修复系统以及修复方法
文献发布时间:2023-06-19 11:21:00
【技术领域】
本发明涉及一种用于将粘合剂涂敷到容器中的水下待修复位置的修复系统。进一步地,本发明涉及一种在容器中水下执行的修复方法。
【背景技术】
在填充有水和/或其它介质的容器中,比如像核电站的(废)燃料池的贮液器中,泄漏可能在由于腐蚀而产生的某些腐蚀位置处发生,必须修复这些位置。另外,相应容器的壁的厚度可能由于腐蚀而减小,使得也需要修复这种腐蚀位置,以便满足某些要求,尤其是用于操作容器和/或容器所分配到的系统的要求,比如用于操作核电站的要求。
为了修复这种位置,可以将容器清空,以便确保接近分配给腐蚀位置的相应区域,以修复腐蚀位置。然而,清空容器是非常昂贵的,尤其是取决于容器的内容物。另外,需要可以用于容纳被清空容器的内容物的另一个容器。
在由核电站的燃料池建立的容器的情况下,腐蚀位置必须在水下修复,因为燃料池的内容物可能被污染,使得内容物,特别是水或更确切地说是介质,不能从容器去除。由此,腐蚀位置必须在水下修复。
迄今为止,可从相应容器的开口接近的区域通过使用包括粘合剂(和修复垫或修复覆盖物)的修复系统来修复。修复系统经由通常分配到容器顶部的开口插入到容器中。由此,腐蚀位置可以在容器的侧面处和在底壁的某些区域中修复,因为从容器顶部插入的修复系统可以到达这些位置。比如,WO2015/011270A1和DE3913202A1示出了用于修复容器侧面的腐蚀位置的这种修复系统。
然而,腐蚀位置也可能出现在不能从容器的顶部接近的容器的区域中,诸如分配到燃料元件的架(也称为燃料架)的区域,比如在燃料元件的架下方的容器的底部处。因此,通过涂敷粘合剂来修复腐蚀位置的方案受限于从容器顶部的可接近性。因此,迄今为止,必须使用用于修复那些位置的不同方案,这些方案在成本效益方面较低且在可用性方面较复杂。
【发明内容】
本发明的目的是提供一种容易且有成本效益的方式来修复容器中的待修复位置,而不管该位置所处的区域如何。
本发明尤其提供了一种用于将粘合剂涂敷到容器中的水下待修复位置的修复系统,该修复系统包括被配置为在水下驱动的可移动的遥控修复机器人。该修复机器人包括被配置为与粘合剂涂敷模块联接的修复模块。粘合剂涂敷模块被配置为将粘合剂分配在待修复位置上。
进一步地,本发明尤其提供了一种在容器中水下执行的修复方法,该方法具有以下步骤:
-将可移动的遥控修复机器人在水下驱动到容器内的待修复位置;以及
-在水下待修复位置上涂敷粘合剂。
本发明基于修复系统和修复方法,其中通过使用可移动的遥控修复机器人,将粘合剂涂敷到水下待修复位置,比如腐蚀位置。相应的修复机器人可以被驱动到相应的区域,使得粘合剂可以被涂敷在相应的位置处。使用可移动的遥控修复机器人确保所用的粘合剂可以涂敷到容器内的所有位置。由此,与在将粘合剂涂敷到待修复位置之前使用的常规修复系统相比,修复不再限于容器的某些区域。而且,如果相应的待修复位置被分配到不能从容器的顶部接近的区域,则也不必清空容器以修复该位置。实际上,可移动的遥控修复机器人被驱动到水下的相应区域,使得可以接近容器内的所有位置。
通常,待修复位置可以对应于腐蚀位置、具有比如由物体和/或诸如机械应力和/或热应力的应力引起的机械损坏的位置。进一步地,待修复位置可以涉及具有减小的壁厚的位置。另选地或另外地,泄漏可能发生在介质泄漏到地下可能经由的相应位置处。
此外,修复可以是预防性的,以便避免即将到来的损坏,比如可能导致泄漏的腐蚀损坏。
由此,待修复位置可以涉及无腐蚀或具有任何种类的损坏的位置。然而,待修复位置可能被识别为易于损坏,使得其应当以预防性的方式修复。
因此,修复系统可以用于避免将来的损坏。由此,修复系统通常也对应于预防性修复系统。
