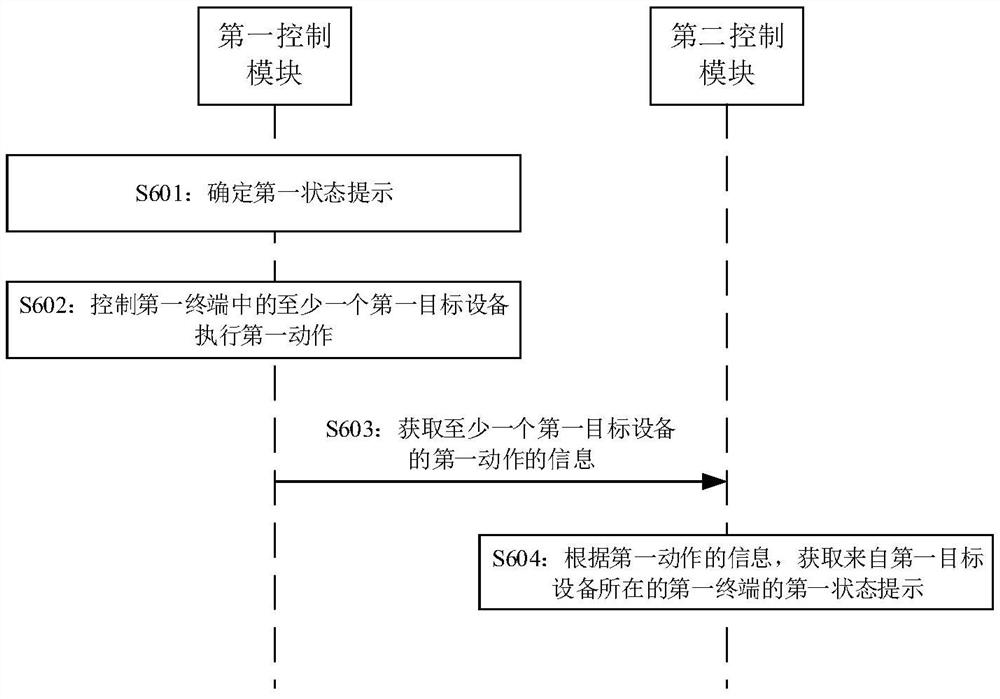
图6为本申请实施例提供的一种控制方法的流程示意图,如图6所示,可以包括以下步骤:
S601:第一控制模块确定第一状态提示。
本申请实施例中,第一状态提示可以包括行驶意图和/或交通信息等。行驶意图可以指第一车辆的行驶意图,行驶意图可以包括转向、并线、掉头或靠边停车或起步等。交通信息可以指第一车辆周围的路况信息,交通信息可以包括道路拥堵、事故发生、车辆紧急状态或让行紧急车辆等。可以理解,第一状态提示的具体内容可以根据实际应用场景设定,本申请实施例对此不作具体限定。
本申请实施例中,在第一控制模块为MDC时,MDC确定第一状态提示,可以包括以下实现方式:
一种实现中,在第一状态提示包括行驶意图时,确定行驶意图。例如,第一车辆出现故障时,MDC所确定的行驶意图可以为靠边停车。可以理解,MDC确定行驶意图的具体实现方式,可以根据实际应用场景设定,本申请实施例对此不作具体限定。
又一种实现中,在第一状态提示包括交通信息时,确定交通信息。例如,MDC可以通过传感器系统感知当前道路的交通拥堵情况,从而MDC确定该交通信息为道路拥堵。可以理解,MDC确定交通信息的具体实现方式,可以根据实际应用场景设定,本申请实施例对此不作具体限定。
再一种实现中,在第一状态提示包括行驶意图和交通信息时,确定行驶意图和交通信息。例如,在第一车辆即将进入该道路前,MDC通过地图得到道路的交通拥堵情况,需要控制第一车辆调头驶入另一条道路,则MDC确定该交通信息为道路交通拥堵,行驶意图为掉头。可以理解,MDC确定行驶意图和交通信息的具体实现方式,可以根据实际应用场景设定,本申请实施例对此不作具体限定。
本申请实施例中,在第一控制模块为不集成在MDC且可以控制MDC的模块时,第一控制模块确定第一状态提示的实现方式,包括:第一控制模块可以通过控制MDC,使得MDC确定第一状态提示,MDC确定第一状态提示的实现方式可以参照前述步骤的内容适应描述,在此不再赘述。
本申请实施例中,在第一控制模块为集成在MDC中的模块时,第一控制模块确定第一状态提示的实现方式,与前述步骤所描述的MDC确定第一状态提示的实现方式类似,在此不再赘述。
S602:第一控制模块控制第一终端中的至少一个第一目标设备执行第一动作。
本申请实施例中,第一终端可以为第一车辆,第一车辆包括至少一个第一目标设备;或者,第一终端也可以为安装在第一车辆上的设备,该设备包括至少一个第一目标设备以及接收控制指令的控制装置,基于该控制指令,第一控制模块可以控制至少一个第一目标设备执行第一动作。可以理解,第一终端的安装位置以及第一终端包括的装置的具体内容,可以根据实际应用场景设定,本申请实施例对此不作限定。
本申请实例中,第一目标设备相对第一车辆具备运动的功能,例如,第一目标设备执行的第一动作可以包括转动、摆动、振动或起伏波动中的至少一个等。可以理解,第一目标设备执行第一动作的频率以及第一动作的具体内容可以根据实际应用场景设定,本申请实施例对此不作具体限定。
本申请实施例中,第一动作用于指示第一状态提示,第一状态提示是通过所执行的第一动作所表达的,基于第一动作,第一控制模块可以向外传递第一状态提示;第一控制模块控制第一目标设备执行的第一动作不同时,第一控制模块向外传递的第一状态提示也不同,或者可以理解为,第一动作对应于第一状态提示,基于不同的第一动作,第一目标设备可以向外传递不同的第一状态提示。
本申请实施例中,第一动作与第一状态提示之间存在预先定义或者配置的对应关系,该对应关系可以存储在第一车辆和第二车辆中。例如,在第一车辆中的至少一个第一目标设备执行第一动作后,第二控制模块可以通过雷达检测该第一动作,获取第一动作的信息,并通过第一动作与第一状态提示之间存在的对应关系,第二控制模块可以得到第一目标设备所要表达的第一状态提示。
一种实现中,在第一动作与第一状态提示之间存在预先定义的对应关系时,该对应关系可以是第一控制模块定义的。例如,第一控制模块控制第一车辆转向时,第一车辆中的第一目标设备可能处于摆动状态,则第一控制模块定义的第一状态提示可以为转向,以及定义的第一动作可以为摆动。可以理解,第一控制模块定义的第一动作与第一状态提示之间的对应关系的具体内容,可以根据实际应用场景设定,本申请对此不作限定。
又一种实现中,在第一动作与第一状态提示之间存在预先配置的对应关系时,可以由云端预先配置第一动作与第一状态提示之间的对应关系,云端将对应关系传输给第一车辆和第二车辆,第一车辆和第二车辆储存对应关系。可以理解,云端配置的第一动作与第一状态提示之间的对应关系的具体内容,可以根据实际应用场景设定,本申请实施例对此不作具体限定。
再一种实现中,在第一动作与第一状态提示之间存在预先定义与预先配置的对应关系时,该对应关系可以为一个集合,该集合中包括多个对应关系,每个对应关系中包括一个第一动作和一个第一状态提示。例如,该集合中可以包括第一控制模块预先定义的对应关系,以及云端预先配置的对应关系。
具体的,在第一控制模块为MDC时,MDC控制第一终端中的至少一个第一目标设备执行第一动作,可以包括以下实现方式:
一种实现中,MDC控制第一终端中的一个第一目标设备执行第一动作。例如,在MDC确定道路交通拥堵时,MDC控制一个第一目标设备执行第一动作,从而第二控制模块可以根据第一目标设备执行的第一动作的信息,得到第一目标设备所要表达的第一状态提示。
