一种电机控制分类垃圾桶
文献发布时间:2023-06-19 11:16:08
技术领域
本发明涉及垃圾桶技术领域,具体涉及一种电机控制分类垃圾桶。
背景技术
垃圾桶,又名废物箱或垃圾箱,是指装放垃圾的容器,多数以金属或塑胶制,用时放入塑料袋,当垃圾一多便可扎起袋丢掉,多数垃圾桶都有盖以防垃圾的异味四散,有些垃圾桶可以以脚踏开启,以室外垃圾桶为例,一般现有的垃圾桶在都是配合垃圾车进行使用,而在进行配合使用的时候,垃圾车上的插头插进插进垃圾桶上设置的固定条之间,然后带动垃圾桶上升以及翻转,将垃圾桶内的垃圾倒入垃圾车内,且为了防止雨天进水,以及内部臭气的散发,一般都在垃圾桶的桶口处设置桶盖,以防止雨水进入臭气的散发;
例如申请号为“201910473921.2”,名称为“翻盖垃圾桶”的中国专利,其公开了“桶盖上铰接有可打开或关闭垃圾投放口的上翻盖,上桶座固定在桶体上口,桶盖可拆卸地安装在上桶座或桶体上,垃圾袋套设在上桶座上,所述的上桶座上对应设有可打开或关闭垃圾投放口并可弹性复位的左右夹板,桶盖与上桶座之间设有与上翻盖联动的夹板开闭装置;当关闭上翻盖时,上翻盖通过夹板开闭装置带动左右夹板向下偏转打开垃圾投放口并松开垃圾袋,当打开上翻盖时,左右夹板弹性复位关闭垃圾投放口并夹紧垃圾袋”,且具有“可调换垃圾袋,保证换袋操作简单方便”的效果。
现有技术的不足之处在于:在用垃圾车进行收集垃圾的时候,垃圾筒上方设置的盖子,由于没有固定,倾倒的时候,往往会在垃圾桶的桶口来回摇摆,不仅严重影响垃圾桶的倾倒速度,且在长时间的使用下,会严重损坏桶盖,降低垃圾桶的使用寿命。
发明内容
本发明的目的是提供一种电机控制分类垃圾桶,以解决现有技术中的上述不足之处。
为了实现上述目的,本发明提供如下技术方案:
包括多个桶体,每个所述桶体上均活动设置有桶盖,所述筒体的背面设置有固定壳,所述桶体一侧的竖直方向上滑动设置有伸缩长杆以及支撑长杆,所述伸缩长杆的一端铰接在桶盖上;
所述固定壳设有传动机构,所述传动机构包括主动齿轮以及分别与主动齿轮相啮合的第一传动齿条及第二传动齿条,所述主动齿轮转动安装于固定壳内,所述第一传动齿条以及第二传动齿条均竖直滑动设置在固定壳内,所述固定壳内滑动设置有传动块,所述第一传动齿条的底端固定安装于传动块上,所述第二传动齿条的顶端固定安装于伸缩长杆上,所述传动块的外壁上活动套接有第二弹簧;所述传动块上还设有用于锁止传动块的锁止组件;
所述桶体的底部设有底座,所述底座的顶部固定设置有传动座,且传动座内设有驱动单元,所述驱动单元的输出轴上转动安装有转动柱,所述转动柱能够拉开的插接于所述固定壳内,且在转动柱插接至固定壳内时,所述转动柱能够与所述传动块相抵触以使得所述传动块通过所述传动机构带动所述伸缩长杆下移;
所述固定壳内还转动连接有调节转动块,所述支撑长杆的下端固定设置有圆形滑杆,所述伸缩长杆下移的使得所述圆形滑杆的底端能够与调节转动块的侧面相接触;
所述驱动单元通过传动齿轮组驱动调节转动块旋转。
优选的,所述锁止组件包括锁止块、弯型铰接杆以及弹簧块,所述锁止块以及弯型铰接杆的数量均为两个,两个所述弯型铰接杆均转动设置在传动块内,两个所述锁止块水平滑动设置在传动座内,所述弯型铰接杆的一端活动设置在锁止块上开设的U型槽内,另一端活动设置在弹簧块上开设的U形槽内;
所述传动块内还设有第三弹簧,所述第三弹簧的一端固定设置在弹簧块上;
所述固定壳内开设有两个与锁止块像适配的锁止卡槽,且两个所述锁止块能够插接至两个相应位置的锁止卡槽内。