可移动的遥控修复模块是在容器中水下驱动的修复机器人的一部分。实际上,修复模块对应于修复机器人的主模块。
因此,可移动的遥控修复机器人至少被分配给驱动器,特别是电动机。驱动器可以集成在可移动的遥控修复机器人内,比如集成在修复模块中。
可移动的遥控修复机器人也可称为可移动的遥控修复爬行器,更确切地说是可移动的遥控修复机械手。
修复系统和修复方法通常可以用于水下(废)燃料池中,即酸性介质中,比如包含硼酸的介质中。
粘合剂可以由自流平粘合剂(a self-leveling adhesive)建立,该自流平粘合剂经由粘合剂涂敷模块容易地涂敷在待修复位置上。比如,粘合剂是聚合物粘合剂,特别是环氧树脂粘合剂。粘合剂本身可以是抗辐射的。而且,粘合剂可以是在涂敷之前混合的双组分粘合剂。
根据一个方面,修复模块被配置为与清洁模块联接,特别地,其中,清洁模块被配置为与过滤器和/或抽吸构件联接。由此,通过适当地使用清洁模块,可以清洁待修复位置。相应的待修复位置在涂敷粘合剂之前清洁,使得确保良好的粘合性能。
抽吸构件被配置为吸取在清洁期间出现的材料。
过滤器可以分配给抽吸构件,使得被吸取的材料被适当地过滤。在过滤器中,材料被聚集,使得其可以容易地被清空。
过滤器也可以在清洁过程期间放置在容器内。
修复模块通常以模块化方式配置,使得不同的模块可以与修复模块连接,比如粘合剂涂敷模块和/或清洁模块。
因此,相应的修复机器人可以包括两个或更多个模块,比如修复模块以及粘合剂涂敷模块或清洁模块。
比如,清洁模块包括至少一个清洁刷单元,特别地其中,清洁刷单元具有三个刷,每个刷以基本上圆形的方式形成。清洁刷单元确保通过刷擦清洁相应的位置。沉积物和/或残留物可以从待修复位置刷掉,使得清洁相应的位置。
清洁刷单元的三个刷可以被驱动为使得它们旋转,以便清洁相应的位置。不同的刷可以比如根据修复系统的特定清洁模式单独地和/或共同地控制。
另外,清洁刷单元可以分配给抽吸构件。抽吸构件被配置为吸取由清洁刷单元的刷掉除的材料。
根据另一方面,粘合剂涂敷模块包括涂敷刷,特别地其中,涂敷刷以圆形方式形成。由此,要涂敷在待修复位置上的粘合剂被刷到相应的位置上,使得粘合剂分布在待修复位置上,特别是以均匀的方式分布。
粘合剂可以通过使修复机器人前后移动比如5至100cm/min来涂敷,同时粘合剂被涂敷为使得涂敷刷分布粘合剂。
比如,粘合剂经由喷嘴,比如传统的喷嘴来涂敷。
而且,在涂敷粘合剂期间,涂敷刷可以旋转比如每分钟1至300转,使得刷入粘合剂。
另选地,刷在粘合剂涂敷期间不旋转。
根据涂敷刷的形状,所涂敷的粘合剂可具有100至200mm的宽度。涂敷在待修复位置上的粘合剂的厚度可以在0.5至10mm之间变化。
通常,通过使用(旋转)涂敷刷来涂敷粘合剂确保了将待修复位置周围的介质(比如酸性介质,诸如包括硼酸的水)推开(位移),使得待修复位置裸露。因此,粘合剂可以直接涂敷到待修复位置。这改进了水下的粘合剂涂敷。
另外,涂敷刷也可以用于清洁目的,使得粘合剂涂敷模块也可以与清洁模块相对应。比如,涂敷刷为了清洁目的而旋转,而不分配任何粘合剂,使得涂敷刷对应于清洁刷,因为没有分配可被刷入的粘合剂。
而且,粘合剂涂敷模块可以具有用于将粘合剂分配在待修复位置上的出口,其中,出口被分配给涂敷刷,特别地其中,涂敷刷以同心方式围绕出口设置。待修复位置周围的介质通过(旋转的)涂敷刷推开,使得粘合剂可以被涂敷在由涂敷刷挖出的区域中。
另一方面提供了设置粘合剂供应模块,该粘合剂供应模块与粘合剂涂敷模块流体联接,使得粘合剂经由粘合剂供应模块供应到粘合剂涂敷模块。粘合剂供应模块可以是修复机器人的一部分,其中,粘合剂供应模块可以对应于修复机器人与提供要涂敷的粘合剂的单独形成的机器的接口。因此,粘合剂经由粘合剂供应模块供应到粘合剂涂敷模块。
