扫描速度动态变化的SEM引导的AFM形貌扫描方法
文献发布时间:2023-06-19 11:21:00
背景技术
扫描电子显微镜(Scanning electron microscopy,简称SEM)和扫描探针显微镜(scanning probe microscopy,简称SPM)是用于纳米和亚纳米成像的平台。SPM,例如原子力显微镜(atomic force microscopy,简称AFM),使用尖锐的悬臂梁尖端通过闭环位置和力控制扫描样品表面,以获取样品的3D形貌。与SPM不同,SEM通过聚焦电子束扫描样品表面从而生成样品图像。电子与样品中的原子相互作用,产生包含有关样品表面形貌(主要是二维)和成分信息的信号。
基于不同的物理成像原理,SPM和SEM代表两种互补的成像技术。由于它们通常是大型的,不兼容的仪器,因此通常通过SEM和SPM分别对样品进行成像,并且图像相互关联以获取更多的样品综合信息。但是,在SPM和SEM仪器之间来回传输样本并在样本上重新定位相同的感兴趣区域(region of interest,简称ROI)是一项艰巨而富有挑战的任务。美国专利US 5081353、US5229607、US5256876和U.Mickel,(IEEE ICRA,第4088-4093页,2010)(即混合式SEM-SPM系统)公开了一种可以通过在SEM的真空腔室内安装一个小型SPM从而解决上述问题。这种混合方法提供了在独立系统中无法实现的强大功能(例如,原位扫描探针扫描电镜互补成像,原位纳米压痕,测量过程中的SPM尖端监测,以及视觉引导的纳米操作)。
在SEM可以达到20Hz的高帧频的同时,SPM通常需要几分钟才能生成图像。SPM成像的低带宽本质上受SPM悬臂梁和压电扫描仪的机械响应限制。因此,在SEM-SPM混合成像中,SPM成像效率低是一个瓶颈。简单地设置一个高的SPM扫描速度会牺牲成像精度并潜在损坏SPM悬臂梁尖端。在SPM扫描过程中,样品的表面形貌变化会导致尖端样品距离发生变化。SPM控制器需要一定的稳定时间才能达到稳定状态。当XY压电扫描器以较高的速度移动时,SPM控制器无法使样品上的每个采样点达到稳定状态。例如,在样品的陡峭下降边缘,SPM尖端可能会完全失去对样品形貌的跟踪(也称为跳伞),从而导致样品信息的丢失以及形貌成像误差大。在样品的陡峭上升边缘,SPM尖端可能会撞上样品,导致SPM尖端和样品损坏。因此,在SPM扫描速度和成像精度之间存在权衡。
在实践中,样本在某些区域中包含形貌特征,而在其它许多区域中则具有最小或没有形貌特征。因此,不需要使用恒定的速度来扫描包含特征的区域和没有特征的区域。为了提高扫描效率,目前已经提出了几种策略。如美国专利US5204531和J.-W.Wuel(IEEETrans.纳米技术14,pp.810-819,2015)公开了一种执行快速AFM粗略扫描的方法,用以识别包含特征的区域,然后对包含特征的区域进行慢速AFM扫描以获取高分辨率的图像。同样,在美国专利中也公开了双向扫描,如美国专利US9645169和Y.Wetal(IEEE3M-NANO,第171-176页,2014年),其中采用了快速的AFM正向扫描来引导缓慢的AFM反向扫描。X.Ren等(IEEE3M-NANO,第245-250页,2015年)对ROI进行了高速完整的AFM扫描,以获取近似的形貌信息,然后以不同的扫描速度对同一个ROI进行再次扫描,从而在特征丰富的区域收集更多的细节信息。上述方法都有一个共同的特点,就是先快速扫描获取初步的形貌信息,再通过慢扫描获取精细的细节信息。由于SPM扫描的连续性质,这些技术不能显著减少扫描时间。而使用快速扫描来获得初步的形貌信息也有由于样本碰撞而损坏SPM尖端的风险。