优选的,所述伸缩长杆的顶端滑动设置有两个连接滑杆,桶盖的内部固定设有安装块,所述支撑长杆和所述连接滑杆的一端均活动设置在安装块上开设的U形槽内。
优选的,所述传动齿轮组包括第一传动齿轮以及第二传动齿轮,所述第一传动齿轮活动设置在固定壳内,且与所述调节转动块固定连接,所述第二传动齿轮固定设置在驱动单元的输出轴上,并与所述转动柱同轴心,且当所述转动柱位于固定壳内时,第一传动齿轮与第二传动齿轮相啮合。
优选的,所述桶体的背面固定设置有固定长壳,所述伸缩长杆设置于所述固定长壳内。
优选的,所述桶体相对两侧的外壁上均设置有固定条。
优选的,所述底座的前方设有红外感应器,所述红外感应器与驱动单元电连接。
优选的,每相邻底座之间均设有两组连接机构,每个连接机构均包括调节螺母、螺纹块以及限位杆,所述调节螺母和所述螺纹块的数量均为两个,两个所述调节螺母相转动连接,两个所述螺纹块分别螺纹连接在两个调节螺母内,其中一个所述螺纹块的侧壁上固定安装有矩形套筒,另外一个所述螺纹块侧壁上固定安装有矩形杆,所述矩形杆的一端插接至所述矩形套筒内。
优选的,两个所述螺纹块的一侧均固定安装有限位杆,且所述限位杆的一端贯穿并延伸至调节螺母的外侧,且所述底座上开设有与限位杆相适配的连接槽,且所述限位杆可插接至所述连接槽内。
在上述技术方案中,本发明提供的一种电机控制分类垃圾桶具备的有益效果:本发明通过在桶体的侧壁设置固定壳,在固定壳内设置传动块,以及传动机构,然后在桶体的底部设置底座以及传动座,通过与传动之间的配合实现当需要进行倾倒垃圾,需要将桶体与底座分离时,由于转动柱能够拉开的插接于所述固定壳内,桶体以及固定壳可以整体的与底座和传动座脱离,且脱离后能够通过固定壳内部设置的结构实现桶盖处于常开状态,即便于对桶体内部垃圾的倾倒,且避免桶盖的来回翻碰撞,提高桶盖使用寿命;当正常使用需要往桶体内扔垃圾时,可通过底座上设置的红外感应器进行感应,然后将信号传递给相应红外接收器,以驱动相应电连接的驱动单元转动,然后通过传动齿轮组带动调节转动块转动,即带动支撑长杆向上运动,将桶体上的桶盖撑开,即实现在不同的时期对桶盖进行不同传动方式进行撑开,便于桶体垃圾对垃圾车内的倾倒以及向桶体内扔垃圾,使用较为方便。
应当理解,前面的一般描述和以下详细描述都仅是示例性和说明性的,而不是用于限制本公开。
本申请文件提供本公开中描述的技术的各种实现或示例的概述,并不是所公开技术的全部范围或所有特征的全面公开。
附图说明
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
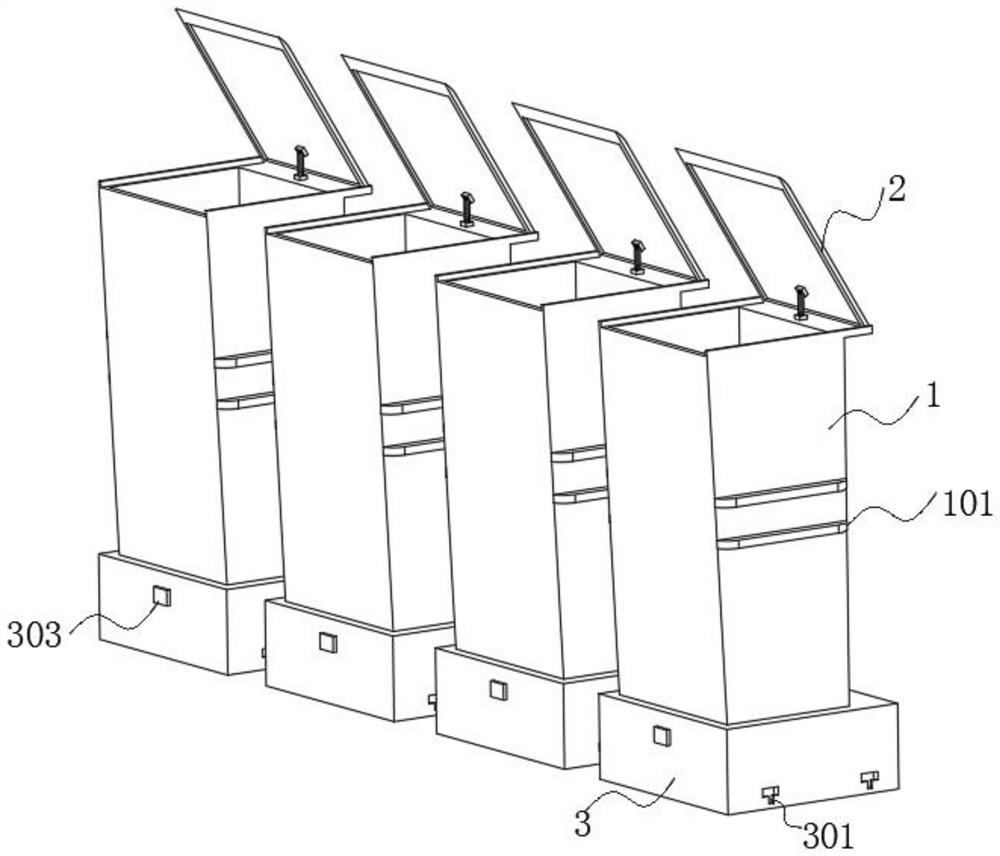
图1为本发明实施例提供的结构示意图;
图2为本发明实施例提供的另一视角的结构示意图;
图3为本发明实施例提供桶体的结构示意图;
图4为本发明实施例提供桶体以及固定壳的结构示意图;
图5为本发明实施例提供的A处放大结构示意图;
图6为本发明实施例提供的伸缩长杆、支撑长杆以及连接滑杆的剖面结构示意图;
图7为本发明实施例提供桶体以及底座剖面的结构示意图;
图8为本发明实施例提供的B处放大结构示意图;
图9为本发明实施例提供的C处放大结构示意图。
图10为本发明实施例提供的锥形连接嘴的结构示意图;
图11为本发明实施例提供的支撑板以及支杆的结构示意图
图12为本发明实施例提供的支撑杆以及卡止件的结构示意图;
图13为本发明实施例提供的支撑杆以及卡止件另一视角的结构示意图;
图14为本发明实施例提供的铰接杆以及齿轮杆的结构示意图;
图15为本发明实施例提供的转动柱未插进固定壳内时,传动机构与传动齿轮组的结构示意图;