又一种实现中,MDC控制第一终端中的多个第一目标设备执行第一动作。例如,在MDC确定道路交通拥堵时,MDC可以控制多个第一目标设备执行第一动作,多个第一目标设备执行的第一动作相同,第二控制模块没有获取到其中一个第一目标设备执行的第一动作的信息时,可以从另一个第一目标设备执行的第一动作来获取第一动作的信息,从而第二控制模块得到多个第一目标设备所要表达的相同的第一状态提示。这里的多个第一目标设备的类型可以相同或者不同。
再一种实现中,MDC控制第一终端中的多个第一目标设备执行不同的动作,多个不同的动作组合为第一动作。例如,在MDC确定道路交通拥堵时,MDC可以控制多个第一目标设备按照时间顺序先后执行不同的动作,多个时间段的不同动作组成第一动作,从而第二控制模块获取第一动作的信息,得到多个第一目标设备执行不同动作所要表达的第一状态提示。这里的多个第一目标设备的类型可以相同或者不同。
具体的,在第一控制模块为不集成在MDC且可以控制MDC的模块时,第一控制模块控制第一终端中的至少一个第一目标设备执行第一动作,包括:第一控制模块通过控制MDC,使得MDC控制第一终端中的至少一个第一目标设备执行第一动作,MDC控制第一终端中的至少一个第一目标设备执行第一动作的实现方式可以参照前述步骤的描述,在此不再赘述。
具体的,在第一控制模块为不集成在MDC且可以控制MDC的模块时,第一控制模块控制第一终端中的至少一个第一目标设备执行第一动作的实现方式,与前述步骤所描述的MDC控制第一终端中的至少一个第一目标设备执行第一动作的实现方式类似,在此不再赘述。
S603:第二控制模块获取至少一个第一目标设备的第一动作的信息。
本申请实施例中,第二控制模块获取至少一个第一目标设备的第一动作的信息,第二控制模块需要跟踪到第一目标设备。例如,第二车辆上的雷达可以通过距离速度二维傅里叶变换的方法,得到第一目标设备对应的距离速度图,雷达通过恒虚警算法对距离速度图进行检测得到第一目标设备对应的点云目标检测结果,再通过角度傅里叶变换得到第一目标设备的点云目标的角度,雷达通过聚类算法将点云目标聚类成目标,从而雷达基于多帧数据,利用跟踪算法跟踪到第一目标设备。之后,基于第一目标设备的多帧数据,进一步进行额外的数字信号处理,如短时傅里叶变换、小波变换这类时频分析方法分析得到第一目标设备的第一动作的信息。
本申请实施例中,第一动作的信息用于第二控制模块获取第一目标设备所在的第一车辆的第一状态提示,第二控制模块获取的第一动作的信息可以包括:第一动作对应的第一状态提示、第一动作对应的第一原始数据或第一动作对应的第一状态分解信息。可以理解,第一动作的信息的具体内容,可以根据实际应用场景设定,本申请实施例对此不作具体限定。
本申请实施例中,在第二车辆行驶过程中,第二控制模块可以通过雷达检测第二车辆周围的目标,当检测到至少一个第一目标设备执行的第一动作时,第二控制模块可以获取至少一个第一目标设备的第一动作的信息。
具体的,在第二控制模块为MDC时,MDC获取至少一个第一目标设备的第一动作的信息,可以包括以下实现方式:
一种实现中,在第一动作的信息包括第一动作对应的第一状态提示时,第一状态提示为通过雷达检测第一动作而得到的。
示例性的,图7为本申请实施例提供的一种雷达识别第一状态提示的示意图,如图7所示,第二车辆上的雷达可以将发出的一部分信号作为本振信号,一部分信号通过发射天线发射出去,并经第一目标设备反射回来的由接收天线接收的信号作为回波信号,雷达将本振信号与回波信号依次进行混频处理、LPF处理以及ADC处理后,雷达得到中频采样信号,雷达通过对中频采样信号进行时频分析得到区别于第一车辆运动的第一动作的微多普勒特征,雷达将第一动作的微多普勒特征导入训练好的神经网络或者其它分类识别功能算法模块,进行第一动作的分类识别,从而获取第一动作对应的第一状态提示。其中,第一动作的微多普勒特征可以看做是第一动作在多普勒域上的图像。
又一种实现中,在第一动作的信息包括第一原始数据时,第一原始数据为通过雷达检测第一目标设备而得到的数据矩阵。
示例性的,第二车辆上的雷达可以将发出的一部分信号作为本振信号,一部分经第一动作发射回来的信号作为回波信号,雷达将本振信号与回波信号依次进行混频处理、LPF处理以及ADC处理后,雷达得到中频采样信号,雷达通过对中频采样信号进行二维傅立叶变换后,可以得到二维傅立叶变换后的数据矩阵。
再一种实现中,在第一动作的信息包括第一状态分解信息时,第一状态分解信息为第一原始数据经过时频分析而得到的信息,第一状态提示由多个第一状态分解信息组成。例如,第一状态分解信息可以为多个符号或者多个向量组成的集合,该集合表示不同时刻区别于第一车辆运动的第一动作的微多普勒特征。
示例性的,第二车辆上的雷达可以通过时频分析方法(例如,短时傅里叶变换或小波变换)对第一原始数据进行处理,使得雷达可以提取区别于第一车辆运动的第一动作的多个微多普勒特征。
具体的,在第二控制模块为不集成在MDC且可以控制MDC的模块时,第二控制模块获取至少一个第一目标设备的第一动作的信息,包括:第二控制模块通过控制MDC,使得MDC可以获取至少一个第一目标设备的第一动作的信息,MDC获取至少一个第一目标设备的第一动作的信息的实现方式和前述步骤描述的内容类似,在此不再赘述。
