一种太阳能机械臂设备
文献发布时间:2023-06-19 11:21:00
技术领域
本发明涉及太阳能组件设备技术领域,具体为一种太阳能机械臂设备。
背景技术
伴随着对自动化生产的要求越来越高,太阳能光伏行业全面引进自动化生产线,所有工位无需人工搬运,规避在生产过程中造成太阳能产品质量问题。由于在生产过程中,需要将太阳能产品进行堆叠放置,需使用机械臂进行准确定位抓取并摆放到指定位置,对抓取方式要求苛刻,目前使用吸盘方式易造成太阳能产品质量问题,且吸盘会导致痕迹留在太阳能产品表面,对太阳能产品后续清洁留下难度,需进行技术改造。
发明内容
本发明所解决的技术问题在于提供一种太阳能组件设备,以解决上述背景技术中提出的问题。
本发明所解决的技术问题采用以下技术方案来实现:
一种太阳能机械臂设备,包括滑台、伸缩槽、折弯台、控制台、夹爪、防护板及吸力装置,滑台设在一般的工作台上端,滑台下端设有伸缩槽与滑台滑动连接,伸缩槽下端设有伸缩柱与其滑动连接,伸缩柱下端固定连接折弯台,折弯台下端中间固定连接支撑柱,支撑柱两侧设有滑杆与折弯台滑动连接,支撑柱下端设有控制台,控制台前后端通过转轴与支撑柱转动连接,控制台上方前后端各设有两个连接块,连接块与折弯杆转动连接,折弯杆与滑杆转动连接,控制台内部设有夹爪滑块与控制台滑动连接,夹爪滑块下端与夹爪可拆卸连接,夹爪内侧内侧设有夹爪口,夹爪口之间通过夹爪隔板隔开,夹爪隔板前端设有夹爪防护垫,控制台前后端固定有防护板,防护板固定在转轴下端,防护板内侧控制台下端设有感应装置,防护板中间设有防护垫,防护垫上设有若干防护块,防护板下端设有防护底板,防护底板与防护板滑槽滑动连接,控制台下端中间设有吸盘连接滑柱,吸盘滑柱与控制台滑动连接,吸盘滑柱下端固定连接吸力装置,吸力装置上设有吸盘。
控制台两侧设有控制台滑槽,夹爪滑块上端固定有第一滑块,控制台上下端设有旋板,旋板上设有旋板轴,旋板轴呈内螺纹形状并与旋板转动连接,旋板内侧控制台上上端设有第二滑槽,第二滑槽上端设有第二滑块,第一滑块与第二滑块通过滑杆连接,滑杆与第一滑块及第二滑块转动连接,第二滑块前端设有旋柱,旋柱呈外螺纹结构并与旋板轴通过螺纹连接,控制台上下端设有旋柱垫,夹爪滑块前端设有夹爪旋柱,夹爪滑块内设有夹爪旋槽,夹爪滑块与夹爪滑槽滑动连接。
夹爪旋槽内设有旋柱滑槽,旋柱滑槽前端设有旋柱转轴,旋柱转轴与旋柱滑槽转动连接,旋柱转轴中间设有孔洞,旋柱转轴中间孔洞呈内螺纹结构,夹爪旋槽内部两侧设有电机架,电机架上设有夹爪电机,夹爪电机前端连接电机轮,电机轮与旋柱转轴啮合,夹爪旋柱与旋柱转轴通过螺纹连接。
夹爪最下端夹爪防护垫尺寸比其他夹爪防护垫大,夹爪防护垫为橡胶。
防护板滑槽上下端设有防护板电机,防护板电机连接防护板转轮,防护板电机前端设有防护板转轮与防护板转动连接,防护板电机上端防护板转轮与防护板电机前端防护板转轮通过连接带同步运动,防护板滑槽前端下册设有防护板滑块,防护底板与防护板滑块滑动连接,防护底板后端固定连接防护板螺旋柱,防护板螺旋柱上螺纹与防护板转轮相贴合。
折弯台内部两侧设有折弯电机,折弯电机前端设有折弯轮,折弯轮与折弯轮连接柱转动连接,折弯轮连接柱与折弯杆通过折弯转轴转动连接,折弯杆与折弯台内部折弯台定块滑动连接。
防护块内部为铁块,防护块外侧为橡胶垫。
与现有技术相比,本发明的有益效果是:
一种太阳能组件机械臂设备改装设计,提高产能、稳定性,对自动化生产线提供更为方便、快捷的生产。
