一种水文信息监控方法、系统以及存储介质
文献发布时间:2023-06-19 11:22:42
技术领域
本申请涉及水文监控技术领域,尤其是涉及一种水文信息监控方法、系统以及存储介质。
背景技术
水文监测是指通过水文站网对江河、湖泊、渠道、水库的水位、流量、泥沙、降水、蒸发、水温、水质、墒情、冰情、风暴潮等实施观测,并进行分析和计算的活动。
目前,针对湖泊水文水质的监控主要采用卫星遥感和人工取样的方法。但遥感获得的信息非常的有限,并不能完全反映真实的情况;而面对大面积的湖泊,人工取样的范围又有很大的局限性,同时耗费的人和物力非常的巨大。但湖面大面积布网技术由于其本身存在的能源受限、位置不定、环境恶劣等原因一直是个盲区。
现有申请号为200910197881X且专利名称为基于无线传感网的湖泊水文水质监测系统及监测方法,其通过分布于湖面的基本采集单元采集湖泊水文水质信息,并汇总至基站,再由基站将汇总的信息传送至监控系统,让监控系统作最后的数据分析。
针对上述中的相关技术,发明人认为存在有如下缺陷:大面积湖泊所处环境往往比较恶劣且较为偏僻,基本采集单元在恶劣外界环境(例如大风、大雨)的影响下容易导致内置于基本采集单元的信号发送模块受外力冲击下发生故障,出现无法作信号传递的情况,进而影响基站对水文信息的汇总处理。
发明内容
为了有效保障了基站对水文信息的汇总,从而进一步保障了对大面积湖泊水文信息的监控,本申请提供一种水文信息监控方法、系统以及存储介质。
第一方面,本申请提供一种水文信息监控方法,采用如下的技术方案:
一种水文信息监控方法,包括:
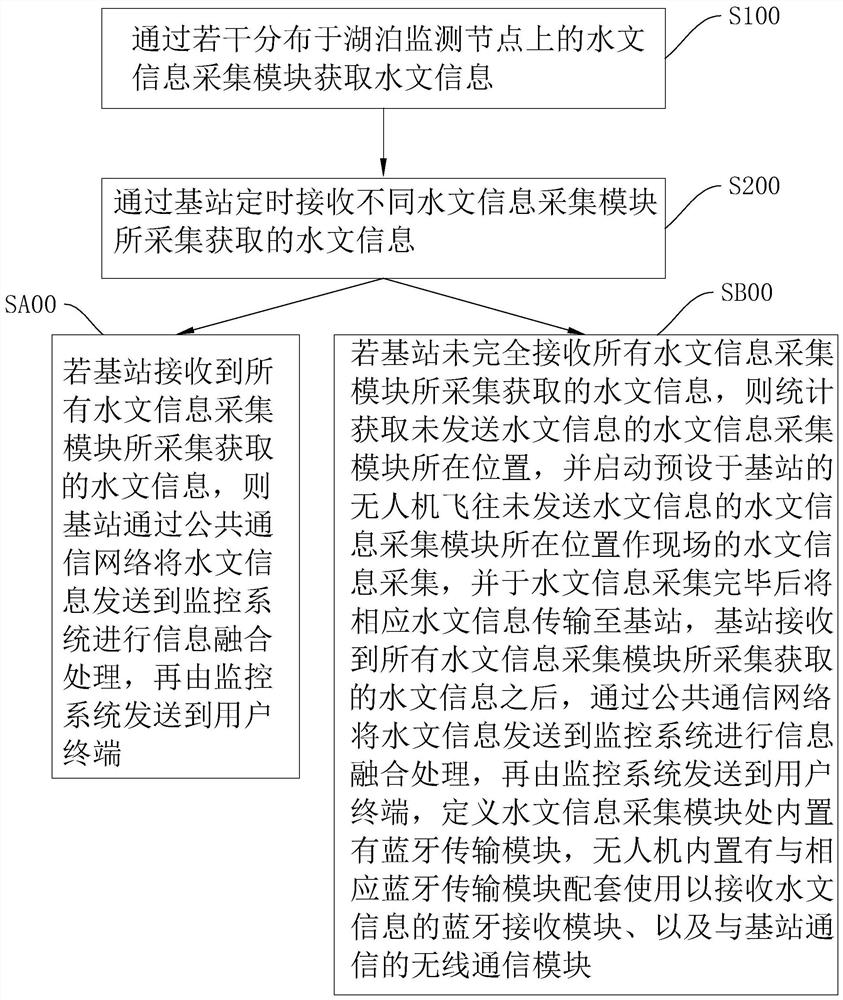
通过若干分布于湖泊监测节点上的水文信息采集模块获取水文信息;
通过基站定时接收不同水文信息采集模块所采集获取的水文信息;
若基站接收到所有水文信息采集模块所采集获取的水文信息,则基站通过公共通信网络将水文信息发送到监控系统进行信息融合处理,再由监控系统发送到用户终端;
若基站未完全接收所有水文信息采集模块所采集获取的水文信息,则统计获取未发送水文信息的水文信息采集模块所在位置,并启动预设于基站的无人机飞往未发送水文信息的水文信息采集模块所在位置作现场的水文信息采集,并于水文信息采集完毕后将相应水文信息传输至基站,基站接收到所有水文信息采集模块所采集获取的水文信息之后,通过公共通信网络将水文信息发送到监控系统进行信息融合处理,再由监控系统发送到用户终端,定义水文信息采集模块处内置有蓝牙传输模块,无人机内置有与相应蓝牙传输模块配套使用以接收水文信息的蓝牙接收模块、以及与基站通信的无线通信模块。
通过采用上述技术方案,通过基站定时接收水文信息的方式可以针对水文信息的发送情况作监控,从而间接分析出有哪些水文信息采集模块存在信息无法正常发送的问题,并能够针对这些无法正常发送信息的水文信息采集模块,通过无人机逐一采集相应水文信息并发送回基站,保障基站及时获取所有水文信息作信息的融合处理。
可选的,通过基站定时接收不同水文信息采集模块所采集获取的水文信息的步骤如下:
从预设的存储有水文信息采集模块、相应水文信息采集模块所在位置、相应水文信息采集模块所需传递水文信息的基站、以及相应水文信息采集模块传递水文信息的定时时间的第一数据库中,以水文信息采集模块作为查询对象,查询获取出水文信息采集模块所需传递水文信息的基站以及相应水文信息采集模块传递水文信息的定时时间;
水文信息采集模块按照查询获取的定时时间定时发送水文信息至相应基站。
通过采用上述技术方案,可以有效确定不同水文信息采集模块所需传递水文信息的基站以及发送水文信息的时机,从而保障基站能够定期接收到相应的水文信息作信息融合,有利于在外界有需要的时候能够及时获取最新的水文信息。