具体的,在第二控制模块为集成在MDC中的模块时,第二控制模块获取至少一个第一目标设备的第一动作的信息的实现方式,与前述步骤所描述的MDC获取至少一个第一目标设备的第一动作的信息的实现方式类似,在此不再赘述。
S604:第二控制模块根据第一动作的信息,获取来自第一目标设备所在的第一终端的第一状态提示。
本申请实施例中,在第二控制模块为MDC时,MDC根据第一动作的信息,获取来自第一目标设备所在的第一车辆的第一状态提示,可以包括以下实现方式:
一种实现中,在第一动作的信息包括第一动作对应的第一状态提示时,MDC通过雷达获取来自第一目标设备所在的第一车辆的第一状态提示,从而MDC可以得到第一车辆向外传递的行驶意图和/或交通信息。
又一种实现中,在第一动作的信息包括第一原始数据时,MDC可以根据第一原始数据,获取来自第一目标设备所在的第一车辆的第一状态。
示例性的,MDC可以通过时频分析方法(例如,短时傅里叶变换或小波变换)对第一原始数据进行处理,从而MDC提取区别于第一车辆运动的第一动作的微多普勒特征,MDC将微多普勒特征导入训练好的神经网络或者其他具有分类识别功能的算法模块,进行第一动作的分类识别,得到第一原始数据对应的第一状态提示。
再一种实现中,在第一动作的信息包括第一状态分解信息时,MDC可以根据第一状态分解信息,获取来自第一目标设备所在的第一车辆的第一状态提示。
示例性的,MDC可以将区别于第一车辆运动的多个时刻的第一动作的微多普勒特征进行组合,并将组合后的微多普勒特征导入训练好的神经网络或者具有分类识别功能的算法模块,进行第一动作的分类识别,从而可以得到第一状态提示。
本申请实施例中,在第二控制模块为不集成在MDC且可以控制MDC的模块时,第二控制模块根据第一动作的信息,获取来自第一目标设备所在的第一终端的第一状态提示,包括:第二控制模块通过控制MDC,使得MDC获取来自第一目标设备所在的第一终端的第一状态提示,MDC获取来自第一目标设备所在的第一终端的第一状态提示的实现方式,可以参照前述步骤的描述,在此不再赘述。
本申请实施例中,在第二控制模块为集成在MDC中的模块时,第二控制模块获取第一状态提示的实现方式,与前述步骤所描述的MDC获取来自第一目标设备所在的第一终端的第一状态提示的实现方式类似,在此不再赘述。
综上所述,本申请实施例中,第一控制模块确定第一状态提示后,控制至少一个第一目标设备执行第一动作,第二控制模块获取第一动作的信息,并根据第一动作的信息,获取来自第一目标设备所在的第一终端的第一状态提示,第二控制模块所获取的第一状态提示是基于第一目标设备的第一动作指示的,可以减少环境能见度等的影响,从而第二车辆可以在任意环境中识别第一车辆的行驶意图和/或交通信息,第二控制模块基于行驶意图和/或交通信息,控制第二车辆相应调整驾驶策略,从而提高车辆驾驶的安全性和舒适性。
在图6对应的实施例的基础上,示例性的,图8为本申请实施例提供的一种控制方法的流程示意图,如图8所示,可以包括以下步骤:
S801:第一控制模块确定第一状态提示。
S802:第一控制模块控制第一终端中的至少一个第一目标设备执行第一动作。
本申请实施例中,第一控制模块可以根据环境信息等,决策采用至少一个第一目标设备传递第一状态提示,并控制第一终端中的至少一个第一目标设备执行第一动作。
例如,环境信息可以包括第一车辆行驶过程中的环境中的天气信息等,例如,天气信息可以包括:下雨、下雪、有雾、有风、风力或降水量等,所述环境信息可以通过任何可能的方式获取,本申请不做限定。可以理解,环境信息的具体内容可以根据实际应用场景设定,本申请实施例对此不作具体限定。
本申请实施例中,在第一控制模块为MDC时,MDC根据环境信息,控制第一终端中的至少一个第一目标设备执行第一动作,可以包括以下实现方式:
一种实现中,在第一控制模块为MDC时,MDC获取第一终端周围的图像数据,MDC根据图像数据确定第一终端周围的能见度低于阈值。可以理解,阈值的具体值可以根据实际应用场景设定,本申请实施例对此不作具体限定。
示例性的,MDC可以通过摄像头采集第一终端周围的图像数据,并对图像数据进行分析得到第一终端周围的环境为大雪环境,大雪会影响视线,从而MDC确定第一终端周围的能见度低于阈值。
又一种实现中,在第一控制模块为MDC时,MDC获取第一终端周围的天气信息,MDC根据天气信息确定第一终端周围的能见度低于阈值。
示例性的,MDC可以通过网络得到天气信息,例如,MDC可以从网络得到当前的天气信息为大雨天气,且降水量大于或等于第二阈值,从而MDC确定第一终端周围的能见度低于阈值。可以理解,降水量的具体值以及第二阈值的具体值可以根据实际应用场景设定,本申请实施例对此不作具体限定。
示例性的,MDC可以通过设置在第一车辆中的雨量传感器得到天气信息,例如,MDC可以从雨量传感器得到当前的天气信息为大雨天气,且降水量大于或等于第三阈值,从而MDC确定第一终端周围的能见度低于阈值。可以理解,降水量的具体值以及第三阈值的具体值可以根据实际应用场景设定,本申请实施例对此不作具体限定。
再一种实现中,在第一控制模块为MDC时,MDC获取第一终端周围的图像数据以及天气信息,MDC根据图像数据以及天气信息,确定第一终端周围的能见度低于阈值。
示例性的,MDC可以通过摄像头采集的图像数据,确定第一终端周围的环境为下雨环境;同时,MDC通过网络确定降水量,且降水量大于或等于第四阈值,从而MDC确定第一终端周围的能见度低于阈值。可以理解,第四阈值的具体值可以根据实际应用场景设定,本申请实施例对此不作具体限定。
