基于RFID数字化路面的定位系统及方法
文献发布时间:2023-06-19 11:32:36
技术领域
本发明属于车辆定位技术领域,具体涉及一种基于RFID数字化路面的定位系统及方法。
背景技术
目前定位技术主要是使用卫星对某物进行准确定位即卫星定位,常见的有美国GPS卫星导航系统、欧洲“伽利略”卫星导航系统、中国“北斗”卫星导航系统。其缺点是必须保证在任意位置、任意时刻都同时观测到四颗卫星,才能达到可靠地精确性和准确度。且精确度决定于卫星的数量,数量越多精确度越高。投入和功耗巨大,且从部署到使用周期时间长且涉及领域多。
发明内容
本发明要解决的技术问题是:提供一种基于RFID数字化路面的定位系统及方法,精度高且成本低。
本发明为解决上述技术问题所采取的技术方案为:一种基于RFID数字化路面的定位系统,本定位系统包括沿道路中线等距离设置的RFID标签,以及设置在车辆上的至少2组天线阵列、无线基站、RFID读卡器和数据处理器;其中,
RFID标签中记录有所在位置的大地坐标;相邻的RFID标签之间的距离大于车长;
RFID读卡器对所述的RFID标签激发信号,并读取RFID标签记录的大地坐标;
每组天线阵列用于分别读取RFID标签与本天线阵列形成的角度;
无线基站用于测量各组天线阵列接收同一个RFID标签信号的时间;
车载罗盘用于测量车辆自身的偏移角度;
数据处理器根据RFID读卡器、天线阵列和无线基站采集的数据,结合各组天线阵列之间的距离,通过空间解析得到车辆坐标;融合车辆自身的偏移角度,计算出车辆相对于道路的偏移角度。
按上述方案,所述的天线阵列包括分别在车头和车尾根据车宽平均分布的3组天线阵列,沿车宽方向均布在车辆的车头大灯下部和车尾灯的下部。
一种利用所述的基于RFID数字化路面的定位系统实现的定位方法,本方法包括以下步骤:
S1、车辆在沿道路中线等距离铺设有RFID标签的道路上行驶,利用RFID读卡器对RFID标签激发信号,并读取RFID标签记录的大地坐标;利用天线阵列读取RFID标签与各天线阵列形成的角度;同时利用无线基站测量各组天线阵列接收同一个RFID标签信号的时间;
S2、根据各组天线阵列接收同一个RFID标签信号的时间差,计算出RFID标签到达每一组天线阵列的距离;结合各组天线阵列之间的距离、RFID标签与各天线阵列形成的角度、以及RFID标签位置的大地坐标,通过空间解析计算各组天线阵列的大地坐标,从而得到车辆的位置信息;融合车辆自身的偏移角度,计算出车辆相对于道路的偏移角度。
按上述方法,
所述的天线阵列包括在车头的3组和车尾的3组,分别为第一天线阵列
S1中,采用车头处的第一天线阵列
S2中计算第一天线阵列
设第一天线阵列
同理得到车尾处的第一天线阵列
根据计算得到的l
按上述方法,设第i天线阵列
按上述方法,设第二天线阵列
按上述方法,利用基于模糊理论的ABC-RBF神经网络算法将车载罗盘和计算出的车辆偏移角度数据进行处理,得到车辆偏移角θ
车辆相对于道路的偏移角度的计算为θ
本发明的有益效果为:利用铺设在路面上的已经写有位置信息的RFID标签,当车辆经过时,读取RFID标签的数据,然后根据车辆中天线阵列的位置,即可得到车辆准确的定位信息,在保证车辆定位精确灵敏的同时,减少投入成本。
附图说明
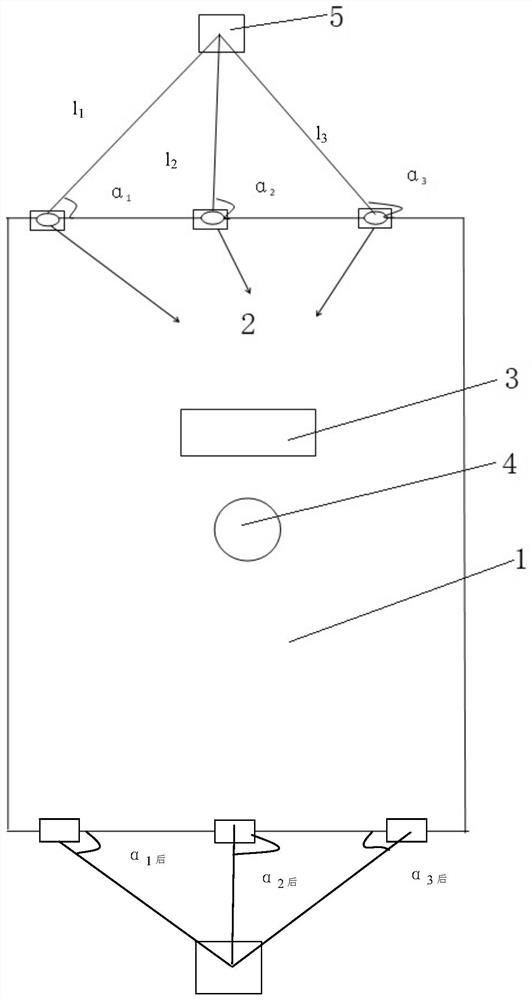
图1为本发明一实施例的应用示意图。
图2为基于模糊理论的ABC-RBF神经网络算法的架构图。
图3为模糊化层与反模糊化层的运算过程图。
图4为车辆相对于道路的偏移角度原理图。
图中:1-车辆,2-天线阵列,3-数据处理器,4-无线基站和RFID读卡器,5-RFID标签。
具体实施方式
下面结合具体实例和附图对本发明做进一步说明。