图16为本发明实施例提供的转动柱未插进固定壳内时,传动机构、传动块以及传动齿轮组的平面结构示意图;
图17为本发明实施例提供的D处放大结构示意图;
图18为本发明实施例提供的转动柱插进固定壳内时,传动机构、传动块以及传动齿轮组的平面结构示意图;
图19为本发明实施例提供的调节螺母以及限位杆的结构示意图;
图20为本发明实施例提供的调节螺母以及限位杆的剖面结构示意图。
附图标记说明:
1、桶体;101、固定条;102、滤网;103、支撑脚;2、桶盖;201、安装块;3、底座;301、连接槽;302、旋转门;303、红外感应器;4、传动座;5、固定壳;6、固定长壳;7、伸缩长杆;71、支撑长杆;711、圆形滑杆;72、连接滑杆;8、支杆;81、缓冲凸块;82、缓冲弹簧;83、连接杆;831、驱动圆杆;84、链齿;9、支撑板;91、固定板;901、滑槽;911、锁止扣;10、链条;11、伸缩杆;12、波纹管;13、固定杆;131、浮力块;14、铰接杆;16、伸缩铰接杆;17、锥形嘴;18、滑动板;19、第一弹簧;20、锥形连接嘴;21、齿轮杆;2101、半形齿轮;22、传动块;221、第二弹簧;23、主动齿轮;231、第一传动齿条;232、第二传动齿条;24、第一传动齿轮;241、调节转动块;25、第二传动齿轮;251、转动柱;26、调节螺母;27、螺纹块;271、矩形套筒;272、矩形杆;273、限位杆;28、旋转托板;281、收集框;282、弹性板;29、旋转轴;30、锁止块;31、弯型铰接杆;32、第三弹簧;33、弹簧块;501、锁止卡槽;2811、第一触头;2821、第二触头。
具体实施方式
为使得本公开实施例的目的、技术方案和优点更加清楚,下面将结合本公开实施例的附图,对本公开实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本公开的一部分实施例,而不是全部的实施例。基于所描述的本公开的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本公开保护的范围。
除非另外定义,本公开使用的技术术语或者科学术语应当为本公开所属领域内具有一般技能的人士所理解的通常意义。本公开中使用的“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,还可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
请参阅1-9,一种电机控制分类垃圾桶,包括多个桶体1,每个桶体1上均活动设置有桶盖2,桶体1的背面设置有固定壳5,桶体一侧的竖直方向上滑动设置有伸缩长杆7以及支撑长杆71,伸缩长杆7的一端铰接在桶盖2上;固定壳5设有传动机构,传动机构包括主动齿轮23以及分别与主动齿轮23相啮合的第一传动齿条231及第二传动齿条232,主动齿轮23转动安装于固定壳5内,第一传动齿条231以及第二传动齿条232均竖直滑动设置在固定壳5内,固定壳5内滑动设置有传动块22,第一传动齿条231的底端固定安装于传动块22上,第二传动齿条232的顶端固定安装于伸缩长杆7上,传动块22的外壁上活动套接有第二弹簧221;传动块22上还设有用于锁止传动块22的锁止组件;桶体1的底部设有底座3,底座3的顶部固定设置有传动座4,且传动座4内设有驱动单元,驱动单元的输出轴上转动安装有转动柱251,转动柱251能够拉开的插接于固定壳5内,且在转动柱251插接至固定壳5内时,转