撑开式抓取方式,不与太阳能产品内部接触,提高太阳能产品质量,规避正常运转时的不稳定性。
防护块外侧为橡胶垫,夹爪防护垫为橡胶,减少碰撞造成太阳能产品损坏同时橡胶摩擦力大,运送过程中不会造成太阳能产品脱落。
防护垫上设有若干防护块,防护板下端设有防护底板,防护底板与防护板滑槽滑动连接,将物品下端托起,使正常运转使太阳能产品能够稳定移动。
夹爪旋槽内设有旋柱滑槽,旋柱滑槽前端设有旋柱转轴,旋柱转轴与旋柱滑槽转动连接,旋柱转轴中间设有孔洞,旋柱转轴中间孔洞呈内螺纹结构,夹爪旋槽内部两侧设有电机架,电机架上设有夹爪电机,夹爪电机前端连接电机轮,电机轮与旋柱转轴啮合,夹爪旋柱与旋柱转轴通过螺纹连接,与旋板轴配合能够增加夹爪的夹持力度。
支撑柱两侧设有滑杆与折弯台滑动连接,支撑柱下端设有控制台,控制台前后端通过转轴与支撑柱转动连接,这样能够在使用过程中改变控制台的角度,使用方式更多,使用范围更广。
附图说明
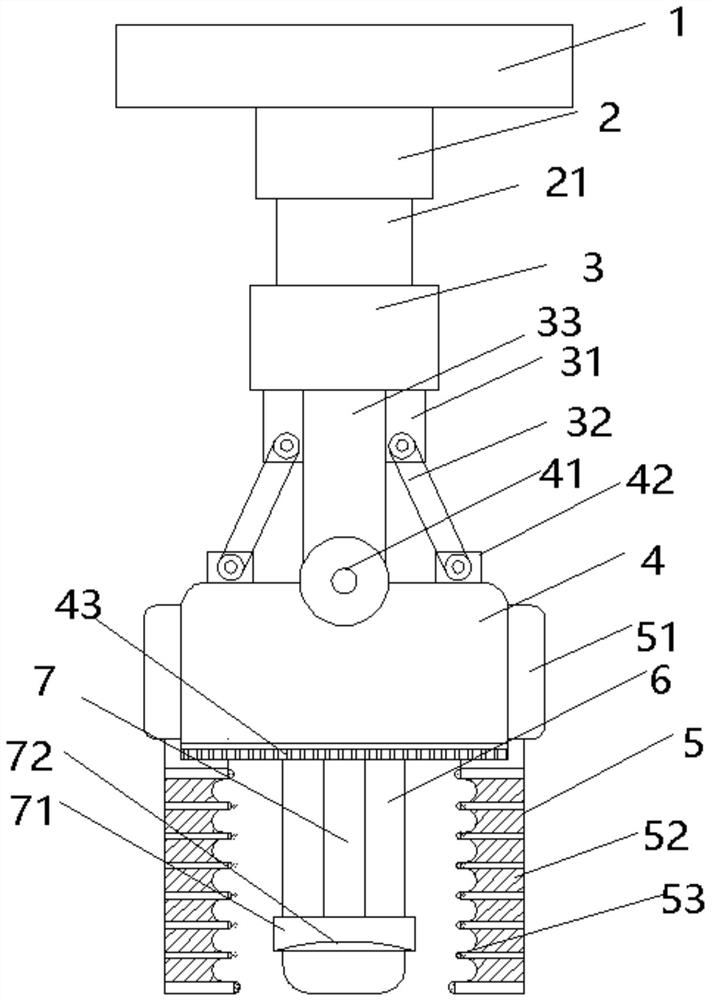
图1为本发明的主视图;
图2为本发明的控制台结构图;
图3为本发明的夹爪结构图;
图4为本发明的防护板结构图;
图5为本发明的防护底板结构图;
图6为本发明的夹爪滑槽结构图;
图7为本发明的折弯台结构图。
具体实施方式
为了使本发明的实现技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体图示,进一步阐述本发明。
如图1~7所示,
实施例1
一种太阳能机械臂设备,包括滑台1、伸缩槽2、折弯台3、控制台4、夹爪5、防护板6及吸力装置71,滑台1设在一般的工作台上端,滑台1下端设有伸缩槽2与滑台1滑动连接,伸缩槽2下端设有伸缩柱21与其滑动连接,伸缩柱21下端固定连接折弯台3,折弯台3下端中间固定连接支撑柱33,支撑柱33两侧设有滑杆31与折弯台3滑动连接,支撑柱33下端设有控制台4,控制台4前后端通过转轴41与支撑柱33转动连接,控制台4上方前后端各设有两个连接块42,连接块42与折弯杆32转动连接,折弯杆32与滑杆31转动连接,控制台4内部设有夹爪滑块51与控制台4滑动连接,夹爪滑块51下端与夹爪5可拆卸连接,夹爪5内侧内侧设有夹爪口52,夹爪口52之间通过夹爪隔板隔开,夹爪隔板前端设有夹爪防护垫53,控制台前后端固定有防护板6,防护板6固定在转轴41下端,防护板6内侧控制台4下端设有感应装置43,防护板6中间设有防护垫61,防护垫61上设有若干防护块62,防护板6下端设有防护底板64,防护底板64与防护板滑槽63滑动连接,控制台下端中间设有吸盘连接滑柱7,吸盘滑柱7与控制台4滑动连接,吸盘滑柱7下端固定连接吸力装置71,吸力装置71上设有吸盘72。
实施例2
本实施例与实施例1不同的是,如图2所示,控制台4两侧设有控制台滑槽44,夹爪滑块51上端固定有第一滑块54,控制台4上下端设有旋板58,旋板58上设有旋板轴581,旋板58内设有微型电机,微型电机控制旋板轴581转动,旋板轴581呈内螺纹形状并与旋板58转动连接,旋板58内侧控制台4上上端设有第二滑槽45,第二滑槽45上端设有第二滑块56,第一滑块54与第二滑块56通过滑杆55连接,滑杆55与第一滑块54及第二滑块56转动连接,第二滑块56前端设有旋柱57,旋柱57呈外螺纹结构并与旋板轴581通过螺纹连接,控制台4上下端设有旋柱垫40,夹爪滑块51前端设有夹爪旋柱511,夹爪滑块51内设有夹爪旋槽512,夹爪滑块51与夹爪滑槽512滑动连接。
