一种多功能液压机械臂
文献发布时间:2023-06-19 11:16:08
技术领域
本发明属于矿石破碎设备领域,具体涉及一种多功能液压机械臂。
背景技术
旋回破碎机是矿山开采过程中对矿石进行前期破碎的高效重型破碎装备,用途广泛,破碎机一般会配置一个较大的料池,破碎机位于料池的下方,物料由车辆倾倒入料池中,物料在重力作用下源源不断地进入破碎机的破碎腔中,保障破碎机持续破碎作业,破碎后的物料从破碎机下部流出。
破碎机料池中的待破物料尺寸大小不一,形状各异;有时还混合一些不适宜破碎的物料或其它杂质,这些杂质不仅影响矿物的纯洁度,还经常会造成破碎机入料困难或对损害破碎机,比如:当物料尺寸大于破碎机最大入口粒度尺寸时,该物料就不能进入破碎腔内并阻挡其它物料进入,影响破碎机的正常作业;当一些难(或不能)破碎物质进入破碎腔中会对破碎机产生损伤或故障。
为解决此类问题,现在常用的方法是使用一般的工程机械对料池异物进行清理,如挖掘机、汽车吊等来完成相关的破碎或清障作业,采用这类通用作业机械存在诸多不便:需要由专业司机操控,且因随机调用司机对作业现场和作业要求不熟悉等,作业效率不高,破碎机停机等待时间较长,影响破碎机的正常运行效率;由于料池是边长十几米、深七八米方形槽,体积较大,工程机械司机在操作室内视觉效果不好,作业效能和安全性不好,有时料池内出现一些异物,还需要人工进入料池协助吊装清理,工作人员劳动强度和安全隐患大,作业排放、噪声等对环境有不良影响。
基于上述原因,目前有些矿山采用在料池边安装一台破碎机械臂协助完成部分工作,在机械臂自由端装有破碎锤,协助完成大块物料的破碎,对提高破碎机的运行效率有较好的效果,但这种破碎机械臂的功能单一,要全面解决物料的清理清障等工作仍需要依靠外部其它机械设备作业才能完成,没有全面解决现场相关问题。
发明内容
为了解决背景技术中问题,本发明公开一种多功能液压机械臂,在机械臂的前端铰接连接有挖斗、压板和液压破碎锤,作业效率高,全面解决现场破碎及清障等相关问题。
为实现上述发明目的,本发明采用下述技术方案:
一种多功能液压机械臂,包括安装于料池边缘的机座,在机座上转动连接有转台,转台在摆动驱动的作用下能够在水平面上相对机座左右摆动,转台的上端与第一节臂的后端铰接连接,第一节臂的前端与第二节臂的后端铰接连接,第二节臂的前端与第三节臂的连接端转动连接,第三节臂在旋转驱动的作用下能够绕第二节臂的中轴线旋转,在第三节臂的自由端铰接连接有挖斗、压板和液压破碎锤,挖斗能够单独或与压板配合挖取料池内物料,液压破碎锤能够将料池内大块物料预破碎至破碎机允许的尺寸。
