一种船载动中通用天线
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及一种船载动中通用天线,属于卫星天线技术领域。
背景技术
海洋环境极其复杂,地球上三分之二的表面都是被海水覆盖,随着现代移动通信系统快速发展,海上作业、海上运输的船员和国家海洋安全保卫人员,对了解国家时事新闻和市场动态信息都有迫切需求,这使得海上通信尤为重要,但在实际应用中船体在海上航行过程遇到风浪较大或船体摇晃剧烈时,船体会面临横摇、纵摇以及船体的转向等复合运动,原有的方位及俯仰转动无法满足天线精确工作,无法实现俯仰过顶连续跟踪,不易随海浪颠簸起伏状态下跟踪对准卫星,完成通信信号的接收和发送。
发明内容
有鉴于此,本发明提供一种船载动中通用天线,能够在恶劣的环境条件下天线始终对准所用的卫星,并对卫星进行连续追踪,保证信号的平稳。
本发明提供一种船载动中通用天线,其包括天线面组件、结构转台、伺服控制系统;所述结构转台承载伺服控制系统,所述结构转台由俯仰机构、横滚机构、方位机构组成,所述方位机构由方位底座、方位传动机构、方位转台、滑环组成,所述方位转台位于方位传动机构上方,所述横滚机构位于方位机构上方,所述横滚机构由交换机、伺服组件、横滚转动机构、横滚支臂组成,所述俯仰机构由俯仰传动机构、俯仰配重、俯仰支臂组成,所述俯仰支臂与横滚转动机构相连接,所述天线面组件与俯仰支臂相连接,所述俯仰配重、俯仰传动机构分别位于俯仰支臂两侧,所述伺服控制系统包括惯性传感器、伺服驱动单元、载波接收机、电机驱动器、零位开关、供电单元、主控单元、北斗/GPS定位接口,所述电机驱动器包括方位电机驱动器、俯仰电机驱动器、横滚电机驱动器,所述方位电机驱动器、俯仰电机驱动器、横滚电机驱动器分别与方位传动机构、俯仰传动机构、横滚转动机构相连接,所述天线面组件包括接收链路LNB、发射链路BUC、惯导,所述载波接收机通过接收链路LNB接收卫星下行信号,跟踪接收卫星载波信号,所述惯导为天线本体姿态采集模块,所述伺服系统控制包括通过北斗/GPS、惯导测量出航向角及载体所在位置的经度和纬度,确定以水平面为基准的天线俯仰和极化角,通过载波接收机判断出卫星信号相对于天线的位置,方位电机驱动器、俯仰电机驱动器、横滚电机驱动器驱动方位传动机构、俯仰传动机构、横滚转动机构调整天线方位角使天线自动对准卫星,所述主控单元不断采集惯导和北斗/GPS数据并进行计算,主控单元根据载波接收机反馈信号的判断天线是否准确对准卫星,如未准确对准卫星则重新调整天线面,直到使其准确对卫星为止,所述主控单元内设有动中通伺服控制系统软件。
