用于变速风力发电机的命令滤波反步控制方法及控制器
文献发布时间:2023-06-19 11:34:14
技术领域
本发明涉及一种命令滤波反步控制方法,更具体地说,涉及一种用于变速风力发电机的命令滤波反步功率信号反馈控制方法及利用该控制方法的控制器。
背景技术
随着大气污染的日益加剧和传统化石燃料短缺造成的能源危机,以风能为代表的清洁可再生能源的利用获得了广泛的关注。风能转换系统(Wind Energy ConversionSystems,WECSs)将风能转化为电能,其主要部件是风力发电机组。风力发电机组包括定速风力涡轮机和变速风力发电机。当风速小于额定风速时,变速风力发电机能够随着风速的变化改变涡轮转速,获得每一个风速下的最大可能功率。由于风力发电机组在其使用寿命的相当一部分时间内都是在低于额定风速的情况下运行,因此变速风力发电机会捕获大量额外的能量。因此,变速风力发电机是目前主要的新装机型。
风力发电机传动系统由将风力驱动的旋转动能转化为电能的部件组成,是风力发电机中造成故障率最高的部件,因此确保传动系统的可靠性对防止风力发电机停机至关重要。随着风力发电机的功率和尺寸的增加,需要的力和扭矩也相应的增加,这使传动系统产生了较大的扭转行为。现有的动态模型大部分考虑集中的单质量传动系统动力学(即认为发电机与涡轮机连轴是刚性的,将两者看成一个整体,将两者的转动惯量经过折算得到总转动惯量建立的动力学)利用线性控制方法设计功率信号反馈控制器,忽略了所有的扭转行为对发电机组动态响应的影响,具有响应速度慢,控制精度低的问题。并且高阶系统利用传统反步控制方法通过递归构造闭环系统的Lyapunov函数来获得反馈控制器时,因为需对虚拟控制信号的重复微分,导致复杂性爆炸问题。
另外,最大功率点跟踪问题就是当变速风力发电系统在低速段(即风速在切入风速和额定风速之间)工作时的最大风能捕获问题,是利用变速风力发电机提高风能捕获效率的关键控制问题。常用的控制方法主要有:叶尖速比控制、最优转矩控制、功率信号反馈控制和干扰与观测方法。功率信号反馈控制是在最优转矩控制的基础上发展而来的,与最优转矩控制不同的是其反馈信号和参考信号是有功功率而不是转矩。
传统的功率信号反馈控制器通过仿真和现场测试产生最大输出功率特性以查表的形式存储在内存中,或者利用基于修正摄动观察方法的最优功率-速度曲线动态标定方法,以改进基于功率信号反馈的最大功率点跟踪控制方法。然而上述方法都是针对集中的单质量传动系统动力学设计的。基于功率反馈控制的最大功率点跟踪控制方法在采用传动系柔性轴模型的闭环系统上的动态影响,在现有的文献中没有涉及。
发明内容
针对现有技术存在的上述缺点,本发明一方面的目的在于提供一种用于变速风力发电机的命令滤波反步控制方法。该命令滤波反步控制方法针对变速风力发电机,考虑其两质量柔性轴模型,利用命令滤波反步控制方法设计功率信号反馈控制器,实现对变速风力发电机传动系统最大功率点的跟踪。
