位置推定装置和位置推定方法
文献发布时间:2023-06-19 11:26:00
技术领域
本发明涉及位置推定装置和位置推定方法。
背景技术
以往,已知有使用光学编码器等位置传感器来推定马达的转子的旋转位置的方法,但为了马达的小型化及低成本化,谋求不使用位置传感器来推定马达的转子的旋转位置的方法。在专利文献1中,公开了不使用位置传感器来推定马达的转子的旋转位置的方法。
现有技术文献
专利文献
专利文献1:日本国专利公报:专利第6233532号公报
发明内容
发明要解决的课题
然而,在不使用位置传感器来推定转子的旋转位置的情况下,在转子角小于1周的范围内,有时无法推定转子的旋转位置。
鉴于上述情况,本发明的目的在于提供一种即使在转子角小于1周的情况下,也能够推定转子的旋转位置的位置推定装置和位置推定方法。
用于解决课题的手段
本发明的一方式是位置推定装置,具有:特征量计算部,其在转子角小于1周的范围内取得转子的3处以上的磁场强度的检测值,从预先确定为所述转子的极对编号的多个分区中,根据所述磁场强度的检测值来选择所述分区,根据与选择出的所述分区对应的所述磁场强度的检测值的组合,计算所述磁场强度的波形的多个特征量;以及推定部,其按与选择出的所述分区对应起来的段,判定预先学习到的所述多个特征量的大小关系与计算出的所述多个特征量的大小关系是否一致,将与所述大小关系一致的所述段对应起来的所述极对编号推定为所述转子的旋转位置。
本发明的一方式是位置推定方法,其由位置推定装置执行,所述位置推定方法包括:在转子角小于1周的范围内取得转子的3处以上的磁场强度的检测值,从预先确定为所述转子的极对编号的多个分区中,根据所述磁场强度的检测值来选择所述分区,根据与选择出的所述分区对应的所述磁场强度的检测值的组合,计算所述磁场强度的波形的多个特征量的步骤;以及按与选择出的所述分区对应起来的段,判定预先学习到的所述多个特征量的大小关系与计算出的所述多个特征量的大小关系是否一致,将与所述大小关系一致的所述段对应起来的所述极对编号推定为所述转子的旋转位置的步骤。
发明效果
根据本发明,即使在转子角小于1周的情况下,也能够推定转子的旋转位置。
附图说明
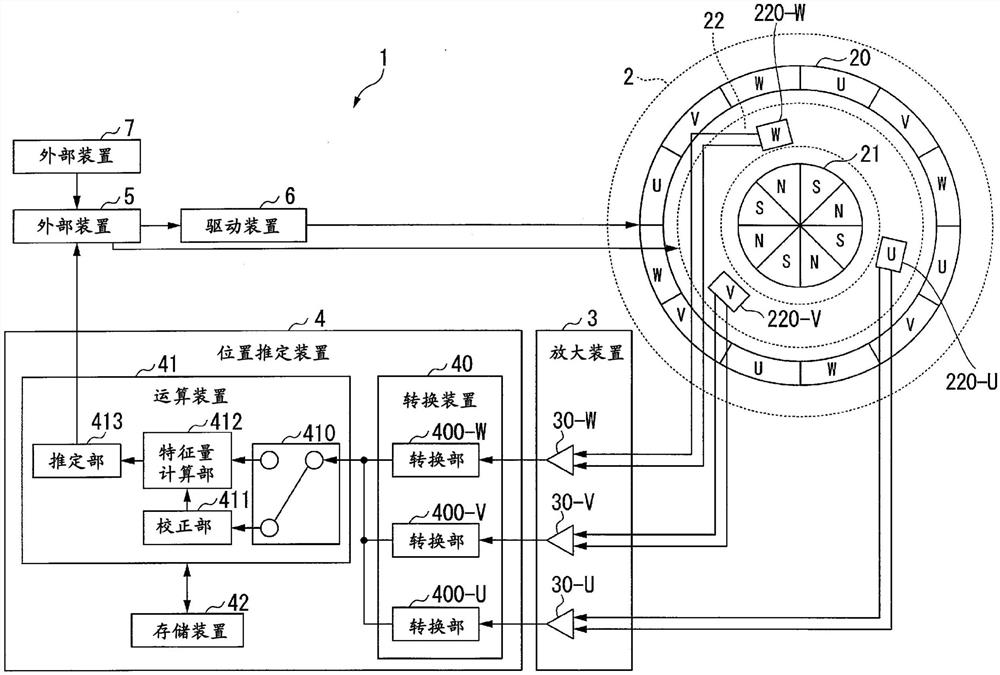
图1是表示第一实施方式中的马达单元的结构的例子的图。
图2是表示第一实施方式中的极对编号、分区(section)与段(segment)的对应关系的例子的图。
图3是表示第一实施方式中的磁场强度的波形的学习值的例子的图。
图4是表示第一实施方式中的校正波形的学习值的例子的图。
图5是表示第一实施方式中的校正波形的特征点的例子的图。
图6是表示第一实施方式中的交点的计算处理的例子的流程图。
图7是表示第一实施方式中的大小比较处理的例子的流程图。
图8是表示第一实施方式中的极对编号的计算处理的例子的流程图。
图9是表示第二实施方式中的马达单元的结构的例子的图。
图10是表示第二实施方式中的波形的特征点的检测值的例子的图。
图11是表示第二实施方式中的波形的最大值及最小值的学习值的例子的图。
图12是表示第二实施方式中的波形的交点的学习值的例子的图。
图13是表示第二实施方式中的检测值的取得处理的例子的流程图。
图14是表示第二实施方式中的极对编号的计算处理的例子的流程图。
图15是表示第三实施方式中的波形的特征点的检测值的例子的图。
具体实施方式
参照附图对本发明的实施方式进行详细说明。
(第一实施方式)
图1是表示马达单元1的结构的例子的图。马达单元1是推定马达的转子的旋转位置的系统。马达单元1具有:马达2、放大装置3、位置推定装置4、控制装置5以及驱动装置6。
马达2是电动机,例如是无刷马达、步进马达。
马达2可以是内转子型马达,也可以是外转子型马达。作为一例,图1所示的马达2是内转子型马达。马达2具有:定子20、转子21以及检测装置22。
定子20具有U相、V相以及W相的多个槽的绕组。在图1中,定子20具有4个槽的U相的绕组、4个槽的V相的绕组、4个槽的W相的绕组的共计12个槽的绕组。从驱动装置6向定子20输入相位每次错开120度的三相电流。定子20通过输入到U相、V相以及W相的各绕组的三相电流,使转子21以及检测装置22的位置产生磁场。
转子21通过接受定子20的磁力而绕中心轴旋转。转子21具有1个以上的磁极对(N极以及S极)。在图2中,作为一例,转子21具有4个磁极对。转子21通过磁极对从定子20接受磁力而旋转。对磁极对分配有极对编号。极对编号与分区和段相对应。
图2是表示极对编号、分区与段的对应关系的例子的图。极对编号与分区编号组相对应。分区编号的个数与包含检测装置22的3个传感器220的输出信号的大小关系和中间信号的正负(零交叉)的12种逻辑的数量相等。在图2中,极对编号“0”与从“0”到“11”的分区编号相对应。段编号是表示转子21的机械角的绝对值的固有编号。例如,极对编号“0”的分区编号“0”到“11”与段编号“0”到“11”相对应。例如,极对编号“1”的分区编号“0”到“11”与段编号“12”到“23”相对应。表示图2所示的对应关系的数据表例如预先存储在存储装置42中。
检测装置22是检测磁场强度的装置。检测装置22检测转子21附近的3处以上的磁场强度。检测装置22具有3个以上的磁场传感器。
在图1中,检测装置22具有:传感器220-U、传感器220-V以及传感器220-W。磁场传感器例如是霍尔元件、线性霍尔IC(integrated circuit)、磁阻传感器。在本实施方式中,对磁场传感器是霍尔元件进行说明。