比如,粘合剂供应模块经由软管、导管、管道、管线或任何其它合适的构件中的至少一个连接到相应的机器,以便将粘合剂从机器供应到修复机器人,特别是粘合剂涂敷模块。
粘合剂供应模块可以连接到可移动的遥控修复机器人,比如可移动的遥控修复模块或连接到可移动的遥控修复模块的另一模块。
而且,修复模块可以被配置为与位置查找模块和/或泄漏确定模块联接,特别是与交流电场测量模块(ACFM模块)和/或真空箱模块联接。ACFM模块确保腐蚀位置可以容易地定位。因此,腐蚀位置查找模块可以用于定位关于泄漏和/或壁厚低于所需是关键的点。比如,ACFM技术用于定位这些关键点。通过使用泄漏确定模块,可以验证是否提供泄漏,因为可以比如通过使用真空箱模块来适当地确定相应的泄漏量。
比如,修复模块被配置为与包括至少一个轮的至少一个驱动模块联接,该至少一个轮比如为麦克纳姆(Mecanum)轮、全向轮或聚氨酯轮(poly wheel),特别地其中,修复模块包括被配置为各自与对应的驱动模块联接的两个驱动接口。因此,通过与修复模块联接的至少一个驱动模块来确保修复机器人的可移动性。
相应的轮,特别是麦克纳姆轮、全向轮或聚氨酯轮,确保了修复机器人可以在任何方向上移动。而且,修复机器人被配置为通过适当地控制轮来容易地改变其方向。
通常,修复模块可以与被分配给两个相对侧的两个驱动模块联接,其中,各个驱动模块包括两个轮,比如两个麦克纳姆轮,使得可移动的遥控修复机器人具有四个轮,比如四个麦克纳姆轮。
另外,可以设置至少一个相机模块,特别地其中,相机模块被分配给至少一个驱动模块。相机模块确保使得修复系统的用户能够在考虑由相机模块提供的图片的同时遥控修复机器人。因此,使得用户能够观察水下修复机器人的环境,特别是探测可能具有腐蚀位置的点,以便调查这些位置。因此,用户可以适当地控制修复机器人,使得其被驱动到被识别为潜在的关键点的点。
另一方面提供:修复模块具有功能接口,该功能接口被配置为与粘合剂涂敷模块和清洁模块选择性地联接。由此,设置了单个功能接口,该功能接口可根据修复系统的期望用途或更确切地说根据修复系统的操作模式而与不同模块(即粘合剂涂敷模块和清洁模块)联接。
因此,根据修复系统的操作模式,修复机器人可以包括修复模块、至少一个驱动模块以及粘合剂涂敷模块或清洁模块。
如前所述,可以在粘合剂涂敷之前清洁待修复位置,使得修复模块可以与清洁模块联接,以便预先清洁相应的待修复位置。然后,可以将清洁模块与修复模块分离,修复模块然后与粘合剂涂敷模块联接。同一功能接口用于联接各个模块。另选地,粘合剂涂敷模块的涂敷刷也可以用于清洁目的,使得粘合剂涂敷模块也是清洁模块。换言之,具有粘合剂涂敷模块的修复机器人可以以两种不同的模式操作,即清洁模式和粘合剂涂敷模式。
一般而言,可移动的遥控修复机器人可以模块化地配置。如上所述,修复机器人对应于在水下驱动的系统的单元,其中,修复机器人与位于容器附近(比如在池边缘或反应堆底板处)的修复系统的其它部件连接。修复机器人包括中心修复模块,该中心修复模块提供用于连接另外模块的相应接口,使得修复机器人以模块化方式建立。因此,不同的模块可以连接到修复模块,这确保了修复机器人的不同功能。
通常,系统,特别是修复机器人,可以另外包括清洁模块、腐蚀位置查找模块、泄漏确定模块、至少一个驱动模块、至少一个相机模块、悬挂模块和/或粘合剂供应模块,特别地其中,系统还包括控制单元和/或粘合剂混合机。
该系统,特别是修复机器人,还可以包括粘合剂涂敷模块。
修复模块通常以模块化方式配置,使得不同的模块可以同时和/或随后与修复模块连接。如上所述,修复模块对应于修复机器人的主模块以及修复系统。因此,由于不同的模块可以彼此连接以便提供修复机器人的期望功能,所以提供了紧凑的修复系统。
