电感器装置及包括其的I/Q电路或集成电路
文献发布时间:2023-06-19 11:32:36
技术领域
本发明涉及电感器装置。这样的电感器装置可以在集成电路中(例如在IC芯片上)实现。这样的电感器装置中的电感器在用合适的驱动信号驱动时产生波动磁场,该磁场可以通过磁耦合影响其他电路,包括影响电感器装置的其他电感器。
背景技术
随着可以实现这样的电感器装置的电路的速度提高以及半导体设备的相应的小型化,精确地操作这样的电路的压力不断增加。这包括解决不必要的磁耦合问题。
发明内容
根据本发明的第一方面的实施方式,提供了一种电感器装置,包括:第一对驱动电感器,其被配置成被驱动以生成基本上反相的磁场,并且相对于彼此被布置成使得它们的磁场在这些电感器之间的第一零线处基本上彼此抵消;以及第二对驱动电感器,其被配置成产生基本上反相的磁场,并且相对于彼此被布置成使得它们的磁场在这些电感器之间的第二零线处基本上彼此抵消,其中,各对驱动电感器相对于彼此被布置成使得第一零线与第二零线彼此交叉,其中,第一对驱动电感器基本上位于第二零线上,并且第二对驱动电感器基本上位于第一零线上。
该电感器装置使得能够减少或去除第一对驱动电感器与第二对驱动电感器之间的磁耦合。
驱动电感器在下述意义上被驱动(例如,通过连接到驱动电路):驱动电感器被配置成由诸如驱动电压信号或电流(例如,AC驱动电流)的驱动信号来驱动。
第一对驱动电感器可以连接在一起以由相同的第一驱动信号来驱动。第二对驱动电感器可以连接在一起以由相同的第二驱动信号来驱动。第一驱动信号与第二驱动信号之间的相位差可以基本上为90度或270度。
第一对驱动电感器和第二对驱动电感器可以被配置成被驱动,使得由第一对的电感器分别生成的第一磁通和第三磁通彼此相等(且相反),并且使得由第二对的电感器分别生成的第二磁通和第四磁通彼此相等(且相反)(使得第一零线和第二零线是直的)。
第一对驱动电感器可以被配置成使得第一零线是直的。第二对驱动电感器可以被配置成使得第二零线是直的。
第一对的驱动电感器和第二对的驱动电感器可以各自具有一个或多个匝。第一对的驱动电感器和第二对的驱动电感器可以是螺旋电感器。第一对驱动电感器可以具有彼此相同的尺寸和匝数。第二对驱动电感器可以具有彼此相同的尺寸和匝数。
驱动电感器的匝的方向可以被配置成使得它们产生它们各自的磁场。第一对驱动电感器可以连接在一起,使得这些驱动电感器产生它们各自的磁场,并且第二对驱动电感器可以连接在一起,使得这些驱动电感器产生它们各自的磁场。
在装置中,第一对的驱动电感器和第二对的驱动电感器的位置可以限定菱形的四个角,第一对的驱动电感器彼此相对。
第一对的驱动电感器和第二对的驱动电感器可以是差分电感器。驱动电感器可以在中心抽头节点处有中心抽头。第一对的驱动电感器的中心抽头节点可以相对于第一零线彼此相对地对称地布置,并且第二对的驱动电感器的中心抽头节点可以相对于第二零线彼此相对地对称地布置。
第一对驱动电感器的中心抽头节点可以基本上位于第二零线上,并且第二对驱动电感器的中心抽头节点可以基本上位于第一零线上。
第一对的驱动电感器的中心抽头节点可以连接在一起,并且第二对的驱动电感器的中心抽头节点可以连接在一起。
驱动电感器可以有正端子和负端子。第一对的驱动电感器的正端子可以连接在一起,并且第一对的驱动电感器的负端子可以连接在一起。第二对的驱动电感器的正端子可以连接在一起,并且第二对的驱动电感器的负端子可以连接在一起。
第一对的驱动电感器的正端子可以彼此位于第二零线的同一侧,并且第一对的驱动电感器的负端子可以彼此位于第二零线的同一侧。第二对的驱动电感器的正端子可以彼此位于第一零线的同一侧,并且第二对的驱动电感器的负端子可以彼此位于第一零线的同一侧。
第一对的每个驱动电感器的正端子和负端子可以彼此位于第二零线的相对侧。第二对的每个驱动电感器的正端子和负端子可以彼此位于第一零线的相对侧。
由第一对电感器和第二对电感器的驱动电感器生成的磁场的各个相位可以基本上正交。
第一对驱动电感器可以连接在一起以由相同的第一驱动信号驱动。第二对驱动电感器可以连接在一起以由相同的第二驱动信号驱动。
第一对的驱动电感器可以被配置成被驱动以分别生成具有第一相位和第三相位的磁场,并且第二对的驱动电感器可以被配置成被驱动以分别生成具有第二相位和第四相位的磁场,并且第一相位至第四相位可以基本上正交。
根据本发明的第二方面的实施方式,提供了一种电感器装置,包括:第一对驱动电感器,其连接在一起以由相同的第一驱动信号驱动,其相对于彼此被配置以生成基本上反相的磁场,并且相对于彼此被布置成使得它们的磁场在这些电感器之间的第一零线处基本上彼此抵消;以及第二对驱动电感器,其连接在一起以由相同的第二驱动信号驱动,其相对于彼此被配置以生成基本上反相的磁场,并且相对于彼此被布置成使得它们的磁场在这些电感器之间的第二零线处基本上彼此抵消,其中,各对驱动电感器相对于彼此被布置成使得第一零线与第二零线彼此交叉,其中,第一对驱动电感器基本上位于第二零线上,并且第二对驱动电感器基本上位于第一零线上。
