一种三阶PT对称微机械微扰敏感系统
文献发布时间:2023-06-19 11:16:08
技术领域
本发明涉及一种系统,具体涉及一种三阶PT对称微机械微扰敏感系统,属于微电子技术领域。
背景技术
在1998年,美国华盛顿大学的C. M. Bender教授提出了一种PT对称的哈密顿量,该哈密顿量不具有厄米性,但也同样有实解 。这里的P和T分别代表了宇称(Parity)变换和时间(Time)变换。在Bender教授提出PT对称概念后,国际上众多学者和研究机构很快加入到了这种非厄米的PT对称的研究之中。到目前为止,PT对称非厄米量子体系的理论框架已基本形成。除了在量子体系中的研究,PT对称理论也在不同类型的经典物理系统中得到了验证,同时PT对称系统的一些特殊的性质和现象也被逐步发现。
研究最早、报道最多的PT对称系统是光学系统,然后逐步扩散到电学、声学等多种系统。利用PT对称理论构造的经典物理系统获得了一些特殊性质和有趣现象,例如,单向隐身、完美吸收、磁光非互易性等;特殊性能包括:超灵敏传感、单模激光等。但目前对于PT对称系统的研究主要还是集中在光学系统和电学系统。
研究结果表明,PT对称的三阶光学/电学系统比其二阶系统具有更高的微扰灵敏度。但目前对于三阶PT系统的研究还仅见于光学和电学系统,三阶PT对称的机械微扰敏感系统还未见报道。
发明内容
本发明正是针对现有技术中存在的问题,提供一种三阶PT对称微机械微扰敏感系统,该技术方案有利于进一步完善PT对称理论体系;三阶PT对称结构能使微机电系统获得更高灵敏度的微扰响应性能。
为了实现上述目的,本发明的技术方案如下,一种三阶PT对称微机械微扰敏感系统,其特征在于,所述敏感系统包括包括衬底、第一微机械结构、第二微机械结构、第三微机械结构、第一可调耦合结构、第二可调耦合结构、第一可调阻尼电路和第二可调阻尼电路;其中第一微机械结构、第二微机械结构、第三微机械结构、第一可调耦合结构以及第二可调耦合结构设置在衬底上;第三微机械结构设置在第一微机械结构和第二微机械结构之间,其中第三微机械结构和第一微机械结构通过第一可调耦合结构连接,第三微机械结构和第二微机械结构通过第二可调耦合结构连接;第一可调阻尼电路通过引线连接第一微机械结构;第二可调阻尼电路通过引线连接第二微机械结构。
作为本发明的一种改进,所述第一微机电结构包括第一谐振梁、第一谐振梁上电极和锚区、第一谐振梁下电极和锚区、第一反馈梁、第一反馈上梁、第一反馈上梁电极和锚区、第一反馈下梁、第一反馈下梁电极和锚区、第一平衡梁一、第一平衡梁二、第一左连接梁和第一右连接梁;第一谐振梁的上、下部分分别连接到第一谐振梁上电极和锚区、第一谐振梁下电极和锚区;第一谐振梁的左边通过左连接梁连接第一反馈梁和第一平衡梁一;第一谐振梁的右边通过第一右连接梁连接第一平衡梁二;第一反馈梁和第一反馈上梁相互靠近形成反馈上电容;第一反馈梁和第一反馈下梁相互靠近形成反馈下电容。根据静电力公式,相互靠近形成反馈电容,可以产生反馈力。电容电极越靠近,反馈电容越大,反馈静电力越大。
作为本发明的一种改进,所述第二微机电结构包括第二谐振梁、第二谐振梁上电极和锚区、第二谐振梁下电极和锚区、第二反馈梁、第二反馈上梁、第二反馈上梁电极和锚区、第二反馈下梁、第二反馈下梁电极和锚区、第二平衡梁一、第二平衡梁二、第二左连接梁和第二右连接梁;第二谐振梁的上、下部分分别连接到第二谐振梁上电极和锚区、第二谐振梁下电极和锚区;第二谐振梁的左边通过第二左连接梁连接第二反馈梁和第二平衡梁;第二谐振梁的右边通过第二右连接梁连接第二平衡梁一;第二反馈梁和第二反馈上梁相互靠近形成反馈上电容;第二反馈梁和第二反馈下梁相互靠近形成反馈下电容。根据静电力公式,相互靠近形成反馈电容,可以产生反馈力。电容电极越靠近,反馈电容越大,反馈静电力越大。