本发明提供一种基于RFID数字化路面的定位系统,如图1所示,包括沿道路中线等距离设置的RFID标签5,以及设置在车辆1上的至少2组天线阵列2、无线基站和RFID读卡器4,以及数据处理器3;其中,RFID标签5中记录有所在位置的大地坐标(X,Y);相邻的RFID标签之间的距离大于车长;RFID读卡器对所述的RFID标签5激发信号,并读取RFID标签5记录的大地坐标;每组天线阵列2用于分别读取RFID标签5与本天线阵列2形成的角度;无线基站用于测量各组天线阵列接收同一个RFID标签信号的时间;数据处理器3根据天线阵列2、无线基站和RFID读卡器4采集的数据,结合各组天线阵列2之间的距离,通过空间解析得到车辆坐标。融合车辆自身的偏移角度,计算出车辆相对于道路的偏移角度。
本实施例中,所述的天线阵列2包括分别在车头和车尾根据车宽平均分布的3组天线阵列,沿车宽方向均布在车辆1的车头大灯下部和车尾灯的下部。相邻的天线阵列2之间的距离为定值d。其中,车头的天线阵列为第一天线阵列
一种利用所述的基于RFID数字化路面的定位系统实现的定位方法,本方法包括以下步骤:
S1、车辆在沿道路中线等距离铺设有RFID标签的道路上行驶,利用RFID读卡器对RFID标签激发信号,并读取RFID标签记录的大地坐标;利用天线阵列读取RFID标签与各天线阵列形成的角度;同时利用无线基站测量各组天线阵列接收同一个RFID标签信号的时间。
本实施例中所述的天线阵列包括在车头的3组和车尾的3组,分别为第一天线阵列
采用车头处的第一天线阵列
S2、根据各组天线阵列接收同一个RFID标签信号的时间差,计算出RFID标签到达每一组天线阵列的距离;结合各组天线阵列之间的距离、RFID标签与各天线阵列形成的角度、以及RFID标签位置的大地坐标,通过空间解析计算各组天线阵列的大地坐标,从而得到车辆的位置信息。
具体的,计算第一天线阵列
设第一天线阵列
同理得到车尾处的第一天线阵列
根据计算得到的l
设第i天线阵列
为了使测量的车辆偏移角度更加准确,利用几何原理计算出车辆的偏移角度,将根据计算的车辆偏移角度与电子罗盘测量的角度进行融合计算,使得结果更加准确。
如图4所示,设第二天线阵列
利用基于模糊理论的ABC-RBF神经网络算法将车载罗盘和计算出的车辆偏移角度数据进行处理,得到车辆偏移角θ
ABC-RBF神经网络算法流程如图2和图3所示:开始→输入初始化车载罗盘和计算出的车辆偏移角度数据→随机产生初始蜜源→确定位置标记→搜索蜜源并更改标记的蜜源→没有出现侦查蜂→输出作为RBF的初始化参数→输入训练样本→模糊化处理→计算隐层神经元输出→反模糊化处理→加权计算输出输出层→计算输出层误差→修正参数→输出结果。所述的训练样本是ABC算法计算出的中心参数、宽度参数和权值。
本发明的工作原理为:首先,RFID读卡器对地面RFID标签5激发信号,利用天线阵列2读取RFID标签5与天线阵列2形成的角度;绕后利用无线基站测量天线阵列读取RFID标签5信号的时间;数据处理器用于数据处理,首先通过计算同组天线阵列接收到的前后时差再计算出车头的天线阵列距离RFID标签的位置,通过解析达到具体坐标。融合车辆自身的偏移角度,计算出车辆相对于道路的偏移角度。
本发明获得车辆在路面的定位信息,使车辆定位精确的同时,减少投入成本,本发明结构简单、便于安装,地面设备也容易铺设。
以上实施例仅用于说明本发明的设计思想和特点,其目的在于使本领域内的技术人员能够了解本发明的内容并据以实施,本发明的保护范围不限于上述实施例。所以,凡依据本发明所揭示的原理、设计思路所作的等同变化或修饰,均在本发明的保护范围之内。
- 基于RFID数字化路面的定位系统及方法
- 一种基于RFID技术的数字化安全输液装置及方法