根据本发明的第三方面的实施方式,提供了一种电感器装置,包括:驱动电感器,其被配置成被驱动电流驱动以生成驱动磁场;辅助回路,其是闭合(或环形)的AC电流路径和/或DC电流路径;以及目标电路,其中,辅助回路位于驱动电感器与目标电路之间。
该电感器装置使得能够减少或去除从驱动电感器到目标电路的磁耦合。
辅助回路可以被实现为电感器。
辅助回路可以被配置成使得在其中感应出的AC电流将(完全地)绕回路循环。
辅助回路在驱动电感器与目标电路之间可以是等距的。驱动电感器、辅助回路以及目标电路可以位于直线上的对应位置处。
辅助回路可以是单匝回路或多匝回路。辅助回路可以由其端部连接在一起的细长导体形成。辅助回路可以包括串联连接以形成回路的至少一个细长导体和至少一个电容器。一个或多个电容器可以被实现为一个或多个导体的端部之间的中断或间隙。中断/间隙的数量和/或尺寸可以被配置成控制该辅助磁场或每个辅助磁场的强度。
辅助回路可以是无电驱动的。辅助回路可以不被AC电信号电驱动。辅助回路可以被配置成电连接到DC电压源(电连接可以是导电连接)。
驱动电感器、辅助回路以及目标电路可以相对于彼此地放置,使得:通过驱动磁场在辅助回路中感应出电流,该感应电流使辅助回路生成与驱动磁场相反的极性(或相反的相位)的辅助磁场;并且辅助磁场在目标电路处与驱动磁场相消干涉,以减少从驱动电感器到目标电路的磁耦合。
驱动电感器可以是第一驱动电感器,驱动电流可以是第一驱动电流,驱动磁场可以是第一驱动磁场,并且目标电路可以是第二驱动电感器,该第二驱动电感器被配置成由第二驱动电流驱动以生成第二驱动磁场。
电感器装置使得能够减少或去除第一驱动电感器与第二驱动电感器之间的磁耦合。
第一驱动电流和第二驱动电流可以具有AC分量,其分别具有第一不同相位和第二不同相位。第一相位和第二相位可能不是反相的。第一相位与第二相位之间的相位差可以基本上为90度或270度。
第一驱动电感器和第二驱动电感器可以具有彼此相同的尺寸和匝数。第一驱动电感器和第二驱动电感器可以是螺旋电感器。
第一驱动电感器、辅助回路以及第二驱动电感器可以相对于彼此地放置,使得:通过第二驱动磁场在辅助回路中感应出电流,该感应电流使辅助回路生成与第二驱动磁场相反的极性(或相反的相位)的第二辅助磁场;并且第二辅助磁场在第一驱动电感器处与第二驱动磁场相消干涉,以减少从第二驱动电感器到第一驱动电感器的磁耦合。
该驱动电感器或每个驱动电感器和/或辅助回路可以在一个或多个平行平面中实现。该驱动电感器或每个驱动电感器和/或辅助回路可以是平面部件。
该驱动电感器或每个驱动电感器以及辅助回路可以是分别包括一个或多个完整的或部分的匝的部件,该完整的或部分的匝限定这些部件的芯轴。该驱动电感器或驱动电感器的至少一个驱动电感器的芯轴和辅助回路的芯轴可以是基本上平行的。
该驱动电感器或每个驱动电感器或驱动电感器中的一个可以是差分电感器。
该驱动电感器或每个驱动电感器的匝的方向可以被配置成使得其产生它的磁场。该驱动电流或每个驱动电流可以被配置成使得对应的驱动电感器产生其磁场。
电感器装置可以在具有一层或更多层的集成电路中实现,并且所述驱动电感器或每个所述驱动电感器以及辅助回路可以各自在仅一个所述层中形成或跨多个所述层形成。
根据本发明的第四方面的实施方式,提供了一种电感器装置,包括:第一驱动电感器,其被配置成由第一驱动电流驱动以生成第一驱动磁场;辅助回路,其是闭合(或环形)的AC电流路径和/或DC电流路径;以及第二驱动电感器,其被配置成由第二驱动电流驱动以生成第二驱动磁场,其中,辅助回路位于第一驱动电感器与第二驱动电感器之间。
电感器装置使能够减少或去除第一驱动电感器与第二驱动电感器之间的磁耦合。
根据本发明的第五方面的实施方式,提供了一种电感器装置,包括:驱动电感器,其被配置成由驱动电流驱动以生成驱动磁场;辅助回路;以及目标电路,其中,驱动电感器、辅助回路以及目标电路相对于彼此地放置,使得:通过驱动磁场在辅助回路中感应出电流,该感应电流使辅助回路生成与驱动磁场相反的极性(或相反的相位)的辅助磁场;并且辅助磁场在目标电路处与驱动磁场相消干涉,以减少从驱动电感器到目标电路的磁耦合。
电感器装置使得能够减少或去除从驱动电感器到目标电路的磁耦合。
驱动电感器可以是第一驱动电感器,驱动电流可以是第一驱动电流,驱动磁场可以是第一驱动磁场,辅助磁场可以是第一辅助磁场,并且目标电路可以是第二驱动电感器,该第二驱动电感器被配置成由第二驱动电流驱动以生成第二驱动磁场。
电感器装置使得能够减小或去除第一驱动电感器与第二驱动电感器之间的磁耦合。
第一驱动电感器、辅助回路以及第二驱动电感器可以相对于彼此地放置,使得:通过第二驱动磁场在辅助回路中感应出电流,该感应电流使辅助回路生成与第二驱动磁场相反的极性的第二辅助磁场;并且第二辅助磁场在第一驱动电感器处与第二驱动磁场相消干涉,以减少从第二驱动电感器到第一驱动电感器的磁耦合。
第一驱动电流和第二驱动电流可以具有AC分量,其分别具有第一不同相位和第二不同相位。第一相位和第二相位可以不是反相的。第一相位与第二相位之间的相位差可以基本上为90度或270度。