所述方位传动机构7由相啮合的第一齿轮、第二齿轮、方位电机组成,所述第一齿轮、第二齿轮位于方位转台与方位底座之间,所述方位电机位于方位转台上,所述方位电机与第一齿轮相连接,所述方位电机驱动器与方位电机相连接,所述横滚机构、滑环位于方位转台上,所述滑环为帽式滑环,所述横滚转动机构由相啮合的第三齿轮、第四齿轮、横滚电机组成,所述横滚电机与第三齿轮相连接,所述横滚电机驱动器与横滚电机相连接,所述俯仰传动机构由相啮合的第五齿轮、第六齿轮、俯仰电机组成,所述俯仰电机与第五齿轮相连接,所述俯仰电机驱动器与俯仰电机相连接,所述天线面组件、结构转台、伺服控制系统外侧设有天线罩。
所述伺服系统控制初始寻零、寻卫星、稳定跟踪,所述初始寻零包括北斗/GPS、惯导组合系统测量出航向角及载体所在位置的经度和纬度,然后自动确定以水平面为基准的天线俯仰和极化角,所述寻卫星包括保持初始化完成后的天线俯仰和极化角不变旋转方位角,扫描卫星信号。通过载波接收机将卫星信号转换为模拟电压,再根据所采集的电压值判断出卫星信号的极大值相对于天线的位置,并结合调制解调器输出的卫星信号接收信噪比数据进行判断是否需要修正,使用修正后的数据调整天线方位角使天线自动对准卫星,所述稳定跟踪包括天线主控单元不断采集惯导和北斗/GPS数据并进行计算,得出天线理论上准确的对准卫星角度,结合调制解调器输出的卫星信号接收信噪比数据对对准卫星角度进行修正,对电机驱动器下达指令调整天线面。与此同时,载波机不断采集卫星载波信号,将其转化为AGC电压值,并将这些数据传输至主控单元,主控单元根据载波机反馈的AGC电压判断天线是否准确对准卫星,如未准确对准卫星则根据反馈的AGC电压值、载体姿态数据及电机编码器反馈的角度数据进行运算,重新调整天线面,直到使其准确对准卫星为止。
本发明的有益效果:
本发明提供一种船载动中通用天线,能够在恶劣的环境条件下天线始终对准所用的卫星,并对卫星进行连续追踪,保证信号的平稳,能够满足船体面临横摇、纵摇以及船体的转向等复合运动时实现天线与船体相适应的复合运动。
附图说明
图1为本发明一种船载动中通用天线的整体结构示意图。
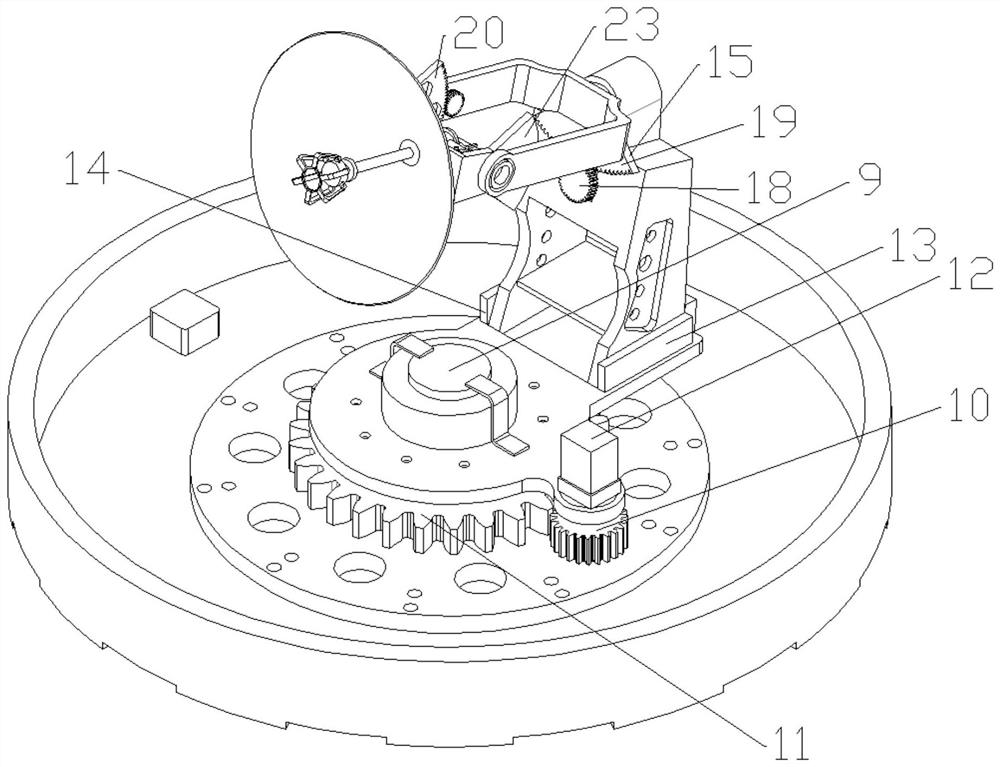
图2为本发明一种船载动中通用天线的部分结构示意图。
图3为本发明一种船载动中通用天线的部分结构另一角度示意图。
图4为本发明一种船载动中通用天线的伺服控制系统连接框图。
图5为本发明一种船载动中通用天线的控制软件流程图。
图6为本发明一种船载动中通用天线的测量系统原理图。
(1、俯仰电机,2、俯仰机构,3、横滚机构,4、方位机构,5、天线罩,6、方位底座,7、方位传动机构,8、方位转台,9、滑环,10、第一齿轮,11、第二齿轮,12、方位电机,13、交换机,14、伺服组件,15横滚转动机构,16、横滚支臂,17、俯仰支臂,18、第三齿轮,19、第四齿轮,20、俯仰传动机构,21、接收链路LNB,22、发射链路BUC,23、俯仰配重,24、第五齿轮,25、第六齿轮,26、横滚电机)
具体实施方式
下面将结合附图,对本发明的优选实施例进行详细的描述。