动柱251能够与传动块22相抵触以使得传动块22通过传动机构带动伸缩长杆7下移;固定壳5内还转动连接有调节转动块241,支撑长杆71的下端固定设置有圆形滑杆711;伸缩长杆7下移的使得圆形滑杆711的底端能够与调节转动块241的侧面相接触;驱动单元通过传动齿轮组驱动调节转动块241旋转,本发明通过在桶体1的侧壁设置固定壳5,在固定壳5内设置传动块22,以及传动机构,然后在桶体1的底部设置底座3以及传动座4,通过与传动之间的配合实现当需要进行倾倒垃圾,需要将筒体与底座3分离时,能够通过固定壳5内部设置的结构实现桶盖2处于常开状态,即便于对桶体1内部垃圾的倾倒,且避免桶盖2的来回翻碰撞,提高桶盖2使用寿命;当需要往桶体1内扔垃圾时,可通过底座3上设置的红外感应器303进行感应,然后将信号传递给相应红外接收器,以驱动相应电连接的驱动单元转动,然后通过传动齿轮组带动调节转动块241转动,即带动支撑长杆71向上运动,将桶体1上的桶盖2撑开,即实现在不同的时期对桶盖2进行不同传动方式进行撑开,便于桶体1垃圾对垃圾车内的倾倒以及向桶体1内扔垃圾,使用较为方便,即在桶体1与底座3脱离时,传动座4上设置的转动柱251脱离固定壳5,且在插接时,依靠桶体1底部设置的支撑脚103与底座3进行定位,当支撑脚103插进相应底座3上开设的槽内,且与滑动板18接触时,能够使得转动柱251插入固定5内,且与传动块22抵接。
具体的,本实施例中,锁止组件包括锁止块30、弯型铰接杆31以及弹簧块33,锁止块30以及弯型铰接杆31的数量均为两个,两个弯型铰接杆31均转动设置在传动块22内,两个锁止块30水平滑动设置在传动座4内,弯型铰接杆31的一端活动设置在锁止块30上开设的U型槽内,另一端活动设置在弹簧块33上开设的U形槽内;传动块22内还设有第三弹簧32,第三弹簧32的一端固定设置在弹簧块33上;固定壳5内开设有两个与锁止块30像适配的锁止卡槽501,且两个锁止块30能够插接至两个相应位置的锁止卡槽501内。
本发明提供的伸缩长杆7的顶端滑动设置有两个连接滑杆72,桶盖2的内部固定设有安装块201,支撑长杆71和连接滑杆72的一端均活动设置在安装块201上开设的U形槽内。
进一步的,传动齿轮组包括第一传动齿轮24以及第二传动齿轮25,第一传动齿轮24活动设置在固定壳5内,且与调节转动块241固定连接,第二传动齿轮25固定设置在驱动单元的输出轴上,并与转动柱251同轴心,且当转动柱251位于固定壳5内时,第一传动齿轮24与第二传动齿轮25相啮合。
更进一步的,桶体1的背面固定设置有固定长壳6,伸缩长杆7设置于固定长壳6内。
本发明进一步提出的方案中,桶体1相对两侧的外壁上均设置有固定条101,固定条101的设置能够便于现有技术中的垃圾车对桶体1的夹持,便于倾倒。
本发明提供的实施例中,底座3的前方设有红外感应器303,红外感应器303与驱动单元电连接,当人员站于红外感应器303的感应范围内时,红外感应器将信号传递给内部设置的驱动单元上,驱动单元转动转动四分之一圈,即将桶盖打开,红外感应器与驱动单元的连接以及使用方法均为本领域技术人员的公知常识以及管用技术手段,不赘述。
具体的,每相邻底座3之间均设有两组连接机构,每个连接机构均包括调节螺母26、螺纹块27以及限位杆273,调节螺母26和螺纹块27的数量均为两个,两个调节螺母26相转动连接,两个螺纹块27分别螺纹连接在两个调节螺母26内,其中一个螺纹块27的侧壁上固定安装有矩形套筒271,另外一个螺纹块27侧壁上固定安装有矩形杆272,矩形杆272的一端插接至矩形套筒271内,两个螺纹块27的一侧均固定安装有限位杆273,且限位杆273的一端贯穿并延伸至调节螺母26的外侧,且底座3上开设有与限位杆273相适配的连接槽301,且限位杆273可插接至连接槽301内。
