交互系统及其控制方法、交互控制系统和车辆
文献发布时间:2023-06-19 11:22:42
技术领域
本申请涉及车辆技术领域,特别涉及一种交互系统及其控制方法、交互控制系统和车辆。
背景技术
相关技术中,车载机器人的控制器通常为独立的控制器,集成度较低,在开发过程中需要分别对车载机器人实体与车载机器人控制器投入资源进行设计,开发流程复杂且繁琐。
发明内容
有鉴于此,本申请的实施例提供了一种交互系统及其控制方法、交互控制系统和车辆。
本申请实施方式提供了一种交互系统,用于车载机器人,所述交互系统包括采集模块、第一通信模块和交互模块,其中,
所述采集模块用于采集驾驶员状态信息;
所述第一通信模块用于将所述驾驶员状态信息发送至交互控制系统,以及用于接收所述交互控制系统发送的第一控制指令;
所述交互模块用于根据所述第一控制指令与驾驶员进行交互。
在某些实施方式中,所述驾驶员状态信息包括驾驶员面部信息,所述采集模块包括摄像头单元,所述摄像头单元用于所述采集驾驶员面部信息。
在某些实施方式中,所述驾驶员状态信息包括驾驶员语音信息,所述采集模块包括麦克风单元,所述麦克风单元用于采集所述驾驶员语音信息。
在某些实施方式中,所述第一控制指令包括动作控制指令,所述交互模块用于根据所述动作控制指令与驾驶员进行交互。
本申请实施方式提供了一种交互控制系统,用于车辆,所述交互控制系统包括第二通信模块和处理模块,其中,
所述第二通信模块用于接收交互系统发送的驾驶员状态信息;
所述处理模块用于对所述驾驶员状态信息进行处理以生成相应的第一控制指令;
所述第二通信模块还用于将所述第一控制指令发送至所述交互系统。
在某些实施方式中,所述处理模块还用于对所述驾驶员状态信息进行处理以生成相应的第二控制指令,所述交互控制系统用于根据第二控制指令控制车载设备运行。
在某些实施方式中,所述交互控制系统还包括更新模块,所述更新模块用于根据更新指令对所述交互系统进行更新。
在某些实施方式中,所述交互控制系统还包括控制模块,所述控制模块用于控制所述交互系统的电源时序和逻辑状态。
本申请实施方式提供了一种交互系统的控制方法,所述控制方法包括如下步骤:
采集驾驶员状态信息;
将所述驾驶员状态信息发送至交互控制系统;
接收所述交互控制系统发送的第一控制指令;
根据所述第一控制指令与驾驶员进行交互。
本申请实施方式提供了一种车辆,所述车辆包括上述任一实施方式所述的交互系统和上述任一实施方式所述的交互控制系统。
本申请实施方式的交互系统及其控制方法、交互控制系统和车辆中,通过与交互控制系统进行通信,将驾驶员状态信息发送至交互控制系统并接收第一控制指令,并根据第一控制指令与驾驶员进行交互,能够在提高交互系统的集成度的同时实现交互功能,且提高集成度也能够节省开发成本和物料成本。
附图说明
本申请上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中:
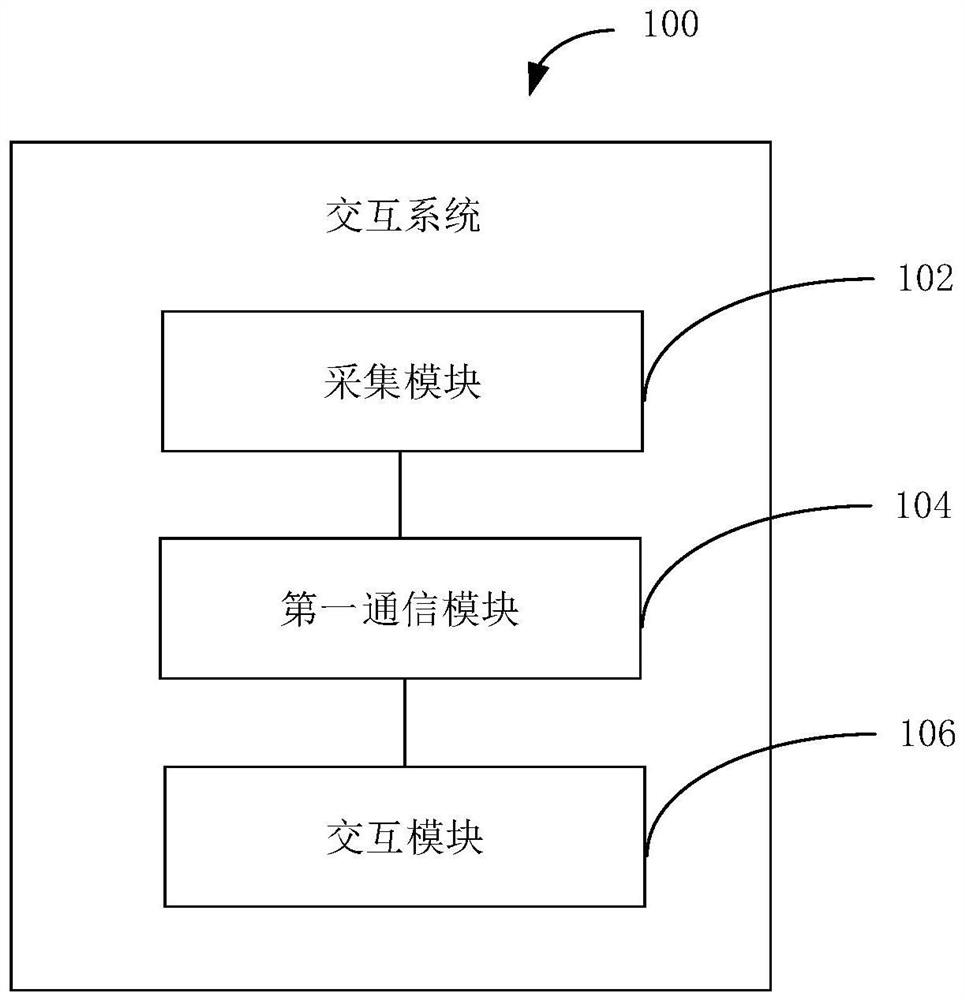
图1是本申请实施方式的交互系统的模块示意图;
图2是本申请实施方式的交互控制系统的模块示意图;
图3-6是本申请实施方式的交互系统与交互控制系统的交互示意图;
图7是本申请实施方式的交互系统的控制方法的流程示意图;
图8是本申请实施方式的交互控制系统的控制方法的流程示意图;
图9是本申请实施方式的交互控制系统的车辆的模块示意图。
具体实施方式
下面详细描述本申请的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本申请,而不能理解为对本申请的限制。