传感器220-U是检测U相的磁场强度的传感器。传感器220-U将表示U相的磁场强度的差动信号即U相差动信号输出到放大装置3。传感器220-V是检测V相的磁场强度的传感器。传感器220-V将表示V相的磁场强度的差动信号即V相差动信号输出到放大装置3。传感器220-W是检测W相的磁场强度的传感器。传感器220-W将表示W相的磁场强度的差动信号即W相差动信号输出到放大装置3。
放大装置3是对差动信号的波形的振幅进行放大的装置。放大装置3具有:差动放大器30-U、差动放大器30-V以及差动放大器30-W。差动放大器30-U通过对U相差动信号执行放大处理,来生成模拟的U相信号Hu。差动放大器30-V通过对V相差动信号执行放大处理,来生成模拟的V相信号Hv。差动放大器30-W通过对W相差动信号执行放大处理,来生成模拟的W相信号Hw。
位置推定装置4是推定马达的转子的旋转位置的信息处理装置。位置推定装置4从放大装置3取得模拟的U相信号Hu、模拟的V相信号Hv以及模拟的W相信号Hw。位置推定装置4计算出U相信号Hu、V相信号Hv、W相信号Hw的各波形的多个特征量。位置推定装置4根据计算出的各波形的多个特征量,来推定马达2的转子21的旋转位置。位置推定装置4将旋转位置的推定结果(极对编号)输出到控制装置5。
控制装置5是生成控制信号的信息处理装置。控制装置5根据指示信号来生成控制信号。控制信号例如是表示与所指示的旋转方向(CW:clockwise、CCW:counterclockwise)对应的寄存器值的信号、表示从驱动装置6输出到定子20的电流的电流值的信号。控制信号例如也可以是供给到马达2的检测装置22的电源的电流信号。控制装置5通过对供给到检测装置22的电源的电流量进行控制,能够对各传感器220的电源进行控制。
驱动装置6是驱动马达的转子的装置。从控制装置5向驱动装置6输入控制信号。驱动装置6将由控制信号表示的电流值的三相电流输入到定子20的各绕组。驱动装置6通过向定子20的各绕组输入三相电流,能够使转子21旋转。详细情况在后面进行描述,但在第一实施方式中,在驱动装置6没有向定子20的各绕组输入三相电流的状态下进行转子21的位置推定。即,在第一实施方式中,位置推定装置4推定停止中的转子21的旋转位置。此外,位置推定装置4也可以推定旋转中的转子21的旋转位置。
外部装置7是生成转子的旋转方向以及转速等指示信号的信息处理装置。外部装置7将指示信号输出到控制装置5。
接着,对位置推定装置4的结构例的详细情况进行说明。
位置推定装置4具有:转换装置40、运算装置41和存储装置42。转换装置40是将模拟信号转换为数字信号的装置。转换装置40具有:转换部400-U、转换部400-V和转换部400-W。
转换部400是将模拟信号转换为数字信号的设备。转换部400-U将从差动放大器30-U取得的模拟的U相信号转换为数字的U相信号。转换部400-V将从差动放大器30-V取得的模拟的U相信号转换为数字的V相信号。转换部400-W将从差动放大器30-W取得的模拟的W相信号转换为数字的V相信号。
运算装置41是执行运算处理的装置。运算装置41的一部分或全部通过CPU(Central Processing Unit:中央处理器)等处理器执行在存储器中展开的程序来实现。运算装置41的一部分或者全部例如也可以使用LSI(Large Scale Integration:大规模集成化)、ASIC(Application Specific Integrated Circuit:专用集成电路)等硬件来实现。
运算装置41具有:切换部410、校正部411、特征量计算部412以及推定部413。此外,由于以提高位置推定的精度为目的而具有校正部411,所以校正部411不是必须的结构。
切换部410将特征量计算部412和校正部411中的任一个与转换装置40连接。在推定部413根据未校正的波形来推定转子21的旋转位置的情况下,切换部410将从转换装置40取得的U相信号Hu、V相信号Hv以及W相信号Hw输出到特征量计算部412。
在推定部413根据校正后的波形(以下称为“校正波形”)推定转子21的旋转位置的情况下,切换部410将从转换装置40取得的U相信号Hu、V相信号Hv以及W相信号Hw输出到校正部411。校正部411对U相信号Hu、V相信号Hv以及W相信号Hw的各磁场强度的波形进行校正。由此,关于校正部411,与推定部413根据未校正的波形来推定转子21的旋转位置的精度相比,能够提高推定部413推定转子21的旋转位置的精度。
特征量计算部412取得转子21的3处以上的磁场强度的检测值。在推定部413根据未校正的波形来推定转子21的旋转位置的情况下,特征量计算部412从切换部410取得U相信号Hu、V相信号Hv以及W相信号Hw的各磁场强度的波形。在推定部413根据校正波形来推定转子21的旋转位置的情况下,特征量计算部412从校正部411取得U相信号Hu、V相信号Hv以及W相信号Hw的各磁场强度的校正波形。
推定部413按与所选择的分区对应起来的段,来判定预先学习到的多个特征量(各学习值)的大小关系与计算出的多个特征量(各推定值)的大小关系是否一致。推定部413将旋转位置的推定结果(极对编号)输出到控制装置5。
存储装置42例如优选是闪存、HDD(Hard Disk Drive:硬盘驱动器)等非易失性的记录介质(非暂时性的记录介质)。存储装置42也可以具有RAM(Random Access Memory:随机存取存储器)等易失性的记录介质。存储装置42存储程序、学习值等数据表。
接着,对学习动作进行说明。
图3是表示磁场强度的波形的学习值的例子的图。事先生成磁场强度的波形的学习值。例如在马达单元1出厂前实施波形的学习值的事先生成处理。例如,通过在将外部位置传感器与转子21连接的状态下使转子21以恒定速度旋转,检测从检测装置22输出的波形来进行波形的学习值的事先生成处理。