比如,悬挂模块以及粘合剂供应模块可以由单个功能单元,即悬挂和供应单元建立,使得悬挂以及粘合剂供应由单个单元确保,因为同时需要两种功能。
由于修复机器人被配置为以遥控方式在水下驱动,所以至少单独形成的控制单元用于在水下控制遥控修复机器人。控制单元可以位于容器的外部,比如位于靠近燃料池的池边缘或反应堆底板处。
进一步地,通过放置在容器旁边的粘合剂混合机提供要涂敷到水下待修复位置的粘合剂,使得由粘合剂混合机混合的粘合剂被供应到粘合剂涂覆模块。比如,粘合剂混合机可以包括泵单元,该泵单元用于将混合的粘合剂泵送到位于水下的修复机器人,以便在水下修复相应的位置。
通常,粘合剂混合机可通过混合两种组分,比如混合双组分粘合剂,来混合要涂敷的粘合剂。粘合剂尤其可以包括树脂以及硬化剂(固化剂)。
一个方面提供:粘合剂被刷在水下待修复位置上。如前所述,粘合剂可以通过使用可以被驱动为适当旋转的涂敷刷来涂刷。
此外,可以在涂敷粘合剂之前清洁待修复位置,使得任何沉积物和/或残留物可以在涂敷粘合剂之前被去除。清洁可以通过涂敷刷和/或单独形成的清洁刷单元来进行。
待修复位置可以通过使用交流电场测量(ACFM)技术来定位和/或可以确定泄漏量。因此,待修复位置可以以精确的方式定位,其中,可以通过确定泄漏量来进一步识别是否提供了泄漏(如果提供)。
【附图说明】
所要求保护主题的前述方面和许多伴随的优点随着通过结合附图参考以下详细描述变得更好理解而将变得更容易理解,附图中:
图1示出了根据本发明的修复系统的示意图;
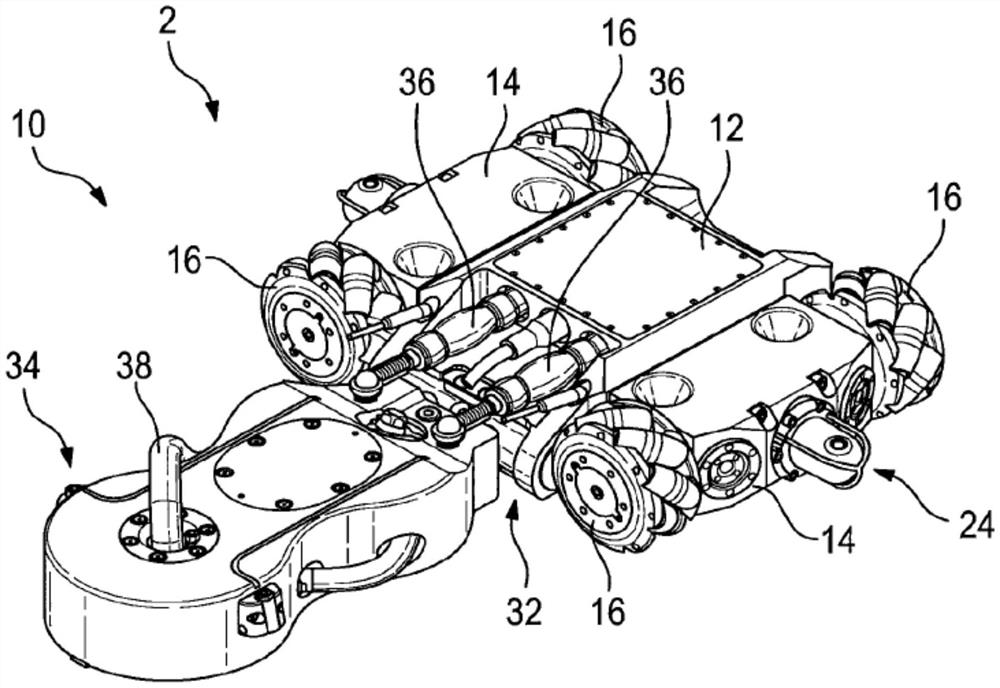
图2示出了图1的修复系统所使用的修复机器人的立体图;
图3示出了图2所示的修复机器人的另一立体图,其中设置有悬挂模块和粘合剂供应模块;
图4示出了图2所示的修复机器人的底视图;
图5示出了图2所示的修复机器人的另一立体图;
图6示出了图2所示的修复机器人的另一立体图;
图7以立体图仅示出了图2的修复机器人的修复模块;
图8示出了图7的修复模块的另一立体图;
图9示出了图2所示的修复机器人所使用的驱动模块的立体图;
图10示出了图9的驱动模块的另一立体图;
图11示出了处于另一操作模式的、图1的根据本发明的修复系统的修复机器人;
图12示出了图11的修复机器人的底视图;
图13示出了图11的修复机器人的另一立体图;
图14以立体图示出了图11的修复机器人,其中设置有悬挂模块和粘合剂供应模块;
图15示出了组合的悬挂模块和粘合剂供应模块的立体图;
图16示出了图15所示的组合构件的另一立体图;以及
图17示出了根据本发明的修复系统的修复机器人的另一概观,其例示了修复机器人的模块化结构。
【具体实施方式】
在图1中,示出了用于在水下执行修复的修复系统2。
在所示的实施方式中,修复系统2与填充有介质的容器4结合使用,其中架6放置在容器4内。比如,容器4对应于核电站的(废)燃料池,使得架6是燃料元件的架(也称为燃料架)。因此,容器4内的介质对应于酸性介质,比如包括硼酸的介质。
在容器4中,可以提供待修复位置8,该位置必须由修复系统2在水下(即在酸性介质中)修复。比如,待修复位置8位于架6下方,使得不能从容器4的顶部到达相应的位置8。
待修复位置8可对应于腐蚀位置,该腐蚀位置减小容器4的相应壁(即底壁)的壁厚。另选地或另外地,可能发生介质泄漏到地下可能经由的泄漏。
待修复位置8也可以对应于具有机械损坏和/或应力(比如机械应力或更确切地说热应力)的位置。
而且,待修复位置8可以是在将来易于损坏或故障的位置,使得相应位置被主动地修复或更确切地说以预防性方式修复。
为了修复待修复位置8,修复系统2包括可移动的遥控修复机器人10,该机器人可以用于将粘合剂涂敷到容器4中的水下待修复位置8,如将在稍后讨论的。
