基于统一算法数据机器学习线性回归的气动参数快速确定方法
文献发布时间:2023-06-19 11:35:49
技术领域
本发明涉及飞行器空气动力技术领域,特别是涉及一种基于统一算法数据及线性回归的气动参数快速算法。
背景技术
在过去计算机条件不够先进、流体力学计算技术还未充分发展的情况下,空气动力学科研人员只能根据不同流域典型流动状态特点分区独立计算,如利用克努森数将大气流动划分为连续流区、滑移流区、稀薄过渡流区、自由分子流区等四大流动区域,再利用Euler和N-S方程解决连续流区问题,利用带滑移边界条件的N-S方程算法(Slip-N-S)解决滑移流区流动问题,利用搭桥方法和耦合方法解决稀薄过渡流区,利用DSMC方法解决自由分子流区到稀薄过渡流区的流动问题。但是这样的解决方案仍然有以下缺陷:
一是各个流动区域之间并没有严格的界限,在各区交界附近的气动状态缺乏统一可靠的理论支撑依据;二是同一个流场可能存在多个流动区域,例如在高空喷流问题中,同一流场就同时存在连续流区和稀薄流区两个流动分区;三是稀薄过渡流区在模拟方法和测试技术方面都不十分完备,在理论上同样缺乏系统研究,搭桥方法和耦合方法虽然具有使用价值,但搭桥方法连接不光滑,耦合方法计算范围较窄,计算结果依赖经验判断,不能实现一体化模拟。
《基于Boltzmann模型方程的气体运动论统一算法研究》等文献提出了一种基于Boltzmann模型方程的跨流域统一算法。此算法利用离散、降维等方法,去掉分布函数对速度空间的连续依赖性,拆解了计算任务,分散了数据存储,让求解Boltzmann模型方程的过程更加适合并行计算机运行机理,从而解决了飞行器跨流域再入等复杂气动一体化模拟问题。
然而,由于统一算法计算量大,资源消耗多,无法在短时间内用少量计算资源得到全流域气动数据结果,文献《天宫飞行器低轨控空气动力特性一体化建模与计算研究》提出了一种基于自由分子流与连续流当地化桥函数理论关联的桥公式法,该方法根据飞行器外形及绕流特点调试确定关联参数,以统一算法部分代表性气动数据结果为参考,得到从自由分子流与连续流全流域气动数据结果,采用统一算法(GKUA)计算全飞行流域落球绕流阻力系数收敛一致性验证比较如图2所示。
上述方法虽然达到了在短时间内用较小资源获取全流域气动数据结果的目的,但是桥公式法关联参数需人为手动调节,凭目测校准,不一定能够得到最佳拟合结果,且对操作人员经验水平要求较高。
发明内容
本发明的一个目的是解决至少上述问题和/或缺陷,并提供至少后面将说明的优点。
为了实现根据本发明的这些目的和其它优点,提供了一种基于统一算法数据及线性回归的气动参数快速确定方法,包括:
步骤一,基于Boltzmann模型方程的气体动理论统一算法,以获得部分代表性气动数据结果;
步骤二,基于部分代表性气动数据结果,通过线性回归的方式扩展为全流域连续的气动数据曲线;
步骤三,根据全流域连续的气动参数曲线,得到所需高度的气动状态结果参数。
优选的是,在步骤一中,采用统一算法计算部分代表性气动数据的方法被配置为包括:
S10、输入来流的克努森数、普朗特数、马赫数、压力、温度、攻角、侧滑角、飞行高度,以及气动外形网格;
S11、引入当地平衡态分布函数f
C
其中,f为依赖位置空间r、分子速度V和时间t的气体分子速度分布函数,f
S12、将迭代计算得到的气体分子速度分布函数f代入如下方程以得到相关的宏观流动物理量:
n(r,t)=∫fdV;
nU′(r,t)=∫V
P=nT;
τ
q
其中,气体密度n、流动速度U、温度T、气体压力P、粘性应力τ、热流矢量q;