在工作时,电机控制旋板轴581转动,旋板轴581带动旋柱57移动,旋板轴581移动带动第一滑块54与第二滑块56移动,第一滑块54与第二滑块56移动带动夹爪滑块51移动。
实施例3
本实施例与实施例2不同的是,如图6所示,夹爪旋槽512内设有旋柱滑槽522,旋柱滑槽522前端设有旋柱转轴521,旋柱转轴521与旋柱滑槽522转动连接,旋柱转轴521中间设有孔洞,旋柱转轴521中间孔洞呈内螺纹结构,夹爪旋槽512内部两侧设有电机架532,电机架532上设有夹爪电机542,夹爪电机542前端连接电机轮552,电机轮552与旋柱转轴521啮合,夹爪旋柱511与旋柱转轴521通过螺纹连接。
在电机控制旋转轴581转动从而带动夹爪滑块51移动的同时,夹爪电机542工作带动电机轮552转动,电机轮552带动旋柱转轴521转动,旋柱转轴521转动带动夹爪旋柱511移动,夹爪旋柱511带动两端夹爪滑块51靠近或者远离,与旋转轴581配合能够增加夹爪的夹持力度。
实施例4
本实施例与实施例1不同的是,如图3所示,夹爪5最下端夹爪防护垫53尺寸比其他夹爪防护垫53大,夹爪防护垫53为橡胶。
防护垫能够防止加持过程中太阳能产品受损,同时橡胶摩擦力大能够保证夹爪在运作稳定。
实施例5
本实施例与实施例1不同的是,如图5所示,防护板滑槽63上下端设有防护板电机631,防护板电机631连接防护板转轮632,防护板电机631前端设有防护板转轮632与防护板6转动连接,防护板电机631上端防护板转轮632与防护板电机前端防护板转轮632通过连接带同步运动,防护板滑槽63前端下册设有防护板滑块66,防护底板64与防护板滑块66滑动连接,防护底板64后端固定连接防护板螺旋柱641,防护板螺旋柱641上螺纹与防护板转轮631相贴合。
当防护板电机631工作的时候,防护板转轮632转动,防护板转轮632转动带动防护板螺旋柱641移动,防护板螺旋柱641带动前端防护底板64移动,从而使防护底板64与防护板滑槽63滑动连接。
实施例6
本实施例与实施例1不同的是,如图7所示,折弯台3内部两侧设有折弯电机34,折弯电机34前端设有折弯轮35,折弯轮35与折弯轮连接柱36转动连接,折弯轮连接柱36与滑杆31通过折弯转轴38转动连接,滑杆31与折弯台3内部折弯台定块37滑动连接。
当折弯电机34工作的时候,带动折弯轮35转动,折弯轮35带动折弯轮连接柱36移动,折弯轮连接柱36带动滑杆31上下滑动。
实施例7
本实施例与实施例1不同的是,防护块62内部为铁块,防护块62外侧为橡胶垫。
工作原理,当太阳能产品被移动到机械臂下端的时候,吸盘滑柱7下移,吸力装置71上吸盘72将太阳能产品吸住随后上升,感应装置43检测太阳能产品尺寸大小,随后控制夹爪滑块51对太阳能产品进行夹持,随后吸盘72停止吸附太阳能产品,随后防护板上防护底板画出垫在太阳能产品下端,防止太阳能产品在移动过程中发生脱落等现象,夹爪防护垫53与防护块62防护太阳能产品的安全,防止在移动货车堆放的过程中受损,伸缩槽2控制伸缩柱21上移带动整个机械上移,随后移台1控制伸缩槽2移动,当需要将太阳能产品转动一定角度的时候,控制滑杆31上下移动来转动整个控制台的角度。
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明的要求保护范围由所附的权利要求书及其等效物界定。
- 一种太阳能机械臂设备
- 手术机械臂的控制方法、计算机设备及一种手术机械臂