进一步地,在第三节臂前端的上部通过转轴A转动连接有挖斗和压板,挖斗和压板相对设置,在第三节臂和挖斗之间设置有液压缸C,液压缸C的缸体与第三节臂中部铰接连接,液压缸C的自由端通过连杆A与挖斗和第三节臂前端上部铰接连接,在液压缸C的作用下,挖斗能够绕转轴A旋转挖取料池内物料,在压板背对挖斗的一侧设置有液压缸D,液压缸D的缸体与第三节臂中部铰接连接,液压缸D的自由端与压板铰接连接,在液压缸D的作用下,压板能够绕转轴A旋转拨动料池内物料或与挖斗配合夹取料池内物料。
进一步地,在第三节臂前端的下部通过转轴B转动连接有摆动座,在摆动座的前端通过液压摆动缸转动连接有液压破碎锤,液压破碎锤在液压摆动缸驱动下能够绕液压摆动缸自身轴线摆动,在摆动座和第三节臂之间设置有液压缸E,液压缸E的缸体与第三节臂中部铰接连接,液压缸E的自由端通过连杆B与第三节臂前端下部和摆动座铰接连接,在液压缸E的作用下,摆动座能够带动液压破碎锤绕转轴B旋转。
进一步地,在机座的上端设置有转盘轴承,转台底部通过竖直设置的第一关节轴与转盘轴承转动连接,在摆动驱动的作用下,转台能够绕第一关节轴转动。
进一步地,在转台的上端转动连接有第二关节轴,转台的上端通过第二关节轴与第一节臂的后端铰接连接,在转台和第一节臂之间设置有液压缸A,液压缸A的缸体与第一节臂铰接连接,液压缸A的自由端与转台底部铰接连接,在液压缸A的作用下,第一节臂能够绕第二关节轴旋转调整第一节臂的俯仰角度。
进一步地,在第一节臂的前端转动连接有第三关节轴,第二节臂的后端通过第三关节轴与第一节臂的前端铰接连接,在第一节臂和第二节臂之间设置有液压缸B,液压缸B的缸体与第一节臂铰接连接,液压缸B的自由端与第二节臂铰接连接,在液压缸B的作用下,第二节臂能够绕第三关节轴旋转调整第二节臂的俯仰角度。
进一步地,在第二节臂的前端设置有驱动装置、转盘轴承和第四关节轴,第三节臂后端通过转盘轴承和第四关节轴与第二节臂的前端转动连接,在驱动装置的作用下,第三节臂能够绕第四关节轴旋转。
与现有技术相比,本发明的有益效果是:
本发明多功能液压机械臂,安装于料池边缘的机座,机座上转动连接有转台,转台能够相对机座左右摆动,转台的上端铰接连接有第一节臂,第一节臂前端铰接连接有第二节臂,在液压缸的作用下第一节臂和第二节臂的俯仰角度能够调节,第二节臂的前端与第三节臂的连接端转动连接,第三节臂在旋转驱动的作用下能够绕第二节臂的中轴线旋转,在第三节臂的自由端铰接连接有挖斗、压板和液压破碎锤,挖斗能够单独或与压板配合挖取料池内物料,液压破碎锤能够将料池内大块物料预破碎至破碎机允许的尺寸,避免大块物料不能进入破碎腔内阻挡其它物料进入的问题,挖斗和压板配合将一些难破碎或不能破碎物质从料池中取出,避免难破碎或不能破碎物质进入破碎腔中会对破碎机产生损伤或故障,且勿需人工进入料池协助吊装清理,作业效率高,全面解决现场破碎及清障等相关问题。