由于在光学显微镜上安装了许多在环境中运行的SPM系统,因此可以通过光学显微镜成像只能获得有限的样品形貌信息。在美国专利US7430898、US5426302和C.-L.陈等(IEEE/ASME Trans.机电一体化20,pp.226-236,2015),在光学显微镜成像的视觉指导下,操作人员手动识别并选择包含形貌特征的区域,然后AFM会以高分辨率扫描所选区域,同时跳过所有其他区域。美国专利US9366693中描述了一种类似的技术,但通过AFM扫描整个视野,并在手动选择的区域收集了更多数据点以捕获更精细的形貌,而光学显微成像的低分辨率限制了这些方法的有效性。
目前所需要的方法是利用高速纳米尺度成像来识别样本上的形貌特征,并利用形貌信息来改变样品在不同区域的SPM(或AFM)的扫描速度。本发明公开了一种方法,该方法使用SEM的高速,高分辨率成像能力来识别形貌特征,并使用形貌信息来指导SPM的扫描速度。
发明内容
原子力显微镜(Atomic force microscop,简称AFM)是一种本质上较慢的成像技术,它利用力感敏锐的探针以恒定的速度光栅扫描样品表面,以获得三维形貌信息。在实践中,样本在某些区域中包含形貌特征,而在其它许多区域中则具有最小或没有形貌特征,利用匀速同时扫描包含特征区域和缺少特征区域的效率非常低。而要提高AFM扫描效率,需要:(1)采用高分辨率,高速方法确定样品表面的近似形貌;(2)利用形貌特征引导AFM的扫描速度以提高成像效率。
在本发明的一个实施例中,提供了一种利用SEM的高速、高分辨率成像能力来识别形貌特征,并使用形貌信息来引导AFM的扫描速度。所述步骤包括:(1)利用图像处理算法生成特征度量图,所述图像处理算法用于从SEM图像中识别和定位形貌特征;(2)将所述特征度量图转换为AFM扫描速度图;(3)基于AFM扫描速度图为每个采样点设置扫描速度,对样品上具有最小形貌特征的位置使用高扫描速度,对样品上具有丰富形貌特征的位置使用低扫描速度。
附图说明
为了使本发明的内容更容易被清楚的理解,下面根据本发明的具体实施例并结合附图,对本发明作进一步详细的说明,其中
图1是本发明SEM引导AFM的系统设计图;
图2是本发明显示了安装在SEM腔室内的AFM载体的详细配置示意图;
图3是本发明生成特征度量图并将其转换为扫描速度图的方法流程图;
图4是展示了在图3的第一步中通过使用四种算法生成的特征度量图;
图5是本发明AFM扫描中的跳伞现象;
图6是本发明SEM图像和从SEM图像中提取的特征度量图;
图7是从图6所示的特征度量图转换而来的AFM扫描速度图;
图8是图7经过平滑处理后的AFM扫描速度图。
具体实施方式
AFM提供了精确的三维形貌扫描,但是该技术的连续扫描性质限制了其成像速度。SEM采用纳米级分辨率进行实时执行二维成像(例如每秒10帧),但缺乏准确的深度感测能力。将两种显微镜方法结合在一起可以提供高效的三维形貌成像。
本发明的实施例通过提供一种从SEM图像中提取的信息来提高AFM扫描效率的方法来解决该问题。
SEM通过用聚焦的电子束扫描表面来产生样品图像。电子与样品中的原子相互作用,产生各种信号,其中一个是次级电子(SE)。在光栅扫描模式下扫描电子束,并由SE检测器在每个束的位置收集SE的数量,以确定每个像素的SEM图像亮度。由SE形成的SEM图像提供了有关样品形貌的定性信息。例如,由于SE检测器更容易收集SE,因此正对SE检测器的表面会显得更亮。因为在边缘处也生成更多的SE,因此物体的边缘也会显示得更亮。根据SEM图像的这些属性,可以从SEM图像中提取有关样本的近似形貌信息。