请一并参阅图1和图2,本申请实施方式提供了一种交互系统100,用于车载机器人,交互系统100包括采集模块102、第一通信模块104和交互模块106,其中,采集模块102用于采集驾驶员状态信息,第一通信模块104用于将驾驶员状态信息发送至交互控制系统110,以及用于接收交互控制系统110发送的第一控制指令,交互模块106用于根据第一控制指令与驾驶员进行交互。
具体地,相关技术中,车载机器人的控制器通常为独立的控制器,集成度较低,在开发过程中,需要分别对车载机器人实体与车载机器人控制器投入资源进行开发设计,导致开发成本较高。此外,车载机器人设立独立控制器,还需要修改车辆的CAN网络通信节点和通讯协议,进一步导致开发流程的复杂和繁琐。
本申请实施方式的交互系统100中,通过与交互控制系统110进行通信,将驾驶员状态信息发送至交互控制系统110并接收第一控制指令,并根据第一控制指令与驾驶员进行交互,能够在提高交互系统100的集成度的同时实现交互功能,且提高集成度也能够节省开发成本和物料成本。
需要说明地,交互控制系统110可以是车辆的娱乐系统,也可以是车辆的控制器总成,具体不做限定。
请参阅图1和图3,在某些实施方式中,驾驶员状态信息包括驾驶员面部信息,采集模块102包括摄像头单元1021,摄像头单元1021用于采集驾驶员面部信息。
具体地,采集模块102中的摄像头单元1021采集驾驶员面部信息,第一通信模块104将驾驶员面部信息发送至交互控制系统110,并接收交互控制系统110发送的第一控制指令,交互模块106根据第一控制指令与驾驶员进行交互。
例如,采集模块102中的摄像头单元1021采集驾驶员面部信息,第一通信模块104将驾驶员面部信息发送至交互控制系统110。交互控制系统110通过人脸识别算法推断驾驶员的表情为微笑,生成相应的第一控制指令。交互系统100接收交互控制系统110发送的第一控制指令,根据第一控制指令控制车载机器人与驾驶员进行交互。
又如,采集模块102中的摄像头单元1021采集驾驶员面部信息,第一通信模块104将驾驶员面部信息发送至交互控制系统110。交互控制系统110通过疲劳驾驶算法推断驾驶员当前状态为疲劳驾驶,生成相应的第一控制指令。交互系统100接收交互控制系统110发送的第一控制指令,根据第一控制指令控制车载机器人与驾驶员进行交互。
如此,交互系统100内无需单独开发控制器,通过与交互控制系统110进行通信,即能够在提高交互系统100的集成度的同时,确保交互功能的实现,且能够节省开发成本和物料成本。
请再次参阅图3,在某些实施方式中,驾驶员状态信息包括驾驶员语音信息,采集模块102包括麦克风单元1022,麦克风单元1022用于采集驾驶员语音信息。
具体地,麦克风单元1022采集驾驶员语音信息,第一通信模块104将驾驶员语音信息发送至交互控制系统110,并接收交互控制系统110发送的第一控制指令,交互模块106根据第一控制指令与驾驶员进行交互。
例如,麦克风单元1022采集驾驶员语音信息,第一通信模块104将驾驶员语音信息发送至交互控制系统110。交互控制系统110通过语音识别算法推断驾驶员语音信息的语义,生成相应的第一控制指令。交互系统100接收交互控制系统110发送的第一控制指令,根据第一控制指令控制车载机器人与驾驶员进行交互。
又如,麦克风单元1022采集驾驶员语音信息,摄像头单元1021采集驾驶员面部信息,第一通信模块104将驾驶员语音信息和驾驶员面部信息发送至交互控制系统110。交互控制系统110通过语音识别算法推断驾驶员语音信息的语义,以及通过人脸识别算法推断驾驶员的表情,生成相应的第一控制指令。交互系统100接收交互控制系统110发送的第一控制指令,根据第一控制指令控制车载机器人与驾驶员进行交互。
