移栽实验台及取苗苗盘输送定位方法及定位装置
文献发布时间:2023-06-19 11:34:14
技术领域
本发明涉及一种钵苗移栽装置,特别是一种移栽实验台及取苗苗盘输送定位方法及定位装置。
背景技术
穴盘苗移栽具有缩短生育期、提早成熟及提高经济作物单产等优点,随着移栽技术的广泛推广应用,人工移栽及半自动移栽机均已不能满足规模化生产需求,全自动移栽机的研发愈发迫切。
自动取苗装置是全自动移栽机的核心部件之一,准确定位苗盘位置,是完成自动取苗的关键。国内对于苗盘纵移的控制一般分为纯机械式及电控式。纯机械式采用棘轮或槽轮单向间歇运动机构,震动、噪声较大,同时具有累积误差;电控式一般采用首行定位,步进电机转动一定角度实现苗盘的纵移及各行定位,但会产生累积误差。
发明内容
本发明所要解决的技术问题是针对现有技术的上述问题,提供一种移栽实验台及其取苗苗盘输送逐行定位方法及定位装置。
为了实现上述目的,本发明提供了一种取苗苗盘输送定位装置,其中,包括:
固定架,所述固定架上设置有苗盘支撑板,用于放置装有钵苗的苗盘;
激光定位机构,安装在所述固定架前端一侧,并对应于所述苗盘设置,所述激光定位机构的光束与所述苗盘的侧面垂直,所述激光定位机构实时测量所述苗盘位置并将测量数据传送给一控制器;
驱动机构,安装在所述固定架上并与所述控制器连接;
传动机构,包括主动轴、从动轴和平行链,所述平行链张紧在所述主动轴和从动轴上,所述主动轴与所述驱动机构连接;以及
苗盘挂杆,两端分别与所述平行链连接,并随所述平行链一起移动,所述苗盘挂杆推动所述苗盘沿所述苗盘支撑板纵向前移;
其中,所述测量数据大于设定阈值时,判定所述苗盘未到位,所述驱动机构继续驱动所述苗盘挂杆推动所述苗盘纵向前移;所述测量数据小于所述设定阈值时,判定所述苗盘到位,所述控制器控制所述驱动机构停止运动。
上述的取苗苗盘输送定位装置,其中,所述固定架上还设置有限位杆,所述限位杆沿所述苗盘支撑板纵向设置,用于限定所述苗盘的左右位置。
上述的取苗苗盘输送定位装置,其中,所述固定架上还包括压盘板,用于将所述苗盘压平在所述苗盘支撑板上。
上述的取苗苗盘输送定位装置,其中,所述激光定位机构包括:
固定支座,一端设置有连接孔,所述固定支座通过所述连接孔安装在所述固定架的一侧;以及
激光传感器,通过连接板安装在所述固定支座上;
其中,所述固定支座上设置有长条孔,所述长条孔沿所述苗盘纵向输送的方向延伸,所述连接板在所述长条孔中移动以调节所述激光传感器的安装位置,以使所述苗盘输送到位时,所述苗盘的穴钵底孔与设置在所述固定架下方的顶苗杆对心。
上述的取苗苗盘输送定位装置,其中,所述驱动机构包括:
步进电机,通过电机固定座安装在所述固定架的一侧;以及
牙嵌式离合器,设置在所述步进电机与所述主动轴之间;所述牙嵌式离合器包括电机牙嵌、爪形离合套和压缩弹簧,所述电机牙嵌与所述步进电机连接,所述爪形离合套在所述压缩弹簧的作用下与所述电机牙嵌始终保持啮合。
上述的取苗苗盘输送定位装置,其中,所述驱动机构还包括制动结构,用于发生故障时分离所述牙嵌式离合器,所述爪形离合套与所述制动结构连接,所述制动结构包括对应于所述牙嵌式离合器设置在所述电机固定座上的销轴、挡销、挡板和拉手,所述拉手安装在所述销轴上并带动所述销轴转动,所述挡销安装在所述拉手上并抵靠在所述挡板上。
为了更好地实现上述目的,本发明还提供了一种取苗苗盘输送定位方法,其中,采用上述的取苗苗盘输送定位装置,包括如下步骤:
S100、将装有钵苗的苗盘放置在固定架上;
S200、采用激光定位机构实时测量所述苗盘位置并将测量数据传送给一控制器;
S300、所述控制器控制驱动机构带动所述苗盘沿所述固定架纵向前移;
S400、比较所述测量数据与一设定阈值;