电感器装置可以包括被配置成驱动每个驱动电感器的驱动电路。
电感器装置可以在具有一层或更多层的集成电路中实现,并且每个所述电感器可以在仅一个所述层中形成或跨多个所述层形成。
所述磁场可以是波动磁场或交变磁场。
根据本发明的第六方面的实施方式,提供了一种振荡器电路,例如,包括第一方面至第五方面中的任何方面的电感器装置的压控振荡器电路。
根据本发明的第七方面的实施方式,提供了一种I/Q电路,例如,I/Q时钟缓冲器电路或I/Q压控振荡器电路,该I/Q电路包括第一方面至第五方面中的任何方面的电感器装置。
根据本发明的第八方面的实施方式,提供了一种集成电路,例如,包括第一方面至第五方面中的任何方面的电感器装置的IC芯片或者第六方面或第七方面的电路。
以上方面中的任何特征可以应用于以上方面中的任何其他方面。
附图说明
现在将通过示例的方式参照附图,在附图中:
图1是有助于理解本发明的电感器装置的示意图;
图2是有助于理解本发明的电感器装置的示意图;
图3是有助于理解本发明的电感器装置的示意图;
图4是有助于理解本发明的电感器装置的示意图;
图5是示出了第一示例电感器装置的示意图;
图6是示出了该第一示例电感器装置的示意图;
图7是示出了该第一示例电感器装置的示意图;
图8是示出了第二示例电感器装置的示意图;
图9是示出了该第二示例电感器装置的示意图;
图10是示出了该第二示例电感器装置的示意图;
图11是压控振荡器(VCO)电路或时钟缓冲器电路的示意图;
图12是集成电路的示意图;以及
图13是IQ振荡器电路的示意图。
具体实施方式
图1是作为比较示例的电感器装置100的示意图。电感器装置100包括第一电感器110和第二电感器120。电感器110和120可以是变压器的一部分或者甚至是全部,并且以下描述在该情况下同样适用。
例如,电感器110和120在使用中通过由其他电路(未示出)提供的驱动信号来驱动。这些驱动信号使电流在电感器中流动,这在电感器110和120中及其周围生成磁场。换言之,当被驱动时,电感器110和120生成各自的磁场。电感器110和120彼此非常接近地放置,使得它们的磁场彼此相互作用,这将在下面更全面地说明。
图2是电感器装置100的示意图,并且示出了(以简化的示意性形式)给定对应的驱动信号时,由电感器110和120生成的磁场的磁场线。虚线指示由第一电感器110生成的磁场。实线指示由第二电感器120生成的磁场。磁场线可以被称为磁通线。磁通线被表示为围绕电感器110和120的轨道或导体的闭合的环。
由于电感器110和120的非常接近,如图所示,来自第一电感器110的相对强的磁场线到达第二电感器120(并且与第二电感器120耦合)。也就是说,由第一电感器110生成的磁场存在于第二电感器120的位置处。结果,由第一电感器110生成的磁场在第二电感器120中生成反电动势(back-EMF)。所生成的反电动势干扰流过第二电感器120的电流(并且可以影响驱动第二电感器120的驱动信号)。
类似地,如图所示,来自第二电感器120的相对强的磁场线到达第一电感器110(并且与第一电感器110耦合)。也就是说,由第二电感器120生成的磁场存在于第一电感器110的位置处,并且在第一电感器110中生成反电动势,该反电动势干扰流过第一电感器110的电流(并且可以影响驱动第一电感器110的驱动信号)。
由电感器110和120中的一个生成的磁场对流过其他电感器110和120的电流的干扰可以被称为磁耦合,并且导致许多不必要的影响,包括频率牵引、扰动、失真和相位牵引。例如,电感器110和120可以由各自的异相的(例如,异相90度或270度)驱动信号(引起对应的电流)来驱动。在这种情况下,磁耦合可能使由电感器110和120生成的磁场的相位(可以简称为电感器110和120的相位)达到或接近不期望的相位。
电感器110和120可以由具有AC分量的电压信号驱动,该电压信号使AC电流(或具有AC分量的电流)流过电感器,使得每个电感器110和120生成交变磁场(alternatingmagnetic field)或波动磁场。
例如,电感器110和120可以由一组正交电压信号来驱动,方便起见,这些正交电压信号被称为I、/I、Q以及/Q,其中这些正交电压信号具有各自的(相对的)0度、180度、90度以及270度的相位。在该示例中,I信号和/I信号可以被施加到电感器110的各自的端子,并且Q信号和/Q信号可以被施加到电感器120的各自的端子。例如,电感器110和120可以有中心抽头,尽管未示出。
在该示例中,在电感器110和120中流动的合成电流可以异相90度或270度,并且由电感器110和120生成的合成磁场也可以是异相90度或270度。这样的装置可以被称为I/Q装置。
在这种情况下,当电感器110和120在I/Q压控振荡器(VCO)中实现时,其示例在随后描述的图13中示出,I/Q VCO中的正交相位关系可以由于磁耦合而被破坏。也就是说,磁场的相位可能会偏离其理想值,并且在极端情况中,I磁芯和Q磁芯两者可以最终以相同的相位关系或反相关系而非90度或270度的相位差结束。也就是说,例如,由于磁耦合,由第一电感器110生成的磁场的相位可以变成与由第二电感器120生成的磁场的相位相同。