本申请实施例中,在第一控制模块为不集成在MDC且可以控制MDC的模块时,第一控制模块控制第一终端中的至少一个第一目标设备执行第一动作包括:第一控制模块通过控制MDC,使得MDC控制第一终端中的至少一个第一目标设备执行第一动作,MDC控制第一终端中的至少一个第一目标设备执行第一动作的实现方式可以参照前述步骤的描述,在此不再赘述。
本申请实施例中,在第一控制模块为集成在MDC中的模块时,第一控制模块控制第一终端中的至少一个第一目标设备执行第一动作的实现方式,与前述步骤所描述的MDC控制第一终端中的至少一个第一目标设备执行第一动作的实现方式类似,在此不再赘述。
S803:第一控制模块控制第一终端中的至少一个第一处理装置执行第一处理。
本申请实施例中,第一处理装置可以包括车灯等,车灯用于执行第一处理,车灯可以包括:前转向灯、后转向灯、后雾灯、侧面转向灯、刹车灯或日间行车灯等,第一处理可以为车灯常亮、车灯连续闪烁或车灯不连续闪烁等。可以理解,第一处理装置的具体内容以及第一处理的具体内容,可以根据实际应用场景设定,本申请实施例对此不作具体限定。
本申请实施例中,在第一控制模块为MDC时,MDC控制第一终端中的至少一个第一目标设备执行第一动作,可以包括以下实现方式:
一种实现中,MDC控制第一终端中的一个第一处理装置执行第一处理。例如,在MDC确定道路交通拥堵时,MDC控制日间行车灯连续闪烁3次,车灯连续闪烁所要表达的第一状态提示为道路拥堵。可以理解,车灯连续闪烁的频率和次数,可以根据实际应用场景设定,本申请实施例对此不作具体限定。
又一种实现中,MDC控制第一终端中的多个第一处理装置执行第一处理。例如,第一车辆出现故障时,MDC控制日间行车灯常亮,以及控制后转向灯不连续闪烁5次,日间行车灯常亮以及后转向灯不连续闪烁5次所要表达的第一状态提示为靠边停车。可以理解,常亮的时间以及不连续闪烁的频率和次数,可以根据实际应用场景设定,本申请实施例对此不作具体限定。
需要说明的是,MDC在控制第一终端中的至少一个第一目标设备执行第一动作的同时,可以控制第一终端中的至少一个第一处理装置执行第一处理,第一处理和第一动作对应相同的第一状态提示,这样,MDC除了通过第一处理装置执行的第一处理显式地传递第一状态提示,也可以通过第一目标设备执行的第一动作隐式地传递第一状态提示,从而提高了传递第一状态提示的准确率。
本申请实施例中,在第一控制模块为不集成在MDC且可以控制MDC的模块时,第一控制模块控制第一终端中的至少一个第一处理装置执行第一处理,包括:第一控制模块通过控制MDC,使得MDC可以控制第一终端中的至少一个第一处理装置执行第一处理,MDC控制第一终端中的至少一个第一处理装置执行第一处理的实现方式可以参照前述步骤的描述,在此不再赘述。
本申请实施例中,在第一控制模块为集成在MDC中的模块时,第一控制模块控制第一终端中的至少一个第一处理装置执行第一处理的实现方式,与MDC控制第一终端中的至少一个第一处理装置执行第一处理的实现方式类似,在此不再赘述。
S804:第二控制模块获取至少一个第一目标设备的第一动作的信息。
本申请实施例中,第二控制模块可以通过雷达检测第一动作,以获取第一动作的信息;或者,第二控制模块获取来自雷达的第一动作的信息,第二控制模块获取第一动作的信息的具体实现,可以参考S603的内容适应描述,在此不再赘述。
S805:第二控制模块根据第一动作的信息,获取来自第一目标设备所在的第一终端的第一状态提示。
S806:第二控制模块响应于第一终端的第一状态提示,控制第二终端执行操作。
本申请实施例中,第二终端可以为第二车辆,或者,第二终端也可以为安装在第二车辆上的设备,第二控制模块基于第一状态提示,可以控制第二终端适应调整驾驶策略。可以理解,第二终端的安装位置可以根据实际应用场景设定,本申请实施例对此不作限定。
本申请实施例中,第二控制模块响应于第一终端的第一状态提示,控制第二终端执行操作,可以包括以下实现方式:
一种实现中,在第二控制模块为MDC时,MDC响应于第一状态提示,控制第二终端执行操作。例如,MDC获取的第一状态提示为前方道路拥堵,MDC控制第二车辆掉头驶入另一条道路。
又一种实现中,在第二控制模块为不集成在MDC且可以控制MDC的模块时,第二控制模块可以通过控制MDC,使得MDC可以响应于第一状态提示,从而MDC控制第二终端执行操作。例如,第二控制模块获取的第一状态提示为前方道路拥堵,第二控制模块通过控制MDC,使得MDC控制第二车辆掉头驶入另一条道路。
再一种实现中,在第二控制模块为集成在MDC中的模块时,第二控制模块响应于第一状态提示,控制第二终端执行操作。例如,第二控制模块获取的第一状态提示为前方道路拥堵,由于第二控制模块集成在MDC中,因而MDC可以获取该第一状态提示,从而MDC可以控制第二车辆掉头驶入另一条道路。
需要说明的是,在第二终端为第二车辆且第二车辆中无MDC时,第二控制模块通过控制电子控制单元(electronic control unit,ECU),使得ECU控制第二车辆执行操作。可以理解,第二控制模块控制ECU以及ECU控制第二车辆的具体实现方式,可以根据实际应用场景设定,本申请实施例不作限定。
S807:第二控制模块确定第二状态提示。
