拖车边缘跟踪
文献发布时间:2023-06-19 11:27:38
技术领域
本公开涉及一种被配置为附接到拖车的牵引车。牵引车包括侧后视镜,该侧后视镜调节成将拖车边缘的景色维持在驾驶员的视野内。
背景技术
拖车通常是由动力牵引车拖拽的无动力车辆。拖车可以是通用拖车、弹出式野营车、旅行拖车、牲畜拖车、平板拖车、封闭式调度车和船拖车等。牵引车可以是汽车、跨界车、卡车、货车、运动型多功能车(SUV)、休闲车(RV)或被配置成附接到拖车并拖拽拖车的任何其他车辆。拖车可以使用拖车栓钩来附接到动力车辆。受方栓钩安装在牵引车上并且连接到拖车栓钩以形成连接。拖车栓钩可以是球窝式连接器、牵引座和鹅颈管、或拖车千斤顶。也可以使用其他附接机构。除了拖车和动力车辆之间的机械连接之外,在一些示例中,拖车电连接到牵引车。这样,电连接允许拖车从动力车辆的尾灯电路获取馈电,从而允许拖车具有与动力车辆的灯同步的尾灯、转向信号和刹车灯。
车辆-拖车系统的驾驶员可能有时很难在侧电动后视镜中观察到拖车的边缘,尤其是在转弯或在向后方向上驾驶时。在这种情况下,驾驶员必须不断地移动他/她的身体以在侧电动后视镜内观察拖车。意图用于拖车拖运的卡车后视镜通常体积大,以便增加驾驶员的视觉范围。SUV后视镜通常具有较小的镜子,而难以找到配件解决方案。因此,希望有一种系统,其克服了驾驶员在尝试在侧电动后视镜中寻找拖车边缘时所面临的困难,并且允许在使用较小的镜子时的大的视觉范围。
发明内容
本公开的一个方面提供了一种用于基于拖车的位置来调节由附接到拖车的牵引车支撑的电动后视镜从而允许牵引车的驾驶员观察拖车的边缘的方法。该方法包括在车辆控制器的数据处理硬件处接收来自定位在牵引车后部上的传感器系统的传感器系统数据。该方法包括在数据处理硬件处接收与电动后视镜相关联的当前后视镜角度。该方法包括在数据处理硬件处基于当前后视镜角度和所接收的传感器系统数据来确定调节后视镜角度。该方法包括从数据处理硬件向电动后视镜发送指令以将当前后视镜角度调节到调节后视镜角度,从而使得电动后视镜将拖车边缘维持在驾驶员在看着电动后视镜时的视野内。
本公开的实现可以包括以下可选特征中的一个或多个。在一些实现中,传感器系统数据包括从定位在牵引车的后部上的摄像机接收的一个或多个图像。在一些示例中,该方法包括从与数据处理硬件通信的座椅模块接收驾驶员座椅位置数据。调节后视镜角度还可以基于驾驶员座椅位置数据。该方法还可以包括从被定位成捕获驾驶员眼睛位置的一个或多个传感器接收驾驶员眼睛位置(例如,传感器数据)。调节后视镜角度还可以基于驾驶员眼睛位置。
在一些实现中,该方法包括确定拖车的轮轴长度,该轮轴长度包括拖车和牵引车之间的挂接点与拖车轮轴之间的距离。调节后视镜角度还可以基于拖车的轮轴长度。该方法可以包括确定从挂接点到驾驶员座椅中心的驾驶员座椅距离。调节后视镜角度也可以基于驾驶员座椅距离。该方法还可以包括确定电动后视镜中心C
本公开的另一方面提供了一种用于基于拖车的位置来调节由附接到拖车的牵引车支撑的电动后视镜从而允许牵引车的驾驶员观察拖车的边缘的系统。该系统包括数据处理硬件和与数据处理硬件通信的存储器硬件。存储器硬件存储指令,所述指令当在数据处理硬件上执行时,使数据处理硬件执行包括上述方法的操作。
在附图和以下描述中阐述了本公开的一个或多个实现的细节。从说明书和附图以及从权利要求书中,其他方面、特征和优点将是显而易见的。
