一种智能炒菜机器人用搅拌装置
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及炒菜机器人技术领域,特别涉及一种智能炒菜机器人用搅拌装置。
背景技术
炒菜机器人是一台无需人工看管,将准备好的主料、配料、佐料全部一次性投入,设定程序后,自动热油、自动翻炒,自动控制火候,无需经验即可自动烹饪的一台智能化设备。智能自动炒菜机不仅能自动炒、煎、烹、炸、爆、焖、蒸、煮、烙、炖、煲等一锅多用的功能,轻松实现了炒菜过程的自动化和趣味化,只需手指轻轻触摸,就可以享受到世界各地的地道美食,真正做到了烹饪过程无油烟、省时、省力、不粘、不糊、不溢锅、锅体自动密封保鲜、营养菜肴美味,即保持了中国菜肴的传统工艺及色泽、又使炒制的菜肴鲜嫩味美,营养丰富。
炒菜机器人一般用安装在锅盖上的搅拌机构实现食材的翻炒,在食物倒入锅具中后,关上锅盖开启搅拌机构,实现食材的不停翻炒,但是传统的搅拌机构在运行过程中,如需打开锅盖进行加水,必须进行断电操作,否则容易出现安全隐患,导致在食物加工过程中,不方便加水,并且传统的搅拌机构只能提供不停搅拌翻炒的功能,搅拌叶倾角不能调节,对于有些食材在搅拌过程中容易出现被搅拌叶推着移动的现象,导致食材堆积,受热不够均匀,影响食物的口感。
发明内容
本发明的目的就在于为了解决上述炒菜机器人在炒菜过程中,不方便加水,以及食材容易被搅拌叶堆积,影响受热从而导致食物口感较差的问题而提供一种智能炒菜机器人用搅拌装置,具有可在翻炒过程中,不打开锅盖进行加水,安全性高,使用方便,搅拌叶带有凹口以及可以调节倾角,防止食材堆叠,加工的食物口感更好的优点。
本发明通过以下技术方案来实现上述目的,一种智能炒菜机器人用搅拌装置,包括安装在锅盖上的搅拌机构,所述锅盖上安装有把手,所述搅拌机构包括搅拌杆和搅拌叶组成,其中所述搅拌杆空心设置,内部安装有软管,所述软管通过转动安装在所述搅拌杆底端的滤网口管道连接,所述搅拌叶转动连接所述搅拌杆的外壁,且通过调节电机驱动,所述搅拌叶上还安装有压力传感器,通过所述压力传感器采集的信号,开启所述调节电机,从而驱动所述搅拌叶倾斜,调节搅拌阻力。
优选的,所述调节电机安装在搅拌杆的内部,调节电机的电机轴上安装旋转轴,所述旋转轴通过连接板与搅拌叶端部连接。
优选的,所述搅拌叶上设置有凹口,且搅拌叶为双层结构,中部设有活动槽,活动槽的内部安装有活动挡板,通过调节活动挡板遮挡凹口。
优选的,所述锅盖的中心安装有电机箱,电机箱内部安装有驱动搅拌杆的搅拌电机。
优选的,所述搅拌杆的顶部安装有从动齿轮,搅拌电机的电机轴上安装有主动齿轮,主动齿轮与从动齿轮啮合。
优选的,所述搅拌杆的顶端开口设置,软管从搅拌杆的顶端伸出。
与现有技术相比,本发明的有益效果是:
1、通过设置空心的搅拌杆,再由软管连接至搅拌杆的底端,方便在翻炒的时候不打开锅盖即可加水,增加使用的安全性,而且软管藏设在搅拌杆的内部,不易损坏,可以受到良好的保护作用。