图2至图17中更详细地示出了可移动的遥控修复机器人10及其部件。
图2显示了可移动的遥控修复机器人10包括与两个驱动模块14连接的修复模块12,每个驱动模块包括两个轮16。如图2所示,驱动模块14的轮16由麦克纳姆轮建立,这确保修复机器人10的高可移动性。
修复模块12仅在图7和图8中示出,其中很明显,修复模块12具有分配给修复模块12的两个相对侧20的两个驱动接口18。驱动接口18被配置为各自与驱动模块14连接。
相应的驱动模块14仅在图9和图10中示出。在这些图中,很明显,驱动模块14包括对应的接口22,驱动模块14可以经由这些接口与修复模块12联接,特别是与驱动接口18联接。
比如,修复模块12包括诸如电动机的驱动器,该驱动器用于控制驱动模块14的相应轮16。
进一步地,修复机器人10包括至少一个相机模块24,该相机模块提供图像,使得在修复机器人10在水下驱动的同时,使修复系统2的用户能够观察修复机器人10的环境。
为此,相机模块24各自具有至少一个分配给可移动相机支架28的相机26,该相机支架可以由像笼子的周围保护构件30保护。可移动的相机支架28确保至少一个相机26可以移动,特别是旋转或转动,使得可以在所有维度上观察修复机器人10的环境。
在所示的实施方式中,修复机器人10包括两个相机模块24,其中,相机模块24被分配给驱动模块14。特别地,各个驱动模块14包括一个相机模块24。
相机模块24位于驱动模块14的与接口22相对的一侧,驱动模块14经由该接口连接到修复模块12。由此,修复模块12夹在两个驱动模块14之间,其中,各个相机模块24面向修复机器人10的外部,使得可以观察环境。
与所记录的图片(特别是视频)有关的数据经由相应的接口18、22转发到修复模块12。
另外,修复模块12具有控制接口31,该控制接口被配置为例如经由电线、电缆或任何其他合适的信号传输构件与单独形成的控制单元连接。
而且,修复模块12具有功能接口32,该功能接口被配置为与其他模块联接,比如如图2所示的粘合剂涂敷模块34,图2例示了修复机器人10的粘合剂涂敷模式。
功能接口32被分配给修复模块12的与驱动接口18所在的侧20基本上垂直的侧。而且,功能接口32与控制接口31相对。
因此,控制接口31、功能接口32以及驱动接口18各自被分配给修复模块12的不同侧。
如图2所示,粘合剂涂敷模块34经由两个连接构件36与修复模块12连接。连接构件36可以各自包括螺栓,粘合剂涂敷模块34经由该螺栓固定地连接到修复模块12。
一般而言,粘合剂涂敷模块34被配置为将粘合剂分配在待修复位置8上。为此,粘合剂涂敷模块34包括软管38,要涂敷的粘合剂经由该软管运送到粘合剂涂敷模块34的出口40;请参见图4。
另选地,粘合剂涂敷模块34可以包括用于将要分配的粘合剂运送到出口40的管、套管和/或管道。
如图4所示,粘合剂涂敷模块34还包括以基本上圆形的方式形成的涂敷刷42,其中,设置涂敷刷42的三个弧形部分。涂敷刷42以同心方式围绕出口40定位,使得出口与涂敷刷42之间的径向距离基本上相同。
涂敷刷42可以被驱动为使得其在粘合剂被涂敷到水下待修复位置8的同时旋转。通过这样做,待修复位置8周围的介质由于涂敷刷42的旋转而被推开,使得待修复位置8裸露。因此,确保了粘合剂可以直接涂敷在待修复位置8上,这改善了所涂敷的粘合剂的粘附特性。
此外,在将粘合剂涂敷到待修复位置8的同时,修复机器人10向前和向后移动,使得粘合剂经由涂敷刷42刷入。
如图4所示,粘合剂涂敷模块34具有由涂敷刷42环绕的涂敷面44。涂敷面44包括在其中心的出口40。
涂敷面44可以相对于涂敷水平面比如以凹入的方式弯曲,使得由于弯曲的涂敷面44的形状而提供包括待修复位置8的壁与出口40之间的空间。