附图说明
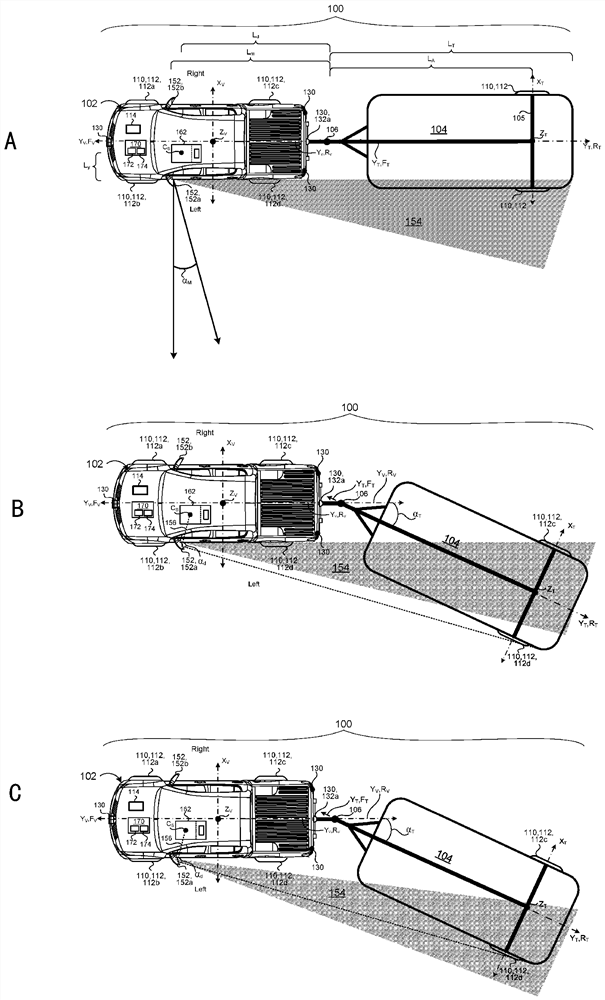
图1A-1C是挂接到拖车的示例性牵引车的俯视图;
图2是示例性车辆电动后视镜的透视图;
图3是示例性牵引车具有的示意图;
图4是用于调节附接到拖车的车辆的车辆侧电动后视镜的操作的示例性布置的示意图。
在各个附图中相同的附图标记表示相同的元素。
具体实施方式
牵引车(例如但不限于汽车、跨界车、卡车、货车、运动型多用途车(SUV)和休闲车(RV))可以被配置成牵引拖车。牵引车通过拖车栓钩连接到拖车。希望具有一种包括侧电动后视镜的牵引车,所述侧电动后视镜可以旋转以将拖车边缘的图像维持在驾驶员的视野内。
参照图1A-3,在一些实现中,车辆-拖车系统100包括通过挂接点106挂接到拖车104的牵引车102。牵引车102包括与牵引车102相关联的驾驶系统110,其基于例如具有X、Y和Z分量的驾驶操纵或命令来操纵牵引车102并因此操纵车辆-拖车系统100跨越道路表面。如所示,驾驶系统110包括右前轮112、112a、左前轮112、112b、右后轮112、112c和左后轮112、112d。此外,驾驶系统110可以包括与拖车104相关联的车轮112。驾驶系统110也可以包括其他车轮配置。驾驶系统110可以包括将一种形式的能量转换为允许牵引车102移动的机械能的马达或引擎114。驾驶系统110包括其他组件(未示出),这些组件与车轮112和引擎114通信并与它们连接,并且允许牵引车102移动,从而也使拖车104移动。驾驶系统110还可包括制动系统(未示出),其包括与每个车轮112、112a-d相关联的制动器,其中,每个制动器与车轮112a-d相关联并且被配置成减慢或停止车轮112a-n以免旋转。在一些示例中,制动系统连接到由拖车104支撑的一个或多个制动器。驾驶系统110还可以包括加速系统(未示出)和操控系统(未示出),所述加速系统被配置为调节牵引车102的速度并因此调节车辆-拖车系统100的速度,所述操控系统被配置为调节牵引车102的方向并因此调节车辆-拖车系统100的方向。车辆-拖车系统100也可以包括其他系统。
牵引车102可以通过相对于由牵引车102限定的三个相互垂直的轴的运动的各种组合而跨越道路表面移动:横向轴X
此外,拖车104通过相对于由拖车104限定的三个相互垂直的轴的运动的各种组合来跟随牵引车102跨越道路表面:拖车横向轴X
在一些实现中,牵引车102包括传感器系统130,以提供可用于确定一个或多个测量的传感器系统数据136,例如拖车长度L
牵引车102可以包括用户界面140,例如显示器。用户界面140被配置为向驾驶员显示信息。在一些示例中,用户界面140被配置为经由一个或多个输入机构或触摸屏显示器从驾驶员接收一个或多个用户命令和/或向驾驶员显示一个或多个通知。在一些示例中,用户界面140是触摸屏显示器。在其他示例中,用户界面140可以不是触摸屏,并且驾驶员可以使用输入设备,诸如但不限于旋转旋钮或鼠标来进行选择。在一些示例中,驾驶员可以与用户界面140交互以打开或关闭“后视镜跟踪”特征,该“后视镜跟踪”特征自动地调节一个或多个车辆电动后视镜152、152a、152b以确保拖车边缘位于后视镜的反射的中心。