附图说明
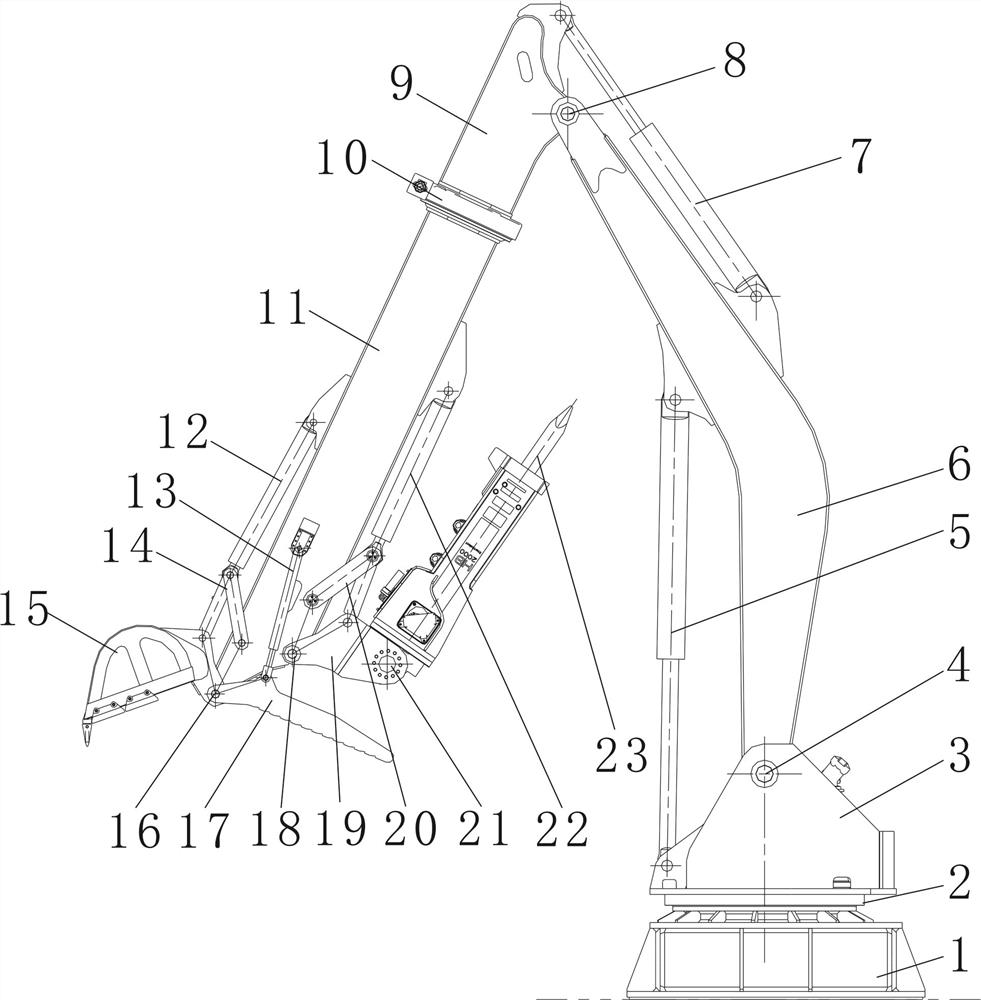
图1是本发明的结构示意图;
上图中:1-机座;2-第一关节轴;3-转台;4-第二关节轴;5-液压缸A;6-第一节臂;7-液压缸B;8-第三关节轴;9-第二节臂;10-第四关节轴;11-第三节臂;12-液压缸C;13-液压缸D;14-连杆A;15-挖斗;16-转轴A;17-压板;18-转轴B;19-摆动座;20-连杆B;21-液压摆动缸;22-液压缸E;23-液压破碎锤。
具体实施方式
为了更好地理解本发明,下面结合实施例进一步阐明本发明的内容,但本发明的内容不仅仅局限于下面的实施例。
结合附图1详细阐述本发明一种多功能液压机械臂,包括安装于料池边缘的机座1,在机座1上转动连接有转台3,转台3在摆动驱动的作用下能够在水平面上相对机座1左右摆动,转台3的上端与第一节臂6的后端铰接连接,第一节臂6的前端与第二节臂9的后端铰接连接,第二节臂9的前端与第三节臂11的连接端转动连接,第三节臂11在旋转驱动的作用下能够绕第二节臂9的中轴线旋转,在第三节臂11的自由端铰接连接有挖斗15、压板17和液压破碎锤23,挖斗15能够单独或与压板17配合挖取料池内物料,液压破碎锤23能够将料池内大块物料预破碎至破碎机允许的尺寸。
作为可选设计,优选在第三节臂11前端的上部通过转轴A16转动连接有挖斗15和压板17,挖斗15和压板17相对设置,挖斗15柄和压板17柄均通过转轴A16与第三节臂11铰接连接,在第三节臂11的上部和挖斗15之间设置有液压缸C12,液压缸C12的缸体与第三节臂11中部铰接连接,液压缸C12的自由端通过连杆A14与挖斗15和第三节臂11前端上部铰接连接,在液压缸C12的作用下,挖斗15能够绕转轴A16旋转挖取料池内物料,在压板17背对挖斗15的一侧设置有液压缸D13,液压缸D13的缸体与第三节臂11中部铰接连接,液压缸D13的自由端与压板17铰接连接,在液压缸D13的作用下,压板17能够绕转轴A16旋转拨动料池内物料或与挖斗15配合夹取料池内物料。
作为可选设计,优选在第三节臂11前端的下部通过转轴B18转动连接有摆动座19,在摆动座19的前端通过液压摆动缸21转动连接有液压破碎锤23,液压破碎锤23在液压摆动缸21驱动下能够绕液压摆动缸21自身轴线摆动,在摆动座19和第三节臂11之间设置有液压缸E22,液压缸E22的缸体与第三节臂11中部铰接连接,液压缸E22的自由端通过连杆B20与第三节臂11前端下部和摆动座19铰接连接,在液压缸E22的作用下,摆动座19能够带动液压破碎锤23绕转轴B18旋转。