可选的,若基站未完全接收所有水文信息采集模块所采集获取的水文信息,则统计获取未发送水文信息的水文信息采集模块所在位置的步骤如下:
从第一数据库中查找出相应基站所需接收信息的所有水文信息采集模块;
基于基站理论所需接受的水文信息以及实际所接收到的水文信息,反向分析出未发送水文信息的水文信息采集模块并确定相应水文信息采集模块所在位置。
通过采用上述技术方案,通过基站所对应的所有水文信息采集模块以及其所接收到的水文信息,可以有效判断出其所未接收到水文信息所对应的水文信息采集模块,并能够及时有效确定其相应位置,从而方便及时规划无人机飞往相应未发送水文信息的水文信息采集模块作水文信息的补充采集,从而保障基站及时作水文信息融合。
可选的,启动预设于基站的无人机飞往未发送水文信息的水文信息采集模块所在位置作现场的水文信息采集的步骤如下:
获取未发送水文信息的水文信息采集模块所在位置;
规划路经所有未发送水文信息的水文信息采集模块所在位置并返回基站的最短路径;
无人机沿最短路径逐一采集未发送水文信息的水文信息采集模块的水文信息。
通过采用上述技术方案,可以有效规划出无人机完成其余水文信息采集的最短路径,从而间接提高了基站及时获取补入的水文信息作水文信息的融合。
可选的,还包括设置于规划路经所有未发送水文信息的水文信息采集模块所在位置的最短路径之后且位于无人机沿最短路径逐一采集未发送水文信息的水文信息采集模块的水文信息的步骤;
获取路经所有未发送水文信息的水文信息采集模块所在位置且返回基站的最短路径以及相应最短路径的距离;
将最短路径的距离与预设的无人机单位距离的耗电量的乘积,与预设的无人机预设最低电量之和作为无人机所需保持的电量;
若无人机所需保持的电量超过无人机当前的电量且低于无人机所能保持的最大电量,则将无人机所需保持的电量作为被减数,无人机当前的电量作为减数,获取无人机所需补充的电量,在无人机起飞前按照无人机所需补充的电量对无人机作补充充电;
若无人机所需保持的电量超过无人机所能保持的最大电量,则基于无人机所需保持的电量、未发送水文信息的水文信息采集模块所在位置、无人机单位距离的耗电量、以及所规划的最短路径分析确定无人机的充电策略,并控制无人机按照所规划路径行进的同时按照所分析确定的无人机充电策略对无人机充电,定义基站以及每个水文信息采集模块所在位置处均设置有供无人机充电现场充电的充电设备。
通过采用上述技术方案,进一步考虑到了在无人机电量有限的情况,如何基于所规划路径情况以及无人机的剩余电量情况有效分析确认无人机的充电时机,从而保障无人机顺利完成水文信息的补入。
可选的,预设的无人机单位距离的耗电量获取步骤如下:
获取无人机当前起飞的外界风量情况;
从预设的存储有历史无人机在不同风量情况下的单位距离耗电量的第二数据库中,以无人机当前起飞的外界风量作为查询对象,查询获取无人机与当前起飞的外界风量情况一致且最临近一次的单位距离耗电量,同时查询出无人机最临近一次的单位距离耗电量;
基于无人机与当前起飞的外界风量情况一致且最临近一次的单位距离耗电量、以及无人机最临近一次的单位距离耗电量,并应用权重公式预测分析出无人机本次起飞后的单位距离耗电量,具体权重公式如下:Z=A*P+B*Q,Z为无人机本次起飞后的单位距离耗电量,A为无人机与当前起飞的外界风量情况一致且最临近一次的单位距离耗电量,P为A的权重占比,B为无人机最临近一次的单位距离耗电量,Q为B的权重占比。
通过采用上述技术方案,综合考虑了无人机在有风情况下的单位距离耗电量以及最临近一次的无人机单位距离耗电电量,从而更加精确的分析出无人机本次飞行的单位距离耗电量,从而能够更加精准的制定出无人机的充电策略,保障无人机对水文信息的有效补入。