如此,交互系统100内无需单独开发控制器,通过与交互控制系统110进行通信,即能够在提高交互系统100的集成度的同时,确保交互功能的实现,且能够节省开发成本和物料成本。
需要说明地,麦克风单元可以是设置于交互系统100内的麦克风单元1022,也可以是设置于交互控制系统110的麦克风单元115。例如,请参阅图4和图5,麦克风单元为设置于交互控制系统110的麦克风单元115的情况下,麦克风单元115采集驾驶员语音信息,并发送至交互控制系统110。交互控制系统110通过语音识别算法推断驾驶员语音信息的语义,生成相应的第一控制指令。交互系统100接收交互控制系统110发送的第一控制指令,根据第一控制指令控制车载机器人与驾驶员进行交互。
在某些实施方式中,第一控制指令包括动作控制指令,交互模块106用于根据动作控制指令与驾驶员进行交互。
具体地,第一控制指令包括动作控制指令,动作控制指令用于控制车载机器人进行动作,例如旋转、点头、摇头、发出语音、更新车载机器人显示屏108中的显示画面等。
进一步地,可以将车载机器人显示屏108、动作控制电机、控制电源灯线路通过串行通信技术和信号线传送技术,例如POWER OVER COAX(PoC)技术等,连接至车载娱乐系统控制器中。如此,能够将相关电机控制信号由车载娱乐控制系统传输至车载机器人实体端,进而对车载机器人实体进行相应的控制。
在一些实施例中,麦克风单元1022采集驾驶员语音信息,第一通信模块104将驾驶员语音信息发送至交互控制系统110。交互控制系统110通过语音识别算法推断驾驶员语音信息的语义,生成旋转车载机器人实体的第一控制指令,或生成发出相应的语音进行对话的第一控制指令。交互系统100接收交互控制系统110发送的旋转车载机器人实体的第一控制指令,根据第一控制指令控制车载机器人进行旋转,或发出相应的语音与驾驶员进行对话。
在一些实施例中,麦克风单元1022采集驾驶员语音信息,摄像头单元1021采集驾驶员面部信息,第一通信模块104将驾驶员语音信息和驾驶员面部信息发送至交互控制系统110。交互控制系统110通过语音识别算法推断驾驶员语音信息的语义,以及通过人脸识别算法推断驾驶员的表情,生成语音提示“请停车休息”的第一控制指令。交互系统100接收交互控制系统110发送的第一控制指令,并根据第一控制指令控制车载机器人通过扬声器单元113发出语音提示“请停车休息”。
如此,交互系统100内无需单独开发控制器,通过与交互控制系统110进行通信,即能够在提高交互系统100的集成度的同时,确保交互功能的实现,且能够节省开发成本和物料成本。
本申请实施方式提供了一种交互控制系统110,用于车辆,交互控制系统110包括第二通信模块112和处理模块114,其中,第二通信模块112用于接收交互系统100发送的驾驶员状态信息,处理模块114用于对驾驶员状态信息进行处理以生成相应的第一控制指令,第二通信模块112还用于将第一控制指令发送至交互系统100。
本申请实施方式的交互控制系统110中,通过与交互系统100进行通信,接收驾驶员状态信息并进行处理,生成相应的第一控制指令并发送至交互系统100,使得交互系统100根据第一控制指令与驾驶员进行交互。如此,能够在提高交互系统100的集成度的同时实现交互功能,且提高集成度也能够节省开发成本和物料成本。
在某些实施方式中,处理模块114还用于对驾驶员状态信息进行处理以生成相应的第二控制指令,交互控制系统110用于根据第二控制指令控制车载设备运行。
