一种基于电液制动系统的车辆减速度控制方法
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及汽车制动系统,尤其是一种基于电液制动系统的车辆减速度控制方法。
背景技术
汽车制动系统与汽车行车安全密切相关。近些年来,随着新能源汽车技术的大力发展,越来越多的技术被开发以及使用,其中包括单踏板技术。所谓的单踏板技术,简单来说,只需要控制加速踏板,就可以实现起步、加速、减速(制动)等操作。单踏板计算的运用,对于电动车来说不仅可以提供更好的动能回收,增加续航里程的能力,而且可以提高驾驶舒适性,减轻因城市交通拥挤带来的疲惫感。
但是单踏板模式改变了人们对于汽车驾驶的固性思维,在平时的操作或者在极端制动工况下,由于人们固性思维的原因可能会导致交通事故的发生。
发明内容
为了解决上述问题,本发明的主要目的在于吸取单踏板技术的优点,提供一种具有高效的制动能量回收、更高的舒适性的车辆减速度控制方法,而且不改变人们现有的驾驶习惯。
根据上述目的,本发明所采用的技术方案是一种基于电液制动系统的车辆减速度控制方法,包括以下步骤:
步骤一、获取车速和加速踏板开度信号,根据预设的加速踏板特性数据标定图,确定由车速和加速踏板开度组成的二维坐标点的位置,以及判断车辆处于踩下加速踏板状态还是松开加速踏板状态;
步骤二、判断车辆处于加速状态、制动状态还是滑行状态;
步骤三、根据车辆所处的三种状态分别按照以下方式对车辆进行控制:
①当判断车辆处于制动状态时,根据预设的车速和加速踏板开度的插值函数计算得到此时车辆的减速度a,从而得出此时需求的制动总力矩T
若动力电机允许回馈的最大制动力矩T
若动力电机允许回馈的最大制动力矩T
②当判断车辆处于加速状态时,根据预设的车速和加速踏板开度的插值函数计算车辆需求的驱动力矩,然后由整车控制器发给电机控制器,电机控制器控制动力电机进行响应,通过动力电机驱动车辆加速;
③当判断车辆处于滑行状态时,若滑行状态的滑行减速度为0,则整车控制器不作任何请求;若滑行状态的滑行减速度不为0,则控制方式与步骤①车辆处于制动状态时一样。
进一步地,步骤二中,根据预设的加速踏板特性数据标定图,判断车辆处于加速状态、制动状态还是滑行状态的具体方式为:
由车速和加速踏板开度组成的二维坐标点位于加速踏板特性数据标定图的零点线下方时,如果车辆处于踩下加速踏板状态,则车辆驱动力矩为正,制动力矩为0,车辆处于加速状态;如果车辆处于松开加速踏板状态,则车辆驱动力矩为0,制动力矩为0,车辆处于滑行状态;
由车速和加速踏板开度组成的二维坐标点位于加速踏板特性数据标定图的零点线上方时,如果车辆处于踩下加速踏板状态,则车辆驱动力矩为0,制动力矩为0,车辆处于滑行状态;如果车辆处于松开加速踏板状态,则车辆驱动力矩为0,制动力矩为正,车辆处于制动状态。
进一步地,在步骤三中,车辆制动过程的制动力矩分配由电液制动系统控制器完成,动力电机允许回馈的最大制动力矩T
更进一步地,加速踏板总制动力矩换算的减速度为预设可调数值。此值可以根据实际情况进行更改。
在一个优选实施例中,加速踏板总制动力矩换算的减速度最大值设定为0.5g,根据预设的车速和加速踏板开度的插值函数计算得到车辆的减速度a数值范围为0-0.5g。
更进一步地,若车辆制动所需减速度超过加速踏板总制动力矩换算的减速度最大值,驾驶员需要踩下制动踏板控制电液制动系统建立制动压力。