牵引车102包括电动后视镜系统150,其包括左侧后视镜152、152a和右侧后视镜152、152b。后视镜系统150被配置成控制后视镜152的位置。参照图1A,电动后视镜152以给定角度被设置,从而提供与给定角度相关联的视野154。因此,视野154基于后视镜角度/位置而改变。当拖车104与牵引车102在相同的方向上对齐时(即零铰接角),拖车104的侧面是可见的,如图1A所示。参照图1B,当拖车角度α
参照图2,每个后视镜152限定了沿x轴和y轴的平面。x轴在后视镜152、152a、152b的右边缘和后视镜152、152a、152b的左边缘之间延伸。y轴在后视镜152、152a、152b的顶部边缘与后视镜152、152a、152b的底部边缘之间延伸。后视镜中心C
牵引车102还包括座椅模块160,该座椅模块包括驾驶员座椅162。座椅模块160被配置为基于一个或多个驾驶员命令来调节驾驶员座椅162。在一些示例中,座椅模块160基于驾驶员调节来确定驾驶员座椅162的位置。
传感器系统130、用户界面140、电动后视镜系统150和座椅模块160与车辆控制器170通信。车辆控制器170包括计算设备(或数据处理硬件)172(例如,具有一个或多个计算处理器的中央处理单元),其与能够存储可在(一个或多个)计算处理器上执行的指令的非暂时性存储器或硬件存储器174(例如,硬盘、闪存、随机存取存储器)通信。在一些示例中,非暂时性存储器174存储指令,所述指令当在计算设备172上执行时,使车辆控制器170向电动后视镜系统150提供信号或命令176,这使(一个或多个)电动后视镜152调节其角度。如所示,车辆控制器170由牵引车102支撑;然而,车辆控制器170可以与牵引车102分离并且经由网络(未示出)与牵引车102通信。
在一些实现中,车辆控制器170接收来自传感器系统130的传感器系统数据136、来自电动后视镜系统150的当前后视镜角度α
在一些实现中,车辆控制器170基于从传感器系统130接收的传感器系统数据136确定从挂接点106到拖车104的旋转中心Z
车辆控制器170还从后视镜系统150接收指示每个后视镜152的角度的当前后视镜角度α
在一些实现中,车辆控制器170确定到后视镜152的驾驶员视线156与拖车104的边缘之间的驾驶员视线角度α
在一些示例中,车辆控制器170还基于由摄像机132确定的挂接点106(或车辆牵引球)的已知位置和后视镜152的已知位置来确定从后视镜中心C
车辆控制器170还可基于驾驶员座椅位置数据164和挂接点106的位置来确定从挂接点106到驾驶员座椅162的中心C
车辆控制器170还可以确定后视镜152和驾驶员座椅162的中心C
在一些实现中,车辆控制器170基于大多数的拖车104的轮轴105位于距挂接点106的拖车装载区域长度的60%处的事实来确定拖车长度L
在其他示例中,车辆控制器170从位于牵引车102的侧面上的摄像机132或传感器134接收传感器数据136,并且当牵引车102相对于拖车104成角度α
因此,车辆控制器170确定用于后视镜152的调节后视镜角度α
图4提供了方法400的操作的示例性布置,所述方法用于使用图1A-3中描述的系统基于拖车的位置来调节由附接到拖车104的牵引车102支撑的电动后视镜152、152a、152b从而允许牵引车102的驾驶员观察拖车104的边缘。在框402处,方法400包括在车辆控制器170的数据处理硬件172处接收来自定位在牵引车102的后部上的传感器系统130的传感器系统数据136。在框404,方法400包括在数据处理硬件172处接收与电动后视镜152、152a、152b相关联的当前后视镜角度α