为达到上述目的,本发明提供的变速风力发电机的命令滤波反步控制方法,通过引入两质量模型来描述变速风力发电机传动系统的动态特性,其中,所述风力发电机的传动系统具有涡轮机和发电机,并且所述涡轮机和所述发电机通过柔性轴连接,所述两质量为所述涡轮机和所述发电机的惯量,以及所述变速风力发电机传动系统的动力学方程为:
P
其中
其中ρ和R分别表示空气密度和涡轮机叶片半径,v为风速,C
优选地,上述变速风力发电机的命令滤波反步控制方法包括以下步骤:
第1步,进行坐标变换:
令z
其中Z
其中ε
令
根据动力学方程式(1),可以推导出状态变量z的动态方程式(3):
第2步,为了消除误差
其中l
定义补偿跟踪误差为:s
将式(3)和式(4)代入式(5)得到补偿跟踪误差的导数:
第3步,为了推导虚拟控制信号,定义二次函数
定义虚拟控制信号α
第4步,令
定义虚拟控制信号α
第5步,令
发电机的电磁转矩T
优选地,上述变速风力发电机的命令滤波反步功率信号反馈控制方法,使得在低速区域内工作的变速发电机的输出功率能够跟踪涡轮,从而从风中捕获的最大能量:
其中C
本发明另一方面提供了一种用于变速风力发电机的控制器,该控制器通过执行上述用于变速风力发电机的命令滤波反步控制方法来调节变速风力发电机的输出功率。
本发明再一方面提供了一种变速风力发电机,其包括上述控制器。
相对针对变速风力发电系统的现有的动态模型大部分考虑集中的单质量传动系统动力学,忽略了所有的扭转行为对发电机组动态响应的影响,并且,现有的风力发电机组通常利用传统的基于查表发的功率反馈控制方法或基于修正摄动观察方法的最优功率-速度曲线动态标定方法的功率反馈控制方法,但都是针对集中的单质量传动系统动力学设计的。为了解决这一问题,本发明针对变速风力发电机,考虑其两质量柔性轴模型,利用命令滤波反步控制方法设计功率反馈控制器,实现对系统最大功率点的跟踪。
附图说明
图1是变速风力发电机的结构图。
图2是图1的变速风力发电机的功率系数Cp分布图。
图3是传统5MW变速风力发电机命令滤波反步功率信号反馈控制系统仿真结构图。
图4a是随机风速信号下的变速风力发电机的响应曲线。
图4b是随机风速信号下的变速风力发电机的输出功率。
图4c是随机风速信号下的变速风力发电机的输入转矩。
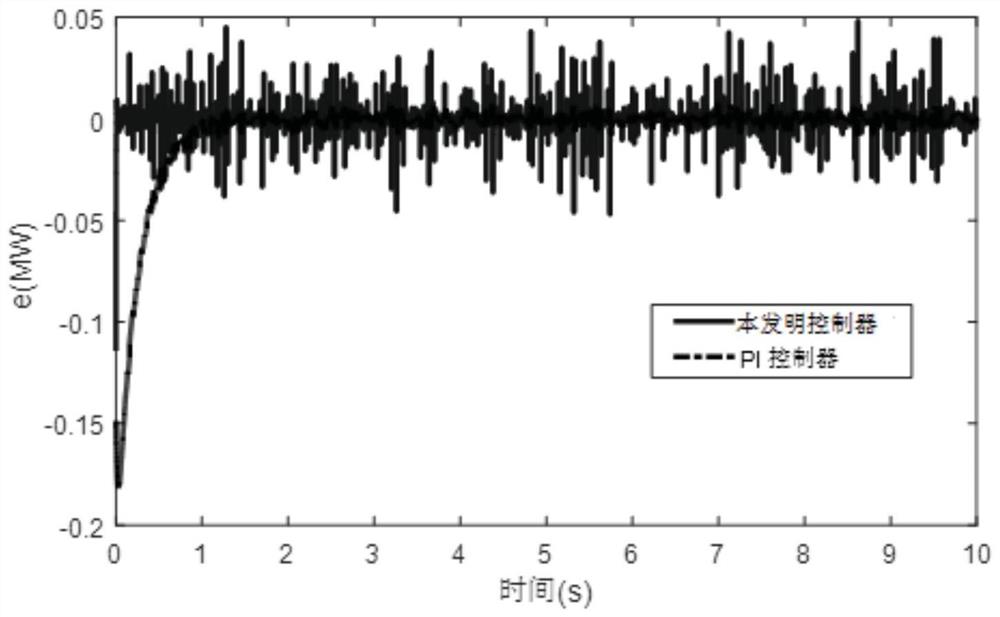
图4d是随机风速信号下的变速风力发电机的输出跟踪误差。
具体实施方式
本发明的描述中,“变速风力发电机”也称为“变速风力发电机组”。
本发明的描述中,“用于变速风力发电机的命令滤波反步控制方法”也称为“用于变速风力发电机的命令滤波反步功率信号反馈控制方法”。
参见图1至图4d所示,现在对本发明的具体实施方式进行如下详细描述:
本发明主要针对变速风力发电机,考虑其两质量柔性轴模型,提出了用于变速风力发电机的命令滤波反步控制方法。
