一种晶圆全自动取粒机
文献发布时间:2023-06-19 11:27:38
技术领域
本申请涉及晶圆制备的技术领域,尤其是涉及一种晶圆全自动取粒机。
背景技术
晶圆是指制作硅半导体电路所用的硅晶片,晶圆在制备过程中,需要将若干晶圆有序的排布在载盘上,再对载盘上的若干晶圆进行检测并拿取装盒。
现有对晶圆的拿取和分离通常是工作人员使用夹子来完成的,工作人员将合格的晶圆从载盘夹出并放置与收纳盒中,再将不合格品单独从载盘上夹出单独放置在收纳盒中。
针对上述中的相关技术,发明人认为存在有通过人工对晶圆进行夹取装盒的工作效率较慢的缺陷。
发明内容
为了提高对晶圆进行夹取装盒的效率,本申请提供一种晶圆全自动取粒机。
本申请提供的一种晶圆全自动取粒机,采用如下的技术方案:一种晶圆全自动取粒机,包括工作台,所述工作台上设置有放置台,所述放置台的上方设置有检测装置,所述检测装置的一侧设置有机械臂,所述放置台连接有取料移动装置,所述机械臂一侧的工作台上设置有承装盘,所述承装盘连接有放料移动装置,所述机械臂包括支撑架,所述支撑架上设置有转动电机,所述转动电机的输出端竖直向下设置,所述输出端的末端连接有取料臂,所述取料臂的末端设置有取料吸嘴,所述支撑架上设置有气泵,所述气泵与取料吸嘴之间连通有抽气管,所述工作台上设置有PLC控制箱,所述取料移动装置、放料移动装置、检测装置和机械臂与PLC控制箱电性相连。
通过上述技术方案,通过PLC控制箱可以控制取料移动装置,使载盘上的各个晶圆均可以移动到检测装置下方处进行检测。在检测装置检测下方的晶圆为合格品后,PLC控制箱控制转动电机使取料臂进行转动,使取料臂的末端移动到合格品的正上方对合格的晶圆进行吸取。在取料臂取料完成以后,转动电机会使取料臂的末端移动到承装盘的上方,使晶圆被放置在承装盘的放置凹槽中。通过放料移动装置使承装盘进行移动,从而使承装盘的各个放置凹槽均可依次移动到取料吸嘴的正下方进行装料,从而实现对晶圆进行自动检测取料,提高对晶圆取料装盒的效率。
本申请进一步设置为:检测装置包括固定架,所述固定架上设置有成像摄像头和显示屏,所述成像摄像头与显示屏电性相连。
通过上述技术方案,通过成像摄像头对于载盘上的晶圆进行拍摄,再通过显示屏对成像摄像头拍摄的图像进行成像分析,便于对载盘上的晶圆进行检测,同时也便于工作人员进行监控。
本申请进一步设置为:所述成像摄像头的下方设置有无影灯环,所述转动电机输出端到无影灯环圆心的水平距离与取料臂的长度相同。
通过上述技术方案,通过无影灯环可以使成像摄像头更清晰的拍摄到载盘上晶圆的图像,便于对晶圆进行成像分析,取料臂对无影灯环圆心下方的晶圆进行取料,保证取料的准确性。
本申请进一步设置为:所述取料移动装置包括取料纵向电动丝杆,所述取料纵向电动丝杆位于放置台的一侧,所述取料纵向电动丝杆上连接有取料纵向滑块,所述取料纵向电动丝杆的外侧设置有取料纵向槽,所述取料纵向槽的开口端朝向放置台一侧设置,所述纵向滑块的外侧壁垂直连接有取料横向电动丝杆,所述取料横向电动丝杆上连接有取料横向滑块,所述取料横向电动丝杆的外侧设置有取料横向槽,所述取料横向槽的开口端朝向放置台一侧设置,所述放置台的侧壁边缘与取料横向滑块的外侧壁连接。