可选的,基于无人机所需保持的电量、未发送水文信息的水文信息采集模块所在位置、无人机单位距离的耗电量、以及所规划的最短路径分析确定无人机的充电策略的步骤如下:
以无人机按照当前电量与无人机预设最低电量的差值作为被除数,无人机单位距离的耗电量作为除数,分析出无人机当前电量所能持续飞行的距离;
无人机通过预设于基站的充电站首先充满电,并基于无人机沿所规划最短路径到的每个未发送水文信息的水文信息采集模块位置的距离、以及无人机单位距离的耗电量,分析出无人机在离开基站后所到每个未发送水文信息的水文信息采集模块后的剩余电量以及返回基站时的剩余电量;
若无人机至下个水文信息采集模块或返回基站时的剩余电量小于0时,则无人机在前一个水文信息采集模块将电量充至满足无人机沿最短路径返回基站的电量为止。
通过采用上述技术方案,考虑在无人机所需保持的电量超过无人机所能保持的最大电量的情况,在相应情况发生时,能够规划无人机在途经的水文信息模块位置处作补充充电的时机,从而有效保障无人机顺利完成水文信息的采集。
第二方面,本申请提供一种水文信息监控系统,采用如下的技术方案:
一种水文信息监控系统,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的程序,该程序能够被处理器加载执行时实现如上述权利要求任一项所述的一种水文信息监控方法。
通过采用上述技术方案,通过程序的调取,通过基站定时接收水文信息的方式可以针对水文信息的发送情况作监控,从而间接分析出有哪些水文信息采集模块存在信息无法正常发送的问题,并能够针对这些无法正常发送信息的水文信息采集模块,通过无人机逐一采集相应水文信息并发送回基站,保障基站及时获取所有水文信息作信息的融合处理。
第三方面,本申请提供一种计算机存储介质,采用如下的技术方案:
一种计算机存储介质,包括能够被处理器加载执行时实现如上述权利要求中任一项所述的水文信息监控方法的程序。
通过采用上述技术方案,通过程序的调取,通过基站定时接收水文信息的方式可以针对水文信息的发送情况作监控,从而间接分析出有哪些水文信息采集模块存在信息无法正常发送的问题,并能够针对这些无法正常发送信息的水文信息采集模块,通过无人机逐一采集相应水文信息并发送回基站,保障基站及时获取所有水文信息作信息的融合处理。
综上所述,本申请的有益技术效果为:有效分析出在信息无法正常发送的水文信息采集模块,并及时规划无人机飞行的路径对这些水文信息采集模块作水文信息采集。
附图说明
图1是本申请实施例水文信息监控方法的步骤示意图。
图2是图1中步骤S200的具体步骤示意图。
图3是图1中步骤SB0所提及若基站未完全接收所有水文信息采集模块所采集获取的水文信息,则统计获取未发送水文信息的水文信息采集模块所在位置的步骤示意图。
图4是图1中步骤SB00所提及的启动预设于基站的无人机飞往未发送水文信息的水文信息采集模块所在位置作现场的水文信息采集的步骤示意图。
图5是设置于图4中步骤SBB0和步骤SBC0之间的步骤示意图。
图6是图5中步骤Sb00所提及的预设的无人机单位距离的耗电量的获取步骤示意图。
图7是图5中步骤Sd00所提及无人机的充电策略的分析确定步骤示意图。
具体实施方式
以下结合附图对本申请作进一步详细说明。
参照图1,为本申请公开的一种水文信息监控方法,包括步骤S100、步骤S200、步骤SA00、步骤SB00,其中,步骤SA00与步骤SB00为并行步骤。
在步骤S100中,通过若干分布于湖泊监测节点上的水文信息采集模块获取水文信息。