图1为常见的变速风力发电机,其由一台直接驱动发电机和一台风力涡轮机组成。永磁同步发电机采用永磁代替普通发电机的励磁,具有结构简单可靠、励磁功率小、发电效率高等优点。为了提高效率和功率密度,以及降低系统的维护要求,采用了不带齿轮箱的高极数设计,使风力发电机以20-40r/min的速度旋转。然而,本发明并没有指定特定的发电机技术。考虑到涡轮机和发电机由柔性轴连接,且集总惯性分离,引入两质量模型来描述传动系统的动态特性。
图2为图1的变速风力发电机的风力机功率系数C
图3为传统5MW变速风力发电机命令滤波反步功率信号反馈控制系统仿真结构图。VSWT模块包括变速风力发电机的动力学模型,补偿信号发生器模块用于产生误差补偿信号,命令滤波器模块用于产生虚拟控制信号的一阶命令滤波信号,控制器模块用来产生虚拟控制输入和发电机电磁转矩信号,输入信号产生器模块用于产生给定的输入信号P
5MW变速风力发电机的动力学方程式为:
P
式中
式中,ρ和R分别表示空气密度和涡轮叶片半径,υ表示风速。C
本发明所涉及的控制问题是在低速区域实现风力发电机输出功率的最大化。在实际应用中,电网频率控制需要一个能量缓冲器来应对突然的消耗变化,因此涡轮以略低于最大功率的功率运行为好。因此,本文的控制目标是对发电机电磁转矩T
设计一种命令滤波反步功率信号反馈控制器来调节输出功率P
第一步:进行坐标变换:令
式中,ε
令
根据上述动力学方程式(1),可以推导出状态变量z的动态。
其中
第二步:为了消除误差
式中,l
定义补偿跟踪误差为
s
将(3)-(4)代入(5)得到
第三步:为了推导虚拟控制信号,定义二次函数
定义虚拟控制信号α
第四步:令
定义虚拟控制信号α
第五步:令
控制发电机的电磁转矩T
对一台5MW变速风力发电机的传动系统的动态特性进行了数值模拟,其数据如表1所示。利用本发明的用于变速风力发电机的命令滤波反步控制方法验证该传动系统的性能,验证过程中考虑了真实的风廓线下WECS的工作案例,模拟的环境参数为:ρ=1.225kg/m
为了验证本发明的用于变速风力发电机的命令滤波反步功率信号反馈控制方法在实际湍流条件下的性能,用Kaimal湍流模型计算了平均风速为7m/s左右随机变化的风廓线,结果如图4a所示。
利用上述用于变速风力发电机的命令滤波反步控制方法的控制器(下面称为“本发明控制器”)的参数设置为:滤波系数ε
图4b和图4c分别显示了本发明控制器和PI控制器控制下随机风速信号下的变速风力发电机的输出功率和输入转矩。PI控制器是一种线性控制器,根据给定值与输入值的偏差信号作为输入,将偏差信号的比例与积分的综合作为输出,作为VSWT系统的电磁转矩信号,下闭环VSWT系统的性能比较。PI控制器的比例分量和积分分量的系数分别为K
表1.变速风力发电机的传动系统的动态特性
以上所述的仅为本发明的较佳实施例,并非用以限定本发明的范围,本发明的上述实施例还可以做出各种变化。即凡是依据本发明申请的权利要求书及说明书内容所作的简单、等效变化与修饰,皆落入本发明专利的权利要求保护范围。本发明未详尽描述的均为常规技术内容。
- 用于变速风力发电机的命令滤波反步控制方法及控制器
- 一种柔性双关节机械臂命令滤波反步控制方法