本发明进一步提供的方案中,本发明进一步提供的实施例中,底座3内的竖直方向上设置有收集机构,收集机构包括支撑板9,支撑板9内转动设置有至少四个用于将垃圾袋撑起的支杆8,支杆8的一端设有卡止件,桶体1通过波纹管12连通于支撑板9的下方,支撑板9内固定设置有与支杆8一一对应的固定板91,固定板91内设有用于锁卡止件的锁止机构,支撑板9底部设置的固定杆13上套设有浮力块131,且固定杆13上设有传动铰接组件,且当浮力块131上升至设定位置(设定位置,即在垃圾袋内收集到一定高度的臭水时,浮力块上升至此高度时,其通过传动铰接组件驱动锁止机构解除对卡止件的锁止)时,推动传动铰接组件驱动锁止机构解除对卡止件的锁止,(假设垃圾袋的设计容量为3L,本实施例将其三分之二的容量也即2L作为设定位置,以其在臭水达到2L时,解除对垃圾袋的支撑,使垃圾袋掉落至收集框281内,那么本实施例的设定位置即为臭水达到2L时浮力块131所处的位置),在传动铰接组件驱动锁止机构解除对卡止件的锁止后,在垃圾袋内部盛有的臭水的重力下,带动四个已经解除限制的支杆8向下摆动,即解除对垃圾袋的支撑,使垃圾袋掉落至收集框281内,通过在底座3内设置臭水收集机构,可将桶体1内部的臭水通过锥形嘴17流至相连通的锥形连接嘴20,然后通过波纹管12流入至垃圾袋内,从而能够对垃圾桶内的臭水进行收集,然后通过在通过在底座3内部设置卡止件以及锁止机构,然后通过浮力块131以及铰接杆14,可通过垃圾袋内的臭水的高度带动浮力块131上升,到达设定高度时,可通过驱动铰接杆14以及锁止机构,即解除对卡止件的锁止,即将已收集好的垃圾袋落入至收集框281内,然后触发旋转托板28进行旋转,旋转过后,伸缩杆11带动支撑板9下移进行套袋,然后通过在底座3内设置链条10以及在支杆8上设置相适配的链齿84,在伸缩杆11下移的过程中驱动支杆8对垃圾袋进行支撑,从而可实现对垃圾桶内臭水的收集,且垃圾袋收集完毕后,能够自动对已盛有臭水垃圾袋进行拆卸,且能够自动更换新的垃圾袋,便于对桶体1内臭水的持续收集,且使用较为方便。
具体的,本实施例中,卡止件包括连接杆83以及驱动圆杆831,连接杆83固定设置在支杆8上,且驱动圆杆831活动设置在连接杆83上开设的U型通槽内,固定板91内开设有滑槽901,驱动圆杆831位于滑槽901内,锁止机构包括锁止扣911,锁止扣911滑动设置在固定板91内,且驱动圆杆831能够卡接至锁止扣911上开设的锁止槽内,锁止扣911上开设有圆角,圆角开设在锁止槽的相对面,主要便于驱动圆杆831卡在锁止槽内,锁止扣911的外侧套设有弹簧,在弹簧的弹力下,锁止扣911向滑槽901的方向移动,本发明提供的,传动铰接组件包括与锁止扣911一一对应的铰接杆14以及齿轮杆21,铰接杆14分别转动设置在固定杆13上,齿轮杆21设置于固定杆13内,铰接杆14上固定设置有半形齿轮2101,且半形齿轮2101和齿轮杆21相啮合,铰接的上端活动设置在相应锁止扣911上开设的U形通槽内,铰接杆14与齿轮杆21的设置主要能够保持多个铰接杆14在受到浮力块131的浮力时,能够保持同步运动从而可保持锁止扣911同步解除对驱动圆杆831的锁止,进而保证四个支杆8同时下垂,使盛有臭水的垃圾袋稳定的落入收集框281内。