通过上述技术方案,通过取料纵向电动丝杆和取料横向丝杆可以分别使载盘沿纵向和横向进行移动,保证载盘上的各个晶圆均可以移动到检测装置下方进行检测,通过取料纵向电动丝杆和取料横向丝杆可以使载盘移动得更稳定。
本申请进一步设置为:所述放置台上设置有固定筒,所述固定筒的上端设置有卡合槽,所述放置台上转动连接有若干螺纹柱,所述固定筒的外壁设置有供螺纹柱螺纹连接的连接板,所述螺纹柱的下端均设置有齿纹轮,所述放置台上设置有制动轮,所述制动轮连接有制动电机,各所述齿纹轮和制动轮上套置有齿条带,所述制动电机与PLC控制箱电性连接。
通过上述技术方案,通过制动电机可以使各螺纹柱进行转动,使固定筒向上移动,从而使载盘上的晶圆与取料吸嘴的下端接触,保证取料吸嘴可以将晶圆稳定的吸住。
本申请进一步设置为:所述放置台上设置有调节气缸,所述调节气缸的活塞杆末端与齿条带的外侧壁相抵。
通过上述技术方案,通过调节气缸可以调整齿条带的松紧,保证制动轮对各齿纹轮的传动效果。
本申请进一步设置为:所述固定筒下方的放置台镂空设置,所述工作台上设置有支撑气缸,所述支撑气缸的活塞杆竖直向上设置,所述活塞杆的末端设置有支撑块,所述支撑块位于无影灯环圆心的正下方,所述支撑气缸与PLC控制箱电性连接。
通过上述技术方案,制动电机使固定筒向上移动的同时,支撑气缸的活塞杆也会向上伸出,使支撑块的上端保持与载盘的下端接触,直到载盘上的晶圆与取料气嘴接触,保证取料吸嘴与晶圆接触紧密,保证取料吸嘴可以将晶圆吸起来。
本申请进一步设置为:所述支撑块的外侧套置有弱电丝,所述弱电丝的末端一侧串联有电流表和供电瓶,所述电流表与PLC控制箱电性相连。
通过上述技术方案,弱电丝与固定筒接触会放电,这时电流表会检测到电流给PLC控制箱发生信号,使PLC控制箱控制取料移动装置对放置台进行调整,防止放置台上的载盘移动出成像摄像机的检测范围,同时防止固定筒使固定块发生偏移。
本申请进一步设置为:所述放料移动装置包括放料纵向电动丝杆,所述放料纵向电动丝杆上连接有放料纵向滑块,所述放料纵向电动丝杆外侧设置有放料纵向槽,所述放料纵向槽的开口端朝上设置,所述放料纵向电动丝杆的上方设置有放料横向电动丝杆,所述放料横向电动丝杆与放料纵向电动丝杆呈十字交叉设置,所述放料横向电动丝杆上连接有放料横向滑块,所述放料横向电动丝杆的外侧设置有放料横向槽,所述放料横向槽开口端朝上设置,所述放料横向槽的外壁底端与放料纵向滑块的外壁上端连接,所述承装盘的底端与放料横向滑块的上端连接。
通过上述技术方案,通过放料纵向电动丝杆和放料横向丝杆可以分别使承装盘沿纵向和横向进行移动,保证承装盘的各个放置凹槽均可依次移动到取料吸嘴的正下方进行装料。
本申请进一步设置为:所述承装盘上设置有若干放置凹槽,所述放置凹槽中设置有弹性夹片。
通过上述技术方案,通过弹性夹片使晶圆放置得更稳定,保证对晶圆装盒的质量。
综上所述,本申请的有益技术效果为:
1.通过取料移动装置、放料移动装置、检测装置和机械臂,实现对晶圆进行自动检测取料,提高对晶圆取料装盒的效率;
