指纹感测装置
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及一种感测装置,尤其涉及一种指纹感测装置。
背景技术
现今指纹辨识广泛运用于各种电子产品上,又以可携式行动装置例如是手机(Smart phone)、平板计算机(Tablet computer)最为常见。应用于智能型手机的指纹辨识,目前常见的指纹感测装置可分为光学式、电容式、超声波式等。常见的超声波式指纹感测装置为利用压电式微机械超声波换能器(Piezoelectric Micromachined UltrasonicTransducer,PMUT)来发射与接收超声波,以进行指纹感测。由于压电式微机械超声波换能器需较高的交流驱动电压(100~200V),且需制作于硅基板上以与互补式金氧半导体(Complementary Metal-Oxide Semiconductor,CMOS)电路制作在一起,因此制作成本较高,而不适于应用在大面积指纹感测。
发明内容
本发明提供一种指纹感测装置,可大幅降低超声波式指纹感测装置的制作成本,而适于在大面积指纹感测中应用。
本发明的指纹感测装置包括信号发射接收层、驱动电路、感测电路层以及基板。信号发射接收层包括由多个电容性微机械超声波换能器形成的电容性微机械超声波换能器阵列。驱动电路耦接电容性微机械超声波换能器阵列,于发射期间驱动电容性微机械超声波换能器阵列发射平面超声波至手指而产生多个反射超声波信号,电容性微机械超声波换能器于接收期间接收反射超声波信号而产生多个感测电流信号。感测电路层包括多个感测电路,此些感测电路分别耦接对应的电容性微机械超声波换能器,感测电容性微机械超声波换能器输出的感测电流信号而产生多个指纹感测信号。感测电路层形成于基板上,信号发射接收层形成于感测电路层上,其中基板为玻璃基板或硅基板。
基于上述,本发明实施例的驱动电路可于发射期间驱动微机械超声波换能器阵列发射平面超声波至手指而产生反射超声波信号,微机械超声波换能器可于接收期间接收反射超声波信号而产生多个感测电流信号,感测电路感测微机械超声波换能器输出的感测电流信号而产生指纹感测信号。相较于使用压电式微机械超声波换能器进行指纹感测,使用微机械超声波换能器进行指纹感测所需的交流驱动电压较低。此外由于微机械超声波换能器可形成于玻璃基板上,相较于使用硅基板的制作方式可大幅节省制作成本,而适于在大面积指纹感测中应用。
为让本发明的上述特征和优点能更明显易懂,下文特举实施例,并配合附图作详细说明如下。
附图说明
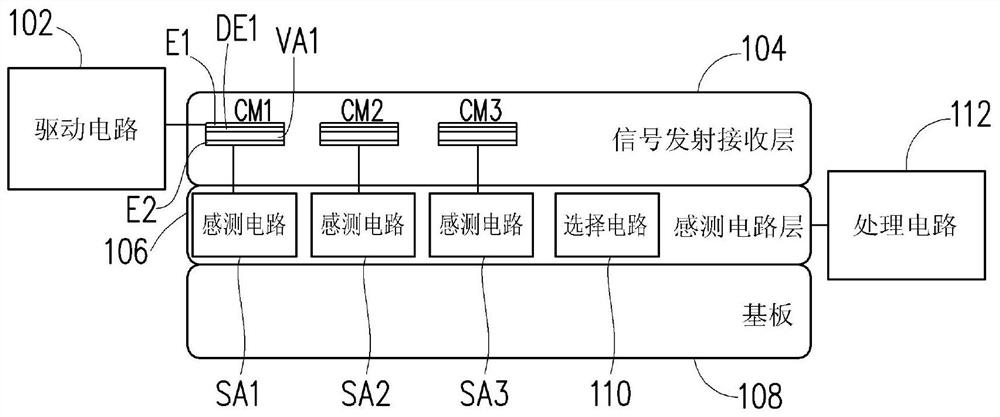
图1是依照本发明实施例的一种指纹感测装置的示意图。
图2是依照本发明另一实施例的一种指纹感测装置的示意图。
图3是依照本发明实施例的一种驱动信号的示意图。
图4是依照本发明一实施例的一种驱动电路的示意图。
图5是依照本发明另一实施例的驱动信号的示意图。
图6是依照本发明实施例的一种感测电路的示意图。
图7是依照本发明实施例的一种感测电流信号、读取控制信号以及指纹感测信号的波形图。
图8是依照本发明另一实施例的感测电路的示意图。
具体实施方式
图1是依照本发明的实施例的一种指纹感测装置的示意图,请参照图1。指纹感测装置可包括驱动电路102、信号发射接收层104、感测电路层106、基板108以及处理电路112,其中感测电路层106形成于基板108上,信号发射接收层104形成于感测电路层106上,基板108例如为玻璃基板或硅基板。信号发射接收层104耦接驱动电路102,感测电路层106耦接处理电路112。信号发射接收层104包括由多个电容性微机械超声波换能器(CapacitiveMicromachined Ultrasonic Transducer,CMUT)CM1~CMN形成的电容性微机械超声波换能器阵列,驱动电路102耦接电容性微机械超声波换能器阵列,此外感测电路层106可例如以薄膜晶体管(TFT)工艺形成于玻璃基板上或以互补金氧半导体(CMOS)工艺形成于硅基板上的方式来制作,感测电路层106包括多个感测电路SA1~SAN以及选择电路110,其中N为正整数。为便于说明图1仅绘示出3个电容性微机械超声波换能器CM1~CM3以及3个感测电路SA1~SA3,然实际应用并不以此为限。