进一步的,底座3内固定设置有伸缩杆11,伸缩杆11的输出轴固定设置在支撑板9上,伸缩杆11也与红外线感应器相连接,即在旋转托板28底部设置的驱动电机旋转180°后,伸缩杆11的伸缩端向下运动,即带动支撑板9向下运动,完成下一次支杆8的套袋动作。
更进一步的,底座3内固定安装有链条10,链条10的下端固定设置在支杆8上,支杆8上设有与链条10相适配的链齿84,链条10与链齿84相啮合,通过设置的链条10以及相适配的链齿84,可在支撑板9下移的过程中,带动支杆8沿着与支撑板9相铰接的轴旋转,带动支板撑开,且带动驱动圆杆831卡在锁止扣911上开设的锁止槽内,完成支杆8的撑开,链条的安装位置如图13所示的a点处。
本发明进一步提出的方案中,支杆8远离连接杆83的一端开设的凹槽内滑动设置有缓冲凸块81,且凹槽内设有缓冲弹簧82,在缓冲弹簧82的弹力下,缓冲凸块81凸出支杆8,通过在支杆8上设置缓冲弹簧82以及缓冲凸块81,即在垃圾袋沿着支杆8向下滑动即将脱离的时候,会被支杆8上设置的缓冲凸块81以及缓冲弹簧82进行缓冲,致使垃圾袋不会快速下落,以保证垃圾袋的较为平稳的下落至收集框281内,极大的降低臭水溅出的情况。
本发明提供的实施例中,底座3内还设有旋转轴29,旋转轴29的输出轴上固定设置有旋转托板28,旋转托板28的上方对称设置有用于盛放垃圾袋的收集框281,收集框281内设有弹性板282,且弹性板282的下方设有第一触头2811,收集框281的底部设有与第一触头2811相适配的第二触头2821,旋转轴29内设置有驱动电机,且当第一触头2811与第二触头2821相接触时,连通控制驱动驱动电机的行程开关,即通过驱动电机转动带动旋转托板28旋转180°后停止,且当旋转托板28旋转180°停止后,伸缩杆11(伸缩杆为电动伸缩杆)随即向下做往复运动一次(通过第一触头与第二触头相接触,先后控制驱动电机以及电动伸缩杆,其具体工作原理为本领域技术人员的公知常识以及惯用技术手段,不赘述)。
具体的,旋转托板28的底部设有支撑滚轮,且底板的侧壁上设有旋转门302,旋转门302便于工作人员将收集的臭水进行拿出,便于换上新的垃圾袋。
本发明进一步的方案中,桶体1的底部均固定连通有锥形嘴17,桶体1的底部桶体1的底部设有底座3,底座3的上方滑动设置有锥形连接嘴20,且锥形连接嘴20位于锥形嘴17的下方;桶体1的底部均匀设有四个支撑脚103,底座3上的凹槽内设有与支撑脚103相对应的滑动板18,且凹槽内设有第一弹簧19,锥形连接嘴20和每个滑动板18之间均设有伸缩铰接杆16,伸缩铰接杆16铰接在底座3上,且伸缩铰接杆16的一端活动设置在锥形连接嘴20上开设的U型槽内,另一端铰接在滑动板18上;通过设置锥形的嘴以及相配合的锥形连接嘴20,可在桶体1放置在底座3上的时候,更好的使垃圾桶与底座3内的臭水收集装置连通,通过在桶体1的底部设置与桶体1底部支撑脚103相配合的底座3,可快精准的将底座3上的锥形连接嘴20与桶体1底部设置的锥形嘴17相连通,从而在进行保护锥形连接嘴20的过程中,能够实现锥形嘴17与锥形连接嘴20之间的快速配合以及连通,便于底座3内臭水收集装置对桶体1内臭水的收集。
进一步的,收集机构包括支撑板9,锥形连接嘴20固定连通有波纹管12,波纹管12的另一端连通于支撑板9内,且另一端的端口位于支撑板9的下方。
更进一步的,桶体1底部开设有锥形槽,且锥形嘴17位于锥形槽内,锥形连接嘴20插接于锥形槽内,锥形嘴17与锥形连接嘴20相连通。