2、通过在搅拌机构的搅拌叶上安装压力检测装置,可以采集搅拌叶收到的压力,调节搅拌叶的倾角,从而适应不同食材的翻炒,在搅拌叶上设置凹口,凹口可通过活动挡板选择性进行阻挡,可根据使用情况,选择合适的搅拌叶翻炒食材,满足食物加工需求。
附图说明
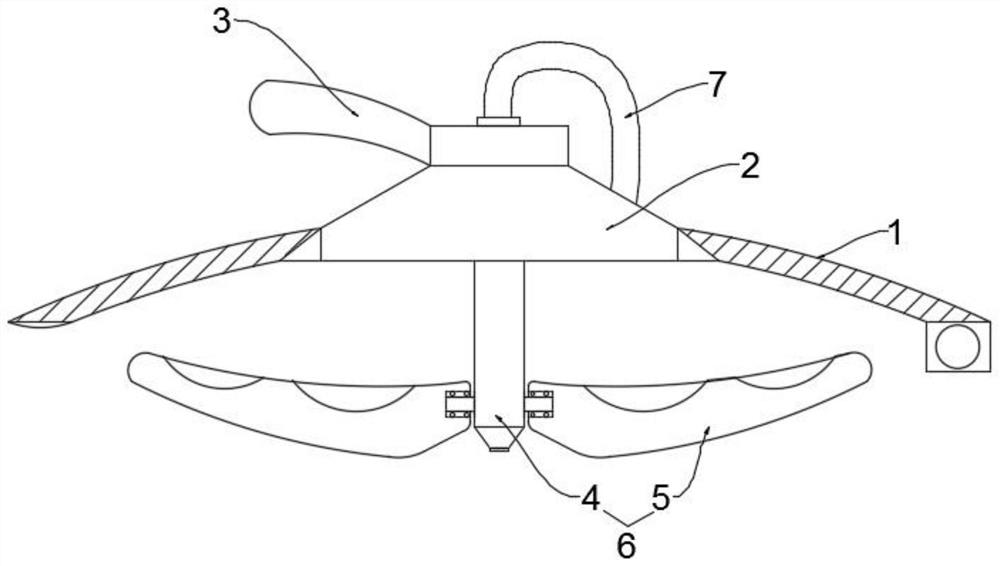
图1为本发明的整体装置结构示意图。
图2为本发明的搅拌叶安装结构示意图。
图3为本发明的活动挡板安装结构示意图。
图4为本发明的搅拌杆内部结构示意图。
图中:1、锅盖,2、电机箱,3、把手,4、搅拌杆,5、搅拌叶,6、搅拌机构,7、软管,8、凹口,9、活动挡板,10、压力传感器,11、旋转轴,12、连接板,13、调节电机,14、活动槽,15、滤网口,16、从动齿轮,17、主动齿轮,18、搅拌电机。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1和图4所示,一种智能炒菜机器人用搅拌装置,包括安装在锅盖1上的搅拌机构6,锅盖1上安装有把手3,搅拌机构6包括搅拌杆4和搅拌叶5组成,其中搅拌杆4空心设置,内部安装有软管7,软管7通过转动安装在搅拌杆4底端的滤网口15管道连接,搅拌叶5转动连接搅拌杆4的外壁,且通过调节电机13驱动,搅拌叶5上还安装有压力传感器10,通过压力传感器10采集的信号,开启调节电机13,从而驱动搅拌叶5倾斜,调节搅拌阻力,搅拌机构6安装在锅盖1上,盖上锅盖1即可方便搅拌机构6接触食材,搅拌机构6工作是由搅拌杆4驱动搅拌叶5完成的,搅拌杆4空心,从而可以通过软管7顺着搅拌杆4连接搅拌杆4底端的滤网口15,滤网口15与搅拌杆4转动连接,即使搅拌杆4旋转,也不会影响到软管7,这样在炒菜过程中,可以直接通过软管7进行加水,无需打开锅盖1,使用起来更加方便安全,搅拌叶5可以通过调节电机13改变倾角,压力传感器10采集到搅拌叶5的阻力过大时,说明食材堆积在搅拌叶5的途经方向,可以通过改变倾角,使得搅拌叶5将堆积的食材搅散,防止食材受热不均匀影响口感。
如图2和图3所示,调节电机13安装在搅拌杆4的内部,调节电机13的电机轴上安装旋转轴11,旋转轴11通过连接板12与搅拌叶5端部连接,搅拌叶5上设置有凹口8,且搅拌叶5为双层结构,中部设有活动槽14,活动槽14的内部安装有活动挡板9,通过调节活动挡板9遮挡凹口8,凹口8可用活动挡板9选择性阻挡,当翻炒易碎食材时,可将凹口8用活动挡板9遮上,防止食材被搅碎,在翻炒不易碎食材时,将活动挡板9按下,露出凹口8,防止食材堆积在一起。
锅盖1的中心安装有电机箱2,电机箱2内部安装有驱动搅拌杆4的搅拌电机18,搅拌杆4的顶部安装有从动齿轮16,搅拌电机18的电机轴上安装有主动齿轮17,主动齿轮17与从动齿轮16啮合,搅拌杆4的顶端开口设置,软管7从搅拌杆4的顶端伸出,搅拌电机18和搅拌杆4之间采用齿轮传动的方式,不影响软管7从搅拌杆4穿出,而且在搅拌杆4转动的时候更加的稳定。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种智能炒菜机器人用搅拌装置
- 一种智能炒菜机用的搅拌装置