进一步来说,以电容性微机械超声波换能器CM1为例,各个电容性微机械超声波换能器可包括电极层E1、E2以及介电层DE1,其中介电层DE1配置于电极层E1与E2之间,且介电层DE1与电极层E2间形成空腔VA1。其中电极层E1与E2的材料可例如包括铝、镍、钛、铜或银,电极层E1与E2的厚度介于0.1um~1.5um,介电层DE1的材料可包括二氧化硅、氧化铝或氮化硅,介电层DE1的厚度介于0.1um~1.5um,介电层DE1与电极层E2的间隙介于0.03um~0.5um。电极层E1耦接至驱动电路102,而电极层E2则耦接对应的感测电路SA1,此外选择电路110耦接感测电路SA1~SA3以及处理电路112。在部份实施例中,驱动电路102可如图2所示,包括直流电压产生电路Vdc以及波形产生电路Vac,其中直流电压产生电路Vdc耦接电容性微机械超声波换能器阵列以及波形产生电路Vac。
驱动电路102可于发射期间输出驱动信号S1驱动电容性微机械超声波换能器阵列发射平面超声波至手指而产生多个反射超声波信号,各个电容性微机械超声波换能器可于接收期间接收此些反射超声波信号而产生多个感测电流信号IS1~ISN。进一步来说,在发射期间,波形产生电路Vac可提供具有预设波形的交流电压,而直流电压产生电路Vdc提供直流电压,举例来说,如图3所示的驱动信号S1,在发射期间TA,波形产生电路Vac可提供方波信号与直流电压产生电路Vdc提供的直流电压迭加,而产生如图3所示的驱动信号S1。各个电容性微机械超声波换能器的电极层E1接收到驱动信号S1后,电极层E1与电极层E2间的电场将因驱动信号S1变动,使电极层E1与电极层E2反应驱动信号S1产生振动,而产生超声波信号,进而使电容性微机械超声波换能器阵列发射平面超声波至使用者的手指,平面超声波经手指反射后产生多个反射超声波信号。
其中在发射期间TA结束后,波形产生电路Vac可停止提供交流电压,以使电容性微机械超声波换能器阵列停止发射平面超声波,而直流电压产生电路Vdc仍持续提供直流电压。在接收期间,电容性微机械超声波换能器SA1~SAN的电极层E1与E2间的电场将因接收到反射超声波信号而产生变化,从而产生对应的感测电流信号IS1~ISN。
感测电路SA1~SAN可分别接收感测电流信号IS1~ISN,并依据感测电流信号IS1~ISN产生多个指纹感测信号FS1~FSN,其中指纹感测信号FS1~FSN分别与感测电流信号IS1~ISN呈比例关系。选择电路110可依据行列选择信号选择输出指纹感测信号FS1~FSN至处理电路112,以使处理电路112依据指纹感测信号FS1~FSN产生指纹影像,并对指纹影像进行指纹辨识处理。
如此藉由电容性微机械超声波换能器来进行指纹感测可降低所需的交流驱动电压。此外,包括电容性微机械超声波换能器的信号发射接收层104可与感测电路层106以同一TFT工艺形成于玻璃基板上,而不需分别以不同工艺制作而后再进行接合的方式制作,相较于使用硅基板的制作方式可大幅节省成本,而适于在大面积指纹感测中应用。
值得注意的是,在部份实施例中,驱动电路102产生的波形并不限定于方波。举例来说,图4是依照本发明一实施例的一种驱动电路的示意图。相较于图2实施例,本实施例的驱动电路102除了直流电压产生电路Vdc与直流电压产生电路Vdc外,还包括电阻R、电感L以及电容C,其中电阻R耦接于直流电压产生电路Vdc与电感L的一端,电感L的另一端耦接驱动电路102的输出端,电容C耦接于驱动电路102的输出端与参考电压(在本实施例中参考电压为接地,然不以此为限)之间。藉由电阻R、电感L以及电容C可使驱动电路102产生如图5所示的单频脉冲调制信号(tone burst)般的驱动信号S1。