具体地,处理模块114还用于对驾驶员状态信息进行处理以生成相应的第二控制指令,第二控制指令用于对车载设备进行控制。也即是说,交互系统100采集驾驶员状态信息,驾驶员状态信息中包括驾驶员面部信息、语音信息中的至少一种。交互控制系统110的第二通信模块112接收交互系统100发送的驾驶员状态信息,处理模块114对驾驶员状态信息进行处理,生成相应的第二控制指令,交互控制系统110根据第二控制指令控制车载设备运行。
在一些实施例中,第二通信模块112接收交互系统100发送的驾驶员状态信息为“请把空调打开”,处理模块114对驾驶员状态信息进行处理,生成开启车载空调的第二控制指令,交互控制系统110根据第二控制指令控制车载空调的运行。
在另一些实施例中,第二通信模块112接收交互系统100发送的驾驶员面部信息,处理模块114对驾驶员面部信息进行处理,推断驾驶员的表情为微笑,则生成开启车内氛围灯的第二控制指令,交互控制系统110根据第二控制指令控制车内氛围灯的运行。
如此,交互系统100内无需单独开发控制器,通过与交互控制系统110进行通信,即能够在提高交互系统100的集成度的同时,确保交互功能的实现,优化用户体验。
在某些实施方式中,交互控制系统110还包括更新模块116,更新模块116用于根据更新指令对交互系统100进行更新。
具体地,更新模块116用于检测在车辆服务器端是否存在交互系统100的更新,在车辆服务器端存在更新的情况下,处理模块114生成更新指令,更新模块116根据更新指令对交互系统100进行更新。
例如,更新模块116检测到在车辆服务器端存在交互系统100程序的更新,则处理模块114生成更新指令,更新模块116根据更新指令从车辆服务器端下载更新文件,并通过串行通信技术将更新文件传输至交互系统100,以对交互系统100进行更新。
进一步地,更新模块116还可以用于检测交互系统100的程序是否存在故障,在交互系统100的程序存在故障的情况下,将故障情况传输至车辆服务端,以对故障情况进行进一步诊断。
如此,能够确保对交互系统100的更新和诊断,保障各交互功能能够无误实现,优化用户体验。
请参阅图3和图4,在某些实施方式中,交互控制系统110还包括控制模块111,控制模块111用于控制交互系统100的电源时序和逻辑状态。
具体地,可以将交互系统100中的电源时序控制和逻辑状态控制模块111集成到交互控制系统110中,由交互控制系统110控制交互系统100的电源时序和逻辑状态。
例如,将交互系统100中的微控制单元集成到车载娱乐系统的控制器中,由车载娱乐系统的控制器控制交互系统100的电源时序和逻辑状态。
如此,能够进一步提高交互系统100的集成度,降低生产成本。
请参阅图5和图6,在另一些实施例中,控制模块也可以是设置于交互系统100中的控制模块101,如此,能够实现对交互系统100的电源时序和逻辑状态的诊断,实现电源时序的自动更改,提高交互系统100的运作稳定性。
请参阅图7,本申请实施方式还提供了一种交互系统100的控制方法,控制方法包括如下步骤:
S11:采集驾驶员状态信息;
S12:将驾驶员状态信息发送至交互控制系统110;
S13:接收交互控制系统110发送的第一控制指令;
S14:根据第一控制指令与驾驶员进行交互。
本申请实施方式的交互系统100的控制方法可以由交互系统100实现。S11可以由采集模块102实现,S12和S13可以由第一通信模块104实现,S14可以由交互模块106实现。或者说,采集模块102用于采集驾驶员状态信息。第一通信模块104用于将驾驶员状态信息发送至交互控制系统110,以及用于接收交互控制系统110发送的第一控制指令。交互模块106用于根据第一控制指令与驾驶员进行交互。
