搬运系统
文献发布时间:2023-06-19 11:16:08
技术领域
本申请属于运输装置技术领域,具体涉及一种搬运系统。
背景技术
现有技术中,通常使用移动机器人搬运工装货架,移动机器人的基本功能为举升工装货架,然后将工装货架连同货物一起转移到目的位置,完成物流转运的任务。但移动机器人行走定位存在误差,导致移动机器人在举起工装货架时存在大约为±10mm左右的误差,进而导致目的位置的工装货架摆放存在误差,多次摆放工装货架后,累积误差增大,存在较大的安全隐患和碰撞隐患。
发明内容
因此,本申请要解决的技术问题在于提供一种搬运系统,能够减小搬运装置在举升货架时产生的误差,进而减小目的位置货架的累积误差,进而减小安全隐患和碰撞隐患。
为了解决上述问题,本申请提供了一种搬运系统,包括货架和搬运装置,所述搬运装置用于搬运所述货架,所述货架上设置有第一纠正部,所述搬运装置上设置有第二纠正部,当所述搬运装置与所述货架相接时,所述第一纠正部与所述第二纠正部相插接。
可选的,所述第一纠正部上设置有插槽,所述第二纠正部上设置有凸块,所述凸块能够插入所述插槽内。
可选的,所述插槽沿所述凸块的插入方向横截面递减。
可选的,所述插槽为十字形,所述凸块为十字形。
可选的,当所述凸块插入所述插槽时,所述凸块靠近所述插槽的槽底的一段为第一段,所述第一段沿插入所述插槽的方向的反向截面递增。
可选的,所述货架包括面板,所述第一纠正部的数量为多个,多个所述第一纠正部均匀设置在所述面板的底部,所述第二纠正部的数量与所述第一纠正部的数量相同,所述第二纠正部与所述第一纠正部一一对应设置。
可选的,所述面板设置有支撑梁,所述第一纠正部设置在所述支撑梁上。
可选的,所述货架为多个,多个所述货架沿竖直方向依次叠置。
可选的,所述货架还包括支脚,当多个所述货架沿竖直方向依次叠置时,相邻的所述货架的所述支脚一一相对设置。
可选的,所述搬运装置包括升降单元,所述第二纠正部设置在所述升降单元的顶部。
有益效果
本发明的实施例中所提供的一种搬运系统,能够减小搬运装置在举升货架时产生的误差,进而减小目的位置货架的累积误差,进而减小安全隐患和碰撞隐患。
附图说明
图1为本申请实施例的搬运系统的立体结构示意图;
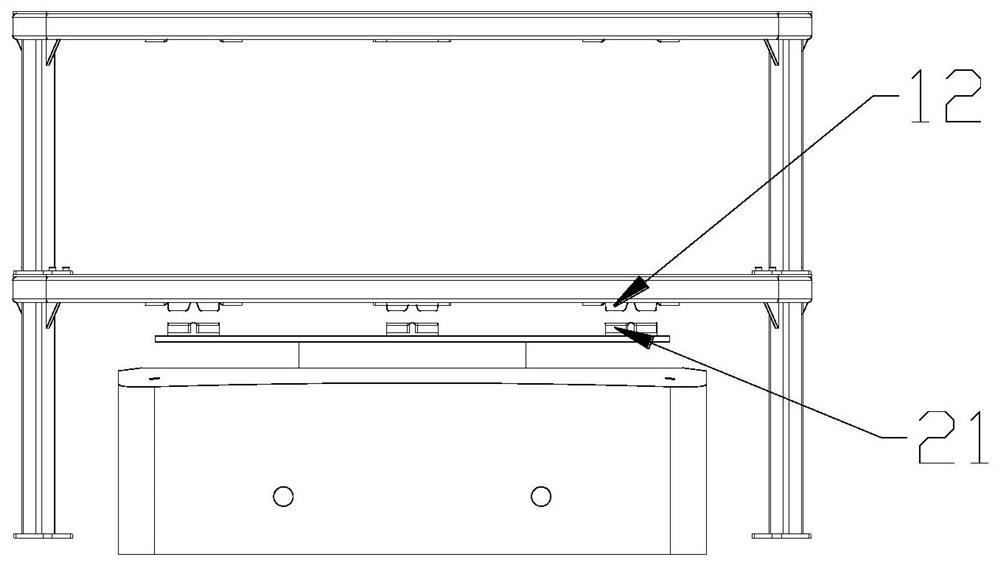
图2为本申请实施例的搬运系统的主视图;
图3为本申请实施例的货架的立体结构示意图;
图4为本申请实施例的货架的主视图;
图5为本申请实施例的第一纠正部的立体结构示意图;
图6为本申请实施例的第一纠正部主视图;
图7为本申请实施例的第二纠正部的立体结构示意图;
图8为本申请实施例的第二纠正部的主视图。
附图标记表示为:
11、面板;12、第一纠正部;121、插槽;13、支脚;2、搬运装置;21、第二纠正部;211、凸块。
具体实施方式
结合参见图1至图8所示,根据本申请的实施例,一种搬运系统,包括货架和搬运装置2,搬运装置2用于搬运货架,货架上设置有第一纠正部12,搬运装置2上设置有第二纠正部21,当搬运装置2与货架相接时,第一纠正部12与第二纠正部21相插接,通过设置第一纠正部12和第二纠正部21,能够修正搬运装置2在举升货架时产生的误差,进而减小目的位置货架的累积误差,进而减小安全隐患和碰撞隐患。
在一些实施方式中,搬运装置2为二维码导航机器人,以二维码标签中心为定位点,机器人中心具有二维码扫描摄像头。
第一纠正部12上设置有插槽121,第二纠正部21上设置有凸块211,凸块211能够插入插槽121内,通过设置插槽121和凸块211,能够使第一纠正部12与第二纠正部21稳定的相接,以修正搬运装置2在举升货架时产生的误差。
在一些实施方式中,插槽121的开口朝向,凸块211向上突出。
插槽121沿凸块211的插入方向横截面递减,在插槽121的两侧槽壁形成导向面,为凸块211的插入提供导向作用,同时也提供了较大的纠正范围。
在一些实施方式中,插槽121开口处的最大宽度比插槽121槽底处的最小宽度大20mm,以使第一纠正部12和第二纠正部21能够修正±10mm的误差。
