一种叉车运行启动控制方法
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及AGV转运车技术领域,特别涉及一种叉车运行启动控制方法。
背景技术
AGV又名无人搬运车,自动导航车,激光导航车。其显著特点的是无人驾驶,AGV上装备有自动导向系统,可以保障系统在不需要人工引航的情况下就能够沿预定的路线自动行驶,将货物或物料自动从起始点运送到目的地。AGV的另一个特点是柔性好,自动化程度高和智能化水平高,AGV的行驶路径可以根据仓储货位要求、生产工艺流程等改变而灵活改变,并且运行路径改变的费用与传统的输送带和刚性的传送线相比非常低廉。AGV一般配备有装卸机构,可以与其他物流设备自动接口,实现货物和物料装卸与搬运全过程自动化。此外, AGV还具有清洁生产的特点,AGV依靠自带的蓄电池提供动力,运行过程中无噪声、无污染,可以应用在许多要求工作环境清洁的场所。
目前AGV运行车的控制启动还均是通过人工进行调试检查和启动,由于在AGV车数量较多的厂区、或者中转站,通过人工进行控制启动和出现异常情况通过人工处理均效率极低,不能及时的启停AGV车。安全风险大,并且人力成本高。
发明内容
本发明针对提出了一种叉车运行启动控制方法,包括AGV端和与AGV端无线连接的监控端,所述AGV端包括多个AGV车,所述AGV车包括AGV车端、所述AGV车上设有定位单元、控制处理单元、无线数据传输终端和RF无线收发单元,所述AGV车端和定位单元均与控制处理单元的输入端连接,所述控制处理单元的输出端分别与无线数据传输终端和RF无线收发单元连接,所述监控端包括服务器、控制终端、移动终端和RF无线收发单元,所述RF无线收发单元用于接收AGV端上的多个AGV车上的RF无线收发单元发射传输的信息,所述RF 无线收发单元与所述控制终端双向连接,所述控制终端与所述服务器双向连接,所述移动终端与所述服务器无线连接,所述服务器通过互联网分别与所述AGV端的各个无线数据传输终端无线连接。
进一步,所述定位单元采用GPS模块和北斗定位模块。
进一步,所述无线数据传输终端采用4G DTU无线数据传输终端模块。
进一步,所述RF无线收发单元与监控端的RF无线收发单元采用E04-400M16S型RF无线配套的收发模块。
进一步,所述AGV端上个各个AGV车上的控制处理单元均采用80C51系列控制处理芯片。
进一步,所述控制终端为PC端,所述移动终端为智能手机或平板电脑。
进一步,一种叉车运行启动控制方法,具体按以下步骤执行:
S1:首先通过监控端的控制终端通过RF无线收发单元进行开机唤醒控制,通过安装在 AGV车上的控制处理单元接收信息然后控制AGV车端进行启动;
S2:通过AGV车端将运行状态信息发送给控制处理单元,然后通过无线数据传输终端对 AGV车端的运行状态信息实时的传输到服务器;
S3:通过控制终端在固定的位置实时的获取服务器内的信息进行AGV车的状态监控,同时也便于通过移动终端随时随地连接服务器查看AGV车的运行信息,当发生异常情况,及时的通过移动终端或者控制终端对AGV车进行紧急控制启停。
本发明的优点与积极效果在于:通过首先通过监控端的控制终端通过RF无线收发单元进行开机唤醒控制,通过安装在AGV车上的控制处理单元接收信息然后控制AGV车端进行启动;然后通过AGV车端将运行状态信息发送给控制处理单元,然后通过无线数据传输终端对 AGV车端的运行状态信息实时的传输到服务器;还可通过控制终端在固定的位置实时的获取服务器内的信息进行AGV车的状态监控,同时也便于通过移动终端随时随地连接服务器查看 AGV车的运行信息,当发生异常情况,及时的通过移动终端或者控制终端对AGV车进行紧急控制启停。本发明实时效率高,改变了传统的靠人力进行控制的弊端,避免了出现紧急情况来不及处理的问题。
附图说明
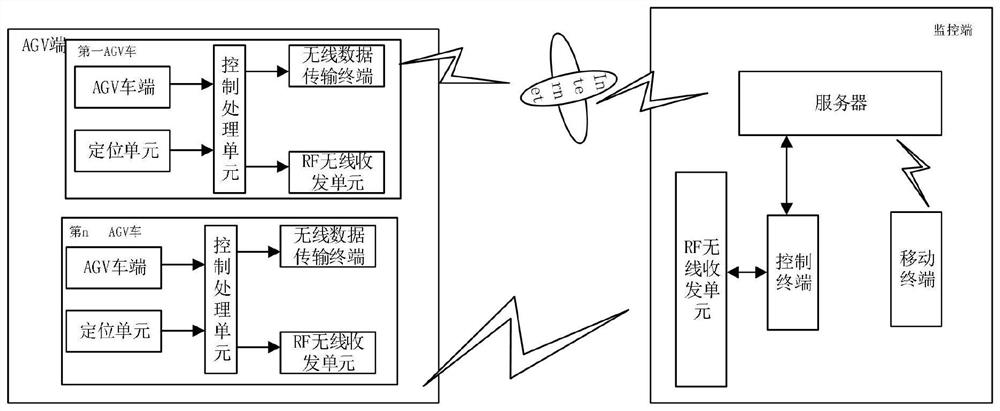
图1是本发明的方法系统结构图;
具体实施方式
以下将结合附图和具体实施例对本发明进行详细说明:
本实施例中,包括AGV端和与AGV端无线连接的监控端,所述AGV端包括多个AGV车,所述AGV车包括AGV车端、所述AGV车上设有定位单元、控制处理单元、无线数据传输终端和RF无线收发单元,所述AGV车端和定位单元均与控制处理单元的输入端连接,所述控制处理单元的输出端分别与无线数据传输终端和RF无线收发单元连接,所述监控端包括服务器、控制终端、移动终端和RF无线收发单元,所述RF无线收发单元用于接收AGV端上的多个AGV车上的RF无线收发单元发射传输的信息,所述RF无线收发单元与所述控制终端双向连接,所述控制终端与所述服务器双向连接,所述移动终端与所述服务器无线连接,所述服务器通过互联网分别与所述AGV端的各个无线数据传输终端无线连接。
本实施例中,所述定位单元采用GPS模块和北斗定位模块。
本实施例中,所述无线数据传输终端采用4G DTU无线数据传输终端模块。
本实施例中,所述RF无线收发单元与监控端的RF无线收发单元采用E04-400M16S型RF 无线配套的收发模块。
本实施例中,所述AGV端上个各个AGV车上的控制处理单元均采用80C51系列控制处理芯片。
本实施例中,所述控制终端为PC端,所述移动终端为智能手机或平板电脑。
本实施例中,一种叉车运行启动控制方法,具体按以下步骤执行:
S1:首先通过监控端的控制终端通过RF无线收发单元进行开机唤醒控制,通过安装在 AGV车上的控制处理单元接收信息然后控制AGV车端进行启动;
S2:通过AGV车端将运行状态信息发送给控制处理单元,然后通过无线数据传输终端对AGV车端的运行状态信息实时的传输到服务器;
S3:通过控制终端在固定的位置实时的获取服务器内的信息进行AGV车的状态监控,同时也便于通过移动终端随时随地连接服务器查看AGV车的运行信息,当发生异常情况,及时的通过移动终端或者控制终端对AGV车进行紧急控制启停。
以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。本发明未详细描述的技术、形状、构造部分均为公知技术。
- 一种叉车运行启动控制方法
- 一种电动叉车牵引系统运行控制方法及系统