图3所示的波形是在波形的学习值的事先生成处理中转子21旋转的情况下的、与转子21的转子角对应的磁场强度的校正波形。表示各磁场强度的波形中的特征点(交点)的学习值与分区的对应关系的数据表例如预先存储在存储装置42中。
在图3中,作为各磁场强度的波形的学习值与分区的对应关系的例子,示出了U相信号Hu的波形的学习值、V相信号Hv的波形的学习值、W相信号Hw的波形的学习值与分区的对应关系。作为一例,作为正值的振幅的数字值表示N极的磁场强度的数字值。作为一例,作为负值的振幅的数字值表示S极的磁场强度的数字值。
图4是表示校正波形的学习值的例子的图。在推定部413执行位置推定之前生成磁场强度的校正波形的学习值。图4所示的校正波形是在校正波形的学习值的事先生成处理中转子21旋转的情况下的、与转子21的转子角对应的磁场强度的校正波形。表示各磁场强度的校正波形中的特征点(交点)的学习值与分区的对应关系的数据表例如预先存储在存储装置42中。在图4中,各磁场强度的波形被校正(三角波)。转子21的磁极是4极对,因此,从4种校正系数中使用适当的校正系数,由此,各磁场强度的波形的最大值和最小值的附近以波形的最大值和最小值的附近变得不平坦的方式加以尖头化。
在图4中,作为各磁场强度的校正波形的学习值与分区的对应关系的例子,示出了U相信号Hu的校正波形的学习值、V相信号Hv的校正波形的学习值、W相信号Hw的校正波形的学习值与分区的对应关系。作为一例,作为正值的振幅的数字值表示N极的磁场强度的数字值。作为一例,作为负值的振幅的数字值表示S极的磁场强度的数字值。
在推定部413根据校正波形来推定转子21的旋转位置的情况下,校正部411将各磁场强度的波形设为校正波形(三角波)。即,校正部411为了使各磁场强度的波形的最大值和最小值的附近变得不平坦,由于转子21的磁极是4极对,所以从4种校正系数中使用适当的校正系数,由此,使波形的最大值和最小值的附近尖头化。校正部411生成相同振幅的各磁场强度的校正波形。通过这些校正,校正波形的各特征点的识别性提高。
此外,校正部411例如也可以执行日本国公开公报特开2018-029469号公报、日本国公开公报特开2018-029470号公报、日本国公开公报特开2018-029471号公报中任一项所记载的校正步骤和温度补偿步骤中的至少一个。
接着,对位置推定装置4的动作例进行说明。
图5是表示校正波形的特征点的例子的图。在图5中,在转子21的旋转停止了的状态下,检测装置22通电。图5所示的附图标记“kT”表示校正波形中的检测值被特征量计算部412采样的时刻的转子21的转子角(旋转位置)。V相信号Hv的校正波形的采样点100的检测值输入到特征量计算部412。W相信号Hw的校正波形的采样点110的检测值输入到特征量计算部412。U相信号Hu的校正波形的采样点120的检测值输入到特征量计算部412。
特征量计算部412从预先决定为图2所示的极对编号的多个分区中,根据U相信号Hu、V相信号Hv以及W相信号Hw的各磁场强度的检测值来选择分区。在图5中,特征量计算部412根据采样点100的检测值、采样点110的检测值和采样点120的检测值的大小关系、采样点110的正负,来选择分区编号“8”。
特征量计算部412根据与所选择的分区对应的磁场强度的检测值的组合,计算出磁场强度的波形或校正波形的多个特征量。所谓多个特征量例如是磁场强度的波形或校正波形的各交点的推定值。
特征量计算部412根据检测值为第一大的采样点和第二大的采样点的组合,计算出磁场强度的波形或校正波形的特征量。在图5中,特征量计算部412根据分区编号“8”中的校正波形的检测值的大小关系,来组合采样点100和采样点110。根据采样点100和采样点110的组合,特征量计算部412计算出V相信号Hv和W相信号Hw的特征点210的推定值。特征点210的推定值是采样点100的检测值与采样点110的检测值的平均值。
特征量计算部412根据检测值为第二大的采样点和第三大的采样点的组合,计算出磁场强度的波形或校正波形的特征量。在图5中,特征量计算部412根据分区编号“8”中的校正波形的检测值的大小关系,来组合采样点110和采样点120。根据采样点110和采样点120的组合,特征量计算部412计算出U相信号Hu和W相信号Hw的特征点200的推定值。特征点200的推定值是采样点110的检测值和采样点120的检测值的平均值。
图6是表示交点的计算处理的例子的流程图。位置推定装置4例如以预先确定的周期来反复执行图6、图7以及图8的各流程图所示的动作。特征量计算部412从校正部411中取得校正了波形而得的U相信号Hu[kT]、V相信号Hv[kT]以及W相信号Hw[kT]来作为各磁场强度的检测值。特征量计算部412也可以从切换部410中取得未校正波形的U相信号Hu[kT]、V相信号Hv[kT]以及W相信号Hw[kT](步骤S101)。
特征量计算部412例如根据图3所示的数字值与分区的对应关系,根据各磁场强度的检测值计算出分区编号。例如,特征量计算部412根据图5所示的采样点100、采样点110以及采样点120的检测值中,计算出图3所示的分区编号“8”(步骤S102)。
特征量计算部412根据计算出的分区编号“Section”,如数式(1)那样计算临时的段编号“Nseg”。
Nseg=Np_tmp×Section…(1)
这里,极对编号“Np_tmp”的初始值是0。在图1所示的马达2中,如图2所示,极对编号是从0到3的编号(步骤S103)。