2.通过显示屏对成像摄像头拍摄的图像进行成像分析,便于对载盘上的晶圆进行检测,同时也便于工作人员进行监控;
3.制动电机使固定筒向上移动的同时,支撑气缸的活塞杆也会向上伸出,保证取料吸嘴与晶圆接触紧密,保证取料吸嘴可以将晶圆吸起来。
附图说明
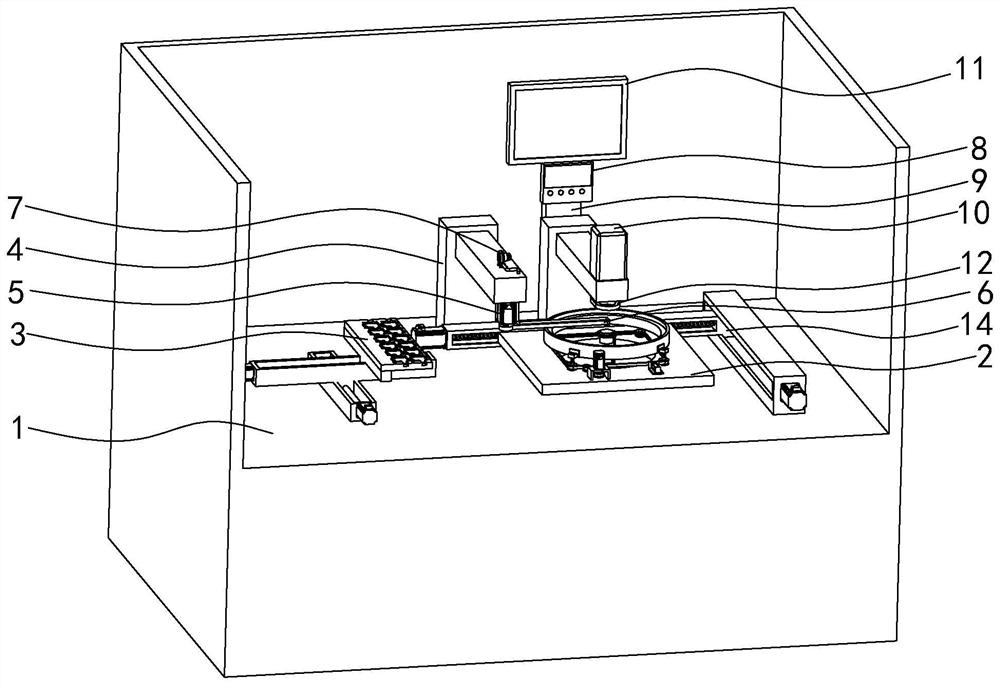
图1是本实施例的整体的结构示意图;
图2是本实施例的取料移动装置的爆炸视图;
图3是本实施例的放料移动装置的爆炸视图。
附图说明,1、工作台;2、放置台;3、承装盘;4、支撑架;5、转动电机;6、取料臂;7、气泵;8、PLC控制箱;9、固定架;10、成像摄像头;11、显示屏;12、无影灯环;13、取料纵向电动丝杆;14、取料纵向滑块;15、取料横向电动丝杆;16、取料横向滑块;17、固定筒;18、螺纹柱;19、连接板;20、齿纹轮;21、制动轮;22、制动电机;23、齿条带;24、调节气缸;25、支撑气缸;26、电流表;27、供电瓶;28、放料纵向电动丝杆;29、放料纵向滑块;30、放料横向电动丝杆;31、放料横向滑块。
具体实施方式
以下结合附图对本申请作进一步详细说明。
实施例:
参照图1和图2,为本申请公开的一种晶圆全自动取粒机,包括工作台1,工作台1的边缘处设置有防尘挡板,通过防尘挡板格挡部分灰尘。工作台1上设置有取料移动装置,取料移动装置包括取料纵向电动丝杆13,取料纵向电动丝杆13上螺纹连接有取料纵向滑块14,取料纵向电动丝杆13的外侧套置固定有取料纵向槽。取料纵向滑块14的外壁与取料纵向槽的内壁贴合,在取料纵向电动丝杆13工作转动时,取料纵向滑块14会在取料纵向槽中进行水平滑动。取料纵向槽的内侧开口设置,取料纵向槽的开口端处设置有取料横向电动丝杆15,取料横向电动丝杆15上螺纹连接有取料横向滑块16,取料横向电动丝杆15的外侧套置固定有取料横向槽,在取料横向电动丝杆15工作转动时,取料横向滑块16会在取料横向槽中水平滑动。
参照图1和图2,取料横向槽的一端与纵向滑块的外侧壁垂直连接,取料横向槽的内侧开口设置,取料横向槽的内侧设置有放置台2,放置台2的侧壁边缘与取料横向滑块16的外侧壁固定连接。放置台2上方设置有固定筒17,固定筒17的上端的内环处设置有卡合槽,通过卡合槽对载盘进行放置限位,使载盘放置得更稳定。在取料纵向电动丝杆13使取料纵向滑块14进行滑动时,取料纵向滑块14会带动取料横向电动丝杆15进行纵向移动,从而使放置台2上的载盘进行纵向移动。在取料横向电动丝杆15使取料横向滑块16进行滑动时,取料横向滑块16会带动放置台2进行横向移动,从而使载盘进行横向移动。
参照图1和图2,放置台2的上方设置有检测装置,检测装置包括固定架9,固定架9的下端与工作台1固定连接。固定架9上设置有固定架9,固定架9的下端与工作台1固定连接,固定架9上设置有成像摄像头10和显示屏11。成像摄像头10位于固定筒17的上方,成像摄像头10与显示屏11电性相连,通过成像摄像头10对载盘上的晶圆进行成像检测,成像摄像头10拍摄的图像会在显示屏11上显示,从而便于分辨载盘上的各个晶圆是否合格。成像摄像头10的下方设置有无影灯环12,通过无影灯环12使成像摄像头10的摄像区更清晰,便于成像摄像头10对下方的载盘进行拍摄成像。