作为本发明的一种改进,所述第三微机电结构包括第三谐振梁、第三谐振梁上电极和锚区、第三谐振梁下电极和锚区、第三平衡梁一、第三平衡梁二。第三谐振梁的上、下部分分别连接到第三谐振梁上电极和锚区、第三谐振梁下电极和锚区;第三谐振梁的左边连接到第三平衡梁一,第三谐振梁的右边连接到第三平衡梁二。
作为本发明的一种改进,所述可第一调耦合结构包括,第一上机械耦合梁,第一上叉指梁和第一上叉指梁电极和锚区,第一下机械耦合梁,第一下叉指梁和第一下叉指梁电极和锚区;第一上机械耦合梁一端连接第一谐振梁上部,一端连接第三谐振梁上部;第一下机械耦合梁一端连接第一谐振梁下部,一端连接第三谐振梁下部。
所述第二可调耦合结构包括,第二上机械耦合梁,第二上叉指梁和第二上叉指梁电极和锚区,下机械耦合梁,第二下叉指梁和第二下叉指梁电极和锚区;第二上机械耦合梁一端连接第二谐振梁上部,一端连接第三谐振梁上部;第二下机械耦合梁一端连接第二谐振梁下部,一端连接第三谐振梁下部。
作为本发明的一种改进,所述第一可调阻尼电路和第二可调阻尼电路结构相同,包括输出端口、输出端口,跨阻放大器,带通滤波器,增益控制器,相位控制器;输入端口连接到跨阻放大器的输入,跨阻放大器的输出连接到带通滤波器的输入,带通滤波器的输出连接到增益控制器,增益控制器的输出连接到相位控制器的输入,相位控制器的输出连接到输出端口。
作为本发明的一种改进,所述第一可调阻尼电路的输入和输出通过引线连接到第一微机械结构的第一反馈上梁电极和锚区、第一反馈下梁电极和锚区;所述第二可调阻尼电路的输入和输出通过引线连接到第二微机械结构的第二反馈上梁电极和锚区、第二反馈下梁电极和锚区。第一微机械结构和第二机械结构分别连接可调阻尼电路。通过各自可调阻尼电路的调节,使第一微机械结构和第二微机械结构的等效阻尼大小相等,符号相反,便于更好的形成三阶PT对称结构。
作为本发明的一种改进,所述第一微机械结构和第三微机械结构按M-M’线镜像对称且质量相等;所述第二微机械结构和第三微机械结构按N-N’线镜像对称且质量相等;所述第一可调耦合结构的上、下部分按S-S’线镜像对称且质量相等;所述第二可调耦合结构的上、下部分按S-S’线镜像对称且质量相等,便于更好的形成三阶PT对称结构。
作为本发明的一种改进,所述第一可调阻尼电路作用于第一微机械结构的等效阻尼和第二可调阻尼电路作用于第二微机械结构的等效阻尼符号相反、大小相等。
作为本发明的一种改进,所述第一上叉指梁电极和锚区、第一下叉指梁电极和锚区、第二上叉指梁电极和锚区、第二下叉指梁电极和锚区连接相同电位。
相对于现有技术,本发明具有如下优点,1)该技术方案有利于进一步完善PT对称理论体系;2)三阶PT对称结构能使微机电系统获得更高灵敏度的微扰响应性能。根据PT对称系统理论,当其偏置在奇点附近时,系统的本征频率变化量与微扰呈1/3次方的关系,且微扰量越小,系统灵敏度越高;3)该技术方案可能发现微机电系统的新现象或新效应。
附图说明
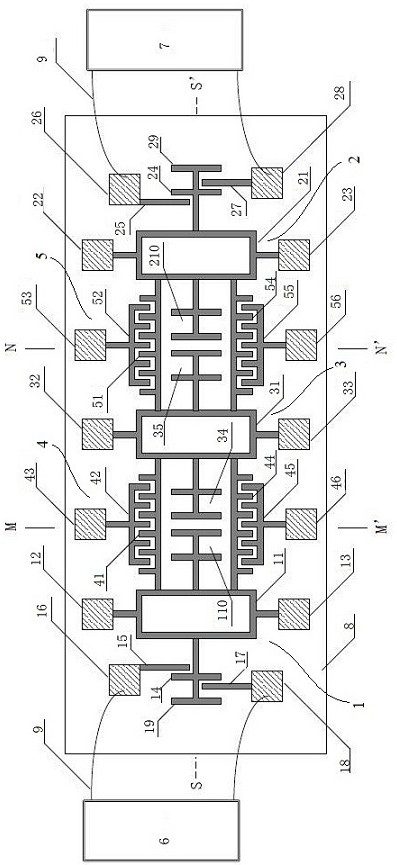
图1为本发明的主视图。
图2为本发明的剖面图。
图3为本发明的可调阻尼电路原理图。
图中:1、第一微机械结构,2、第二微机械结构,3、第三微机械结构,4、第一可调耦合结构,5、第二可调耦合结构,6、第一可调阻尼电路,7、第二可调阻尼电路,8、衬底,