本申请实施方式的交互系统100的控制方法,具体实施例可参考前述交互系统100的实施例,此处不再赘述。
本申请实施方式的交互系统100的控制方法中,通过与交互控制系统110进行通信,将驾驶员状态信息发送至交互控制系统110并接收第一控制指令,并根据第一控制指令与驾驶员进行交互,能够在提高交互系统100的集成度的同时实现交互功能,且提高集成度也能够节省开发成本和物料成本。
请参阅图8,本申请实施方式还提供了一种交互控制系统110的控制方法,控制方法包括如下步骤:
S21:接收交互系统100发送的驾驶员状态信息;
S22:对驾驶员状态信息进行处理以生成相应的第一控制指令;
S23:将第一控制指令发送至交互系统100。
本申请实施方式的交互控制系统110的控制方法可以由交互控制系统110实现。S21可以由第二通信模块112实现,S22可以由处理模块114实现,S23可以由第二通信模块112实现。或者说,第二通信模块112用于接收交互系统100发送的驾驶员状态信息,以及用于将第一控制指令发送至交互系统100。处理模块114用于对驾驶员状态信息进行处理以生成相应的第一控制指令。
本申请实施方式的交互控制系统110的控制方法,具体实施例可参考前述交互控制系统110的实施例,此处不再赘述。
本申请实施方式的交互控制系统110的控制方法中,通过与交互系统100进行通信,接收驾驶员状态信息并进行处理,生成相应的第一控制指令并发送至交互系统100,使得交互系统100根据第一控制指令与驾驶员进行交互。如此,能够在提高交互系统100的集成度的同时实现交互功能,且提高集成度也能够节省开发成本和物料成本。
请参阅图9,本申请实施方式还提供了一种车辆10,车辆10包括上述任一实施方式的交互系统100和上述任一实施方式的交互控制系统110。
本申请实施方式的车辆10中,包括上述任一实施方式的交互系统100和上述任一实施方式的交互控制系统110。交互控制系统110通过与交互系统100进行通信,接收驾驶员状态信息并进行处理,生成相应的第一控制指令并发送至交互系统100,使得交互系统100根据第一控制指令与驾驶员进行交互。如此,能够在提高交互系统100的集成度的同时实现交互功能,且提高集成度也能够节省开发成本和物料成本。
本申请实施方式还提供了一个或多个存储有计算机程序的非易失性计算机可读存储介质,当计算机程序被一个或多个处理器执行时,实现上述任一实施方式的交互系统100的控制方法和交互控制系统110的控制方法。
本申请实施方式还提供了一种车辆。车辆包括存储器及一个或多个处理器,一个或多个程序被存储在存储器中,并且被配置成由一个或多个处理器执行。程序包括用于执行上述任意一项实施方式所述的交互系统100的控制方法和交互控制系统110的控制方法的指令。
处理器可用于提供计算和控制能力,支撑整个车辆的运行。车辆的存储器为存储器其中的计算机可读指令运行提供环境。
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,程序可存储于一非易失性计算机可读存储介质中,该程序在执行时,可包括如上述各方法的实施例的流程。其中,存储介质可为磁碟、光盘、只读存储记忆体(Read-Only Memory,ROM)等。
以上实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。
- 交互系统及其控制方法、交互控制系统和车辆
- 一种轨道交通车辆的控制系统与人机交互系统的通讯装置