踩下制动踏板时,电液制动系统按照以下两种工况建立制动压力:
第一种工况:如果松下加速踏板的过程中,电液制动系统控制器计算的摩擦制动力矩T
第二种工况:如果松下加速踏板的过程中,电液制动系统控制器计算的摩擦制动力矩T
实现上述方法的车辆部件主要包括电液制动系统、加速踏板、制动踏板、整车控制器、动力电机等。加速踏板为本发明中车辆减速度控制的主要部件。
电液制动系统为新型的电机助力液压制动系统,取代了传统的真空助力液压制动系统。电液制动系统的基本原理为:伺服电机根据踏板行程的变化,利用蜗轮蜗杆和齿轮齿条的传动推动主缸活塞运动,从而进行建压。所述的电液制动系统在结构设计上实现人力制动与电机助力制动完全解耦,更有利于再生制动的制动力分配。在本发明里电液制动系统需要计算车辆所需的总制动力矩,然后进行制动力矩的分配。
整车控制器为本发明中车辆的控制大脑。整车控制器能实时地根据加速踏板的开度信号和车辆速度信号进行车辆加速度的控制;除此之外,整车控制器需要把车辆能提供的电机回馈力矩发给电液制动系统。整车控制器需要执行电液制动系统发来的制动回馈力矩的请求。
根据上述技术方案,本发明达到以下有益效果:
1.本发明在满足应急制动的条件下,能最大限度地进行制动能量回收,制动能量回收的减速度最大可达0.8g。
2.要实现本发明,对于装有电液制动系统的车辆,硬件不需要做改变。
3.本发明的加速踏板控制的最大减速度为0.5g,既满足车辆的日常工况使用,大减速度下又不会改变驾驶员的驾驶习惯,更加安全和舒适。
4.本发明对于单独加速踏板能控制的最大减速度,可以根据车型的不同可以进行标定和改变。
5.本发明中的电液制动系统还可以根据自己本身的特征继续进行特定功能的扩展,比如线控制动、自动驻车、陡坡缓速等。
附图说明
图1是根据本发明一种基于电液制动系统的车辆减速度控制方法的加速踏板特性数据标定图(PedalMap)。
图2是本发明一种基于电液制动系统的车辆减速度控制方法的减速度和加速度插值示意图。
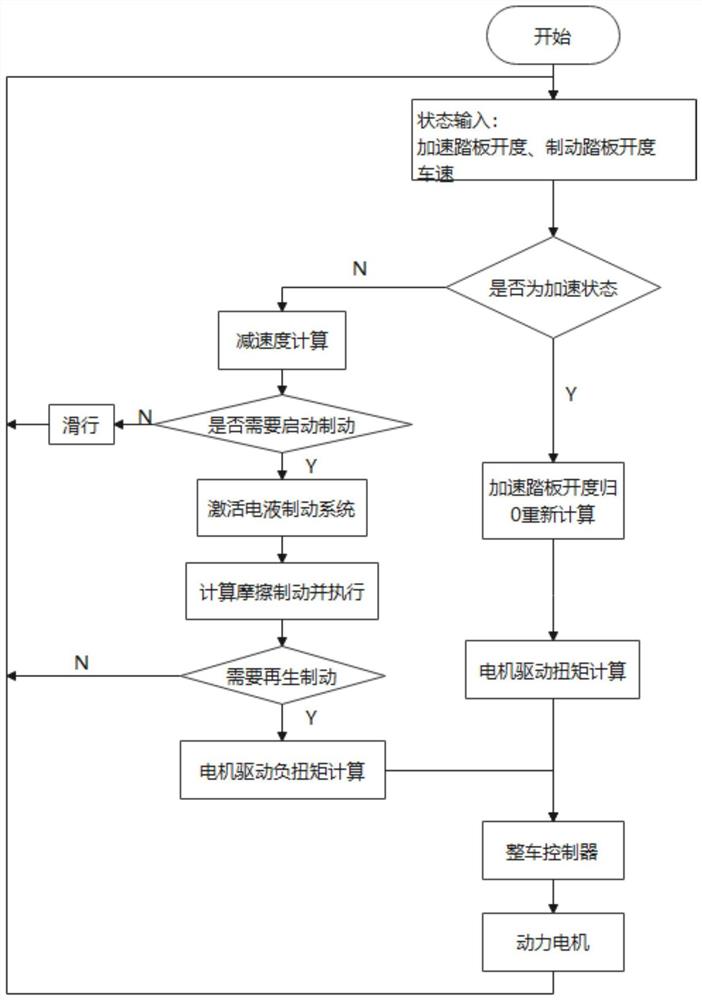
图3是根据本发明一种基于电液制动系统的车辆减速度控制方法的控制流程图。
具体实施方式
为了使本技术领域的人员更好地理解本发明,下面将结合实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员所做的等效变化与修饰前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
本实施例提供一种基于电液制动系统的车辆减速度控制方法,包括以下步骤:
步骤一、获取车速和加速踏板开度信号,根据预设的加速踏板特性数据标定图,确定由车速和加速踏板开度组成的二维坐标点的位置,以及判断车辆处于踩下加速踏板状态还是松开加速踏板状态;
步骤二、判断车辆处于加速状态、制动状态还是滑行状态;
步骤三、根据车辆所处的三种状态分别按照以下方式对车辆进行控制:
①当判断车辆处于制动状态时,根据预设的车速和加速踏板开度的插值函数计算得到此时车辆的减速度a,从而得出此时需求的制动总力矩T
若动力电机允许回馈的最大制动力矩T
若动力电机允许回馈的最大制动力矩T
②当判断车辆处于加速状态时,根据预设的车速和加速踏板开度的插值函数计算车辆需求的驱动力矩,然后由整车控制器发给电机控制器,电机控制器控制动力电机进行响应,通过动力电机驱动车辆加速;