参考图1,检测装置的一侧设置有机械臂,机械臂包括支撑架4,支撑架4的下端与工作台1固定连接。支撑架4上固定有转动电机5,转动电机5与成像摄像头10平行设置。转动电机5的输出端竖直向下设置,输出端的末端垂直连接有取料臂6。转动电机5输出端到无影灯环12圆心的水平距离与取料臂6的长度相同,使转动电机5可以使取料臂6的末端转动到成像摄像头10的正下方。取料臂6的末端设置有取料吸嘴,支撑架4上设置有气泵7,气泵7与取料吸嘴之间连通有抽气管。固定架9上设置有PLC控制箱8,取料移动装置、显示屏11、转动电机5和气泵7与PLC控制箱8电性连接。
参考图1,PLC控制箱8会对显示屏11上的成像进行分析,如果成像摄像头10正下方载盘上的晶圆为不合格品,PLC控制箱8会控制取料移动装置使载盘进行移动,通过取料移动装置可以使载盘上的各个晶圆均可以移动到成像摄像头10的正下方进行检测。在PLC控制箱8通过显示屏11成像分析到成像摄像头10正下方的晶圆为合格品时,PLC控制箱8会控制转动电机5使取料臂6进行转动,使取料臂6的末端移动到成像摄像头10的正下方,从而使取料吸嘴移动到被成像摄像头10检测的晶圆的正上方。
参考图1和图2,放置台2上转动连接有若干螺纹柱18,固定筒17的外壁固定有若干连接板19,螺纹柱18分别垂直穿过连接板19与连接板19螺纹连接。螺纹柱18的下端均穿设有齿纹轮20,放置台2上端面转动连接有制动轮21,制动轮21连接有制动电机22,各齿纹轮20和制动轮21上套置有齿条带23,制动轮21通过齿条带23与各齿纹轮20传动连接。放置台2上设置有调节气缸24,调节气缸24的活塞杆末端与齿条带23的外侧壁相抵,通过调节气缸24可以调整齿条带23的松紧,保证制动轮21对各齿纹轮20的传动效果。制动电机22与PLC控制箱8电性连接,在取料吸嘴移动到被成像摄像头10检测的晶圆的正上方后,PLC控制箱8控制制动电机22进行转动,使各螺纹柱18进行转动,从而使固定筒17向上移动。
参考图1和图2,固定筒17向上移动会使载盘上的晶圆与取料吸嘴的下端接触,PLC控制箱8会控制气泵7启动,通过取料吸嘴将晶圆吸住,再控制制动电机22使固定筒17恢复原位。机械臂远离放置台2一侧的工作台1上设置有承装盘3,承装盘3上设置有若干放置凹槽,放置凹槽中设置有弹性夹片。PLC控制箱8控制转动电机5使取料臂6转动180°,使取料臂6的末端移动到承装盘3的上方,再控制气泵7停止工作,使取料吸嘴将吸住的晶圆松开,使晶圆被放置在承装盘3的放置凹槽中。
参考图1和图3,承装盘3的下方设置有放料移动装置,放料移动装置包括放料纵向电动丝杆28,放料纵向电动丝杆28固定在工作台1上,放料纵向电动丝杆28上连接有放料纵向滑块29,放料纵向电动丝杆28外侧套置固定有放料纵向槽。放料纵向滑块29的外壁与放料纵向槽的内壁贴合,在放料纵向电动丝杆28工作转动时,放料纵向滑块29会在放料纵向槽中水平滑动。放料纵向槽的上端开口设置,放料纵向电动丝杆28的上方设置有放料横向电动丝杆30,放料横向电动丝杆30与放料纵向电动丝杆28呈十字交叉设置。放料横向电动丝杆30上连接有放料横向滑块31,放料横向电动丝杆30的外侧设置有放料横向槽。放料横向滑块31的外壁与放料横向槽的内壁贴合,在放料横向电动丝杆30进行工作转动时,放料横向滑块31会在放料横向槽中水平进行移动。