特征量计算部412将特征点200的推定值“Est_CP[Nseg]”的2倍值作为U相信号Hu[kT]以及W相信号Hw[kT]的波形的特征量,如数式(2)那样进行计算。即,特征量计算部412根据图5所示的采样点120的检测值和采样点110的检测值,将特征点200的推定值的2倍值作为磁场强度的波形的特征量,如数式(2)那样进行计算(步骤S104)。
2×Est_CP[Nseg]=(Hw[kT]+Hu[kT])…(2)
特征量计算部412将特征点210的推定值“Est_CP[Nseg+1]”的2倍值作为V相信号Hv[kT]以及W相信号Hw[kT]的波形的特征量,如数式(3)那样进行计算。即,特征量计算部412根据采样点120的检测值和采样点110的检测值,将特征点210的推定值的2倍值作为磁场强度的波形的特征量,如数式(3)那样进行计算。
2×Est_CP[Nseg+1]=(Hv[kT]+Hw[kT])…(3)
特征量计算部412计算2倍值的理由是为了防止有效数字丢失(步骤S105)。
推定部413取得临时的段编号“Nseg”的特征点200的学习值的2倍值(=2×Stu_CP[Nseg])。推定部413取得临时的段编号“Nseg+1”的特征点210的学习值的2倍值(=2×Stu_CP[Nseg+1](步骤S106)。
图7是表示大小比较处理的例子的流程图。位置推定装置4接着图6所示的交点的计算处理,执行大小比较处理。
推定部413判定特征点200的推定值的2倍值与特征点210的推定值的2倍值的大小关系。即,推定部413判定数式(4)是否成立。
2×Est_CP[Nseg]<2×Est_CP[Nseg+1]…(4)
推定部413判定特征点200的学习值的2倍值与特征点210的学习值的2倍值的大小关系。即,推定部413判定数式(5)是否成立。
2×Stu_CP[Nseg]<2×Stu_CP[Nseg+1]…(5)
推定部413判定特征点200的推定值的2倍值和特征点210的推定值的2倍值的大小关系与特征点200的学习值的2倍值和特征点210的学习值的2倍值的大小关系是否一致。例如,在图2、图4以及图5中,推定部413针对与图2中的分区编号“8”对应起来的段编号“8”、“20”“32”以及“44”,判定图4中相当于特征点200以及特征点210的第一交点以及第二交点的各学习值的大小关系与图5中的特征点200以及特征点210的各推定值的大小关系是否一致(步骤S107)。
在大小关系一致的情况下(步骤S107:真),推定部413将特征点200的推定值的2倍值与特征点200的学习值的2倍值的误差,如数式(6)那样相加到累积误差的变量“TotalDiff[Np_tmp]”中(步骤S108)。
TotalDiff[Np_tmp]
+=(2×Est_CP[Nseg]-2×Est_CP[Nseg])…(6)
推定部413将特征点210的推定值的2倍值与特征点210的学习值的2倍值的误差,如数式(7)那样相加到累积误差的变量“TotalDiff[Np_tmp]”中(步骤S109)。
TotalDiff[Np_tmp]
+=(2×Est_CP[Nseg+1]-2×Est_CP[Nseg+1])…(7)
在大小关系不一致的情况下(步骤S107:伪),推定部413使每个段Nseg的误差的评价值即错误点“ErrorPoint[Np_tmp]”的值递增(步骤S110)。
图8是表示极对编号的计算处理的例子的流程图。位置推定装置4接着图7所示的大小比较处理,执行极对编号的计算处理。
推定部413使表示大小比较处理的执行次数的变量的值递增(步骤S111)。推定部413判定表示大小比较处理的执行次数的变量的值是否为设定次数以上(步骤S112)。在表示执行次数的变量的值小于设定次数的情况下(步骤S112:伪),推定部413使极对编号“Np_tmp”的值递增(步骤S113)。
在表示执行次数的变量的值是设定次数以上的情况下(步骤S112:真),推定部413判定多个错误点中最小的错误点“Min(ErrorPoint[Np_tmp])”的个数(步骤S114)。在最小的错误点的个数是1个的情况下(步骤S114:1个),推定部413使处理进入步骤S116。这样,推定部413将与大小关系一致的段对应的极对编号推定为转子21的旋转位置。
在最小的错误点的个数是多个的情况下(步骤S114:多个),推定部413取得累积误差最小的极对编号“Np_tmp”(步骤S115)。推定部413将极对编号“Np_tmp”代入到表示正确的极对编号的变量“Np”中。推定部413将表示正确的极对编号的变量“Np”作为旋转位置的检测结果(机械角的绝对值)输出到控制装置5。这样,推定部413按段计算各学习值与各推定值的误差。推定部413可以按段计算各学习值的绝对值与各推定值的绝对值的误差。推定部413将各学习值与各推定值的误差最小的段的极对编号推定为转子21的旋转位置(步骤S116)。
如上所述,第一实施方式的位置推定装置4具有特征量计算部412和推定部413。特征量计算部412在转子角小于1周的范围内,取得转子21的3处以上的磁场强度的检测值。特征量计算部412从预先确定为转子21的极对编号的多个分区中,根据磁场强度的检测值来选择分区。特征量计算部412根据与所选择的分区对应的磁场强度的检测值的组合,计算出磁场强度的波形的多个特征量。推定部413按与选择出的分区对应起来的段,判定预先学习到的多个特征量的大小关系与计算出的多个特征量的大小关系是否一致。推定部413将与大小关系一致的段对应起来的极对编号推定为转子21的旋转位置。