图3和图4是作为比较示例的另一电感器装置200的示意图。图3仅示出了电感器装置200,但是图4另外示出了磁场线。电感器装置200包括第一电感器210和第二电感器220。图1和图2所示的关于电感器装置100的以上描述类似地适用于图3和图4所示的电感器装置200。电感器装置200的电感器相较于电感器装置100的电感器之间的差异是电感器装置200的电感器被示为具有多匝(在该示例的情况下为三匝)。
相比于图4,图3还包括连接到两个电感器的振荡器核心电路的示意性表示(成箱盒形式),例如以形成诸如图13中的I/Q压控振荡器(VCO)。
电感器110、120、210和220可以是差分电感器或非差分电感器,并且以上描述在两种情况下同样适用。
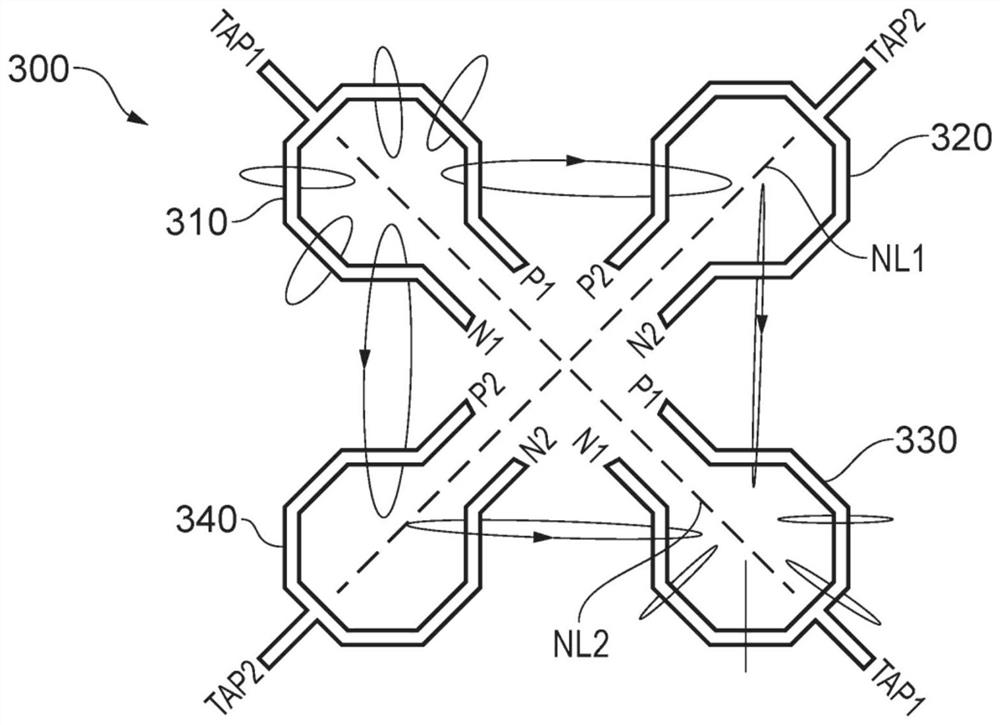
图5是体现本发明的第一示例电感器装置300的示意图。
电感器装置300包括第一电感器至第四电感器310、320、330和340。第一电感器310和第三电感器330可以被称为第一对电感器,并且第二感器320和第四电感器340可以被称为第二对电感器。在本示例中,电感器310、320、330和340是差分电感器。第一电感器至第四电感器310、320、330和340分别在第一中心抽头节点至第四中心抽头节点313、323、333和343处有中心抽头。第一电感器至第四电感器310、320、330和340具有各自的第一正节点至第四正节点311、321、331和341(正端子)以及各自的第一负节点至第四负节点312、322、332和342(负端子)。
第一中心抽头节点313和第三中心抽头节点333连接在一起(其在图5中由标签“TAP1”指示),并且第二中心抽头节点323和第四中心抽头节点343连接在一起(其在图5中由标签“TAP2”指示)。
第一正节点311和第三正节点331连接在一起(其由图5中的标签“P1”指示),并且第二正节点321和第四正节点341连接在一起(其由图5中的标签“P2”指示)。第一负节点312和第三负节点332连接在一起(其由图5中的标签“N1”指示),并且第二负节点322和第四负节点342连接在一起(其由图5中的标签“N2”指示)。
类似于参照电感器装置100的以上示例,电感器310、320、330和340可以由一组正交电压信号来驱动,方便起见,这些正交电压信号被称为I、/I、Q以及/Q,其中这些正交电压信号具有各自的(相对的)0度、180度、90度和270度相位。在该示例中,例如,I信号和/I信号可以被施加到各自的端子P1和N1,并且Q信号和/Q信号可以被施加到各自的端子P2和N2。
在该示例中,类似于之前,在电感器310和330中流动的合成电流可以与在电感器320和340中流动的合成电流异相90度或270度,其中,由电感器310和330生成的合成磁场基本上是反相的,由电感器320和340生成的合成磁场基本上是反相的,并且由电感器310和330生成的合成磁场与由电感器320和340生成的合成磁场异相90度或270度。这样的装置又可以被称为I/Q装置。
I信号、/I信号、Q信号和/Q信号可以被称为驱动电压信号或驱动信号。驱动电感器的合成电流可以被称为驱动电流或也称为驱动信号。电感器310、320、330和340可以被称为驱动电感器,因为它们被配置成被驱动以生成它们各自的磁场。
如下可以更好地理解以上操作。
由于电感器310、320、330和340的中心抽头、正节点与负节点的连接,第一对的电感器310和330由相同的电流或驱动信号(例如,第一驱动信号,该第一驱动信号可以被认为应用于I和/I的组合)来驱动,并且第二对的电感器320和340由相同的电流或驱动信号(例如,第二驱动信号,该第二驱动信号可以被认为应用于Q和/Q的组合)来驱动。
由于电感器310、320、330和340的中心抽头、正节点与负节点之间的连接,并且由于电感器的绕组或导体的方向,由第一电感器310生成的磁场在任何时刻具有与由第三电感器330生成的磁场的相位相反或反相的相位(并且磁场具有相反的极性),并且由第二电感器320生成的磁场在任何时刻具有与由第四电感器340生成的磁场的相位相反或反相的相位(并且磁场具有相反的极性)。
还由于电感器310、320、330和340的中心抽头、正节点与负节点之间的连接,并且由于电感器的尺寸和匝数,由第一电感器310生成的磁场在第一对的电感器310与330之间的对称线处的强度等于由第三电感器330生成的磁场,并且由第二电感器320生成的磁场在第二对的电感器320和340之间的对称线处的强度等于由第四电感器340生成的磁场。也就是说,第一电感器310中的电流在第一电感器310处生成的磁通量与由第三电感器330中的电流在第三电感器330中生成的磁通量相等(并且相反)。并且第二电感器320中的电流在第二电感器320处生成的磁通量与由第四电感器340中的电流在第四电感器340中生成的磁通量相等(并且相反)。在电感器310、320、330和340处的磁通量在这里可以同样地被认为是由该电感器310、320、330和340生成的。换言之,由第一对的电感器310和330分别生成的第一磁通量和第三磁通量彼此相等(并且相反),并且由第二对的电感器分别生成的第二磁通量和第四磁通量彼此相等(并且相反)。