AFM通过使用力感探针扫描样品表面以确定3D形貌等属性来形成图像。受AFM压电扫描仪和AFM悬臂梁的机械共振频率的限制,AFM的扫描速度通常为每秒1行。具有256条线扫描的AFM图像可能需要约4分钟才能完成。更快的扫描速度降低了成像的准确性,并增加了在快速扫描过程中与样品碰撞而损坏悬臂梁尖端的风险。
本发明描述了通过图像处理从SEM的SE图像中提取形貌特征的方法,并利用该特征动态地改变了AFM的扫描速度,以达到更高的AFM扫描速度而扫描精度降低很小或不降低的目的。在识别出的形貌变化较快的区域,将AFM扫描速度适当地设置为较低的值,以避免AFM悬臂梁尖端与样品相撞,并收集更多的测量数据以便于捕捉细节。在识别出的形貌变化最小的区域(例如平坦的表面)中,将AFM扫描速度适当地设置为较高的值以减少整个图像扫描时间。与现有使用光学成像或SPM成像以获取近似/初步形貌信息的方法不同,SEM实时成像(10-15帧/秒)明显具有更高的成像分辨率(纳米),极大缩短了获取样品近似形貌信息所需的时间。
系统设置
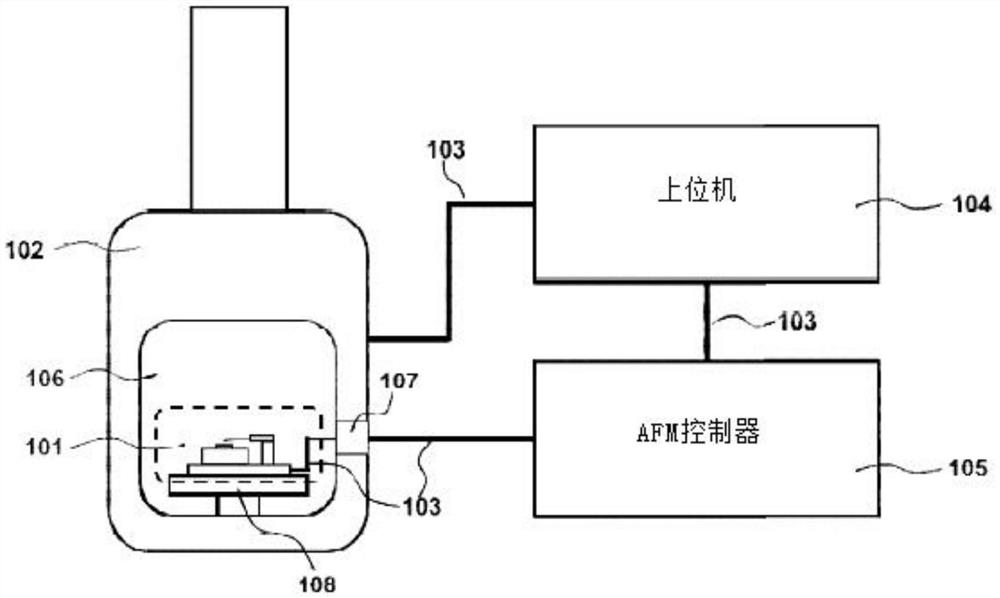
在本发明的一个实施例中,与SEM兼容的AFM系统由四个主要部件组成(图1)。将AFM载具101安装在位于SEM102的腔室106内的SEM样品台108上。SEM 102生成样本的SEM图像,并且该图像通过传输介质103传输到上位机104;上位机104通过算法对提取的SEM图像进行处理(请参见下面的方法部分)以提取样本的形貌信息并生成特征度量图;然后将所述特征度量图转换为AFM扫描速度图(请参见下面的方法部分)。穿通连接法兰107允许传输介质103通过SEM腔室106的壁,将AFM控制器105和AFM载具101连接在一起。AFM控制器105将控制信号发送到位于SEM102上的AFM载具101上,以控制基于存储在AFM控制器105中的扫描速度图在样本上每个点的扫描速度。
将AFM载具101放置在SEM 102的腔室106内。图2展示了AFM载具101的详细信息。XY粗载物台201安装在底板202上,以将AFM悬臂梁203尖端对准样品208用于提供粗略的位置。X精细扫描仪204和Y精细扫描仪205通常由压电陶瓷材料制成,放置在XY粗载台201的顶部,以提供高速(高达kHz)XY光栅扫描。将AFM悬臂梁203安装在Z扫描仪206上,并放置在AFM样品台207上方。
AFM控制器105配置为驱动X精细扫描仪204、Y精细扫描仪205、Z扫描仪206和XY粗载台201。扫描波发生器使用存储在控制器内存中的速度图来产生扫描器驱动信号。
方法
图3说明了本发明的主要步骤。本发明包括两个主要步骤:(301)从样品的SEM图像中提取形貌特征以生成特征度量图;(302)使用所述特征度量图生成AFM扫描速度图,并根据AFM扫描速度图执行AFM扫描。
步骤1:生成特征度量图;
第一步主要目的是生成样本的特征度量图。所述特征度量图定量地显示了那些包含形貌特征的样本上的区域。详细步骤包括收集SEM图像3011;使用算法提取形貌特征3012;对形貌特征进行归一化3013;比较不同算法的归一化结果并确定最佳特征度量图3014。
在第一步3011中,操作员从实时捕获的SEM图像中选择感兴趣的区域(ROI)。然后将ROI图像发送到上位机,以量化在SEM图像内的形貌特征量。在3012的步骤中,使用SEM的次级电子(SE)成像模式,因为它与其他成像模式例如背散射电子(BSE)和阴极发光(CL)相比,可以提供最佳的样品形貌表征。在SE成像模式下,每个像素的灰度级由聚焦电子束与样品表面相互作用时生成的SE数量确定。产生的SE数量越多,在SEM图像中对应的像素越亮。在平坦的表面上,检测器采集到的SE量是一致的,由此导致SEM图像中出现一个均匀的灰度级区域。在特征的边缘,从样本表面收集的SE越多,则特征的轮廓越鲜明。