由此,第一实施方式的位置推定装置4即使在转子角是0度的情况下也能够推定转子21的旋转位置。控制装置5也可以在马达2或控制装置5接通电源时不调整转子21的旋转位置的原点。推定部413根据各学习值与各推定值的大小关系来推定转子21的旋转位置,因此,即使在传感器220的输出随着经年劣化以及环境温度等发生了变化的情况下,也能够推定转子21的旋转位置。
(第二实施方式)
在第二实施方式中,与第一实施方式的不同点在于:在转子角为“电角的半周期”以下的范围,例如转子角为“8分之1(机械角)”周以下的范围内,位置推定装置4推定转子21的旋转位置。在第二实施方式中,对与第一实施方式的不同点进行说明。
图9是表示马达单元1的结构的例子的图。在第二实施方式中,驱动装置6在转子角为“8分之1(机械角)”周以下的范围内,使转子21旋转。切换部410将从转换装置40取得的U相信号Hu、V相信号Hv以及W相信号Hw输出到特征量计算部412。在第二实施方式中,不执行基于校正部411的磁场强度的波形的校正处理。在马达单元1根据未实施校正处理的波形来执行位置推定的情况下,马达单元1能够提高波形的各特征点的模式(pattern)的识别性。另外,校正部411也可以执行针对波形的降噪处理等。
图10是表示波形的特征点的检测值的例子的图。特征量计算部412根据转子21的转子角从切换部410取得转子21的3处以上的磁场强度的检测值。在图10中,特征量计算部412从切换部410取得8分之1周(机械角)的范围内的U相信号Hu、V相信号Hv以及W相信号Hw的各磁场强度的波形。特征量计算部412根据磁场强度的检测值,计算出磁场强度的波形的多个特征量。所谓多个特征量例如是磁场强度的波形的各交点的检测值的绝对值、以及磁场强度的波形的最大值或最小值的检测值的绝对值。
特征量计算部412在各磁场强度的波形的检测值中的至少一个的正负发生了变化的情况下,计算出磁场强度的波形的最大值或最小值的检测值的绝对值。例如,在从分区“0”的中途到分区“1”之间,U相信号Hu、V相信号Hv和W相信号Hw中的任一个波形均未通过值是0的基准线50(零交叉)。该情况下,存在V相信号Hv的波形中的特征点130的位置不确定的情况,因此,特征量计算部412可以不计算特征点130的检测值的绝对值。
例如,在推定部413根据从分区“0”的中途到分区“5”的“8分之1周(机械角)”的范围来推定转子21的旋转位置的情况下,所谓多个特征量是作为第一交点的特征点230的检测值的绝对值、作为第二交点的特征点240的检测值的绝对值、作为第三交点的特征点250的检测值的绝对值、作为最大值的特征点140的检测值的绝对值、以及作为最小值的特征点150的检测值的绝对值。
例如,在推定部413根据从分区“2”的中途到分区“7”的“8分之1周(机械角)”的范围来推定转子21的旋转位置的情况下,所谓多个特征量是作为第一交点的特征点240的检测值的绝对值、作为第二交点的特征点250的检测值的绝对值、作为第三交点的特征点260的检测值的绝对值、作为最大值的特征点160的检测值的绝对值、以及作为最小值的特征点150的检测值的绝对值。
特征量计算部412也可以对磁场强度的检测值乘以倍率,由此计算出多个特征量。由此,特征量计算部412能够防止检测值的运算处理中的有效数字丢失的发生。
推定部413按转子21的极对编号来判定预先学习到的多个特征量(学习值)的大小关系的模式与计算出的多个特征量(检测值)的大小关系的模式是否一致。推定部413将大小关系的模式一致的极对编号推定为转子21的旋转位置。推定部413根据各学习值与各检测值的大小关系来推定转子21的旋转位置,因此,即使在传感器220的输出随着经年劣化以及环境温度等而发生了变化的情况下,也能够推定转子21的旋转位置。推定部413也可以根据预先学习到的多个特征量(学习值)与计算出的多个特征量(检测值)之差,来推定转子21的旋转位置。例如,推定部413也可以将学习值与检测值之差最小的极对编号推定为转子21的旋转位置。
图11是表示波形的最大值和最小值的学习值的例子的图。在图11中,波形的最大值的学习值、波形的最小值的学习值、极对编号彼此相对应。特征点140(max)的检测值的绝对值的2倍值例如是“7660”。特征点150(min)的检测值的绝对值的2倍值例如是“7410”。该情况下,最大值和最小值的大小关系的模式是特征点140的检测值的绝对值大于特征点150的检测值的绝对值这一模式。
推定部413按转子21的极对编号,判定最大值及最小值的各学习值的绝对值的大小关系的模式与特征点140及特征点150的检测值的绝对值的大小关系的模式是否一致。
在图11中,推定部413判定为与极对编号“0”对应起来的最大值及最小值的大小关系的模式与特征点140及特征点150的检测值的绝对值的大小关系的模式相一致。对于极对编号“1”也是同样的。推定部413按大小关系的各模式一致的极对编号将各检测值与各学习值的误差相加。
在图11中,推定部413判定为与极对编号“2”相对应的最大值及最小值的大小关系的模式与特征点140及特征点150的检测值的绝对值的大小关系的模式不一致。对于极对编号“3”也是同样的。推定部413对大小关系的各模式不一致的极对编号的错误点加上值。
此外,由于推定部413没有对大小关系的各模式一致的极对编号的错误点加上值,因此大小关系的各模式一致的极对编号的错误点的值是最小值“0”。