在一些实施方式中,插槽121沿凸块211的插入方向的横截面大致为凹字形。
插槽121为十字形,凸块211为十字形,能够同时在两个垂直的方向上实现修正误差,同时也使第一纠正部12与第二纠正部21连接更为稳定。
在一些实施方式中,第一纠正部12整体轮廓大致为圆柱体,在圆柱体的一端开设插槽121即形成第一纠正部12。
在一些实施方式中,第二纠正部21包括圆盘和设置在圆盘圆面上的十字形凸起。
当凸块211插入插槽121时,凸块211靠近插槽121的槽底的一段为第一段,第一段沿插入插槽121的方向的反向截面递增,为凸块211的插入提供导向作用,同时进一步提供了较大的纠正范围。
在一些实施方式中,第一段沿插入插槽121的方向的反向截面递增,也即凸块211的头端宽度逐渐增大。
在一些实施方式中,第一段的截面为半圆形。
货架包括面板11,第一纠正部12的数量为多个,多个第一纠正部12均匀设置在面板11的底部,第二纠正部21的数量与第一纠正部12的数量相同,第二纠正部21与第一纠正部12一一对应设置,保证了搬运装置2搬运货架时的稳定性。
在一些实施方式中,第一纠正部12的数量为四个,四个第一纠正部12呈矩形的四角设置在面板11的底部。
在一些实施方式中,第二纠正部21的数量也为四个,四个第一纠正部12与四个第二纠正部21在竖直方向上一一对应设置,使每个第一纠正部12均能够插入所对应的第二纠正部21内。
面板11设置有支撑梁,第一纠正部12设置在支撑梁上,保证第一纠正部12的稳定设置,同时也保证货架的强度。
在一些实施方式中,支撑梁呈十字形设置。
在一些实施方式中,第一纠正部12通过螺栓固定在支撑梁的底部。
货架为多个,多个货架沿竖直方向依次叠置,能够增加货架的储物能力,同时增加搬运效率。
在一些实施方式中,相叠置的货架大小尺寸相同。
在一些实施方式中,位于最底层的货架上设置有第一纠正部12,其他货架上可不设置第一纠正部12,节约成本。
货架还包括支脚13,当多个货架沿竖直方向依次叠置时,相邻的货架的支脚13一一相对设置,保证了多个货架叠置时的稳定性。
在一些实施方式中,支脚13的数量为四个,面板11为矩形,四个支脚13垂直设置在面板11的底面上,且四个支脚13一一对应地设置在面板11底面的四角处。
搬运装置2包括升降单元,第二纠正部21设置在升降单元的顶部,保证搬运装置2能够稳定的搬运货架。
工作时,第一纠正部12安装在货架的支撑梁上,凸块211安装在搬运装置2的顶升旋转盘内。搬运装置2根据调度系统行走至货架底部,将货架顶起,然后将货架转运到目标位置,顶升旋转盘下降放置货物。
插槽121的斜面结构起导向作用,将货架重新纠正,并使凸块211插入到插槽121内,搬运装置2顶升会使凸块211与插槽121进行摩擦配合,从而减少由于货架偏移产生的故障。可根据需求对货架进行组合使用,四个支脚13的位置设计有四组M6的螺纹过孔,货架四个角位设计有四组M6的螺纹孔,四组M6的螺纹孔与支脚13的四组螺纹孔位置一一对应,当需要使用多层货架时将多个货架堆叠起来,然后通过四组M6螺丝对相邻的货架进行固定,可满足不同的工况要求。
本发明的实施例中所提供的一种搬运系统,能够减小搬运装置2在举升货架时产生的误差,进而减小目的位置货架的累积误差,进而减小安全隐患和碰撞隐患。
本领域的技术人员容易理解的是,在不冲突的前提下,上述各有利方式可以自由地组合、叠加。
以上仅为本申请的较佳实施例而已,并不用以限制本申请,凡在本申请的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本申请的保护范围之内。以上仅是本申请的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本申请技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本申请的保护范围。
- 被处理体的搬运系统、无人搬运车系统、无人搬运车及被处理体的搬运方法
- 搬运装置及其应用的搬运系统及搬运系统的预测保养方法