一种在陀螺双五表配置下的故障判别方法
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及惯性导航技术领域,尤其涉及一种在陀螺双五表配置下的故障判别方法。
背景技术
为了提高捷联惯组的可靠性,目前有效的办法是采用冗余技术。载人运载火箭需要满足更高的可靠性和安全性要求,因此冗余方案覆盖故障度数较其他型号要高,必须保证惯组能在两度及以上的故障情况下能可靠工作。
现有的惯组导航,不能满足二度及二度以上单表级故障的情况下可靠工作的需求,不能有效利用冗余信息,故障的适应程度有限,系统发生误判和漏判的概率较大。
发明内容
本发明的主要目的在于克服现有技术的缺点与不足,提供一种在陀螺双五表配置下的故障判别方法,通过设置双惯组,在每个惯组中分别进行故障检测,在惯组出现二度故障时进行惯组间的故障检测,从而确定出现二度故障的惯组对应的正交表是否损坏,在损坏时进行故障隔离,能够有效利用冗余信息,满足二度及二度以上单表级故障的情况下可靠工作的需求,最大限度地对故障进行检出,同时避免误判和漏判的发生。
本发明提供了一种在陀螺双五表配置下的故障判别方法,所述双惯组包括第一惯组和第二惯组,所述第一惯组和所述第二惯组均包括五个陀螺表Wx、Wy、Wz、Ws、Wt,其中陀螺表Wx、Wy、Wz成正交安装构成正交表,陀螺表Ws、Wt为空间斜置安装,所述方法包括以下步骤:
S1:在所述第一惯组和所述第二惯组内,分别进行故障表一致性检测,并执行故障表隔离操作;
S2:判断所述第一惯组和所述第二惯组内是否存在陀螺出现二度故障的惯组;
S3:若存在陀螺出现二度故障的惯组,则执行惯组间的陀螺故障判别和定位方法,检测所述陀螺出现二度故障的惯组的对应正交表是否故障。
优选地,在所述第一惯组和第二惯组中,分别采用的判别公式和一致性故障判别定位表相同或者不同。
优选地,在所述第一惯组中,采用以下判别公式进行故障表检测:
公式1:
公式2:
公式3:
公式4:
公式5:
其中,
优选地,根据判别公式1-5以及陀螺角速度一致性故障判别定位表判别第一惯组中的故障表,所述陀螺角速度一致性故障判别定位表为:
其中,表中“√”表示公式成立;“×”表示公式不成立。
优选地,在所述第二惯组中,采用以下判别公式进行故障表检测:
公式6:
公式7:
公式8:
公式9:
公式10:
其中,
优选地,根据判别公式6-10以及陀螺角速度一致性故障判别定位表判别第二惯组中的故障表,所述陀螺角速度一致性故障判别定位表为:
其中,表中“√”表示公式成立;“×”表示公式不成立。
优选地,所述执行惯组间的陀螺故障判别和定位方法,包括采用以下公式进行判别:
公式11:
公式12:
公式13:
其中,δθ
优选地,根据以下真值表检测所述陀螺出现二度故障的惯组的对应正交表是否故障:
优选地,对角速度一致性判别进行滚动累加,累加周期为Δt3=25·τ,τ为控制周期;故障门限根据陀螺仪的测量误差σ来确定,取值范围为[6σ,9σ]。
优选地,记录陀螺表和加速度表的连续故障次数,对连续故障次数超过预定门限的陀螺表和加速度表进行隔离。
有益效果:通过配置陀螺双五表惯组,在每个惯组中分别进行故障检测,在惯组出现陀螺表二度故障时进行惯组之间的故障检测,从而确定出现二度故障的惯组对应的正交表是否损坏,在损坏时进行故障隔离,能够有效利用冗余信息,满足二度及二度以上单表级故障的情况下可靠工作的需求,最大限度地对故障进行检出,同时避免误判和漏判的发生。
通过参照以下附图及对本发明的具体实施方式的详细描述,本发明的特征及优点将会变得清楚。
附图说明
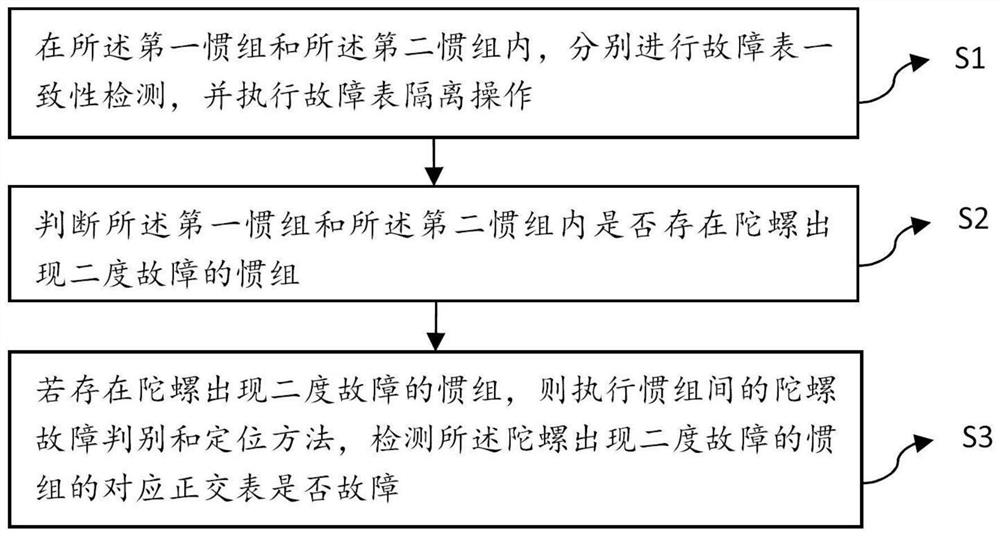
图1是陀螺双惯组的故障判别方法流程示意图;
图2是惯性仪表安装定向示意图;
图3是双惯组配置示意图。
具体实施方式
下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
图1是陀螺双惯组的故障判别方法流程示意图。如图1所示,本发明提供了一种在陀螺双五表配置下的故障判别方法,所述双惯组包括第一惯组和第二惯组,所述第一惯组和所述第二惯组均包括五个Wx、Wy、Wz、Ws、Wt,其中陀螺表Wx、Wy、Wz成正交安装构成正交表,陀螺表Ws、Wt为空间斜置安装,所述方法包括以下步骤:
S1:在所述第一惯组和所述第二惯组内,分别进行故障表一致性检测,并执行故障表隔离操作;
S2:判断所述第一惯组和所述第二惯组内是否存在陀螺出现二度故障的惯组;
S3:若存在陀螺出现二度故障的惯组,则执行惯组间的陀螺故障判别和定位方法,检测所述陀螺出现二度故障的惯组的对应正交表是否故障。
如图2和图3所示,本发明的双惯组为陀螺双五表配置冗余结构。在图2中,O-X1Y1Z1为箭体坐标系,其中OX1为纵轴,OY1为法向轴,OZ1为横向轴;O-XsYsZs为惯性组合坐标系。两套惯组并排安装,各单表敏感轴互相平行。
在图3中,五个陀螺Wx、Wy、Wz、Ws、Wt固定在同一基准面上。Wx、Wy、Wz分别沿OXs、OYs、OZs轴方向成正交安装,测量轴正向为箭头所指方向,Ws、Wt为空间斜置,测量轴具体指向可以由单机确定。
优选地,在所述第一惯组和第二惯组中,分别采用的判别公式和一致性故障判别定位表相同或者不同。
作为一个优选实施例,在所述第一惯组中,针对角速度信息,可以进行各表在正交轴投影合理性进行判别,角速度一致性判别采用以下判别公式进行:
公式1:
公式2:
公式3:
公式4:
公式5:
其中,
为降低高频干扰信号对故障诊断的影响,对角速度一致性判别进行滚动累加,累加周期为Δt3=25·τ(τ为控制周期20ms),累加时间段从开20ms中断以后开始,为防止长时间滚动累加误差造成影响,在允许起飞时刻进行一次清零,之后重新开始滚动累加。
优选地,根据判别公式1-5以及陀螺角速度一致性故障判别定位表判别第一惯组中的故障表,所述陀螺角速度一致性故障判别定位表为:
其中,表中“√”表示公式成立;“×”表示公式不成立。
第二惯组中采用的判别公式可以与第一惯组中采用的公式相同,优选地,在所述第二惯组中,采用以下判别公式进行故障表检测:
公式6:
公式7:
公式8:
公式9:
公式10:
其中,
优选地,根据判别公式6-10以及陀螺角速度一致性故障判别定位表判别第二惯组中的故障表,所述陀螺角速度一致性故障判别定位表为:
其中,表中“√”表示公式成立;“×”表示公式不成立。
如果通过公式判断出其中一个惯组陀螺出现二度故障,则可以通过以下公式11-13检测出现二度故障惯组的对应正交表是否损坏。具体公式如下:
公式11:
公式12:
公式13:
其中,δθ
优选地,根据以下真值表检测所述陀螺出现二度故障的惯组的对应正交表是否故障:
如果第一惯组、第二惯组都出现一致性故障,则用上述判断的结果,尽量选择相应的无故障的正交表进行导航计算。
上述公式中角速度一致性故障门限,可以通过理论计算和分析得到,一般情况下,预设的门限根据惯性测量器件的测量误差σ来确定。本实施例中,故障门限根据陀螺仪的测量误差σ来确定,取值范围为[6σ,9σ]。
例如:角速度相关故障门限考虑因素如下表所示:
陀螺仪角增量一致性门限值,主要考虑陀螺仪零位误差、比例误差、采样误差、安装误差、惯组相对安装误差等因素,如果按9σ取值,则确定判断门限为:
ε
上述给出的例子只是简单的示例门限的确定方法,实际工程应用中,考虑的误差项可能更复杂,也可以采用均方和等其它数学处理方式进行计算。
优选地,记录陀螺表和加速度表的连续故障次数,对连续故障次数超过预定门限的陀螺表和加速度表进行隔离。
通过隔离惯组中故障的陀螺表,然后进行系统重构,选择无故障的正交表进行导航计算,在隔离并完成系统重构后,在故障适应能力上明显提高,可以应对二度及二度以上的单表故障。
本发明通过配置陀螺双五表惯组,在每个惯组中分别进行故障检测,在惯组陀螺出现二度故障时进行惯组间的故障检测,从而确定出现二度故障的惯组对应的正交表是否损坏,在损坏时进行故障隔离,能够有效利用冗余信息,满足二度及二度以上单表级故障的情况下可靠工作的需求,最大限度地对故障进行检出,同时避免误判和漏判的发生。
以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是在本发明的构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。
- 一种在陀螺双五表配置下的故障判别方法
- 一种在五个陀螺仪配置下的一致性故障诊断方法