本发明的使用方法:当桶体1脱离底座3时,在第二弹簧221的弹力下,传动块22沿着滑动方向竖直向下运动,从而通过传动机构,即带动伸缩长杆7相应的向上运动,从而伸缩长杆7将桶盖2顶起,桶盖2打开,此时内部的结构如图16所示,即在桶体1脱离底座3时,通过伸缩长杆7的支撑,桶盖2始终处于张开状态,且通过锁止组件的设置,通过两个锁止块30分别卡在固定壳5开设的锁止卡槽501内,从而可将传动座4固定在此位置,即使传动机构以及相连接的伸缩长杆7也处于锁止状态,可保证垃圾桶盖2处于常开状态,且不会发生晃动,便于倾倒垃圾,当将桶体1放置在相应的底座3上时,底座3上设置的转动柱251会抵进固定壳5内,从进入传动块22底部开设的半圆凹槽内,在进入的过程中,传动座4会首先与半圆凹槽内的弹簧块33相接触,然后在桶体1的自身重力下,向上压动弹簧块33,使弹簧块33向第三弹簧32的方向移动,从而带动相连接的弯型铰接柱沿着铰接轴转动,即带动弯型铰接柱另一端相铰接的两个锁止块30向弹簧块33的方向滑动,即脱离固定壳5内开设的锁止卡槽501,解除对传动块22的锁止,然后在桶体1自身的重力下,压动以解除的传动块22向上运动,即带动相连接的第一传动齿条231向上运动,通过主动齿轮23的传动带动第二传动齿条232以及与之相连接的伸缩长杆7向下运动,从而带动与伸缩长杆7相铰接的桶盖2向下运动,此时的桶盖2处于合拢状态,且与支撑长杆71相连接的圆形滑杆711也向下运动,插在调节转动块241的凹面处内,在转动柱251完全插进凹槽内时,固定座内设置的驱动单元输出轴上固定安装的第二传动齿轮25与固定壳5内活动设置的第一传动齿轮24相啮合,由于第二传动齿轮25固定设置在驱动单元的输出轴上,然后当红外发射器感应到固定座前方的有物体时,会将信号传递给红外接收器,然后将信号传递给驱动单元,驱动单元开始转动,此时设置驱动单元转动四分之一圈后停止,即带动输出轴上固定连接的第二传动齿轮25转动,第二传动齿轮25带动相啮合的第一传动齿轮24转动,从而带动相固定连接的调节转动块241转动四分之一圈,此时会驱动圆形滑杆711沿着调节转动块241的接触面上滑动,当转动块转动四分之一圈时,此时圆形滑杆711向上移动一段距离此过程中,由于转动柱251压动着传动块22,且通过传动机构的限制,伸缩长杆7不会向上移动,从而带动相连接的支撑长杆71向上移动,支撑长杆71向上带动相铰接的桶盖2打开,然后即可将桶盖2打开,然后使用人员将垃圾放入垃圾桶内,当人员离开感应区时,此时设置驱动电机停止转动3-5秒后再一次转动四分之一圈,即按照上述传动方法带动调节转动块241转动四分之一圈,此时调节转动块241处于凹面处,圆形滑杆711沿着调节转动块241的接触面竖直向下运动,从而带动相连接的支撑长杆71向下运动,即带动相连接的桶盖2向下运动,使桶盖2合拢,从而即在桶体1脱离底座3,进行倒入垃圾车的时候,垃圾桶该始终处于打开状态;在桶体1放置在底座3上时,且有人员站在红外感应器303的感应区进行扔垃圾的时候,会通过驱动单元带动转动,然后通过第一传动齿轮24以及第二传动齿轮25将动力传递给调节转动块241,从而可通过圆形滑杆711以及支撑长杆71带动桶盖2打开,适用于不同的使用场景;