在图3中,示出了修复机器人10包括定位在修复机器人10顶部的粘合剂供应模块46,其中,经由出口40涂敷的粘合剂经由粘合剂供应模块46供应到粘合剂涂敷模块34。因此,粘合剂供应模块46与粘合剂涂敷模块34流体联接。
在所示的实施方式中,粘合剂供应模块46连接到驱动模块14,每个驱动模块具有各自的开口,该开口用于容纳粘合剂供应模块46,这在图2以及图9和图10中很明显。因此,要涂敷的粘合剂被供应到驱动模块14的各自内部,驱动模块经由修复模块12与粘合剂涂敷模块34流体联接。
粘合剂供应模块46由功能单元48建立,该功能单元还包括悬挂模块50,经由该悬挂模块,修复机器人10比如经由起重机定位在容器4内。因此,悬挂模块50确保了修复机器人10可以被适当地绕绳下降。
功能单元48可以对应于公共的悬挂和供应单元,因为这两种功能都由公共的功能单元48建立。
图15和图16中更详细地示出了相应的功能单元48。这些图显示了功能单元48相对于修复模块12以及驱动模块14单独形成。相应的粘合剂供应模块46包括插入到驱动模块14中的粘合剂供应元件52,用于如上所述地供应要涂敷的粘合剂。
在图11至图14中,示出了处于另一操作模式(即清洁模式)的修复机器人10。
在清洁模式中,粘合剂涂敷模块34被与修复模块12的功能接口32连接的清洁模块54代替。
因此,修复模块12通常被配置为根据修复机器人10的操作模式与不同的模块联接,即,粘合剂涂敷模块34以及清洁模块54,如稍后将讨论的。
在清洁操作模式中,修复模块12也以与关于粘合剂涂敷模式中的修复机器人10所讨论的类似方式与驱动模块14连接。
由此,两种操作模式之间的唯一区别在于粘合剂涂敷模块34被清洁模块54代替。
清洁模块54包括至少一个清洁刷单元56,使得待修复位置8可以通过刷擦来清洁。通常,清洁刷单元56可以用于在涂敷相应的粘合剂之前清洁待修复位置8。
如图12所示,清洁刷单元56包括三个单独的刷58,每个刷以基本上圆形的方式形成,其中,各个刷59包括三个弧形部分。因此,清洁刷单元56的各个刷58基本上对应于粘合剂涂敷模块34的涂敷刷42。
不同的刷58可以被单独地和/或共同地控制,其中,刷58的控制可以取决于修复机器人10的特定清洁模式。
不考虑清洁模块54,粘合剂涂敷模块34也可以用于清洁目的,特别是相应的涂敷刷42。因此,为了清洁目的而旋转涂敷刷42,其中,当粘合剂涂敷模块34在清洁模式下操作时,没有粘合剂被分配。
在清洁过程期间,被刷掉的材料可以被抽吸构件(未示出)以及连接到抽吸构件的过滤器吸入,使得吸入的材料可以被收集在过滤器内。比如,在清洁过程期间,过滤器也被放置在容器4内。
如已经讨论的,修复系统2通常用于修复容器4(比如核电站的(废)燃料池)内的水下待修复位置8,特别是如图1所示的不能从容器4的顶部到达的位置8。
为此,修复系统2使用可在水下移动并因此由控制单元60遥控的修复机器人10;请参见图1。
控制单元60经由其控制接口31和适当的电缆或电线62与修复机器人10连接。
控制信号以及来自修复机器人10的信号可以经由电缆或电线62传输,使得建立双向通信。
另外,除了控制单元60之外,修复系统2还包括提供要涂敷的粘合剂的粘合剂混合机64。
粘合剂混合机64以及控制单元60位于容器4的外部,比如在如图1所示的靠近容器4的池边缘或反应堆底板处。
在粘合剂混合机64中混合的粘合剂经由软管66运送到修复机器人10。另选地,导管、管道、管线或任何其它合适的构件用于供应粘合剂。
实际上,粘合剂通过粘合剂混合机64的泵送单元68泵送到修复机器人10,特别是粘合剂涂敷模块46。
粘合剂混合机64,特别是其泵送单元68,也由控制单元60控制。