参考图1和图3,放料横向槽的底端外壁与放料纵向滑块29的上端固定连接,在放料纵向电动丝杆28进行工作时,会带动放料横向电动丝杆30进行纵向移动。放料横向槽上端开口设置,承装盘3的底端与放料横向滑块31的上端连接,使放料横向电动丝杆30在工作时,会带动承装盘3进行横向移动。通过放料纵向电动丝杆28和放料横向丝杆可以分别使承装盘3沿纵向和横向进行移动,从而使承装盘3的各个放置凹槽均可依次移动到取料吸嘴的正下方进行装料。
参考图1和图2,固定筒17下方的放置台2上设置有圆形通孔,圆形通孔的直径与固定筒17的内径相同。成像摄像头10正下方的工作台1上设置有支撑气缸25,支撑气缸25的活塞杆竖直向上设置。活塞杆的末端设置有支撑块,支撑块位于无影灯环12圆心的正下方,支撑块的上端面与载盘接触。支撑气缸25与PLC控制箱8电性连接,在PLC控制箱8控制制动电机22使固定筒17向上移动的同时,也会控制支撑气缸25的活塞杆向上伸出,使支撑块的上端保持与载盘的下端接触,直到载盘上的晶圆与取料气嘴接触,PLC控制箱8控制制动电机22和支撑气缸25同时停止工作。使在取料吸嘴对晶圆进行接触的时候,支撑块对载盘起到支撑的作用,保证取料吸嘴与晶圆接触紧密,使取料吸嘴可以将晶圆吸起来。
参考图1和图2,支撑块的外侧套置有弱电丝,弱电丝的末端一侧串联有电流表26和供电瓶27,供电瓶27对弱电丝进行供电。在取料移动装置使放置台2进行移动时,固定筒17会随着放置台2一同进行移动,在固定筒17的内侧边缘移动到支撑块处发生接触时,弱电丝与固定筒17接触会放电,这时电流表26会检测到电流。电流表26与PLC控制箱8电性相连,电流表26会给PLC控制箱8发生信号,使PLC控制箱8控制取料移动装置对放置台2进行调整,防止放置台2上的载盘移动出成像摄像机的检测范围,同时防止固定筒17使固定块发生偏移。
本实施例的实施原理为:通过取料纵向电动丝杆13和取料横向丝杆可以分别使载盘沿纵向和横向进行移动,使载盘上的各个晶圆均可以移动到成像摄像头10的正下方进行检测。在显示屏11成像分析到成像摄像头10正下方的晶圆为合格品时,转动电机5会使取料臂6进行转动,使取料臂6的末端移动到成像摄像头10的正下方,从而使取料吸嘴移动到被成像摄像头10检测的晶圆的正上方,对合格的晶圆进行吸取。在取料臂6取料完成以后,转动电机5会使取料臂6的末端移动到承装盘3的上方,再控制气泵7停止工作,使晶圆被放置在承装盘3的放置凹槽中。通过放料纵向电动丝杆28和放料横向丝杆可以分别使承装盘3沿纵向和横向进行移动,从而使承装盘3的各个放置凹槽均可依次移动到取料吸嘴的正下方进行装料。
本具体实施方式的实施例均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
- 一种晶圆全自动取粒机
- 一种晶圆全自动贴膜机