如图1至图6所示:本发明提供一种船载动中通用天线,其包括天线面组件、结构转台、伺服控制系统;所述结构转台承载伺服控制系统,所述结构转台由俯仰机构2、横滚机构3、方位机构4组成,所述方位机构4由方位底座6、方位传动机构7、方位转台8、滑环9组成,所述方位转台8位于方位传动机构7上方,所述横滚机构3位于方位机构4上方,所述横滚机构3由交换机13、伺服组件14、横滚转动机构15、横滚支臂16组成,所述俯仰机构2由俯仰传动机构20、俯仰配重23、俯仰支臂17组成,所述俯仰支臂17与横滚转动机构15相连接,所述天线面组件1与俯仰支臂17相连接,所述俯仰配重23、俯仰传动机构20分别位于俯仰支臂17两侧,所述伺服控制系统包括惯性传感器、伺服驱动单元、载波接收机、电机驱动器、零位开关、供电单元、主控单元、北斗/GPS定位接口,所述电机驱动器包括方位电机驱动器、俯仰电机驱动器、横滚电机驱动器,所述方位电机驱动器、俯仰电机驱动器、横滚电机驱动器分别与方位传动机构7、俯仰传动机构20、横滚转动机构15相连接,所述天线面组件包括接收链路LNB21、发射链路BUC22、惯导,所述载波接收机通过接收链路LNB接收卫星下行信号,跟踪接收卫星载波信号,所述惯导为天线本体姿态采集模块,所述伺服系统控制包括通过北斗/GPS、惯导测量出航向角及载体所在位置的经度和纬度,确定以水平面为基准的天线俯仰和极化角,通过载波接收机判断出卫星信号相对于天线的位置,方位电机驱动器、俯仰电机驱动器、横滚电机驱动器驱动方位传动机构7、俯仰传动机构20、横滚转动机构15调整天线方位角使天线自动对准卫星,所述主控单元不断采集惯导和北斗/GPS数据并进行计算,主控单元根据载波接收机反馈信号的判断天线是否准确对准卫星,如未准确对准卫星则重新调整天线面,直到使其准确对卫星为止,所述主控单元内设有动中通伺服控制系统软件。
本发明中的方位传动机构7由相啮合的第一齿轮10、第二齿轮11、方位电机12组成,所述第一齿轮10、第二齿轮11位于方位转台8与方位底座6之间,所述方位电机12位于方位转台8上,所述方位电机12与第一齿轮10相连接,所述方位电机驱动器与方位电机12相连接,所述横滚机构3、滑环9位于方位转台8上,所述滑环9为帽式滑环,所述横滚转动机构15由相啮合的第三齿轮18、第四齿轮19、横滚电机26组成,所述横滚电机26与第三齿轮18相连接,所述横滚电机驱动器与横滚电机26相连接,所述俯仰传动机构20由相啮合的第五齿轮24、第六齿轮25、俯仰电机1组成,所述俯仰电机1与第五齿轮24相连接,所述俯仰电机驱动器与俯仰电机1相连接,所述天线面组件、结构转台、伺服控制系统外侧设有天线罩5。