利用SEM图像的这些属性,可以快速更改灰度图像像素,从而在SEM图像中快速显示形貌特征。本发明使用算法(见下文)来快速检测变化的灰度像素以识别SEM图像内的形貌特征,并生成定量的特征度量图。度量的值与SEM图像中的局部信息量相关。度量标准应该能够定量描述SEM图像中的局部特征量,并区分包含特征的区域和缺乏特征的区域。在此实施例中,描述了四种不同的算法,这些算法在识别SEM图像中快速更改灰度级别时被发现是有效的。在本发明的范围内,还发现了以下示例算法以外的其他算法的使用,这些算法可能会产生类似的结果效果。
在本发明的一个实施例中,使用四种不同的算法来识别SEM图像迅速改变灰度级别,如下图所示:
1)局部熵(Local entropy)量化了图像中局部区域的统计直方图均匀性。与平坦区域相比,样本表面的边缘具有更亮的特征,从而导致邻域的不均匀性(C.Yan等人,图案识别字母,第24卷,pp.2935-2941,2003);
2)局部标准差(STD)表示局部区域中像素值变化的统计程度。SEM图像中的边缘特征往往比区域(D.-C.Chang et al.,IEEE Trans.医学影像,Vol.17页.518-531,1998)表现出更高的变异性;
3)局部灰度范围(RofGL)是一个邻域中最大灰度与最小灰度之间的差值。对于SEM图像中的一个边缘和一个区域,RofGL显示邻域内像素值范围内的变化(R.Gonzalez等人,《数字图像处理》,第4章.9,Pearson/Prentice Hall,2006);
4)局部梯度(MofG)评估图像邻域中的坡度。样品表面特征边缘越陡,在SEM图像中的斜率就越大。其他算法也可以使用(W.Xue等,IEEE Trans.图像处理,卷23页.4850-4862,2014)。
从步骤3012提取的功能度量图归一化为介于0到1(3013)之间的范围。归一化可以直接比较不同算法生成的特征度量图。为了量化每个算法从而区分样本上具有形貌和没有形貌特征的区域,将差分指数(DI)定义为:DI=M
在本实施例中,四种算法在不同的SEM成像条件下(图像放大倍率、电子束能量、光斑尺寸和样品材料性质)各有不同的优势。为了确定一个特定样本使用的最合适的算法,系统自动计算每个特征度量图的DI值并对它们进行比较(3014)。
在本实施例中,使用了一个具有快速高度变化的样本来比较由四个不同算法生成的特征度量图。图4显示了四个特征度量图的结果,其中401是包含特征的区域,而402是缺少特征的区域。在此特定示例中,从它们的最高DI值可以看出,MofG提供了最佳结果。
步骤2:将所述特征度量图转换为AFM扫描速度图
接下来的关键步骤是通过映射函数将所述特征度量图转换为AFM扫描速度图。扫描速度图是用于在每个采样点设置AFM扫描速度和扫描路径的详细说明。映射原则是在所述特征度量值较低的缺乏特征区域中设置较高的扫描速度,并在特征度量值较高的丰富特征区域设置较低的扫描速度。
在一个实施例中,首先使用伽玛函数转换归一化的特征度量图:v∝mγ,γ≥0,其中m为每个采样位置的特征度量值,而v为相应位置的AFM扫描速度,γ是为了实现AFM扫描速度和精度之间的权衡。对于没有很多特征的区域,较高的伽玛值可以提高局部扫描速度,从而节省总扫描时间。相比之下,对于特征丰富且特征形貌快速变化的区域,降低的伽玛值会使AFM扫描速度变慢,从而导致精细的扫描速度。当伽玛为零时,整个扫描速度图上的值将变为恒定数(即所有采样点上的扫描速度为常数),而SEM引导的AFM扫描方法又回溯到传统的慢栅格扫描。