图6是依照本发明实施例的一种感测电路的示意图。详细来说,各感测电路的实施方式可例如图6所示,包括电阻R1、读取晶体管M1,整流二极管D1以及电容C1。以感测电路SA1为例,电阻R1耦接于读取晶体管的第一端与接地之间,读取晶体管M1的第一端耦接对应的电容性微机械超声波换能器CM1的输出端,整流二极管D1的阳极端与阴极端分别耦接读取晶体管M1的第二端与感测电路SA1的输出端之间,电容C1耦接于整流二极管D1的阴极端与接地之间。读取晶体管M1的控制端可于接收期间接收读取控制信号VRD,读取晶体管M1受控于该读取控制信号而于读取期间进入导通状态,其中读取期间包含于接收期间内。进一步来说,由于电容性微机械超声波换能器阵列于发射期间发射平面超声波后,需经过一段时间才会转变为反射超声波信号并回到电容性微机械超声波换能器阵列,因此,各感测电路可于电容性微机械超声波换能器阵列于发射期间发射平面超声波后经过一段预设时间被使能,如图7所示,读取控制信号VRD可在电容性微机械超声波换能器阵列于发射期间发射平面超声波后,经过一段预设时间T1才转为高电压电平,而使读取晶体管M1进入导通状态,以对感测电流信号IS1进行取样。感测电流信号IS1可透过整流二极管D1以及电容C1转变为指纹感测信号FS1而被感测电路SA1输出。值得注意的是,在部份实施例中,读取晶体管M1在接收期间内可多次地进入读取期间,以在不同的时间点取样出多个指纹感测信号,以供处理电路112据以产生指纹影像。
图8是依照本发明另一实施例的感测电路的示意图。在本实施例中,各感测电路的实施方式可例如图8所示,包括重置晶体管M2、转换晶体管M3、读取晶体管M4,整流二极管D2以及电容C2、C3。以感测电路SA1为例,重置晶体管M2的第一端耦接重置电压VB1,重置晶体管M2的第二端耦接对应的电容性微机械超声波换能器CM1,重置晶体管M2的控制端耦接重置控制信号。整流二极管D2的阳极端与阴极端分别耦接于重置晶体管的第一端与第二端。电容C2耦接于整流二极管D2的阴极端与接地之间。转换晶体管M3的控制端耦接整流二极管D2的阴极端,转换晶体管M3的第一端耦接电源电压VCC。读取晶体管M4的第一端耦接转换晶体管M3的第二端,读取晶体管M4的第二端耦接感测电路SA1的输出端,读取晶体管M4的控制端接收读取控制信号VRD。此外,电容C3耦接于读取晶体管的第二端与接地之间。
在重置期间,重置晶体管M2可受控于重置控制信号VRST而于重置期间进入导通状态,以使重置电压VB1重置转换晶体管M3的控制端的电压。在接收期间,转换晶体管M3可反应电容性微机械超声波换能器SA1提供的感测电流信号IS1而于转换晶体管M3的第二端产生对应的指纹感测信号FS1,读取晶体管FS1则可受控于读取控制信号VRD而于读取期间进入导通状态,以将此指纹感测信号FS1透过选择电路110传送给处理电路112进行指纹辨识处理。
值得注意的是,上述实施例为以电容性微机械超声波换能器阵列为例进行说明,然不以此为限,在其他实施例中,电容性微机械超声波换能器阵列也可改以由多个压电性微机械超声波换能器形成的压电性微机械超声波换能器阵列或由多个压电薄膜微机械超声波换能器形成的压电薄膜微机械超声波换能器阵列实施。
综上所述,本实施例的驱动电路可于发射期间驱动微机械超声波换能器阵列发射平面超声波至手指而产生反射超声波信号,微机械超声波换能器可于接收期间接收反射超声波信号而产生多个感测电流信号,感测电路感测微机械超声波换能器输出的感测电流信号而产生指纹感测信号。相较于使用压电式微机械超声波换能器进行指纹感测,使用微机械超声波换能器进行指纹感测所需的交流驱动电压较低,此外由于微机械超声波换能器可形成于玻璃基板上,相较于使用硅基板的制作方式可大幅节省制作成本,而适于在大面积指纹感测中应用。
虽然本发明已以实施例揭示如上,然其并非用以限定本发明,任何所属技术领域中技术人员,在不脱离本发明的精神和范围内,当可作些许的更改与润饰,故本发明的保护范围当视权利要求所界定的为准。
- 指纹感测装置、具指纹感测功能的产品及其指纹感测方法
- 指纹感测装置、包括其的电子装置及该指纹感测装置的制造设备