当然,应当理解的是,电感器不必是中心抽头的电感器,在这种情况下,将不提供中心抽头节点TAP1和TAP2。在这样的情况下,第一电感器310和第三电感器330不需要在中心抽头节点TAP1处连接在一起,并且第二电感器320与第四电感器340不需要在中心抽头节点TAP2处连接在一起。
因此,由第一电感器310生成的磁场与由第三电感器330生成的磁场相等且相反,并且这些磁场沿直接在第一电感器310与第三电感器330之间且与它们等距的第一零线NL1彼此抵消。类似地,由第二电感器320生成的磁场与由第四电感器340生成的磁场相等且相反,并且这些磁场沿直接在第二电感器320与第四电感器340之间且与它们等距的第二零线NL2彼此抵消。当然,零线NL1和零线NL2在任一方向延伸,并且为简单起见在图5中仅示出为相对的短。
例如,第一相位和第三相位可以是0度和180度。例如,第二相位和第四相位可以是90度和270度。在该情况下,第一相位至第四相位是正交的,这便于在IQ电路中使用,但这不是必需的。例如,第一相位至第四相位可以分别为0度、45度、180度和225度。第一相位和第三相位可以分别与第二相位和第四相位基本上相同。第一相位至第四相位有很多可能的相位,并且以上列出并不详尽。
第一对电感器310和330位于(或被定位)在第二零线NL2上,并且第二对电感器320和340位于第一零线NL1上。因此,由第一电感器310生成的磁场在第二对电感器320和340(的位置)处的作用基本上被由第三电感器330生成的磁场在第二对电感器320和340(的位置)处的作用抵消或至少减小了。类似地,由第二电感器320生成的磁场在第一对电感器310和330(的位置)处的作用基本上被由第四电感器340生成的磁场在第一对电感器310和330(的位置)处的作用抵消或至少减小了。这减小了第一对电感器310、330与第二对电感器320、340之间的耦合。
图6是图5所示的第一示例电感器装置300的示意图,并且另外示出了由第一对的电感器310和330生成的磁场的磁场线。正节点、负节点以及中心抽头节点的附图标记未在图6中示出以避免使图6过于复杂。
在用于理解第一示例电感器装置300的具体实现中,驱动第一电感器310的电流在特定时刻沿逆时针方向在第一电感器310中流动。结果,在该时刻由第一电感器310生成的磁场被引出图6的页面(如磁场线所示)。在该时刻,驱动第三电感器330的电流沿顺时针方向在第三电感器330中流动。因此,由第三电感器330生成的磁场被引入到图6中的页面中(如磁场线所示)。因为磁场具有相反的相位/极性,其在第二对的电感器320和340的位置处相消干涉,从而出现零线NL1。电感器310、320、330和340的相对彼此的位置确保第二对的每个电感器320和340与第一对的电感器310和330两者等距,从而等于来自第一对的电感器310和330两者的磁场幅度(或强度或力度)。结果,磁耦合显著减少(或甚至抵消)。
对应的描述适用于由第二对的电感器320和340生成的磁场对第一对的电感器310和330的作用,尽管为简单起见在图6中未示出。
图7是示出了第一示例电感器装置300的透视图的示意图,示出了同在图6中示出的磁场线。因此,图7类似于图6,并且省略重复的描述。正节点、负节点以及中心抽头节点的附图标记和标号在图7中也未示出,以避免使图7过于复杂。
比较电感器装置100和第一示例电感器装置300,第一对电感器310和330可以被认为表示被分成两个并联电感器的第一电感器110。类似地,第二对电感器320和340可以被认为表示被分成两个并联电感器的第二电感器120。
在电感器装置300中,电感器310、320、330和340相对于彼此地放置,使得它们的中心抽头节点313、323、333和343背离彼此,即面向“外部”。在第一示例电感器装置300的修改中,每对电感器被放置成使得对于给定对,中心抽头节点关于它们的零线彼此相对地对称地布置。也就是说,第一对的电感器310和330的中心抽头节点313和333关于第一零线NL1彼此相对地对称地布置,并且第二对的电感器320和330的中心抽头节点323和343关于第二零线NL2彼此相对地对称地布置。
在第一示例电感器装置300的修改中,第一对的电感器310和330的正端子彼此位于第二零线NL2的同一侧,并且第一对的电感器310和330的负端子彼此位于第二零线NL2的同一侧。替选地或另外地,第二对的电感器320和340的正端子彼此位于第一零线NL1的同一侧,并且第二对的电感器320和340的负端子彼此位于第一零线NL1的同一侧。