③当判断车辆处于滑行状态时,若滑行状态的滑行减速度为0(不算地面阻力和空气阻力),则整车控制器不作任何请求;若滑行状态的滑行减速度不为0(不算地面阻力和空气阻力),则控制方式与步骤①车辆处于制动状态时一样。
车辆制动过程的制动力矩分配由电液制动系统控制器完成,动力电机允许回馈的最大制动力矩T
其中,预设的加速踏板特性数据标定图(PedalMap)如图1所示,车辆的加速和减速的驱动力矩和制动力矩的请求来自于车辆的速度和加速踏板开度的插值函数;
零点线来自于不同车辆标定时的数据确定;
结合PedalMap,判断车辆处于加速状态、减速状态还是滑行状态的具体方法为:
加速踏板开度和车速组成的二维坐标点位于零点线下方(B区域内)时,如果车辆处于踩下加速踏板时,则车辆驱动力矩为正,制动力矩为0,车辆处于加速状态。如果车辆处于松开加速踏板时,则车辆驱动力矩为0,制动力矩为0,车辆处于滑行状态。
加速踏板开度和车速组成的二维坐标点位于零点线上方(A区域时)时,如果车辆处于踩下加速踏板时,则车辆驱动力矩为0,制动力矩为0,车辆处于滑行状态。如果车辆处于松开加速踏板时,则车辆驱动力矩为0,制动力矩为正,车辆处于制动状态。
图2所示的为车辆处于加速状态和减速状态的加减速插值示意图。车辆处于加速状态时,车辆的扭矩计算方式为:目前踏板开度减去现在车辆车速对应的踏板开度再乘以目前能提供的最大驱动扭矩。车辆处于减速状态时,以目前车速对应的零点线的减速度为0,0加速踏板开度为0.5g,插值求出目前加速踏板开度对应的减速度a。加速踏板总制动力矩换算的减速度最大值为预设可调数值,本实施例中设定为0.5g,根据预设的车速和加速踏板开度的插值函数计算得到车辆的减速度a数值范围为0-0.5g。
请参阅图3,本实施例一种基于电液制动系统的减速度控制方法的控制步骤如下:
开始;
状态输入:输入加速踏板开度、制动踏板开度和车速信号输入整车控制器;
判断是否为加速状态:整车控制器根据预设的加速踏板特性数据标定图,确定由车速和加速踏板开度组成的二维坐标点的位置,结合加速踏板的踩下或松开的动作,判断车辆是否处于加速状态,是则直接进入下一步,否则进行减速度计算;
车辆处于加速状态时,加速踏板开度归0重新计算;
根据重新计算后的加速踏板开度计算驱动电机扭矩;
车辆处于非加速状态时,首先计算减速度,根据减速度得出此时需求的制动总力矩T
若需要启动电液制动系统则激活电液制动系统,计算摩擦制动力矩T
电液制动系统提供摩擦制动力矩T
整车控制器根据接收的电机驱动扭矩和电机驱动负扭矩信号,计算得到驱动动力电机的扭矩信号,然后发给电机控制器,电机控制器控制动力电机进行响应。
本实施例中,若车辆制动所需减速度超过加速踏板总制动力矩换算的减速度最大值,驾驶员需要踩下制动踏板控制电液制动系统建立制动压力。
踩下制动踏板时,电液制动系统按照以下两种工况建立制动压力:
第一种工况:如果松下加速踏板的过程中,电液制动系统控制器计算的摩擦制动力矩T
第二种工况:如果松下加速踏板的过程中,电液制动系统控制器计算的摩擦制动力矩T
以上所述仅为本发明较佳的实施方式,并非用以限定本发明的保护范围;同时以上的描述,对于相关技术领域中具有通常知识者应可明了并据以实施,因此其他未脱离本发明所揭露概念下所完成之等效改变或修饰,都应涵盖在本发明的保护范围之内。
- 一种基于电液制动系统的车辆减速度控制方法
- 一种交流变频电驱运输车辆电液耦合制动系统及控制方法