一般而言,可移动的遥控修复机器人10是模块化结构,使得可以组合若干模块。这在图17中示出,其中,由于在分解图中示出了修复机器人10的若干不同模块,所以例示了修复机器人10的模块化结构。
修复模块12是修复机器人10的中心模块(或主模块),该模块具有若干接口18、31、32,这些接口可以用于互连不同的模块,诸如驱动模块14、粘合剂涂敷模块34、清洁模块54、位置查找模块70和/或泄漏确定模块72。比如,位置查找模块70由交流电场测量(ACFM)模块建立,而泄漏确定模块72由真空箱模块建立。
各个模块可以同时与修复模块12联接,如图1至图6以及图11至图14所示。而且,某些模块可以随后联接,如将在下文中描述的。
通过使用确保修复模块12的高连接性的通用接口,尤其确保修复机器人10的模块化结构。
下文中,更详细地描述通过使用上述修复系统2在容器4中在水下执行的修复方法。
首先,将修复系统2的部件设置在靠近容器4(比如(废)燃料池)的池边缘或反应堆底板处。
然后,针对期望的操作模式,比如位置查找模式、泄漏确定模式、清洁模式或粘合剂涂敷模式,来配置模块化结构的修复机器人10。
前三种操作模式,即位置查找模式、泄漏确定模式和清洁模式,可以是可选的。尽管如此,下文中描述包含所有操作模式的整个修复方法。
由此,必须在开始时识别待修复位置8,比如腐蚀位置。
为此,可以将位置查找模块70与修复模块12连接,特别是经由功能接口32。
另外,将驱动模块14(具有相机模块24)经由驱动接口18与修复模块12联接,使得建立可移动的遥控修复机器人10。
将修复机器人10,特别是修复模块12,经由连接到控制接口31的电缆或电线62与控制单元60连接,使得修复机器人10可被遥控。
为了将修复机器人10放置在容器4中,将至少悬挂模块50与修复机器人10连接,使得修复机器人10可以比如经由起重机插入到容器4中。
然后,控制修复机器人10,以便在水下在容器4内移动,其中,相应的控制信号被转发到驱动模块14,使得相应的轮16向前、向后和/或在期望的方向上移动。
当在水下在容器4内驱动修复机器人10的同时,位置查找模块70检查容器4,比如壁、焊点等,以便查找并定位应当修复的关键位置,诸如腐蚀位置。
出于定向目的,由于相机模块24(提交)的视频和/或图片,用户可以在修复机器人10在水下移动的同时导航修复机器人10。
一旦腐蚀查找模块70识别出可能对应于泄漏的位置和/或具有减小的壁厚的位置(通常:待修复位置8),则记录相应的位置,使得其稍后可容易地再次找到。
如上所述,待修复位置8也可对应于以预防性方式修复的位置。
然后,可以将修复机器人10从容器4去除,以便通过泄漏确定模块72替换位置寻找模块70,以便确定该位置是否对应于泄漏。因此,位置查找模块70与修复模块12分离,该修复模块与泄漏确定模块72联接,特别是经由功能接口32。
然而,位置查找模块70和泄漏确定模块72可以被集成,使得就在相应的关键位置被位置查找模块70识别之后,可能的泄漏可以被识别。
然后,可以通过清洁模块54清洁先前特别是关于可能的泄漏而识别的待修复位置8,使得为粘合剂涂敷准备位置8。
由此,修复机器人10可以(再次)从容器4去除,使得清洁模块54可以经由功能接口32与修复模块12联接。修复机器人10处于清洁操作模式,其中,在清洁操作模式中,修复机器人10可以基本上对应于图11至图14中示出的修复机器人10。
然而,位置查找模块70和/或泄漏确定模块72也可以联接到除了功能接口32之外的另一接口,使得修复模块12可以在开始时已经与清洁模块54以及位置查找模块70和/或泄漏确定模块72联接。
因此,待修复位置8可由位置查找模块70定位,可能的泄漏由泄漏确定模块72识别,并且然后,待修复位置8可由清洁模块54清洁,而无需将修复机器人10从容器4中提出。