作为可选设计,优选在机座1的上端设置有转盘轴承,转台3底部通过竖直设置的第一关节轴2与转盘轴承转动连接,在摆动驱动的作用下,转台3能够绕第一关节轴2转动。
作为可选设计,优选在转台3的上端转动连接有第二关节轴4,转台3的上端通过第二关节轴4与第一节臂6的后端铰接连接,在转台3和第一节臂6之间设置有液压缸A5,液压缸A5的缸体与第一节臂6铰接连接,液压缸A5的自由端与转台3底部铰接连接,在液压缸A5的作用下,第一节臂6能够绕第二关节轴4旋转调整第一节臂6的俯仰角度。
作为可选设计,优选在第一节臂6的前端转动连接有第三关节轴8,第二节臂9的后端通过第三关节轴8与第一节臂6的前端铰接连接,在第一节臂6和第二节臂9之间设置有液压缸B7,液压缸B7的缸体与第一节臂6铰接连接,液压缸B7的自由端与第二节臂9铰接连接,在液压缸B7的作用下,第二节臂9能够绕第三关节轴8旋转调整第二节臂9的俯仰角度。
作为可选设计,优选在第二节臂9的前端设置有驱动装置、转盘轴承和第四关节轴10,第三节臂11后端通过转盘轴承和第四关节轴10与第二节臂9的前端转动连接,在驱动装置的作用下,第三节臂11能够绕第四关节轴10旋转,转台3的驱动和第四关节轴10的回转驱动采用液压马达+减速机的驱动方式以及液压和电控系统等现有技术,故未进行详细说明。
本发明工作过程如下:
本发明所述多功能机械臂安装于料池边缘,作业范围覆盖整个料池面积和深度,并可深入至破碎腔内,多功能机械臂在使用期间,其末端所集成的挖斗15、压板17和液压破碎锤23根据使用需求实施的作业动作相互避让和配合,调整各机械节臂的俯仰状态及挖斗15、压板17和液压破碎锤23的状态,需要将大块物料预破碎至小于破碎机允许的最大尺寸时,先将压板17向接近挖斗15方向旋转,在调整液压破碎锤23的俯仰角度,将料池内大块物料预破碎至破碎机允许的尺寸,当需要辅助送料时,将液压破碎锤23收起利用挖斗15或/和压板17扒、挖、拔等形式将物料送入破碎腔中,当清理料池时,维护作业如更换衬板等前,通过多功能机械臂的多关节联合运动将杂物移至到合适的位置,利用挖斗15或/和压板17清除清理影响维护作业的物料,将难破碎或不能被破碎的物料清除出料池,本发明所述多功能机械臂操控模式为线控与遥控并存,以适应现场不同的作业需求,液压系统采用比例控制系统,操控线性好,故障率低。
以上说明仅为本发明的应用实施方式,但本发明的保护范围并不局限于此,不能以此来限定本发明的权利范围,任何根据本发明的技术方案所做的等效变化,都应涵盖在本发明的保护范围之内。
- 一种多功能液压机械臂
- 一种多功能液压机械臂