S500、所述测量数据大于设定阈值时,判定所述苗盘未到位,所述驱动机构继续带动所述苗盘纵向前移;以及
S600、所述测量数据小于所述设定阈值时,判定所述苗盘到位,所述控制器控制所述驱动机构停止运动。
上述的取苗苗盘输送定位方法,其中,在步骤S200之前,还包括:
S110、调节所述激光传感器的安装位置,以使所述苗盘输送到位时,所述苗盘的穴钵底孔与设置在所述固定架下方的顶苗杆对心。
上述的取苗苗盘输送定位方法,其中,所述设定阈值的阈值范围为100~600mm。
为了更好地实现上述目的,本发明还提供了一种移栽实验台,包括机架及安装在所述机架上的取苗机构、导苗筒、鸭嘴栽植器和取苗苗盘输送定位装置,所述取苗机构对应于所述取苗苗盘输送定位装置设置,所述导苗筒位于所述取苗机构和所述鸭嘴栽植器之间,其中,所述取苗苗盘输送定位装置为上述的取苗苗盘输送定位装置。
本发明的技术效果在于:
本发明在每一排苗盘输送时,都重新定位,即使有定位误差,每一次之间也不会相互影响,从而避免了累计误差。同时,激光传感器测量速度快、精度高,所以该定位方法定位准确、快速。
以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
附图说明
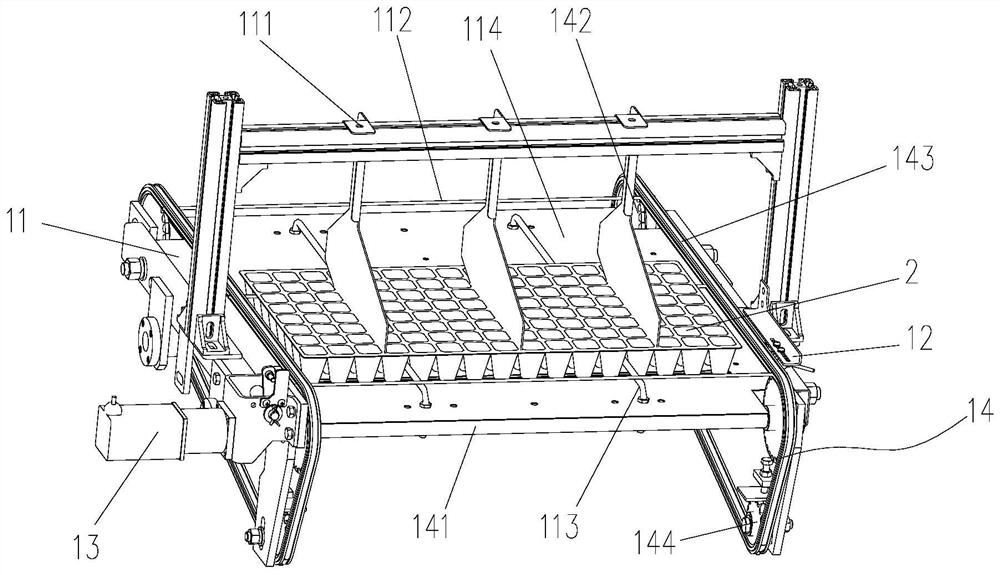
图1为本发明一实施例的取苗苗盘输送定位装置结构示意图;
图2为本发明一实施例的苗盘示意图;
图3为图2的侧视图;
图4为本发明一实施例的取苗苗盘输送定位原理图;
图5为本发明一实施例的激光定位机构结构示意图;
图6为本发明一实施例的驱动机构结构示意图;
图7为本发明一实施例的取苗苗盘输送定位方法示意图;图8为本发明一实施例的移栽实验台结构示意图。
其中,附图标记
1 取苗苗盘输送定位装置
11 固定架
111 压盘板
112 苗盘挂杆
113 限位杆
114 苗盘支撑板
12 激光定位机构
121 激光传感器
122 连接板
123 长条孔
124 螺钉
125 固定支座
126 连接孔
127 光束
13 驱动机构
131 步进电机
132 电机固定座
133 电机牙嵌
134 爪形离合套
135 压缩弹簧
136 制动结构
1361 挡板
1362 销轴
1363 拉手
1364 挡销
14 传动机构
141 主动轴
142 从动轴
143 平行链
144 张紧轮
2 苗盘
21 穴钵
22 底孔
3 取苗机构
4 导苗筒
5 机架
6 栽植器驱动电机
7 鸭嘴栽植器
8 控制器
9 顶苗杆
具体实施方式
下面结合附图对本发明的结构原理和工作原理作具体的描述:
参见图1,图1为本发明一实施例的取苗苗盘输送定位装置1结构示意图。本发明的取苗苗盘输送定位装置1,包括:固定架11,所述固定架11上设置有苗盘支撑板114,用于放置装有钵苗的苗盘2;激光定位机构12,安装在所述固定架11前端一侧,并对应于所述苗盘2设置,所述激光定位机构12的光束127与所述苗盘2的穴盘侧面垂直,所述激光定位机构12实时测量所述苗盘2位置并将测量数据传送给一控制器8;驱动机构13,安装在所述固定架11上并与所述控制器8连接;传动机构14,包括主动轴141、从动轴142和平行链143,所述平行链143张紧在所述主动轴141和从动轴142上,所述主动轴141与所述驱动机构13连接,还可在传递机构14上设置张紧轮144,以进一步张紧该平行链143;以及苗盘挂杆112,两端分别与所述平行链143连接,并随所述平行链143一起移动,所述苗盘挂杆112推动所述苗盘2沿所述苗盘支撑板114纵向前移;其中,所述测量数据大于设定阈值时,判定所述苗盘2未到位,所述驱动机构13继续驱动所述苗盘挂杆112推动所述苗盘2纵向前移;所述测量数据小于所述设定阈值时,判定所述苗盘2到位,所述控制器8控制所述驱动机构13停止运动。所述设定阈值的阈值范围优选为100~600mm。