11、第一谐振梁,12、第一谐振梁上电极和锚区,13、第一谐振梁下电极和锚区,14、第一反馈梁,15、第一反馈上梁,16、第一反馈上梁电极和锚区,17、第一反馈下梁,18、第一反馈下梁电极和锚区,19、第一平衡梁一,110、第一平衡梁二,111、第一左连接梁,112、第一右连接梁,21、第二谐振梁,22、第二谐振梁上电极和锚区,23、第二谐振梁下电极和锚区,24、第二反馈梁,25、第二反馈上梁,26、第二反馈上梁电极和锚区,27、第二反馈下梁,28、第二反馈下梁电极和锚区,29、第二平衡梁一,210、第二平衡梁二,211、第二左连接梁,212、第二右连接梁,41、第一上机械耦合梁,42、第一上叉指梁,43、第一上叉指梁电极和锚区,44、第一下机械耦合梁,45、第一下叉指梁,46、第一下叉指梁电极和锚区,51、第二上机械耦合梁,52、第二上叉指梁,53、第二上叉指梁电极和锚区,54、下机械耦合梁,55、第二下叉指梁,56、第二下叉指梁电极和锚区,61、输出端口,62、输出端口,63、跨阻放大器,64、带通滤波器,65、增益控制器,66、相位控制器。
具体实施方式:
为了加深对本发明的理解,下面结合附图对本实施例做详细的说明。
实施例1:参见图1,一种三阶PT对称微机械微扰敏感系统,所述敏感系统包括包括衬底8、第一微机械结构1、第二微机械结构2、第三微机械结构3、第一可调耦合结构4、第二可调耦合结构5、第一可调阻尼电路6和第二可调阻尼电路7;其中第一微机械结构1、第二微机械结构2、第三微机械结构3、第一可调耦合结构4以及第二可调耦合结构5设置在衬底8上;第三微机械结构3设置在第一微机械结构1和第二微机械结构2之间,其中第三微机械结构3和第一微机械结构1通过第一可调耦合结构4连接,第三微机械结构3和第二微机械结构2通过第二可调耦合结构5连接;第一可调阻尼电路6通过引线9连接第一微机械结构1;第二可调阻尼电路7通过引线9连接第二微机械结构2。该方案中,所述第一微机电结构1包括第一谐振梁11、第一谐振梁上电极和锚区12、第一谐振梁下电极和锚区13、第一反馈梁14、第一反馈上梁15、第一反馈上梁电极和锚区16、第一反馈下梁17、第一反馈下梁电极和锚区18、第一平衡梁一19、第一平衡梁二110、第一左连接梁111和第一右连接梁112;第一谐振梁11的上、下部分分别连接到第一谐振梁上电极和锚区12、第一谐振梁下电极和锚区13;第一谐振梁11的左边通过左连接梁111连接第一反馈梁14和第一平衡梁一19;第一谐振梁11的右边通过第一右连接梁112连接第一平衡梁二110;第一反馈梁14和第一反馈上梁15相互靠近形成反馈上电容;第一反馈梁14和第一反馈下梁17相互靠近形成反馈下电容。
该方案中,所述第二微机电结构2包括第二谐振梁21、第二谐振梁上电极和锚区22、第二谐振梁下电极和锚区23、第二反馈梁24、第二反馈上梁25、第二反馈上梁电极和锚区26、第二反馈下梁27、第二反馈下梁电极和锚区28、第二平衡梁一29、第二平衡梁二210、第二左连接梁211和第二右连接梁212;第二谐振梁21的上、下部分分别连接到第二谐振梁上电极和锚区22、第二谐振梁下电极和锚区23;第二谐振梁21的左边通过第二左连接梁211连接第二反馈梁24和第二平衡梁29;第二谐振梁21的右边通过第二右连接梁212连接第二平衡梁一210;第二反馈梁24和第二反馈上梁25相互靠近形成反馈上电容;第二反馈梁24和第二反馈下梁27相互靠近形成反馈下电容。
其中,所述第三微机电结构3包括第三谐振梁31、第三谐振梁上电极和锚区32、第三谐振梁下电极和锚区33、第三平衡梁一34、第三平衡梁二35。第三谐振梁31的上、下部分分别连接到第三谐振梁上电极和锚区32、第三谐振梁下电极和锚区33;第三谐振梁31的左边连接到第三平衡梁一34,第三谐振梁31的右边连接到第三平衡梁二35。
所述可第一调耦合结构4包括,第一上机械耦合梁41,第一上叉指梁42和第一上叉指梁电极和锚区43,第一下机械耦合梁44,第一下叉指梁45和第一下叉指梁电极和锚区46;第一上机械耦合梁41一端连接第一谐振梁11上部,一端连接第三谐振梁31上部;第一下机械耦合梁44一端连接第一谐振梁11下部,一端连接第三谐振梁31下部。