本申请实施例中,第二控制模块确定第二状态提示的实现方式,与第一控制模块确定第一状态提示的实现方式类似,在此不再赘述。可以理解,第二控制模块确定第二状态提示的实现方式,也可以根据实际应用场景采用其他的方式,本申请实施例不作限定。
S808:第二控制模块控制第二终端中的至少一个第二目标设备执行第二动作。
本申请实施例中,第二动作用于指示第二状态提示,第二状态提示是通过所执行的第二动作所表达的,基于第二动作,第二控制模块可以向外传递第二状态提示;第二控制模块控制第二目标设备执行的第二动作不同时,第二控制模块向外传递的第二状态提示也不同,或者可以理解为,第二动作对应于第二状态指示,基于不同的第二动作,第二目标设备可以向外传递不同的第二状态提示。
本申请实施例中,第二目标设备可以包括车灯、雨刷或车标中的至少一个,第二控制模块控制第二目标设备执行第二动作的实现方式,与第一控制模块控制第一目标设备执行第一动作的实现方式类似,在此不再赘述。可以理解,第二目标设备的具体内容以及第二控制模块控制第二目标设备执行第二动作的实现方式,也可以根据实际应用场景采用其他的方式,本申请实施例不作限定。
需要说明的是,在第二目标设备包括车灯时,第二控制模块控制车灯执行第二动作,可以理解为,第二控制模块可以控制车灯中可以机械运动的部件执行第二动作。
需要说明的是,在第二目标设备包括车标时,车标是可以机械运动的,因此,第二控制模块可以控制车标执行第二动作。
S809:第一控制模块通过雷达获取来自第二终端的第二状态提示。
本申请实施中,第一控制模块通过雷达获取第二状态提示的实现方式,与第二控制模块获取第一状态提示的实现方式类似,在此不再赘述。可以理解,第一控制模块获取第二状态提示的实现方式,也可以根据实际应用场景采用其他的方式,本申请实施例不作限定。
需要说明的是,在S801-S806所描述的内容之后,可以执行S807-S809所描述的内容;或者,在S801-S806所描述的内容之前,可以执行S807-S809所描述的内容,本申请实施例对此不作具体限定。
例如,初始时刻,第一车辆行驶在第二车辆前面,下一时刻,第二车辆超车行驶在第一车辆前面,可以按照S801-S809的顺序执行本申请实施例所描述的内容;或者,初始时刻,第一车辆行驶在第二车辆后面,下一时刻,第一车辆超车行驶在第二车辆前面,可以按照S807-S809、S801-S806的顺序执行本申请实施例所描述的内容。
需要说明的是,本申请实施例的S803、S806-S809是可选步骤,可以根据实际应用场景设置可选步骤的一个或多个,本申请实施例各步骤之间的先后顺序也可以根据实际应用场景进行调整,本申请实施例对此不作具体限定。
综上所述,在本申请实施例中,第一控制模块确定第一状态提示,第一控制模块根据第一状态提示,控制第一终端中的至少一个第一目标设备执行第一动作,以及,第一控制模块控制第一终端中的至少一个第一处理装置执行第一处理,第二控制模块获取第一动作的信息,并根据第一动作的信息,获取来自第一目标设备所在的第一终端的第一状态提示,第二控制模块获取第一状态提示是基于第一目标设备的第一动作指示的,可以减少环境能见度等的影响,从而第二车辆可以在任意环境中识别第一车辆的行驶意图和/或交通信息,第二控制模块基于行驶意图和/或交通信息,控制第二车辆适应调整驾驶策略,从而提高车辆驾驶的安全性和舒适性。
在图6对应的实施例的基础上,示例性的,图9为本申请实施例提供的一种控制方法的流程示意图,本申请实施例是以第一目标设备为雨刷为例进行示例性说明,可以包括以下步骤:
S901:第一控制模块确定第一状态提示。
S902:第一控制模块控制第一终端中的至少一个雨刷执行第一动作。
本申请实施例中,雨刷用于执行第一动作,第一控制模块可以通过雨刷传递所要表达的第一状态提示,雨刷可以为前挡风玻璃上的雨刷(前档雨刷),也可以为后挡风玻璃上的雨刷(后档雨刷),本申请实施例不作具体限定。
本申请实施中,雨刷执行的第一动作与雨刷的运动角度、运动速度、运动方向、振动频率中的至少一个相关,在雨刷执行第一动作的运动角度、运动速度、运动方向、振动频率中的至少一个不同时,雨刷执行第一动作所传递的第一状态提示也不同。
例如,雨刷执行第一动作时的角度为第一角度时,雨刷向外传递的第一状态提示为左转向;雨刷执行第一动作时的角度为第二角度时,雨刷向外传递的第一状态提示为右转向,第一角度与第二角度不同。可以理解,第一角度的具体值与第二角度的具体值,可以根据实际应用场景设定,本申请实施例不作具体限定。
本申请实施例中,在第一控制模块为MDC时,MDC控制第一终端中的至少一个雨刷执行第一动作,包括:MDC通过雨量传感器判断当前雨量,在当前雨量大于或等于第五阈值时,MDC控制第一终端中的至少一个雨刷执行第一动作。可以理解,雨量传感器的安装位置以及第五阈值的具体值可以根据实际应用场景设定,本申请实施例对此不作具体限定。
一种实现中,在当前雨量大于或等于第五阈值时,MDC控制一个雨刷执行第一动作的一种实现为:在MDC确定的第一状态提示为道路交通拥堵时,MDC可以通过雨量传感器得到当前雨量,并判断当前雨量大于或等于第五阈值,从而MDC控制前档雨刷或者后档雨刷执行第一动作,第二控制模块根据前档雨刷或者后档雨刷执行的第一动作的信息,可以得到前档雨刷或者后档雨刷所要表达的第一状态提示。