在电感器装置300中,电感器310、320、330和340被示出且描述为具有中心抽头的差分电感器。在第一示例电感器装置300的修改中,电感器310、320、330和340是没有中心抽头的差分电感器。在第一示例电感器装置300的进一步修改中,电感器310、320、330和340是非差分电感器。以上关于电感器310、320、330与340之间的减小的耦合的描述在任何情况下都同样适用。
在示例装置300中,电感器310、320、330和340被示出且描述为相对于彼此地放置,使得它们的中心限定正方形的四个角。在第一示例电感器装置300的修改中,电感器310、320、330和340相对于彼此地放置,使得第一零线NL1和第二零线NL2交叉,并且使得第一对的电感器310和330基本上位于第二零线NL2上,以及第二对的电感器320和340基本上位于第一零线NL1上(但不一定使得它们的中心限定正方形的四个角)。例如,电感器310、320、330和340可以被定位成使得它们的中心限定菱形的四个角。
在示例装置300中,电感器310、320、330和340可以被认为是“相同的”(即,彼此具有相同的尺寸和匝数)并且由相同的电流(即,相同大小的电流)“驱动”。在第一示例电感器装置300的修改中,第一对的电感器310和330彼此相同并且由相同的电流驱动,并且第二对的电感器320和340彼此相同并且由彼此相同的电流驱动,但是第一对的电感器310和330与第二对的电感器320和340不相同和/或不由相同的电流驱动。在第一示例电感器装置300的进一步修改中,给定对的电感器彼此不相同并且不由相同的电流驱动,但是仍然产生磁场,使得由该对的一个电感器310、320、330和340产生的磁场与由该对的其他电感器310、320、330和340产生的磁场具有相同的强度。在这种情况下,因为如上所述磁场彼此具有相同的强度(和/或空间分布),所以该给定对的电感器310、320、330和340之间的零线是直的。
在第一示例电感器装置300的修改中,由该对的一个电感器310、320、330和340产生的磁场与由该对的其他电感器310、320、330和340产生的磁场具有不同的强度。在这种情况下,尽管该给定对的电感器310、320、330与340之间的零线不是直的,在这样的修改示例装置中,电感器310、320、330和340仍然相对于彼此地放置,使得第一对的电感器310和330基本上位于第二零线NL2上,并且第二对的电感器320和340基本上位于第一零线NL1上。因此,减小了磁耦合的作用。
由电感器310、320、330和340产生的磁场的相位取决于生成该磁场的电感器的绕组方向以及驱动该电感器的电流。应当理解的是,无论每对的电感器是否如对第一示例电感器装置300描述的那样连接在一起,电感器装置300都可以被驱动以及/或者电感器绕组的方向可以相应地被设置以产生具有上述相位的磁场。电感器310、320、330和340被示为每个具有单匝。电感器310、320、330和340可以具有多匝。由电感器310、320、330和340生成的每个磁场的强度(力度)取决于电感器310、320、330和340的尺寸和匝数以及驱动电感器310、320、330和340的电流,这可以被相应地设置以产生具有特定强度的磁场。
在第一示例电感器装置300及其相关的修改中的任何一个中,给定对(或两对中的)的电感器310、320、330和340可以不如上所述地连接。无论电感器310、320、330和340是否如上所述连接,驱动电感器的电流都可以被设置为与如上所述的相同或不同。
图8是实现本发明的第二示例电感器装置400的示意图。
电感器400包括第一驱动电感器410,第二驱动电感器430以及辅助回路450。第一驱动电感器410和第二驱动电感器420被配置成分别由第一驱动信号和第二驱动信号驱动(这使得对应的驱动电流流过这些电感器)。
也就是说,第一驱动电感器410和第二驱动电感器420(以及本文中的其他驱动电感器)被配置成由驱动电路(未示出)电驱动,即通过至这些电感器的导电连接(允许电容连接)而不是通过磁感应。本文中公开的电感器装置可以被理解为包括这种驱动电路(或者可以单独地提供驱动电路用于连接到电感器装置)。驱动电流的具体的来源取决于实现电感器装置的电路,并且对于本公开内容的目的而言并不重要。
如前所述,驱动信号(电压/电流)可能具有AC分量,使得所生成的磁场也是如此。
辅助回路450可以被认为包括连接在一起的端子。具体地,辅助回路450是或限定了闭合AC电流路径和/或DC电流路径。辅助回路450基于下述意义也可以被称为环形AC电流路径和/或DC电流路径,其中感应的AC电流和/或DC电流将在辅助回路的回路周围循环。辅助回路450形成闭合的回路并且可以被称为闭合回路,或被称为回路,或被称为回路结构,并且在本示例中形成环形状或回路形状。辅助环路450可以被实现为电感器,并且在这个意义上可以被称为闭合回路电感器或回路电感器或电感器结构。