图12是表示波形的交点的学习值的例子的图。在图12中,波形的第一交点的学习值、波形的第二交点的学习值、波形的第三交点的学习值、极对编号相互对应。特征点230(第一交点)的检测值的绝对值的2倍值例如是“3888”。特征点240(第二交点)的检测值的绝对值的2倍值例如是“3779”。特征点250(第三交点)的检测值的绝对值的2倍值例如是“3881”。该情况下,各交点的大小关系的模式是特征点230的检测值的绝对值的2倍值比特征点240的检测值的绝对值的2倍值大这一模式。是特征点230的检测值的绝对值的2倍值比特征点250的检测值的绝对值的2倍值大这一模式。是特征点240的检测值的绝对值的2倍值比特征点250的检测值的绝对值的2倍值小这一模式。
推定部413按转子21的极对编号,判定3个交点的各学习值的绝对值的大小关系的模式与特征点230、特征点240、特征点250的各检测值的绝对值的大小关系的模式是否一致。
在图12中,推定部413判定为与极对编号“0”相对应的3个交点的各学习值的绝对值的大小关系的模式与特征点140和特征点150的各检测值的绝对值的大小关系的模式一致。对于极对编号“1”也是同样的。推定部413按大小关系的各模式一致的极对编号将各检测值与各学习值的误差相加。
在图12中,推定部413判定为与极对编号“2”对应起来的3个交点的各学习值的绝对值的大小关系的模式与特征点140以及特征点150的各检测值的绝对值的大小关系的模式不一致。对于极对编号“3”也是同样的。推定部413对大小关系的各模式不一致的极对编号的错误点加上值。
推定部413按极对编号取得各检测值与各学习值的累积误差。推定部413将最小的累积误差的1个极对编号代入到表示正确的极对编号的1个变量中。推定部413也可以从各极对编号中取得最小的错误点的极对编号。推定部413也可以将最小的错误点的1个极对编号代入到表示正确的极对编号的1个变量中。
接着,对位置推定装置4的动作例进行说明。
图13是表示检测值的取得处理的例子的流程图。位置推定装置4例如以预先确定的周期反复执行图13以及图14的各流程图所示的动作。特征量计算部412判定磁场强度的波形的第一交点到第三交点的各学习值以及磁场强度的波形的最大值和最小值的各学习值是否已存储在存储装置42中。例如,特征量计算部412判定特征点230、特征点240、特征点250的各学习值以及特征点140、特征点150的各学习值是否已存储在存储装置42中(步骤S201)。
在各学习值没有存储在存储装置42中的情况下(步骤S201:否),特征量计算部412执行计算特征点的学习值的处理(学习处理)。特征量计算部412将计算出的特征点的学习值和极对编号记录在存储装置42所存储的数据表中。特征量计算部412也可以将计算出的特征点的学习值和段编号记录在数据表中(步骤S202)。
在各学习值存储在存储装置42中的情况下(步骤S201:是),特征量计算部412判定旋转位置(机械角的绝对值)的推定是否完成(步骤S203)。在旋转位置的推定完成了的情况下(步骤S203:否),位置推定装置4执行预先确定的通常处理(步骤S204)。
特征量计算部412执行计算磁场强度的波形的第一交点到第三交点的各检测值的处理。特征量计算部412执行计算磁场强度的波形的最大值和最小值的各检测值的处理。特征量计算部412判定各检测值的取得是否完成(步骤S205)。
在各检测值的取得没有完成的情况下(步骤S205:否),特征量计算部412根据磁场强度的波形来判定转子21的旋转方向是否恒定(步骤S206)。在转子21的旋转方向不恒定的情况下(步骤S206:否),位置推定装置4结束图13所示的处理。
在转子21的旋转方向恒定的情况下(步骤S206:是),判定在位置推定装置4接通电源后U相信号Hu、V相信号Hv和W相信号Hw中的任一个波形是否通过了基准线50(零交叉)。
例如,在推定部413根据图10所示的分区“0”的中途到分区“5”的“8分之1周(机械角)”的范围来推定转子21的旋转位置的情况下,在分区“0”的中途到分区“1”的期间,U相信号Hu、V相信号Hv和W相信号Hw中的任一个波形都没有通过基准线50。即,在分区“0”的中途到分区“1”的期间,U相信号Hu、V相信号Hv和W相信号Hw中的任一个波形的数字值的正负都没有变化。在数字值的正负没有变化的情况下,也可以不取得表示分区“0”的中途到分区“1”的期间的V相信号Hv的最小值的特征点130的检测值。这是因为,V相信号Hv的波形中的特征点130的位置不确定,因此,存在特征量计算部412无法准确地计算出特征点130的检测值的情况。
例如,在推定部413根据图10所示的分区“2”的中途到分区“7”的“8分之1周(机械角)”的范围来推定转子21的旋转位置的情况下,因同样的理由,也可以不取得表示分区“2”的中途到分区“7”的期间的U相信号Hu的波形的最大值的特征点140的检测值(步骤S207)。
在任一个波形均没有通过基准线50的情况下(步骤S207:否),位置推定装置4结束图13所示的处理。
在与转子21的旋转对应地,任一个波形通过了基准线50的情况下(步骤S207:是),特征量计算部412执行计算磁场强度的波形的第一交点到第三交点的各检测值的处理以及计算磁场强度的波形的最大值和最小值的各检测值的处理。例如,在推定部413根据图10所示的分区“0”的中途到分区“5”的“8分之1周(机械角)”的范围来推定转子21的旋转位置的情况下,特征量计算部412执行计算特征点230、特征点240以及特征点250的各检测值的处理、和计算特征点140以及特征点150的各检测值的处理(步骤S208)。
图14是表示极对编号的计算处理的例子的流程图。位置推定装置4接着图13所示的检测值的取得处理,执行极对编号的计算处理。
当在图13所示的步骤S205中完成了各检测值的取得的情况下(步骤S205:是),推定部413将第一交点到第三交点的各检测值的大小关系的模式、与第一交点到第三交点的各学习值的大小关系的模式进行对照。推定部413将最大值和最小值的各检测值的绝对值的大小关系的模式与最大值和最小值的各学习值的绝对值的大小关系的模式进行对照。