又一种实现中,在当前雨量大于或等于第五阈值时,MDC控制多个雨刷执行第一动作的一种实现为:在MDC确定道路交通拥堵时,MDC可以通过雨量传感器得到当前雨量,并判断当前雨量大于或等于第五阈值,MDC可以控制前档雨刷以及后档雨刷执行第一动作,前档雨刷和后档雨刷执行的第一动作相同,第二控制模块没有获取到前挡雨刷执行的第一动作的信息时,可以从后档雨刷执行的第一动作来获取第一动作的信息,从而第二控制模块可以得到雨刷所要表达的第一状态提示。
示例性的,图10为本申请实施例提供的一种雨刷动作的示意图,如图10所示,第一时刻,雨刷以角速度ω1从第一位置转向第二位置;第二时刻,雨刷以角速度ω2从第二位置转向第三位置;第三时刻,雨刷以角速度ω1从第三位置转向第二位置;第四时刻,雨刷以角速度ω2从第二位置转向第一位置。
其中,第一位置为水平位置,第三位置为水平位置,第三位置和第一位置不同,第一位置与第二位置之间的角度为第三角度,第二位置与第三位置之间的角度为第四角度,第三角度与第四角度的和为平角。可以理解的是,第三角度的具体值、第四角度的具体值、ω1的具体值以及ω2的具体值,可以根据实际应用场景设定,本申请实施例对此不作具体限定。
示例性的,图11为本申请实施例提供的一种雨刷动作的示意图,如图11所示,第一时刻,雨刷以角速度ω3从第四位置转向第五位置;第二时刻,雨刷以角速度ω4从第五位置转向第四位置;第三时刻,雨刷以角速度ω3从第四位置转向第五位置;第四时刻,雨刷以角速度ω4从第五位置转向第四位置。
其中,第四位置为水平位置,第五位置为水平位置,第四位置和第五位置不同,第四位置与第五位置之间的角度为平角。可以理解的是,ω3的具体值和ω4的具体值,可以根据实际应用场景设定,本申请实施例对此不作具体限定。
本申请实施例中,在第一控制模块为不集成在MDC且可以控制MDC的模块时,第一控制模块控制第一终端中的至少一个雨刷执行第一动作,包括:第一控制模块通过控制MDC,使得MDC可以通过雨量传感器判断当前雨量,在当前雨量大于或等于第六阈值时,从而MDC控制第一终端中的至少一个雨刷执行第一动作。
其中,MDC控制第一终端中的至少一个雨刷执行第一动作的实现方式可以参照前述步骤的描述,在此不再赘述。可以理解,雨量传感器的安装位置以及第六阈值的具体值可以根据实际应用场景设定,本申请实施例对此不作具体限定。
本申请实施例中,在第一控制模块为集成在MDC中的模块时,第一控制模块可以通过雨量传感器判断当前雨量,在当前雨量大于或等于第七阈值时,从而第一控制模块控制第一终端中的至少一个雨刷执行第一动作。
其中,第一控制模块控制第一终端中的至少一个雨刷执行第一动作的实现方式,与MDC控制第一终端中的至少一个雨刷执行第一动作的实现方式类似,在此不再赘述。可以理解,雨量传感器的安装位置以及第七阈值的具体值可以根据实际应用场景设定,本申请实施例对此不作具体限定。
本申请实施例中,在第一控制模块控制雨刷执行如图10所示的雨刷动作时,雨刷所要表达的第一状态提示可以为左转向,在第一控制模块控制雨刷执行如图11所示的雨刷动作时,雨刷所要表达的第一状态提示可以为靠边停车。可以理解,图10或图11所示的雨刷动作所要表达第一状态提示的具体内容,可以根据实际应用场景设定,本申请实施例不作限定。
需要说明的是,雨刷可以采用与图10或图11相同的动作或者不同的动作来传递第一状态提示,相同的动作或者不同的动作所要表达的第一状态提示的具体内容,可以根据实际应用场景设定,本申请实施例不作限定。
需要说明的是,图10或图11所示的雨刷执行的第一动作与雨刷正常刮雨的动作不同;可能的情况中,在雨刷执行第一动作时,雨刷也可以在刮雨。
S903:第二控制模块获取至少一个雨刷的第一动作的信息。
S904:第二控制模块根据第一动作的信息,获取来自雨刷所在的第一终端的第一状态提示。
本申请实施例中,S901、S903以及S904可以S601、S603以及S604的内容适应描述,在此不再赘述。
综上所述,本申请实施例中,第一控制模块确定第一状态提示后,控制至少一个雨刷执行第一动作,第二控制模块获取第一动作的信息,并根据第一动作的信息,获取来自雨刷所在的第一车辆的第一状态提示,第二车辆所获取的第一状态提示是基于雨刷的第一动作指示的,可以减少环境能见度等的影响,从而第二车辆可以在任意环境中识别第一车辆的行驶意图和/或交通信息,第二控制模块基于行驶意图和/或交通信息,控制第二车辆适应调整驾驶策略,从而提高车辆驾驶的安全性和舒适性。
在图6-图9对应的实施例的基础上,示例性的,图12为本申请实施例提供的一种控制方法的流程示意图,本申请实施例是以第一目标设备为雨刷为例进行示例性说明,如图12所示,可以包括以下步骤:
S1201:第一控制模块确定第一状态提示。
S1202:第一控制模块控制第一终端中的至少一个雨刷执行第一动作。
S1203:第一控制模块控制第一终端中的至少一个第一处理装置执行第一处理。
S1204:第二控制模块获取至少一个雨刷的第一动作的信息。
S1205:第二控制模块根据第一动作的信息,获取来自雨刷所在的第一终端的第一状态提示。
S1206:第二控制模块响应于第一终端的第一状态提示,控制第二终端执行操作。
S1207:第二控制模块确定第二状态提示。
S1208:第二控制模块控制第二终端中的至少一个第二目标设备执行第二动作。
S1209:第一控制模块通过雷达获取来自第二终端的第二动作的信息。
本申请实施例中,S1201、S1204、S1205可以参考S601、S603、S604的内容适应描述,S1202可以参考S802的内容适应描述,S1203、S1206-S1209可以参照图8对应的实施例的S803、S806-S809内容适应描述,在此不再赘述。