在垃圾桶放置在底座3上时,垃圾桶底部的支撑脚103插在相应位设置的滑动板18上,即带动滑动板18向下运动,滑动板18带动相连接的伸缩铰接杆16沿着与底座3相铰接的轴旋转,从而带动与之相铰接的锥形连接嘴20向上运动,使锥形连接嘴20与锥形嘴17相连通;当桶体1内有臭水时,臭水向下流动,臭水首先通过垃圾桶底部设置的过滤网102进行过滤,然后过滤后的臭水通过锥形嘴17流入至相连通的锥形连接嘴20,从而臭水通过锥形连接嘴20流入至波纹管12内,然后通过波纹管12流入至被支杆8撑起的垃圾袋内,撑起状态为,每个支杆8沿着固定板91内开设的滑槽901向下移动,即连接杆83上U型槽内设置的驱动圆杆831沿着滑槽901向下滑动,卡在锁止扣911上开设的卡槽内,此时即支杆8处于水平状态,即将垃圾袋撑开,然后臭水逐渐的进入下方被撑起的垃圾袋内,在臭水的水位逐渐增高时,会带动浮力块131向上移动,在长时间的收集后,浮力块131会逐渐向上运动,当运动到设定位置时,会与铰接杆14的底部相接触,然后带动铰接杆14沿着与固定杆13相铰接的轴转动,从而带动铰接杆14的另一端向靠近固定杆13的方向移动,即带动锁止扣911向远离驱动圆杆831的方向移动,从而使驱动圆杆831脱离锁止槽,失去锁止扣911的限制,即在已经盛有臭水的垃圾袋在自身重力下向下滑动,且支杆8也向下下垂,在垃圾袋即将脱离支杆8的时候,会被支杆8上设置的缓冲凸块81进行缓冲,致使垃圾袋不会快速下落,以保证垃圾袋的较为平稳的下落至收集框281内,极大的降低臭水溅出的情况,且落入在收集框281内,然后在垃圾袋以及内部臭水重力的作用下,压动弹性板282,然后弹性板282下方设置的第二触头2821与收集框281内底部设置的第一触头2811相接触,即带动旋转轴29转动的驱动电机转动180°后停止,从而带动旋转托板28旋转180°后停止,于此同时,同时驱动伸缩杆11向下运动,即带动相连接的支撑板9向下运动,当运动一段距离后,每个支杆8的下端部均位于垃圾袋袋口内时,此时拉紧链条10,然后在向下运动时,会同时带动链条10以及与链条10一端相连接的支杆8沿着与支撑板9相铰接的铰接轴旋转,从而带动连接杆83以及驱动圆杆831沿着滑槽901向下运动,在持续运动的过程中,会压动锁止扣911,继续向下移动,卡接在锁止扣911上的开设的卡槽内此时的连接的下端部位于收集框281的上方此时,即带动每个支杆8向外张开,然后将垃圾袋撑起,然后伸缩杆11回到初始位置,即带动支撑板9以及被撑起的垃圾袋向上运动,使垃圾袋脱离弹性板282,此时即将垃圾袋撑开,进行回收臭水,且已经收集好的臭水进行旋转至靠近旋转门302的位置处,然后工作人员通过打开旋转门302,进行清理,将盛有臭水的垃圾袋拿出,然后将新的垃圾袋放置在收集框281内,在放置的时候,需要将垃圾袋的袋口高出收集框281的框口,便于下次支杆8的自动套袋,优选的,可选用袋口具有非弹性的束口绳垃圾袋,更加便于支杆的对其进行支撑套袋。
在进行安装各个底座3时,为了增加各个分类垃圾桶底座3的稳定性能,本发明在相邻底座3之间通过分别两组连接装置进行连接,在进行连接时,首先分别将每个连接装置上的两个限位杆273分别插入两个相邻桶体1上开设的连接槽301,然后再分别反向拧动两个调节螺母26,由于两个螺纹块27上分别设置有相互插接的矩形套筒271以及矩形杆272,从而在进行拧动两个调节螺母26时,可分别使内部设置的块沿着调节螺母26移动,从而可将两个限位杆273进行锁紧,即可将两个相邻间的底座3进行连接,增加相邻底座3之间的连接性能。
以上只通过说明的方式描述了本发明的某些示范性实施例,毋庸置疑,对于本领域的普通技术人员,在不偏离本发明的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,上述附图和描述在本质上是说明性的,不应理解为对本发明权利要求保护范围的限制。
- 一种电机控制分类垃圾桶
- 一种自动分类垃圾桶电机控制电路板布局结构