S13、通过S12得到的宏观流动物理量,进而得到气动阻力系数(Cd)工程项目所需参数;
S14、通过调节来流的克努森数、普朗特数、马赫数、压力、温度、攻角、侧滑角、飞行高度相关输入数据,并重复S10到S13进而得到其中一个气动外形的部分代表性气动数据。
优选的是,在步骤二中,全流域连续的气动数据曲线获取方式被配置为采用最小二乘法,包括:
S20、设(x,y)是一对观测量,且x=[x
y=f(x,ω);
其中,ω=[ω
S21、求解目标函数:
其中,x可替换为高度,y可替换为气动阻力系数相关工程项目所需的气动参数,而函数曲线y=f(x,ω)代表全流域目标气动参数曲线。
优选的是,在步骤三中,将工程项目所需要的全流域中相关的气动状态数据代入全流域目标气动数据曲线,进而得到对应的气动状态
本发明至少包括以下有益效果:其一,本发明相比较过去不同流域使用不同计算方法,本专利方法以统一算法运算结果为数据依托,可以使用一种方法计算全流域气动特性,避免了各流域方法交界处尤其是稀薄过渡流区结果不统一的情况,结果可靠性高。
其二,本发明相比较基于自由分子流与连续流当地桥函数理论关联的桥公式法等传统方法,本专利方法不需要手动调节桥函数参数,自动化程度高。
其三,本发明根据统一算法部分代表性气动数据结果,借助机器学习线性回归技术进行分析,将部分的离散的气动数据结果,扩展为连续的气动数据曲线,从而得到全流域气动数据结果,从而能够以较小时间成本和计算资源,得到全流域气动数据结果。
本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
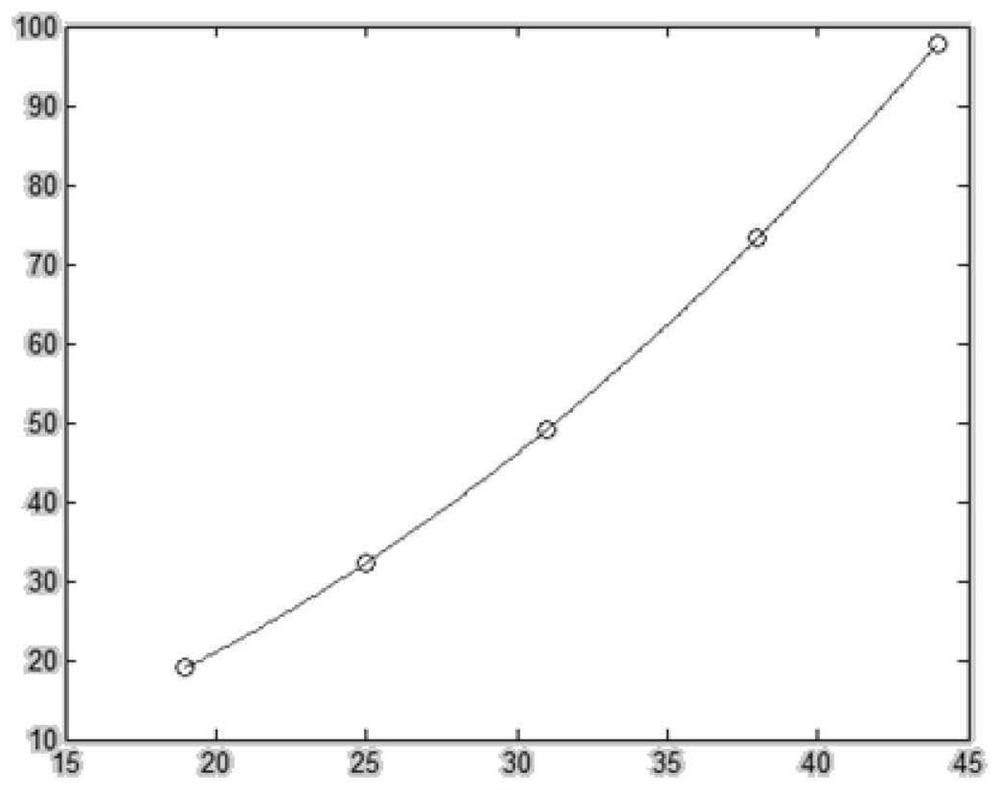
图1为本发明的一个实施例中采用最小二乘法拟合的曲线效果图;
图2为现有技术中采用统一算法(GKUA)计算全飞行流域落球绕流阻力系数收敛一致性验证比较图。
具体实施方式
下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
应当理解,本文所使用的诸如“具有”、“包含”以及“包括”术语并不配出一个或多个其它元件或其组合的存在或添加。
需要说明的是,在本发明的描述中,术语指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,并不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“套设/接”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接,可以是机械连接,也可以是电连接,可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通,对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
本发明的技术方案配置为包括以下步骤:
1.基于Boltzmann模型方程的气体动理论统一算法获得部分代表性气动数据结果
根据《基于Boltzmann模型方程的气体运动论统一算法研究》等文献,此处简要引用统一算法计算流程如下:
首先输入来流的克努森数、普朗特数、马赫数、压力、温度、攻角、侧滑角、飞行高度,以及气动外形网格等数据。
其次引入当地平衡态速度分布函数f
C
其中,f为依赖位置空间r、分子速度空间V和时间t的气体分子速度分布函数,f
再次,将迭代计算得到的气体分子速度分布函数f代入如下方程可得到宏观流动物理量,如气体密度n、流动速度U、温度T、气体压力P、粘性应力τ、热流矢量q等:
n(r,t)=∫fdV (2.7)
nU′(r,t)=∫V
P=nT (2.10)
τ
q
最终,由上述宏观流动物理量可进而得到气动阻力系数(Cd)等工程项目所需参数。
通过调节来流的克努森数、普朗特数、马赫数、压力、温度、攻角、侧滑角、飞行高度等输入数据,并重复上述步骤,就可以得到某一气动外形部分代表性气动数据结果。
2.基于部分代表性气动数据结果机器学习扩展为全流域连续的气动数据线性回归计算技术
现有的机器学习提供了多种线性回归算法,其中较有代表性的是最小二乘法,求解该问题的方法的几何语言称为最小二乘拟合。此方法为较为成熟的数学方法,其简要过程如下:
设(x,y)是一对观测量,且x=[x
y=f(x,ω)
其中ω=[ω
上述过程实际上是在计算函数y=f(x,ω)得到的预测结果与真实结果y的最小方差,当方差最小时,预测结果最佳,此时的ω=[ω
图1中的圆点代表观测量(x,y),曲线即为所求拟合曲线y=f(x,ω),在本步骤中,x可替换为高度,y可替换为气动阻力系数(Cd)等工程项目所需气动参数,函数曲线y=f(x,ω)代表全流域目标气动参数曲线(如阻力系数气动参数曲线)。
3.根据全流域连续的气动参数曲线,得到所需高度的气动状态结果参数
在实际使用中,工程项目往往需要全流域中某些高度的气动状态数据,因此可以将所需高度代入上述气动数据曲线,得到所需高度的气动状态。
专利提出一种基于统一算法数据的机器学习工程算法用以替代上述办法。具体思路为:依托统一算法部分代表性气动数据结果,通过机器学习线性回归技术进行分析,将部分的离散的气动数据结果,扩展为连续的气动数据曲线,从而得到全流域气动数据结果。而表1展示的是硬质球体在110~30km高度,跨流域圆球绕流试验统一算法与专利方法气动阻力系数(Cd)结果比较。需要指出的是:克努森数(Kn)、高度(H)、雷诺数(Re)、马赫数(Ma)为输入参数,且30km、50km、70km、90km、100km、110km高度下的阻力系数为已知量,用于机器学习线性回归方法的输入数据,其余高度的阻力系数为专利方法结果,用于进行对比。
表1跨流域圆球绕流试验统一算法与专利方法气动阻力系数(Cd)结果比较
由上表可以看出,统一算法与专利方法结果基本保持一致,证实了专利算法的正确可靠性。这里值得指出的是,在这里专利方法虽然只给出了40km、60km、65km、74km、80km、95km、105km这7个结果,实际上如果实际需要,本专利方法可根据统一算法上述数据,在数秒时间内用个人计算机给出30km~110km任一高度的阻力系数,且完全由计算机自动完成,不需要人工干预。
上述结果说明,本专利方法计算精度满足工程使用要求,在自动化方面不需要人工干预,相比较传统桥公式法,更加省力高效。
以上方案只是一种较佳实例的说明,但并不局限于此。在实施本发明时,可以根据使用者需求进行适当的替换和/或修改。
这里说明的设备数量和处理规模是用来简化本发明的说明的。对本发明的应用、修改和变化对本领域的技术人员来说是显而易见的。
尽管本发明实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用。它完全可以被适用于各种适合本发明的领域。对于熟悉本领域的人员而言,可容易地实现另外的修改。因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
- 基于统一算法数据机器学习线性回归的气动参数快速确定方法
- 一种基于安全两方计算线性回归算法的数据隐私保护系统