图像处理方法及图像处理系统
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及图像处理技术领域,尤其涉及一种图像处理方法及图像处理系统。
背景技术
因受到拍照现场环境不确定的影响,获取的图像非常复杂,这将影响计算机自动提取单元格准的确率,或者可能会消耗更多的资源。
传统图像提取单字格的方法为预先设置静态参数,如相邻区域大小和常数、结构元素大小、卷积核大小和迭代次数等。在测试验证环境中,由于图像样本数量有限,可以实现较高的提取准确率,但在实际使用过程中,由于上述拍照现场环境不确定的影响,造成不同图像明显存在差异,使用预设的静态参数方法实现的提取准确率降低而且不稳定。
因此,有必要提供一种新型的图像处理方法及图像处理系统以解决现有技术中存在的上述问题。
发明内容
本发明的目的在于提供一种图像处理方法及图像处理系统,提高提取单元格的准确性。
为实现上述目的,本发明的所述图像处理方法,包括以下步骤:
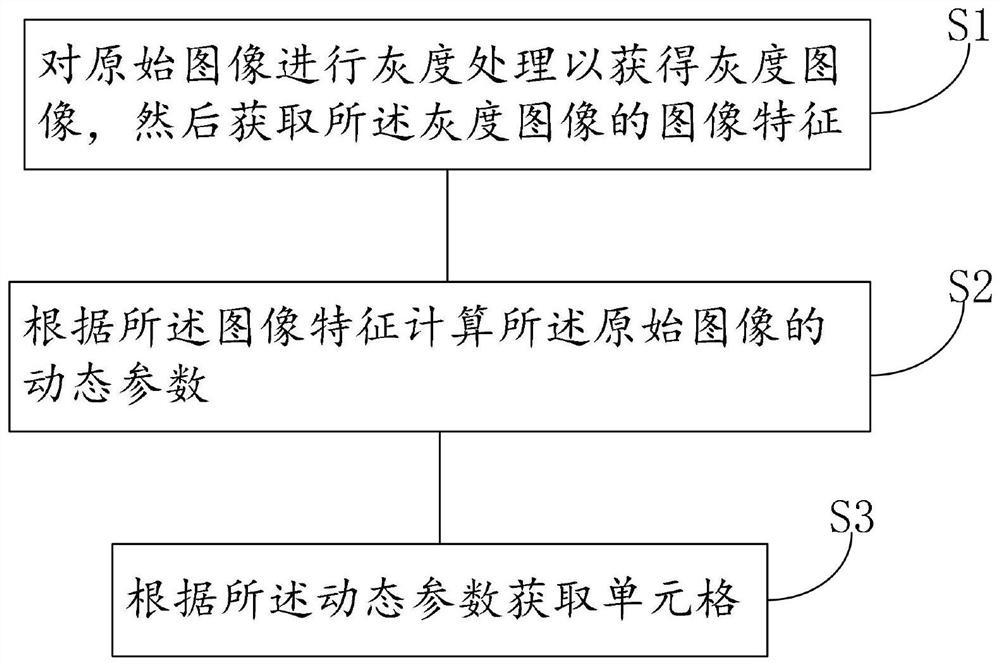
S1:对原始图像进行灰度处理以获得灰度图像,然后获取所述灰度图像的图像特征;
S2:根据所述图像特征计算所述原始图像的动态参数;
S3:根据所述动态参数获取单元格。
所述图像处理方法的有益效果在于:对原始图像进行灰度处理以获得灰度图像,然后获取所述灰度图像的图像特征,根据所述图像特征计算所述原始图像的动态参数,使得后续所需要的参数不是固定的,提高了提取单元格的准确性。
优选地,所述步骤S1还包括调节所述原始图像的宽高比以及像素大小,增加所述原始图像的锐化效果,以提高所述原始图像的清晰度。
进一步优选地,调节所述原始图像的宽高比为1:1。
进一步优选地,调节所述原始图像的像素为2000×2000。
优选地,所述步骤S1包括通过轮廓查找算法寻找所述灰度图像的最大连通域,通过所述最大连通域获取所述图像特征。
进一步优选地,所述步骤S1还包括根据所述最大连通域的四点坐标位置判断倾斜角度,然后判断所述倾斜角度是否大于10度,判断所述倾斜角度大于10度,则对单元格进行矫正。
进一步优选地,所述矫正单元格包括单元格水平矫正、单元格垂直矫正和单元格透视矫正中的至少一种。
优选地,所述步骤S3包括:
S31:根据所述动态参数对所述灰度图像进行二值化处理,以使所述灰度图像转化为呈现黑白效果的二值图像;
S32:根据所述动态参数获取所述二值图像的横线坐标和竖线坐标,进而获取横线坐标集合和竖线坐标集合;
S33:去除所述横线坐标集合和所述竖线坐标集合中的干扰坐标,获取交叉点坐标集合;
S34:根据所述交叉坐标集合确定单元格轮廓,根据所述单元格轮廓对所述原始图像进行图像分割,以提取单元格。
进一步优选地,所述步骤S31中,将所述灰度图像中大于临界灰度值的像素灰度调节为灰度极大值,将所述灰度图像中小于所述临界灰度值的像素灰度调节为灰度极小值。
进一步优选地,所述临界灰度值为5%~10%。
进一步优选地,所述步骤S32中,先根据所述动态参数获取所述二值图像的横线坐标,然后根据所述动态参数获取所述二值图像的竖线坐标。
进一步优选地,所述动态参数包括结构元素大小和迭代次数,所述步骤S32包括以下步骤:
S321:通过形态学开运算算法根据所述结构元素大小构建卷积形状和大小组合参数;
S322:根据所述迭代次数和所述卷积形状和大小组合参数对所述二值图像进行腐蚀和膨胀,以得到二值处理图像;
S323:消除所述二值处理图像中的噪音,然后在所述二值处理图像的纤细点处分离形体和平滑最大形体边界;
S324:抹除所述二值处理图像不属于横线的像素区域,然后获取所述横线坐标。
进一步优选地,所述步骤S33包括以下步骤:
S331:根据横线坐标集合和竖线坐标集合,计算相邻坐标之间的距离;
S332:以所述距离的中位数作为单元格的宽度和高度;
S333:通过距离比较算法消除相邻距离小于第一间距阈值或大于第二间距阈值的坐标,以得到所述交叉点坐标集合;
其中,所述第一间距阈值小于所述距离的中位数,所述第二距离阈值大于所述距离的中位数,且所述第一间距阈值与所述距离的中位数的差值的绝对值等于所述第二距离阈值与所述距离的中位数的差值的绝对值。
进一步优选地,所述步骤S33还包括当所述单元格缺失顶点坐标时,根据所述距离的中位数及所述顶点坐标的相邻坐标计算所述顶点坐标
本发明还提供了一种图像处理系统,所述图像处理系统包括依次连接的灰度处理模块、动态参数计算模块以及单元格提取模块,所述灰度处理模块用于对原始图像进行灰度处理以获得灰度图像,然后获取所述灰度图像的图像特征;所述动态参数计算模块用于根据所述图像特征计算所述原始图像的动态参数;所述单元格提取模块用于根据所述动态参数获取单元格。
附图说明
图1为本发明图像处理方法的流程图;
图2为本发明图像处理系统的结构框图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。除非另外定义,此处使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。本文中使用的“包括”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。
针对现有技术存在的问题,本发明的实施例提供了一种图像处理方法,参照图1,所述图像处理方法包括以下步骤:
S1:对原始图像进行灰度处理以获得灰度图像,然后获取所述灰度图像的图像特征;
S2:根据所述图像特征计算所述原始图像的动态参数;
S3:根据所述动态参数获取单元格。
本发明的一些实施例中,所述步骤S1还包括调节所述原始图像的宽高比以及像素大小,增加所述原始图像的锐化效果,以提高所述原始图像的清晰度。优选地,调节所述原始图像的宽高比为1:1,调节所述原始图像的像素为2000×2000。
本发明的一些实施例中,所述步骤S1包括通过轮廓查找算法寻找所述灰度图像的最大连通域,通过所述最大连通域获取所述图像特征。
本发明的一些实施例中,所述步骤S1还包括根据所述最大连通域的四点坐标位置判断倾斜角度,然后判断所述倾斜角度是否大于10度,判断所述倾斜角度大于10度,则对单元格进行矫正。
本发明的一些实施例中,所述矫正单元格包括单元格水平矫正、单元格垂直矫正和单元格透视矫正中的至少一种。
本发明的一些实施例中,所述步骤S3包括:
S31:根据所述动态参数对所述灰度图像进行二值化处理,以使所述灰度图像转化为呈现黑白效果的二值图像;