本实施例中,所述固定架11上还设置有限位杆113,所述限位杆113沿所述苗盘支撑板114纵向设置,用于限定所述苗盘2的左右位置。所述固定架11上还可包括压盘板111,用于将所述苗盘2压平在所述苗盘支撑板114上。
参见图2及图3,图2为本发明一实施例的苗盘示意图,图3为图2的侧视图。工作时,步进电机131驱动主动轴141转动,主动轴141两端分别安装一个主链轮,主链轮参数相同,从动轴142两端也分别安装一个参数相同的从链轮。苗盘2置于苗盘挂杆112前方,在电机驱动下,随着平行链143一起移动进行纵向输送。激光定位机构12安装在固定架11上,光束127与苗盘2的侧面垂直。从图3的侧视图可以看出,苗盘2的穴钵21之间都有较大间隙且贯通这个苗盘2。
参见图4,图4为本发明一实施例的取苗苗盘输送定位原理图。当控制器8接收信号需要进行纵向移盘时,控制器8先驱动步进电机131进行转动,使苗盘2下移,控制器8此时通过激光传感器121实时反馈的距离,判断苗盘2是否到位。苗盘2的穴钵21的边沿若到达光束127处时,反馈的距离较小,若是苗盘2的穴钵21的间隙到达光束127处时,则反馈的距离较大。设置适中的阈值,当测得的距离小于该设定阈值时,则为输送到位。具体说,开始输送后,激光传感器121实时测量并将数据传送给控制器8,在光束127扫到苗盘2第一排之前,光束127扫到机架5上,会测得一个较大数值,大于设定阈值,控制器8判定苗盘2未到位。随着不断向下输送,当光束127扫到苗盘2第一排的穴钵21边沿时,激光传感器121测得的数值急剧变小,小于设定阈值,控制器8判定苗盘2到位,发送停止指令给步进电机131,从而苗盘2停止移动,停止后苗盘2的穴钵21底孔22与顶苗装置在纵向方向上对中。根据苗盘2尺寸以及取苗苗盘输送定位装置1的安装位置,设定阈值的范围优选为100~600mm,最佳为350mm。当苗盘2第一排取完苗后,控制器8发出电机运转指令。随后,苗盘2的第一排穴钵21、第一排与第二排之间的间隙会依次通过激光光束127,当激光光束127扫到第二排穴钵21边沿时,控制器8判定苗盘2到位,发出电机停止指令。依此原理,循环间歇输送苗盘2直至全部钵苗取苗结束。该定位方法,在每一排苗盘2输送时,都重新定位,即使有定位误差,每一次之间也不会相互影响,从而避免了累计误差。同时,激光传感器121测量速度快、精度高,所以该定位方法定位准确、快速。
参见图5,图5为本发明一实施例的激光定位机构结构示意图。本实施例的所述激光定位机构12包括:固定支座125,一端设置有连接孔126,所述固定支座125通过所述连接孔126安装在所述固定架11的一侧;激光传感器121,通过连接板122安装在所述固定支座125上;其中,所述固定支座125上设置有长条孔123,所述长条孔123沿所述苗盘2纵向输送的方向延伸,所述连接板122在所述长条孔123中移动以调节所述激光传感器121的安装位置,以使所述苗盘2输送到位时,所述苗盘2的穴钵21底孔22与设置在所述固定架11下方的顶苗杆9对心。激光传感器121可通过螺钉124安装在连接板122上,连接板122通过螺钉124固定在固定支座125上,固定支座125安装后,长条孔123的方向与苗盘2纵向输送的方向一致。更换使用不同规格苗盘2时以及顶苗装置与苗盘2的穴钵21底孔22不对心时,可调节激光传感器121在长条孔123中的安装位置,从而使苗盘2输送到位停下后,苗盘2的穴钵21底孔22与顶苗装置对心。顶苗装置主要包括顶苗杆9,顶苗杆9为圆柱状,苗盘2到位后,顶苗装置向上运动,顶苗杆9通过穴钵21底孔22进入苗盘2,此时穴钵21底孔22的圆孔与顶苗杆9的圆柱,若二者的圆心重合即为对心。