在驱动电感器的意义上,辅助回路450没有被配置成由AC驱动电流来驱动。也就是说,除了借助于由第一驱动电感器和第二驱动电感器产生的磁场(如下文更充分地描述,即通过感应)之外,辅助回路450不由AC电流驱动。换言之,辅助回路450不由图8中未示出的电路提供的任何AC电流驱动,并且可以被描述为非电驱动的。在这个意义上,辅助回路450是“非驱动的”,并且在被实现为电感器时可以被称为非驱动的电感器或非电驱动的电感器。辅助回路450可以连接到DC电压源,以偏置其电压而不是使其保持“浮动”。辅助回路450可以浮动或连接到固定电位。辅助回路450可以被称为磁阱或导电环或导电回路。
与之前类似,电感器410和420可以由一组正交电压信号驱动,方便起见,该组正交电压信号被称为I、/I、Q和/Q,其中这些正交电压信号具有各自的(相对的)0度、180度、90度和270度相位。在该示例中,I信号和/I信号可以被施加到电感器410的各个端子,并且Q信号和/Q信号可以被施加到电感器420的各个端子。例如,电感器410和420可以有中心抽头,尽管未示出。
在该示例中,在电感器410和420中流动的合成电流可以异相90度或270度。因此,由电感器410和420生成的合成磁场也可以异相90度或270度。这样的装置可以被称为I/Q装置。
图8示出了由第一驱动电感器410产生的第一驱动磁场的磁场线。如图8中的场线所示,第一驱动磁场存在于第二驱动电感器420和辅助回路450的位置处。第一驱动磁场在辅助回路450中感应出电流,该电流可以被称为第一辅助电流。也就是说,第一驱动磁场的磁通量耦合到辅助回路450,从而在辅助回路450中引起反电动势,这使得第一辅助电流在辅助回路450中流动。在辅助回路450中感应出的第一辅助电流然后在辅助回路450中产生或生成第一辅助磁场。也就是说,由于第一辅助电流在由第一驱动磁场感应出的辅助回路450中流动,因此辅助回路450生成第一辅助磁场。
根据伦茨定律,由辅助回路450产生的第一辅助磁场具有与第一驱动磁场相反的极性(即,第一驱动磁场与第一辅助磁场具有相反的相位)。因此,第一驱动磁场与第一辅助磁场在第二驱动电感器420(的位置)处相消干涉。因此,减小了由于从第一驱动电感器410至第二驱动电感器420的耦合的作用。电感器410、420以及辅助回路450的尺寸以及它们关于彼此的相对位置被设置成使得在第二驱动电感器420(的位置)处的第一驱动磁场的作用至少部分地被在第二驱动电感器420(的位置)处的第一辅助磁场的作用抵消(并且优选地,尽可能多地抵消)。
图9是第二示例电感器装置400的示意图。图9与图8相同,除了图9另外示出了第一辅助磁场的磁场线。
图10是第二示例电感器装置400的示意图。图10示出了第二驱动磁场的磁场线和第二辅助磁场的磁场线。由于第二驱动电流驱动第二驱动电感器420,因此由第二驱动电感器420产生第二驱动磁场。类似于第一驱动磁场和第一辅助磁场的以上描述,第二驱动磁场在辅助回路450中感应出第二辅助电流,第二辅助电流产生第二辅助磁场。也就是说,辅助回路450被配置成具有借助于由第二驱动电感器420产生的第二驱动磁场而通过其感应出的第二辅助电流,并且由此产生第二辅助磁场。第二辅助磁场和第二驱动磁场具有相反的极性,即,彼此相反的相位,并且因此在第一驱动电感器410(的位置)处相消干涉。因此,减少了由于从第二驱动电感器420至第一驱动电感器410的耦合的作用。电感器410、420以及辅助回路450的尺寸以及它们关于彼此的相对位置被设置成使得在第一驱动电感器410(的位置)处的第二驱动磁场的作用至少部分地被在第一驱动电感器410(的位置)处的第二辅助磁场的作用抵消(并且优选地,尽可能多地抵消)。
在第一驱动磁场和第二驱动磁场以及第一辅助磁场和第二辅助磁场的以上描述中,应当理解的是,因为驱动信号和电流具有AC分量,则磁场将交替或波动。因此,在图8至图10(以及在其他示出了具有方向的场线的图中)中,将理解的是,场线方向随时间交替。
尽管未在图8至10中示出,以避免使它们过于复杂,但是第一驱动磁场和第二驱动磁场以及第一辅助磁场和第二辅助磁场同时存在(尽管第一驱动磁场和第一辅助磁场可能与第二驱动磁场和第二辅助磁场异相90度或270度,如前所述),并且因此第一驱动电感器410与第二驱动电感器420之间的耦合(相互)减少或抵消。应该理解的是,第一驱动磁场和第一辅助磁场不需要与第二驱动磁场和第二辅助磁场异相90度或270度。
图10所示的辅助回路450在其导体中包括中断451或间隙452,其对应于与导体的部分串联或沿导体串联的电容器。可以设置(控制)这些中断的数量和/或尺寸,以控制第一辅助磁场和第二辅助磁场的力度(即强度),例如,以减少第一驱动电感器410与第二驱动电感器420之间的磁耦合。控制中断的数量和/或尺寸等效于控制串联电容,并且因此控制AC性能。