例如,在推定部413根据图10所示的分区“0”的中途到分区“5”的“8分之1周(机械角)”的范围来推定转子21的旋转位置的情况下,推定部413将特征点230、特征点240以及特征点250的各检测值的大小关系的模式与特征点230、特征点240、特征点250的各学习值的大小关系的模式进行对照。推定部413将特征点140和特征点150的各检测值的绝对值的大小关系的模式与特征点140和特征点150的各学习值的绝对值的大小关系的模式进行对照(步骤S209)。
推定部413判定大小关系的各模式是否一致。即,推定部413判定最大值的检测值的绝对值与最小值的检测值的绝对值的大小关系、第一交点的检测值与第二交点的检测值的大小关系、第一交点的检测值与第三交点的检测值的大小关系、第二交点的检测值与第三交点的检测值的大小关系是否都一致。
例如,在根据图10所示的分区“0”的中途到分区“5”的“8分之1周(机械角)”的范围来推定转子21的旋转位置的情况下,推定部413判定特征点140的检测值的绝对值与特征点150的检测值的绝对值的大小关系、特征点230的检测值与特征点240的检测值的大小关系、特征点230的检测值与特征点250的检测值的大小关系、特征点240的检测值与特征点250的检测值的大小关系是否都一致。
例如,在根据图10所示的分区“2”的中途到分区“7”的“8分之1周(机械角)”的范围来推定转子21的旋转位置的情况下,推定部413判定特征点160的检测值的绝对值与特征点150的检测值的绝对值的大小关系、特征点240的检测值与特征点250的检测值的大小关系、特征点240的检测值与特征点260的检测值的大小关系、特征点260的检测值与特征点260的检测值的大小关系是否都一致(步骤S210)。
在大小关系的各模式相一致的情况下(步骤S210:是),推定部413按大小关系的各模式一致的极对编号将各检测值与各学习值的误差相加。由此,推定部413按极对编号取得各检测值与各学习值的累积误差(步骤S211)。在大小关系的各模式不一致的情况下(步骤S210:否),推定部413对大小关系的各模式不一致的极对编号的错误点加上值(步骤S212)。
推定部413从各极对编号中取得最小的错误点的极对编号。推定部413将所取得的1个以上的极对编号代入到表示正确的极对编号的1个以上的变量中(步骤S213)。推定部413判定最小的错误点的极对编号的个数是否是多个(步骤S214)。在最小的错误点的极对编号的个数是1个的情况下(步骤S214:否),推定部413使处理进入步骤S216。在最小的错误点的极对编号的个数是多个的情况下(步骤S214:是),推定部413将最小的累积误差的1个极对编号代入到表示正确的极对编号的1个变量中(步骤S215)。推定部413将表示正确的极对编号的1个变量作为旋转位置的检测结果(机械角的绝对值)输出到控制装置5(步骤S216)。
如上所述,第二实施方式的位置推定装置4具有特征量计算部412和推定部413。特征量计算部412在转子角小于1周的范围内,根据转子角来取得转子21的3处以上的磁场强度的检测值。特征量计算部412根据磁场强度的检测值,计算出磁场强度的波形的多个特征量。推定部413按转子21的极对编号,判定预先学习到的多个特征量的大小关系的模式与计算出的多个特征量的大小关系的模式是否一致。推定部413将大小关系的模式一致的极对编号推定为转子21的旋转位置。
由此,即使转子角为“8分之1(机械角)”周以下,第二实施方式的位置推定装置4也能够推定转子21的旋转位置。此外,在推定部413根据2个交点以及最大值或最小值的特征点的合计3个特征点的检测值来推定转子21的旋转位置的情况下,特征量计算部412能够计算少于5个的3个特征量,因此,即使在转子角为“16分之1(机械角)”周以下,推定部413也能够推定转子21的旋转位置。
此外,第二实施方式的位置推定装置4也可以在执行了第一实施方式所示的位置推定方法之后,继承位置推定结果的位置推定结果的参数值,执行第二实施方式所示的位置推定方法。第二实施方式的位置推定装置4也可以在执行了第二实施方式所示的位置推定方法之后,继承位置推定结果的位置推定结果的参数值,执行专利文献1所示的位置推定方法。
(第三实施方式)
在第三实施方式中,与第二实施方式的不同点在于,位置推定装置4根据更多的特征点来推定转子21的旋转位置。在第三实施方式中,对与第二实施方式的不同点进行说明。
图15是表示波形的特征点的检测值的例子的图。特征量计算部412根据转子21的转子角而从切换部410取得转子21的3处以上的磁场强度的检测值。在图15中,特征量计算部412从切换部410取得8分之1周(机械角)的范围内的U相信号Hu、V相信号Hv以及W相信号Hw的各磁场强度的波形。
特征量计算部412根据磁场强度的检测值来计算磁场强度的波形的多个特征量。所谓多个特征量例如是磁场强度的波形的各交点的检测值的绝对值、磁场强度的波形的最大值或最小值的检测值的绝对值、以及磁场强度的波形通过了基准线50时的其他各波形的检测值的绝对值。
在U相信号Hu、V相信号Hv和W相信号Hw中的任一个波形通过了基准线50时,特征量计算部412计算出其他各波形的检测值的绝对值。在图15中,在W相信号Hw的波形通过了基准线50时,特征量计算部412计算出U相信号Hu的特征点270的检测值的绝对值和V相信号Hv的特征点280的检测值的绝对值。在V相信号Hv的波形通过了基准线50时,特征量计算部412计算出U相信号Hu的特征点290的检测值的绝对值和W相信号Hw的特征点300的检测值的绝对值。在U相信号Hu的波形通过了基准线50时,特征量计算部412计算出V相信号Hv的特征点310的检测值的绝对值和W相信号Hw的特征点320的检测值的绝对值。