具体来说,步骤S100所提及的水文信息采集模块包括多个传感器、挂接多个传感器的核心控制器、无线信息传输器、蓝牙发送器、GPS定位模块构成,核心控制器通过电源控制和接口交互的方式与各个传感器进行通信;步骤S100所提及的水文信息采集模块所在的监测节点的分布方式为从基站开始逐层产生子节点的生长树方式。
另外,上述所提及的多个传感器包括水质检测传感器、水位传感器、水温传感器、液体流速流量传感器、液体PH值传感器、水含氧传感器、余氯传感器或电导率传感器等用于采集水文信息的传感器,水文信息包括水域当前的水质信息、水位信息、水温信息、水流速流量信息、水PH值信息、水含氧量信息、水余氯信息或水电导率信息等水文信息中的一个或多种。
在步骤S200中,通过基站定时接收不同水文信息采集模块所采集获取的水文信息。
具体来说,步骤S200所提及的基站是设于岸边的sink基站。
参照图2,其中,步骤S200可划分为步骤S210至步骤S220。
在步骤S210,从预设的存储有水文信息采集模块、相应水文信息采集模块所在位置、相应水文信息采集模块所需传递水文信息的基站、以及相应水文信息采集模块传递水文信息的定时时间的第一数据库中,以水文信息采集模块作为查询对象,查询获取出水文信息采集模块所需传递水文信息的基站以及相应水文信息采集模块传递水文信息的定时时间。
在步骤S220,水文信息采集模块按照查询获取的定时时间定时发送水文信息至相应基站。
举例来说,若水文信息采集模块在第一数据库查询获取的定时时间为3小时,那么相应水文信息采集模块会每隔3小时将所采集到的水文信息传送给基站。
在步骤SA00中,若基站接收到所有水文信息采集模块所采集获取的水文信息,则基站通过公共通信网络将水文信息发送到监控系统进行信息融合处理,再由监控系统发送到用户终端。
其中,步骤SA00所提及的监控系统为网络服务器,步骤SA00所提及的用户终端可以为手机或电脑,也可以是其他可以接收外界信号的设备。
在步骤SB00中,若基站未完全接收所有水文信息采集模块所采集获取的水文信息,则统计获取未发送水文信息的水文信息采集模块所在位置,并启动预设于基站的无人机飞往未发送水文信息的水文信息采集模块所在位置作现场的水文信息采集,并于水文信息采集完毕后将相应水文信息传输至基站,基站接收到所有水文信息采集模块所采集获取的水文信息之后,通过公共通信网络将水文信息发送到监控系统进行信息融合处理,再由监控系统发送到用户终端,定义水文信息采集模块处内置有蓝牙传输模块,无人机内置有与相应蓝牙传输模块配套使用以接收水文信息的蓝牙接收模块、以及与基站通信的无线通信模块。
参照图3,其中,步骤SB00所提及的若基站未完全接收所有水文信息采集模块所采集获取的水文信息,则统计获取未发送水文信息的水文信息采集模块所在位置的步骤可划分为步骤SBa0至步骤SBb0。
在步骤SBa0中,从第一数据库中查找出相应基站所需接收信息的所有水文信息采集模块。
在步骤SBb0中,基于基站理论所需接受的水文信息以及实际所接收到的水文信息,反向分析出未发送水文信息的水文信息采集模块并确定相应水文信息采集模块所在位置。
举例来说,假定一个基站对应甲、乙、丙三个水文信息采集模块,在相应基站接收到甲、乙所发送的信号时,可以确定丙为未发送水文信息的水文采集模块,而确定丙的位置可以通过以丙为查询对象,在第一数据库中查询出丙所处位置。
参照图4,其中,步骤SB00所提及的启动预设于基站的无人机飞往未发送水文信息的水文信息采集模块所在位置作现场的水文信息采集的步骤可划分为步骤SBA0至步骤SBC0。
在步骤SBA0中,获取未发送水文信息的水文信息采集模块所在位置。
在步骤SBB0中,规划路经所有未发送水文信息的水文信息采集模块所在位置并返回基站的最短路径.