参见图6,图6为本发明一实施例的驱动机构结构示意图。本实施例的所述驱动机构13包括:步进电机131,通过电机固定座132安装在所述固定架11的一侧;以及牙嵌式离合器,设置在所述步进电机131与所述主动轴141之间;所述牙嵌式离合器包括电机牙嵌133、爪形离合套134和压缩弹簧135,所述电机牙嵌133与所述步进电机131连接,所述爪形离合套134在所述压缩弹簧135的作用下与所述电机牙嵌133始终保持啮合。所述驱动机构13还包括制动结构136,用于发生故障时分离所述牙嵌式离合器,所述爪形离合套134与所述制动结构136连接,具体可与拉手1363的下端连接,拉手1363绕销轴1362转动时可以推离该爪形离合套134,所述制动结构136包括对应于所述牙嵌式离合器设置在所述电机固定座132上的销轴1362、挡销1364、挡板1361和拉手1363,所述拉手1363安装在所述销轴1362上并带动所述销轴1362转动,所述挡销1364安装在所述拉手1363上并抵靠在所述挡板1361上。正常工作时,取下挡销1364,爪形离合套134在压缩弹簧135的作用下与电机牙嵌133始终保持啮合;当装置发生故障时,可转动拉手1363克服压缩弹簧135的弹力推离爪形离合套134,并插上挡销1364,使牙嵌式离合器的电机牙嵌133与爪形离合套134分离,此时可手动转动平行链143退出苗盘2,方便操作。
参见图7,图7为本发明一实施例的取苗苗盘2输送定位方法示意图。本发明的取苗苗盘2输送定位方法,可应用于上述的取苗苗盘输送定位装置1,包括如下步骤:
步骤S100、将装有钵苗的苗盘2放置在固定架11上;
步骤S200、采用激光定位机构12实时测量所述苗盘2位置并将测量数据传送给一控制器8;
步骤S300、所述控制器8控制驱动机构13带动所述苗盘2沿所述固定架11纵向前移;
步骤S400、比较所述测量数据与一设定阈值;
步骤S500、所述测量数据大于所述设定阈值时,判定所述苗盘2未到位,所述驱动机构13继续带动所述苗盘2纵向前移;以及
步骤S600、所述测量数据小于所述设定阈值时,判定所述苗盘2到位,所述控制器8控制所述驱动机构13停止运动。
其中,在步骤S200之前,还包括:
步骤S110、调节所述激光传感器121的安装位置,以使所述苗盘2输送到位时,所述苗盘2的穴钵21底孔22与设置在所述固定架11下方的顶苗杆9对心。
参见图8,图8为本发明一实施例的移栽实验台结构示意图。本发明的取苗苗盘输送定位装置1和定位方法可应用于自动移栽机或移栽实验台等,本实施例中提供一种应用该取苗苗盘输送定位装置1和定位方法的移栽实验台,包括机架5及安装在所述机架5上的取苗机构3、导苗筒4、鸭嘴栽植器7和取苗苗盘输送定位装置1,所述取苗机构3对应于所述取苗苗盘输送定位装置1设置,所述导苗筒4位于所述取苗机构3和所述鸭嘴栽植器7之间。取苗苗盘输送定位装置1可以将苗盘2输送到位,顶苗杆9将钵苗从苗盘2中顶出。随后取苗机构3在气缸的驱动下,向上摆动到与苗盘2面垂直位置,然后取苗机构3中的取苗机械手进行取苗,随后取苗机构3摆动到竖直位置,松开取苗机械手,钵苗落入导苗筒4中。随着导苗筒4一起转动,到达鸭嘴栽植器7上方,随后落入鸭嘴栽植器7中。然后,鸭嘴栽植器7在栽植器驱动电机6的带动下将钵苗栽植入土。栽植器驱动电机6可作为鸭嘴栽植器7与导苗筒4的动力驱动,鸭嘴栽植器7与导苗筒4通过齿轮箱连接,使每个鸭嘴栽植器7到达最高点时,正好导苗筒4在其上方,完成落苗。
当然,本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
- 移栽实验台及取苗苗盘输送定位方法及定位装置
- 移栽实验台及取苗苗盘输送定位装置