已经将第二示例电感器装置400描述为包括两个驱动电感器410和420。在第二示例装置400的修改中,第二驱动电感器420是目标电路。在这种情况下,在目标电路420(的位置)处的第一驱动磁场的作用被在目标电路420(的位置)处的第一辅助磁场的作用抵消。因此,可能不希望受磁场影响的目标电路420的操作(例如,来自第一驱动磁场的耦合),能够基本上不受该磁场影响(或受其影响减小)地进行操作。目标电路420可以是电感器。如前所述,目标电路420可以是驱动电感器,但是在某些应用中,由目标电路420在第一驱动电感器410处生成的磁场的作用可能并不重要。用更简单的术语来说,在某些情况下,由第二驱动电感器420生成的第二驱动磁场在第一驱动电感器410处的作用可能并不重要。因此,可以相应地设置第一驱动电感器410和第二驱动电感器420以及辅助回路450的相对位置和尺寸。
在第二示例电感器装置400中,辅助回路450位于第一驱动电感器410与第二驱动电感器420之间并与之等距,并且第一驱动电感器410和第二驱动电感器420以及辅助回路450位于沿直线的各自位置处。在第二示例装置400的修改中,第一驱动电感器410和第二驱动电感器420以及辅助回路450关于彼此的相对位置可以不同于图8至图10所示的位置。例如,辅助回路450可以位于第一驱动电感器410与第二驱动电感器420之间,但是第一驱动电感器410和第二驱动电感器420以及辅助回路450可以不位于沿直线的各自位置处。替选地或另外地,辅助回路450可以与第一驱动电感器410和第二驱动电感器420不等距(例如,在第一驱动电感器410与第二驱动电感器420彼此不同时)。
应当理解的是,在包括目标电路450的修改示例中(或者其中由第二驱动电感器420生成的第二驱动磁场在第一驱动电感器410处的作用不重要的修改示例),相对位置甚至受更少限制。
在第二示例电感器装置400中,辅助回路包括中断451和452。在第二示例电感器装置400的修改中,辅助回路450的导体可以不包括中断,或者包括任何数量的中断。如上所述,辅助回路450是闭合的(或环形的)AC电流路径和/或DC电流路径。更具体地,在辅助回路450在其导体中包括一个或多个中断451或间隙452时,辅助回路450是闭合的(或环形的)交流电流路径。在辅助回路450在其导体中不包含任何中断451或间隙452(即,不包括电容器)时,辅助回路450是闭合的(或环形的)AC电流路径和/或DC电流路径。
第一驱动磁场和第二驱动磁场的强度(力度和/或场分布)取决于许多因素,包括第一驱动电流和第二驱动电流以及第一驱动电感器410和第二驱动电感器420的匝数和尺寸。第一辅助磁场和第二辅助磁场的强度(力度)取决于许多因素,包括第一驱动电流和第二驱动电流,第一驱动电感器410和第二驱动电感器420以及辅助回路450的匝数和尺寸,以及第一驱动电感器410和第二驱动电感器420与辅助回路450的相对位置。在实践中,为了最佳性能,第二示例电感器装置400的元件的确切尺寸和相对位置可以通过执行仿真来设置。
在一些实现方式中,对于如前面提到的IQ操作,第一驱动磁场与第二驱动磁场的相位之间的相位差基本上为90度或270度。第一驱动磁场和第二驱动磁场的相位可以彼此相同。当然,其他相位差也是可能的。
在第二示例电感器的修改中,第一驱动电感器410和第二驱动电感器420是差分电感器。
第一驱动电感器410和第二驱动电感器420在图8至图10中示出为具有多匝。第一驱动电感器410和第二驱动电感器420可以具有任意数量(包括一个)的匝数,并且它们可以具有彼此不同的匝数。第一驱动磁场和第二驱动磁场的强度(力度和/或场分布)可以彼此相同或不同。
应当理解的是,第一示例电感器装置300或第二示例电感器装置400(或任何相关的修改)可以在振荡器(例如VCO)或时钟缓冲器电路800中实现,如图11所示。VCO或时钟缓冲器电路800可以是I/Q电路。
本发明的电路可以被实现为集成电路,例如,在诸如倒装芯片的IC芯片上。本发明扩展到如上所述的集成电路和IC芯片,包括这样的IC芯片的电路板,以及包括这样的电路板的这种的网络的网络设备以及通信网络(例如,互联网光纤网络和无线网络)。
图12是包括VCO或时钟缓冲器电路800的集成电路900的示意图。
图13是包括电感器装置300或400的I/Q振荡器电路100(其可以被实现为VCO,尽管未明确示出)的示意图,便于更好地理解本发明的可能的应用。为了与前面提到的示例保持一致,在电路100的输出节点上示出了一组正交电压信号,其方便地被称为I、/I、Q和/Q,并因此被施加到前述装置300或400的电感器的端子。技术人员将理解的是,在两个振荡器单元的尾节点处的变压器耦合使得能够进行IQ操作。I/Q电路100因此包括第二示例电感器装置400的第一驱动电感器410和第二驱动电感器410(以及未示出的辅助回路450),或者第一对电感器310和330以及第二对电感器320和340(应理解为,每一对都可以被认为是被分成两个并联电感器的一个电感器)。图13是示意图,并且未示出电感器的真实的相对位置,这对应于图5和图8中所示的相对位置。
可以在本文中公开的本发明的精神和范围内提供其他实施方式。
- 电感器装置及包括其的I/Q电路或集成电路
- 在包括两个具有不同直径的电感器的集成电路中实施增益级的电路和方法