具体来说,步骤SBB0所规划的最短路径是通过可视图法来实现,可视图法中,无人机用点来描述,障碍物用多边形描述。将起始点、目标点和各障碍物的各顶点行组合连接,要求起始点和障碍物各顶点之间、目标点和障碍物各顶点之间以及各障碍物顶点与顶点之间的连线均不能穿越障碍物,即直线是“可视的”,然后釆用某种优化算法搜索从起始点到目标点的最优路径,那么根据累加和比较这些直线的距离就可以获得从起始点到目标点的最短路径。
在步骤SBC0中,无人机沿最短路径逐一采集未发送水文信息的水文信息采集模块的水文信息。
其中,步骤SBC0所提及未发送水文信息的水文信息采集模块的水文信息主要是通过无人机通过内置的蓝牙接收模块与内置于水文信息采集模块的蓝牙传输模块匹配后,接收水文信息来获取的。
参照图5,另外,水文信息监控方法还包括设置于步骤SBB0以及步骤SBC0之间的步骤,具体步骤可划分为步骤Sa00、步骤Sb00、步骤Sc00、步骤Sd00,其中,步骤Sc00与步骤Sd00为并行步骤。
在步骤Sa00中,获取路经所有未发送水文信息的水文信息采集模块所在位置且返回基站的最短路径以及相应最短路径的距离。
在步骤Sb00中,将最短路径的距离与预设的无人机单位距离的耗电量的乘积,与预设的无人机预设最低电量之和作为无人机所需保持的电量。
举例来说,假定将最短路径的距离与预设的无人机单位距离的耗电量的乘积为100000mA,预设的无人机预设最低电量为1000mA,那么无人机所需保持的电量为11000mA,此处预设的无人机预设最低电量可以理解为无人机所必须保持的最低电量。
参照图6,其中,步骤Sb00所提及的预设的无人机单位距离的耗电量获取步骤可划分为步骤Sba0至步骤Sbc0。
在步骤Sba0中,获取无人机当前起飞的外界风量情况。
在步骤Sbb0中,从预设的存储有历史无人机在不同风量情况下的单位距离耗电量的第二数据库中,以无人机当前起飞的外界风量作为查询对象,查询获取无人机与当前起飞的外界风量情况一致且最临近一次的单位距离耗电量,同时查询出无人机最临近一次的单位距离耗电量。
在步骤Sbc0中,基于无人机与当前起飞的外界风量情况一致且最临近一次的单位距离耗电量、以及无人机最临近一次的单位距离耗电量,并应用权重公式预测分析出无人机本次起飞后的单位距离耗电量,具体权重公式如下:Z=A*P+B*Q,Z为无人机本次起飞后的单位距离耗电量,A为无人机与当前起飞的外界风量情况一致且最临近一次的单位距离耗电量,P为A的权重占比,B为无人机最临近一次的单位距离耗电量,Q为B的权重占比。
举例来说,假定无人机本次起飞所遇的风量为1级,从第二数据库中所查找出来的无人机起飞后遭遇1级风情况下的单位距离耗电量为25mA/米,
无人机与当前起飞的外界风量情况一致且最临近一次的单位距离耗电量为20mA/米,无人机最临近一次的单位距离耗电量为16mA/米,P为0.8,Q为0.2,那么Z为19.2mA/米。
在步骤Sc00中,若无人机所需保持的电量超过无人机当前的电量且低于无人机所能保持的最大电量,则将无人机所需保持的电量作为被减数,无人机当前的电量作为减数,获取无人机所需补充的电量,在无人机起飞前按照无人机所需补充的电量对无人机作补充充电。
举例来说,无人机当前的电量为8000mA,无人机所需保持的电量的电量为11000mA,因此无人机所需充电电量为3000mA。
在步骤Sd00中,若无人机所需保持的电量超过无人机所能保持的最大电量,则基于无人机所需保持的电量、未发送水文信息的水文信息采集模块所在位置、无人机单位距离的耗电量、以及所规划的最短路径分析确定无人机的充电策略,并控制无人机按照所规划路径行进的同时按照所分析确定的无人机充电策略对无人机充电,定义基站以及每个水文信息采集模块所在位置处均设置有供无人机充电现场充电的充电设备。