S32:根据所述动态参数获取所述二值图像的横线坐标和竖线坐标,进而获取横线坐标集合和竖线坐标集合;
S33:去除所述横线坐标集合和所述竖线坐标集合中的干扰坐标,获取交叉点坐标集合;
S34:根据所述交叉坐标集合确定单元格轮廓,根据所述单元格轮廓对所述原始图像进行图像分割,以提取单元格。
本发明的一些实施例中,所述步骤S31中,将所述灰度图像中大于临界灰度值的像素灰度调节为灰度极大值,将所述灰度图像中小于所述临界灰度值的像素灰度调节为灰度极小值。优选地,所述临界灰度值为5%~10%。
本发明的一些实施例中,所述二值化处理采用局部自适应阈值二值化方法,所述局部自适应阈值二值化方法中阈值为相邻区域的加权和,权重为一个高斯窗口,同时指定邻域用来计算阀值的区域大小,最后减去常数得出结果。所述二值化处理是本领域的公知技术,在此不再详细赘述。
本发明的一些实施例中,所述步骤S32中,根据所述动态参数获取所述二值图像的横线坐标,然后根据所述动态参数获取所述二值图像的竖线坐标。
本发明的一些实施例中,所述动态参数包括结构元素大小和迭代次数,所述步骤S32包括以下步骤:
S321:通过形态学开运算算法根据所述结构元素大小构建卷积形状和大小组合参数;
S322:根据所述迭代次数和所述卷积形状和大小组合参数对所述二值图像进行腐蚀和膨胀,以得到二值处理图像;
S323:消除所述二值处理图像中的噪音,然后在所述二值处理图像的纤细点处分离形体和平滑最大形体边界;
S324:抹除所述二值处理图像不属于横线的像素区域,然后获取所述横线坐标。所述竖线坐标的获取方式与所述横线坐标的获取方式原理相同,在此不再赘述。
本发明的一些实施例中,所述步骤S33包括以下步骤:
S331:根据横线坐标集合和竖线坐标集合,计算相邻坐标之间的距离;
S332:以所述距离的中位数作为单元格的宽度和高度;
S333:通过距离比较算法消除相邻距离小于第一间距阈值或大于第二间距阈值的坐标,以得到所述交叉点坐标集合;
其中,所述第一间距阈值小于所述距离的中位数,所述第二距离阈值大于所述距离的中位数,且所述第一间距阈值与所述距离的中位数的差值的绝对值等于所述第二距离阈值与所述距离的中位数的差值的绝对值。
本发明的一些实施例中,所述步骤S33还包括当所述单元格缺失顶点坐标时,根据所述距离的中位数及所述顶点坐标的相邻坐标计算所述顶点坐标。
图2为本发明一些实施例中图像处理系统的结构框图。参照图2,所述图像处理系统10包括依次连接的灰度处理模块11、动态参数计算模块12以及单元格提取模块13,所述灰度处理模块11用于对原始图像进行灰度处理以获得灰度图像,然后获取所述灰度图像的图像特征;所述动态参数计算模块12用于根据所述图像特征计算所述原始图像的动态参数;所述单元格提取模块13用于根据所述动态参数获取单元格。
虽然在上文中详细说明了本发明的实施方式,但是对于本领域的技术人员来说显而易见的是,能够对这些实施方式进行各种修改和变化。但是,应理解,这种修改和变化都属于权利要求书中所述的本发明的范围和精神之内。而且,在此说明的本发明可有其它的实施方式,并且可通过多种方式实施或实现。
- 图像处理系统、图像处理方法、以及构成图像处理系统的图像形成装置和外部装置
- 图像处理系统、外部装置以及图像处理系统的图像处理方法