在一些实现中,传感器系统数据136包括从定位在牵引车102的后部上的摄像机132接收的一个或多个图像133。在一些示例中,方法400包括从与数据处理硬件172通信的座椅模块160接收驾驶员座椅位置数据164。调节后视镜角度α
在一些实现中,方法400包括确定拖车104的轮轴长度L
这里描述的系统和技术的各种实现可以以数字电子电路、集成电路、专门设计的ASIC(专用集成电路)、计算机硬件、固件、软件和/或其组合来实现。这些各种实现可以包括在可编程系统上可执行和/或可解释的一个或多个计算机程序中的实现,所述可编程系统包括至少一个可编程处理器,其可以是专用或通用的,被耦合以从存储系统、至少一个输入设备和至少一个输出设备接收数据和指令、以及向存储系统、至少一个输入设备和至少一个输出设备发送数据和指令。
这些计算机程序(也称为程序、软件、软件应用或代码)包括用于可编程处理器的机器指令,并且可以以高级过程和/或面向物体编程语言和/或以汇编/机器语言来实现。如本文所使用的,术语“机器可读介质”和“计算机可读介质”是指用于向可编程处理器提供机器指令和/或数据的任何计算机程序产品、装置和/或设备(例如,磁盘、光盘、存储器、可编程逻辑器件(PLD)),包括接收作为机器可读信号的机器指令的机器可读介质。术语“机器可读信号”是指用于向可编程处理器提供机器指令和/或数据的任何信号。
本说明书中描述的主题和功能操作的实现可以以数字电子电路来实现,或者以计算机软件、固件或硬件(包括本说明书中公开的结构及其结构等效物)来实现,或者以它们中的一个或多个的组合来实现。此外,本说明书中描述的主题可以被实现为一个或多个计算机程序产品,即,在计算机可读介质上编码以供数据处理装置执行或控制数据处理装置的操作的计算机程序指令的一个或多个模块。计算机可读介质可以是机器可读存储设备、机器可读存储基板、存储器设备、实现机器可读传播信号的物质的组合、或者它们中的一个或多个的组合。术语“数据处理装置”、“计算设备”和“计算处理器”涵盖用于处理数据的所有装置、设备和机器,包括例如可编程处理器、计算机、或多个处理器或计算机。除了硬件之外,该装置还可以包括为所讨论的计算机程序创建执行环境的代码,例如,构成处理器固件、协议栈、数据库管理系统、操作系统或它们中的一个或多个的组合的代码。传播信号是人工生成的信号,例如,机器生成的电、光或电磁信号,其被生成以编码信息以便传输到合适的受方装置。
类似地,虽然在附图中以特定顺序描绘了操作,但是这不应当被理解为要求以所示的特定顺序或以顺序的次序执行这样的操作或者要求执行所有示出的操作来实现期望的结果。在某些情况下,多任务和并行处理可能是有利的。此外,上述实施例中的各种系统组件的分离不应被理解为在所有实施例中都需要这种分离,并且应当理解,所描述的程序组件和系统通常可以一起集成在单个软件产品中或封装到多个软件产品中。
已经描述了多种实现。然而,应当理解,在不脱离本公开的精神和范围的情况下,可以进行各种修改。因此,其他实现在所附权利要求的范围内。
- 拖车边缘跟踪
- 用于跟踪基板的边缘及从基板的边缘去除涂层的系统和方法