本发明中的伺服系统控制初始寻零、寻卫星、稳定跟踪,所述初始寻零包括北斗/GPS、惯导组合系统测量出航向角及载体所在位置的经度和纬度,然后自动确定以水平面为基准的天线俯仰和极化角,所述寻卫星包括保持初始化完成后的天线俯仰和极化角不变旋转方位角,扫描卫星信号。通过载波接收机将卫星信号转换为模拟电压,再根据所采集的电压值判断出卫星信号的极大值相对于天线的位置,并结合调制解调器输出的卫星信号接收信噪比数据进行判断是否需要修正,使用修正后的数据调整天线方位角使天线自动对准卫星,所述稳定跟踪包括天线主控单元不断采集惯导和北斗/GPS数据并进行计算,得出天线理论上准确的对准卫星角度,结合调制解调器输出的卫星信号接收信噪比数据对对准卫星角度进行修正,对电机驱动器下达指令调整天线面。与此同时,载波机不断采集卫星载波信号,将其转化为AGC电压值,并将这些数据传输至主控单元,主控单元根据载波机反馈的AGC电压判断天线是否准确对准卫星,如未准确对准卫星则根据反馈的AGC电压值、载体姿态数据及电机编码器反馈的角度数据进行运算,重新调整天线面,直到使其准确对准卫星为止。
本发明中的俯仰机构2俯仰角度5°~110,所述方位机构4旋转角度0°~360°,所述横滚机构3旋转角度-30°~+30°。
本发明中的伺服控制系统方案采用高精度惯导与方位俯仰组合扫描跟踪组合的控制方式,系统通电后,自动进行自检,当自检完成后,若北斗天线定位成功,系统就等待程跟指令,天线作为执行机构,完成实时指向。
本发明中的天线上电后自检,自检完成后,获取终端的定位信息及具备输出授时功能,基带单元向主控单元结算完成后的大地系方位俯仰角信息,主控单元通过惯性组合单元测量载体的航向、横摇、纵摇等信息,并结合调制解调器给出的卫星信号信噪比数据对本体姿态数据进行修正,解算单元通过一系列坐标转换算法,完成最终指向。
本发明中的动中通伺服控制系统软件嵌入在船载动中通天线的主控单元内运行,不需要操作系统或其它软件支持,程序利用惯导设备提供的航向、姿态信息和位置信息,并结合调制解调器输出的卫星信号接收信噪比数据,经过坐标系转换解算出天线的坐标系的方位角、俯仰角、横滚角和极化角,通过控制电机执行到相应的角度,由编码器和和霍尔传感器定位相应的位置,结合基带单元反馈信息,对惯导航向进行修正,重复上述步骤实现精准对准卫星。
本发明中的动中通控制软件主要包括指向控制模块、电机驱动控制模块、系统自检模块、数据输入采集模块、数据输出模块、数据通信模块、系统标定模块、软件升级模块。
本发明中的动中通控制软件运行流程主要包括系统初始化、系统自检、系统寻零、搜索参考卫星、搜索目标卫星、跟踪卫星等,当运行过程中需要进行切换卫星或手动控制,可直接进行功能的切换。
本发明中的天线采用T-U-O型结构,方位转轴垂直于机座,实现水平往复运动,俯仰框转轴水平于机座,实现俯仰运动。横滚轴内框转轴垂直于与外框转轴成十字对等,实现天线±25°左右摆动,卫星过顶时,在方位和俯仰角度无法保证稳定跟踪的情况下,天线通过横滚轴修正方位、俯仰的指向偏差,保证天线能够在高仰角及卫星过顶的情况下依然稳定跟踪目标卫星,卫星。
以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
- 一种船载动中通用天线
- 一种船载站动中通用天线面组件