具有联接到修复模块12的清洁模块54的修复机器人10以遥控的方式移动到相应的待修复位置8。
一旦修复机器人10到达水下待修复位置8,清洁模块54,特别是至少一个清洁刷单元56,清洁待修复位置8,使得任何沉积物和/或残留物被至少一个清洁刷单元56,特别是清洁刷单元56的几个刷58刷掉。被刷掉的沉积物和/或残留物被抽吸构件吸入,其中,相应的材料被收集在过滤器中,过滤器随后可以被清空。
在清洁了待修复位置8之后,(再次或首次)将修复机器人10从容器4中提出(经由起重机和悬挂模块50)。然后,可以将清洁模块54与修复模块12分离,使得粘合剂涂敷模块34可经由功能接口32连接到修复模块12。因此,修复机器人10处于粘合剂涂敷操作模式,使得修复机器人10基本上对应于图2至图6所示的修复机器人。
然后,将修复机器人10放置(特别是绕绳下降)在容器4中,并且以遥控的方式在水下驱动到相应的待修复位置8。
一旦具有粘合剂涂敷模块34的修复机器人10到达先前清洁过的待修复位置8,则将要涂敷的粘合剂经由粘合剂混合机64和粘合剂供应模块46运送到粘合剂涂敷模块34,使得粘合剂经由粘合剂涂敷模块34的出口40分配在待修复位置8上。出口40可以由(常规的)喷嘴建立。
在分配粘合剂期间,驱动粘合剂涂敷模块34的至少一个涂敷刷42,使得涂敷刷42旋转。因此,待修复位置8周围的介质,比如酸性介质,被旋转的涂敷刷42推开。由此,使待修复位置8裸露,这确保粘合剂可以直接涂敷在待修复位置8上。
而且,在粘合剂涂敷期间,控制修复机器人10向前和/或向后移动,使得涂敷刷42与分配的粘合剂以及待修复位置8接触。
由于修复机器人10的移动和/或涂敷刷42的旋转,粘合剂被刷入位置8中或刷到位置8上。
比如,涂敷刷42每分钟旋转1至300转。然而,也可以在不旋转涂敷刷42的情况下涂敷粘合剂。而且,修复机器人10具有5至100cm/min的速度。涂敷在待修复位置8上的粘合剂可以具有100至200mm的宽度。进一步地,涂敷在待修复位置8上的粘合剂的厚度可以在0.5mm至10mm之间变化。
一般而言,所使用的粘合剂可以是自流平粘合剂,比如聚合物粘合剂,特别是环氧树脂粘合剂。粘合剂本身可以是抗辐射的。而且,粘合剂可以是在由粘合剂混合机64涂敷之前混合的双组分粘合剂。粘合剂混合机64可以通过混合至少树脂以及硬化剂(固化剂)来混合要涂敷的粘合剂。
然后,由粘合剂混合机64的泵送单元68比如以50至500ml/min的流速泵送自流平粘合剂。
一般而言,当修复机器人10向后移动时,自流平粘合剂可以被涂敷在待修复位置8上,使得确保修复机器人10不会被驱动到上面先前已经涂敷有粘合剂的待修复位置8上方。
此外,涂敷刷42也可以用作清洁刷,使得粘合剂涂敷模块34也是清洁模块54。因此,各个模块34、54不必互换,这改进了修复相应位置8所需的时间。
比如,当沿着位置8、特别是焊缝向前驱动修复机器人10时,待修复位置8由涂敷刷42清洁,其中,涂敷刷42被驱动为旋转,以便去除沉积物和/或残留物。然后,当向后驱动修复机器人10时,粘合剂涂敷模块34涂敷粘合剂。
一般而言,涂敷刷42在涂敷粘合剂期间可以不旋转。
作为单独形成的粘合剂供应模块46的另选方案,粘合剂可以直接供应到粘合剂涂敷模块34。
因此,粘合剂被涂敷在水下待修复位置8上,其中,修复系统2确保可以修复由于遥控修复机器人10被驱动到相应位置8(比如不能从容器4的顶部接近的架6下方的位置)而不能从容器4的顶部到达的位置。
在所示的实施方式中,修复机器人10沿着容器4的底壁被驱动,其中,可移动的修复机器人10可以接近分配给容器4的底壁的各个位置和每个位置。
- 用于牙齿修复系统的医疗装置、牙齿修复系统、医疗装置的应用及修复装置的形成方法
- 河道水体原位修复系统、生态修复系统及应用