由于SEM图像中的噪声,计算出的速度图可以命令AFM扫描仪执行快速的速度变化。这可能很难在实践中实现,因为它需要较高的机械带宽和引入不必要的振动。因此,所述AFM扫描速度图被滤波用以提供平稳的速度转换。在AFM扫描速度图中应用了低通滤波和高斯滤波等平滑方法。
步骤3:将AFM扫描速度图发送到AFM控制器
将滤波后的AFM扫描速度图发送到AFM控制器。具体地,用于引导AFM扫描的平滑的速度图从上位机104通过传输介质103发送到AFM控制器105。所述速度图包含X精细扫描仪204和Y精细扫描仪205在样本上的每个点上运动速度的详细信息。XY扫描波发生器根据扫描速度图动态调整样本上每个采样点的扫描速度。在样本的缺少特征/平坦区域中,所述速度图指示AFM以更高的速度进行扫描以节省时间。当AFM接近一个形貌快速变化的特征时,所述速度图会指示AFM降低扫描速率以捕获精细的形貌细节。
结论
本发明的性能可以根据在固定的扫描时间内达到的AFM扫描精度来判断。AFM成像中的主要测量失真是由称为跳伞的现象造成的。在AFM扫描过程中,对AFM悬臂梁尖端进行闭环控制,以保持尖端与样品表面之间具有一定的距离或作用力。在高扫描速度下,悬臂梁高度调整无法跟上形貌的变化,从而导致测量误差。
图5显示了用来量化AFM成像精度的跳伞距离。采用单线扫描在陡坡边缘上的跳伞距离501来确定扫描精度。跳伞距离501越大,AFM扫描精度越差。对于整个AFM图像,可以通过平均发生跳伞现象的所有扫描线来获得平均跳伞距离。平均期间不包括没有跳伞的扫描线。降低跳伞距离可以通过降低扫描速度从而来增加总扫描时间。传统的AFM扫描利用恒定的扫描速度,因此,为减少跳伞距离,必须降低恒定扫描速度。相比之下,本发明识别具有形貌特征的区域,并动态确定适合图像中每个像素的扫描速度。
在此实施例中,使用了来自布鲁克纳诺公司的标准AFM校准芯片VGRPUM来证明本发明中描述的方法,以及其对AFM扫描性能的影响。该芯片包含在晶圆上制造重复的正方形腔(宽度为5m,腔体深度为180nm)。
图6为芯片样品的SEM图像和从SEM图像中提取的归一化特征度量图。图7显示了由特征度量图转换而来的扫描速度图。图8显示了平滑后的速度图。
图6为从校准芯片上一个正方形腔的SEM图像提取的特征度量图。根据特征度量图,经过归一化后,平坦区域(空腔底部或芯片表面)的值约为0,即该区域包含的形貌特征最小。相反,快速变化的区域,比如正方形的边缘,其值接近于1。
从图7可以看出,平坦区域的速度接近AFM扫描的最大速度,而正方形边缘的速度接近AFM扫描的最小速度。这样可以在扫描平坦区域时节省时间,并在形貌变化较快的地区最大限度地提高扫描精度(最小跳伞量)。在本实验中,包含特征区域的最小扫描速度为2m/sec,平坦区域的最大扫描速度为8m/sec。
图8可以消除因噪声引起的快速扫描速度变化。在本实施例中,使用了低通滤波。本领域技术人员可以理解,也可以使用其他平滑方法来消除快速的速度变化。
为了将本发明所公开的方法与传统的AFM扫描方法的性能进行比较,进行了以下实验。所使用的样品为相同的AFM校准芯片,该芯片含有重复的正方形图案。在第一个实验中,在固定的2分钟扫描时间下,比较了本发明与传统AFM扫描的扫描精度。实验结果表明,本发明的方法比传统AFM扫描方法减少了44%的跳伞距离,证明了该方法对提高扫描精度的有效性。在第二次实验中,使用相同的样本,结果表明,为了达到相似的扫描精度水平,本发明比传统的AFM扫描方法节省了58%的时间。
- 扫描速度动态变化的SEM引导的AFM形貌扫描方法
- 应用于AFM-SEM混合显微镜系统的PRC及其制造方法