具体来说,供无人机充电现场充电的充电设备可以是无线充电器。
参照图7,其中,步骤Sd00所提及的分析确定无人机的充电策略的步骤可划分为步骤Sda0至步骤Sdc0。
在步骤Sda0中,以无人机按照当前电量与无人机预设最低电量的差值作为被除数,无人机单位距离的耗电量作为除数,分析出无人机当前电量所能持续飞行的距离。
在步骤Sdb0中,无人机通过预设于基站的充电站首先充满电,并基于无人机沿所规划最短路径到的每个未发送水文信息的水文信息采集模块位置的距离、以及无人机单位距离的耗电量,分析出无人机在离开基站后所到每个未发送水文信息的水文信息采集模块后的剩余电量以及返回基站时的剩余电量。
在步骤Sdc0中,若无人机至下个水文信息采集模块或返回基站时的剩余电量小于0时,则无人机在前一个水文信息采集模块将电量充至满足无人机沿最短路径返回基站的电量为止。
本发明实施例提供一种计算机可读存储介质,包括能够被处理器加载执行时实现如图1-图7任一种方法的程序。
所述计算机可读存储介质例如包括:U盘、移动硬盘、只读存储器(Read-OnlyMemory,ROM)、随机存取存储器(Random Access Memory,RAM)、磁碟或者光盘等各种可以存储程序代码的介质。
基于同一发明构思,本发明实施例提供一种水文信息监控系统,包括存储器、处理器,存储器上存储有可在所述处理器上运行实现如图1至图7任一种方法的程序。
所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,仅以上述各功能模块的划分进行举例说明,实际应用中,可以根据需要而将上述功能分配由不同的功能模块完成,即将装置的内部结构划分成不同的功能模块,以完成以上描述的全部或者部分功能。上述描述的系统,装置和单元的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。
在本申请所提供的几个实施例中,应该理解到,所揭露的系统,装置和方法,可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,模块或单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。
作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
另外,在本申请各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。上述集成的单元既可以采用硬件的形式实现,也可以采用软件功能单元的形式实现。
集成的单元如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本申请的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的全部或部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)或处理器(processor)执行本申请各个实施例所述方法的全部或部分步骤。而前述的存储介质包括:U盘、移动硬盘、只读存储器、随机存取存储器、磁碟或者光盘等各种可以存储程序代码的介质。
本具体实施方式的实施例均为本发明的较佳实施例,并非依此限制本发明的保护范围,故:凡依本发明的结构、形状、原理所做的等效变化,均应涵盖于本发明的保护范围之内。
- 一种水文信息监控方法、系统以及存储介质
- 一种防火门监控系统的巡检式监控方法、系统及存储介质