需要说明的是,在S1201-S1206所描述的内容之后,可以执行S1207-S1209所描述的内容;或者,在S1201-S1206所描述的内容之前,可以执行S1207-S1209所描述的内容,本申请实施例对此不作具体限定。
需要说明的是,本申请实施例的S1203、S1206-S1209是可选步骤,可以根据实际应用场景设置可选步骤的一个或多个,本申请实施例各步骤之间的先后顺序也可以根据实际应用场景进行调整,本申请实施例对此不作具体限定。
综上所述,在本申请实施例中,第一控制模块确定第一状态提示,第一控制模块根据第一状态提示,控制雨刷执行第一动作,以及,第一控制模块控制至少一个第一处理装置执行第一处理;第二控制模块获取第一动作的信息,并根据第一动作的信息,获取来自雨刷所在的第一终端的第一状态提示,第二控制模块获取第一状态提示是基于第一雨刷的第一动作指示的,可以减少环境能见度等的影响,从而第二车辆可以在任意环境中识别第一车辆的行驶意图和/或交通信息,第二控制模块基于行驶意图和/或交通信息,控制第二车辆适应调整驾驶策略,从而提高车辆驾驶的安全性和舒适性。
上面结合图6-图12,对本申请实施例的方法进行了说明,下面对本申请实施例提供的执行上述方法的装置进行描述。
示例性的,图13为本申请实施例提供的一种终端的结构示意图,如图13所示,终端130包括控制装置140,进一步地,终端还包括雷达。其中,控制装置与雷达可以通过有线方式或者无线方式连接。可以理解,终端所包括的其他部件或其他装置可以根据实际应用场景设定,本申请实施例不作限定。
本申请实施例中,上述终端可以通过控制装置140执行上述实施例所描述的方法,或者,上述终端可以在雷达的辅助下,通过控制装置140执行上述实施例所描述的方法。可以理解,终端对控制装置140或雷达进行控制的实现方式,可以根据实际应用场景设定,本申请实施例不作具体限定。
在图13所示的终端的基础上,为了更好地描述控制装置140,示例性的,图14为本申请实施例提供的一种控制装置140的结构示意图,如图14所示,控制装置140可以用于通信设备、电路、硬件组件或者芯片中,该控制装置包括:处理单元141,处理单元141用于支持控制装置执行信息处理的步骤。
在一种可能的实施例中,控制装置还可以包括:存储单元142。处理单元141、存储单元142通过通信线路相连。
存储单元142可以包括一个或者多个存储器,存储器可以是一个或者多个设备、电路中用于存储程序或者数据的器件。
存储单元142可以独立存在,通过通信线路与控制装置具有的处理单元141相连。存储单元142也可以和处理单元141集成在一起。
本申请实施例提供了一种控制装置,该控制装置包括一个或者多个模块,用于实现上述图6-图12中所包含的步骤中的方法,该一个或者多个模块可以与上述图6-图12中所包含的步骤中的方法的步骤相对应。例如,对于执行对该控制装置的动作进行控制或处理的模块可以称为处理模块。
示例性的,图15为本申请实施例提供的一种控制设备的硬件结构示意图,如图15所示,该控制设备包括处理器151,通信线路154以及至少一个通信接口(图15中示例性的以通信接口153为例进行说明)。
处理器151可以是一个通用中央处理器(central processing unit,CPU),微处理器,特定应用集成电路(application-specific integrated circuit,ASIC),或一个或多个用于控制本申请方案程序执行的集成电路。
通信线路154可包括在上述组件之间传送信息的电路。
通信接口153,使用任何收发器一类的装置,用于与其他设备或通信网络通信,如以太网,无线局域网(wireless local area networks,WLAN)等。
可能的,该控制设备还可以包括存储器152。
存储器152可以是只读存储器(read-only memory,ROM)或可存储静态信息和指令的其他类型的静态存储设备,随机存取存储器(random access memory,RAM)或者可存储信息和指令的其他类型的动态存储设备,也可以是电可擦可编程只读存储器(electricallyerasable programmable read-only memory,EEPROM)、只读光盘(compact disc read-only memory,CD-ROM)或其他光盘存储、光碟存储(包括压缩光碟、激光碟、光碟、数字通用光碟、蓝光光碟等)、磁盘存储介质或者其他磁存储设备、或者能够用于携带或存储具有指令或数据结构形式的期望的程序代码并能够由计算机存取的任何其他介质,但不限于此。存储器可以是独立存在,通过通信线路154与处理器相连接。存储器也可以和处理器集成在一起。
其中,存储器152用于存储执行本申请方案的计算机执行指令,并由处理器151来控制执行。处理器151用于执行存储器152中存储的计算机执行指令,从而实现本申请实施例所提供的控制方法。
可能的,本申请实施例中的计算机执行指令也可以称之为应用程序代码,本申请实施例对此不作具体限定。
在具体实现中,作为一种实施例,处理器151可以包括一个或多个CPU,例如图15中的CPU0和CPU1。