所述第二可调耦合结构5包括,第二上机械耦合梁51,第二上叉指梁52和第二上叉指梁电极和锚区53,下机械耦合梁54,第二下叉指梁55和第二下叉指梁电极和锚区56;第二上机械耦合梁51一端连接第二谐振梁21上部,一端连接第三谐振梁31上部;第二下机械耦合梁54一端连接第二谐振梁21下部,一端连接第三谐振梁31下部。
所述第一可调阻尼电路6和第二可调阻尼电路7结构相同,包括输出端口61、输出端口62,跨阻放大器63,带通滤波器64,增益控制器65,相位控制器66;输入端口62连接到跨阻放大器63的输入,跨阻放大器63的输出连接到带通滤波器64的输入,带通滤波器64的输出连接到增益控制器65,增益控制器65的输出连接到相位控制器66的输入,相位控制器66的输出连接到输出端口61。
所述第一可调阻尼电路6的输入62和输出61通过引线9连接到第一微机械结构1的第一反馈上梁电极和锚区16、第一反馈下梁电极和锚区18;所述第二可调阻尼电路7的输入62和输出61通过引线9连接到第二微机械结构2的第二反馈上梁电极和锚区26、第二反馈下梁电极和锚区28。
所述第一微机械结构1和第三微机械结构3按M-M’线镜像对称且质量相等;所述第二微机械结构2和第三微机械结构3按N-N’线镜像对称且质量相等;所述第一可调耦合结构4的上、下部分按S-S’线镜像对称且质量相等;所述第二可调耦合结构5的上、下部分按S-S’线镜像对称且质量相等,所述第一可调阻尼电路6作用于第一微机械结构1的等效阻尼和第二可调阻尼电路7作用于第二微机械结构2的等效阻尼符号相反、大小相等,所述第一上叉指梁电极和锚区43、第一下叉指梁电极和锚区46、第二上叉指梁电极和锚区53、第二下叉指梁电极和锚区56连接相同电位。
本发明的三阶PT对称微机械微扰敏感系统的工作原理为:
PT对称原理:第一微机械结构1、第二微机械结构2和第三微机械结构3呈两两镜像对称,它们具有完全相同的质量和弹性系数,同时第一可调阻尼电路6作用于第一微机械结构1的等效阻尼和第二可调阻尼电路7作用于第二微机械结构2的等效阻尼符号相反、大小相等。
可调阻尼电路原理:阻尼的正/负通过相位控制器来调整,当反馈信号与谐振器振动信号同相时,系统体现负阻尼;当反馈信号与谐振器振动信号反相时,系统体现正阻尼。阻尼的大小通过增益控制器和相位控制器共同调整。
微扰敏感原理:将本发明的三阶PT对称微机械微扰敏感系统偏置在奇点状态时,环境施加的刚度微扰、质量微扰和阻尼微扰将使系统的本征频率产生大幅偏移。
本发明的三阶PT对称微机械微扰敏感系统的工作过程为:
将三阶PT对称微机械微扰敏感系统置于真空环境,第一微机械结构1和第三微机械结构3之间以及第二微机械结构2和第三微机械结构3之间都采用电压进行偏置,通过调节第一可调耦合结构4和第二可调耦合结构5的电压可以对微机械结构之间的耦合强度进行调节。第一微机械结构1和第二微机械结构2都各自外接阻尼调节电路,通过调节使两个微机械结构的阻尼满足大小相等正负相反的要求。同时,将可调正/负阻尼电路中包含的谐振器振动信号经过缓冲器后连接到信号分析仪进行分析。
系统处于PT对称时,可以通过调节可调耦合结构的电压寻找系统的奇点。对系统奇点加载微扰信号可以采用以下3种方式:利用微扰电压对谐振器加载刚度微扰;采用颗粒吸附对谐振器加载质量微扰;调节测试环境气压对系统加载阻尼微扰。
需要说明的是上述实施例,并非用来限定本发明的保护范围,在上述技术方案的基础上所作出的等同变换或替代均落入本发明权利要求所保护的范围。
- 一种三阶PT对称微机械微扰敏感系统
- 一种三阶PT对称微机械微扰敏感系统