例如,在推定部413根据分区“0”的中途到分区“5”的“8分之1周(机械角)”的范围来推定转子21的旋转位置的情况下,所谓多个特征量是作为第一交点的特征点230的检测值的绝对值、作为第二交点的特征点240的检测值的绝对值、作为第三交点的特征点250的检测值的绝对值、作为最大值的特征点140的检测值的绝对值、作为最小值的特征点150的检测值的绝对值、特征点270、特征点280、特征点290以及特征点300的各检测值的绝对值。
例如,在推定部413根据分区“2”的中途到分区“7”的“8分之1周(机械角)”的范围来推定转子21的旋转位置的情况下,所谓多个特征量是作为第一交点的特征点240的检测值的绝对值、作为第二交点的特征点250的检测值的绝对值、作为第三交点的特征点260的检测值的绝对值、作为最大值的特征点160的检测值的绝对值、作为最小值的特征点150的检测值的绝对值、特征点290、特征点300、特征点310以及特征点320的各检测值的绝对值。
推定部413按转子21的极对编号,判定最大值和最小值的各学习值的绝对值的大小关系的模式与特征点140和特征点150的检测值的绝对值的大小关系的模式是否一致。
推定部413按转子21的极对编号,判定3个交点的各学习值的绝对值的大小关系的模式与特征点230、特征点240、特征点250的各检测值的绝对值的大小关系的模式是否一致。
推定部413按转子21的极对编号,判定与基准线50以及各波形对应的4个特征点的各学习值的绝对值的大小关系的模式与特征点270、特征点280、特征点290、特征点300的各检测值的绝对值的大小关系的模式是否一致。
推定部413按极对编号取得各检测值与各学习值的累积误差。推定部413将最小的累积误差的1个极对编号代入到表示正确的极对编号的1个变量中。推定部413也可以从各极对编号中取得最小的错误点的极对编号。推定部413也可以将最小的错误点的1个极对编号代入到表示正确的极对编号的1个变量中。
如上所述,第三实施方式的位置推定装置4具有推定部413。推定部413按转子21的极对编号,判定与基准线50以及各波形对应的4个以上的特征点的各学习值的绝对值的大小关系的模式与4个以上的特征点的各检测值的绝对值的大小关系的模式是否一致。推定部413将大小关系的模式一致的极对编号推定为转子21的旋转位置。
由此,即使转子角为“8分之1(机械角)”周以下,第三实施方式的位置推定装置4也能够进一步提高推定转子21的旋转位置的精度。
此外,第三实施方式的位置推定装置4也可以在执行了第一实施方式所示的位置推定方法之后,继承位置推定结果的参数值,执行第三实施方式所示的位置推定方法。第三实施方式的位置推定装置4也可以在执行了第三实施方式所示的位置推定方法之后,继承位置推定结果的参数值,执行专利文献1所示的位置推定方法。
以上,参照附图对本发明的实施方式进行了详细叙述,但具体的结构不限于该实施方式,也包括不脱离本发明的主旨的范围的设计等。
在马达2的设计中,传感器220-U、传感器220-V、传感器220-W的安装位置的精度也可以设计为有意地分散。由此,U相信号Hu、V相信号Hv以及W相信号Hw的各波形的振幅等成为相互不同的值,因此,波形的识别性提高。通过波形的识别性的提高,位置推定装置4能够进一步提高推定量产的马达2的转子21的旋转位置的精度。
此外,也可以将用于实现本发明中的位置推定装置的功能的程序记录在未图示的计算机可读取的记录介质中,使计算机系统读入并执行记录在该记录介质中的程序,由此进行各处理的步骤。此外,这里所说的“计算机系统”包括OS、周边设备等的硬件。另外,“计算机系统”也包括具有主页提供环境(或者显示环境)的WWW系统。另外,所谓“计算机可读取的记录介质”是软盘、光磁盘、ROM、CD-ROM等可移动介质、内置于计算机系统的硬盘等存储装置。
并且,所谓“计算机可读取的记录介质”也包括像作为经由互联网等网络或电话线路等通信线路发送程序的情况下的服务器或客户端的计算机系统内部的易失性存储器(RAM)那样,保持一定时间程序的介质。
另外,上述程序也可以从将该程序存储在存储装置等中的计算机系统经由传输介质、或者通过传输介质中的传输波传输到其他计算机系统。这里,传输程序的“传输介质”是像互联网等网络(通信网)或电话线路等通信线路(通信线)那样具有传输信息的功能的介质。另外,上述程序也可以用于实现所述的功能的一部分。并且,也可以是能够通过与已经记录在计算机系统中的程序的组合来实现上述的功能的所谓的差分文件(差分程序)。
附图标记说明
1…马达单元、2…马达、3…放大装置、4…位置推定装置、5…控制装置、6…驱动装置、7…外部装置、20…定子、21…转子、22…检测装置、30…差动放大器、40…转换装置、41…运算装置、42…存储装置、50…基准线、100…采样点、110…采样点、120…采样点、130…特征点、140…特征点、150…特征点、160…特征点、200…特征点、210…特征点、220…传感器、230…特征点、240…特征点、250…特征点、260…特征点、270…特征点、280…特征点、290…特征点、300…特征点、310…特征点、320…特征点、400…转换部、410…切换部、411…校正部、412…特征量计算部、413…推定部、500…特征点。
- 物体位置推定系统、物体位置推定装置、物体位置推定方法及物体位置推定程序
- 物体位置推定系统、物体位置推定装置、物体位置推定方法及物体位置推定程序