在具体实现中,作为一种实施例,控制设备可以包括多个处理器,例如图15中的处理器151和处理器155。这些处理器中的每一个可以是一个单核(single-CPU)处理器,也可以是一个多核(multi-CPU)处理器。这里的处理器可以指一个或多个设备、电路、和/或用于处理数据(例如计算机程序指令)的处理核。
示例性的,图16为本申请实施例提供的一种芯片的结构示意图。芯片160包括一个或两个以上(包括两个)处理器1610和通信接口1630。
在一些实施方式中,存储器1640存储了如下的元素:可执行模块或者数据结构,或者他们的子集,或者他们的扩展集。
本申请实施例中,存储器1640可以包括只读存储器和随机存取存储器,并向处理器1610提供指令和数据。存储器1640的一部分还可以包括非易失性随机存取存储器(non-volatile random access memory,NVRAM)。
本申请实施例中,存储器1640、通信接口1630以及存储器1640通过总线系统1620耦合在一起。其中,总线系统1620除包括数据总线之外,还可以包括电源总线、控制总线和状态信号总线等。为了便于描述,在图16中将各种总线都标为总线系统1620。
上述本申请实施例描述的方法可以应用于处理器1610中,或者由处理器1610实现。处理器1610可能是一种集成电路芯片,具有信号的处理能力。在实现过程中,上述方法的各步骤可以通过处理器1610中的硬件的集成逻辑电路或者软件形式的指令完成。上述的处理器1610可以是通用处理器(例如,微处理器或常规处理器)、数字信号处理器(digitalsignal processing,DSP)、专用集成电路(application specific integrated circuit,ASIC)、现成可编程门阵列(field-programmable gate array,FPGA)或者其他可编程逻辑器件、分立门、晶体管逻辑器件或分立硬件组件,处理器1610可以实现或者执行本发明实施例中的公开的各方法、步骤及逻辑框图。
结合本申请实施例所公开的方法的步骤可以直接体现为硬件译码处理器执行完成,或者用译码处理器中的硬件及软件模块组合执行完成。其中,软件模块可以位于随机存储器、只读存储器、可编程只读存储器或带电可擦写可编程存储器(electricallyerasable programmable read only memory,EEPROM)等本领域成熟的存储介质中。该存储介质位于存储器1640,处理器1610读取存储器1640中的信息,结合其硬件完成上述方法的步骤。
在上述实施例中,存储器存储的供处理器执行的指令可以以计算机程序产品的形式实现。其中,计算机程序产品可以是事先写入在存储器中,也可以是以软件形式下载并安装在存储器中。
计算机程序产品包括一个或多个计算机指令。在计算机上加载和执行计算机程序指令时,全部或部分地产生按照本申请实施例的流程或功能。计算机可以是通用计算机、专用计算机、计算机网络或者其他可编程装置。计算机指令可以存储在计算机可读存储介质中,或者从一个计算机可读存储介质向另一计算机可读存储介质传输,例如,计算机指令可以从一个网站站点、计算机、服务器或数据中心通过有线(例如同轴电缆、光纤、数字用户线(digital subscriber line,DSL)或无线(例如红外、无线、微波等)方式向另一个网站站点、计算机、服务器或数据中心进行传输。计算机可读存储介质可以是计算机能够存储的任何可用介质或者是包括一个或多个可用介质集成的服务器、数据中心等数据存储设备。例如,可用介质可以包括磁性介质(例如,软盘、硬盘或磁带)、光介质(例如,数字通用光盘(digital versatile disc,DVD))、或者半导体介质(例如,固态硬盘(solid state disk,SSD))等。
本申请实施例还提供了一种计算机可读存储介质。上述实施例中描述的方法可以全部或部分地通过软件、硬件、固件或者其任意组合来实现。计算机可读介质可以包括计算机存储介质和通信介质,还可以包括任何可以将计算机程序从一个地方传送到另一个地方的介质。存储介质可以是可由计算机访问的任何目标介质。
作为一种可能的设计,计算机可读介质可以包括紧凑型光盘只读储存器(compactdisc read-only memory,CD-ROM)、RAM、ROM、EEPROM或其它光盘存储器;计算机可读介质可以包括磁盘存储器或其它磁盘存储设备。而且,任何连接线也可以被适当地称为计算机可读介质。例如,如果使用同轴电缆,光纤电缆,双绞线,DSL或无线技术(如红外,无线电和微波)从网站,服务器或其它远程源传输软件,则同轴电缆,光纤电缆,双绞线,DSL或诸如红外,无线电和微波之类的无线技术包括在介质的定义中。如本文所使用的磁盘和光盘包括光盘(CD),激光盘,光盘,数字通用光盘(digital versatile disc,DVD),软盘和蓝光盘,其中磁盘通常以磁性方式再现数据,而光盘利用激光光学地再现数据。
上述的组合也应包括在计算机可读介质的范围内。以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
- 用户装置、用户装置的通信控制方法、核心网装置、核心网的通信控制方法、SMF、SMF的通信控制方法、UPF以及UPF的通信控制方法
- 内容或应用程序提供系统、内容或应用程序提供系统的控制方法、终端装置、终端装置的控制方法、认证装置、认证装置的控制方法