一种无链式多级变速机构
文献发布时间:2023-06-19 11:37:30
技术领域
本发明涉及多级变速技术领域,尤其涉及一种无链式多级变速机构。
背景技术
目前市场多为传统自行车,该种自行车使用方便,但也有一定的问题。(1)由链条传递动力,极易造成脱链、掉链、卡链、噪音大的问题。(2)变速级数单一,无法满足使用者不同场合的使用需求。(3)使用过程中链条易磨损、易伸长、易出现多边形效应,使传动不平稳。
为解决在骑行过程中脱链、掉链等的问题,目前市场有一种无链条、直接传动的自行车,其轮轴驱动的传动比数为1:1;即车轮速度等于脚踏速度,变速级数单一,骑行环境受到限制,无法满足人们的日常生活需求。
发明内容
本发明的目的在于提供一种无链式多级变速自行车,旨在解决自行车使用过程中脱链、掉链、效率低、使用环境受限制的问题。该装置与传统自行车相比,具有多级变速、传动效率高、无掉链困扰等优点。
为了实现上述目的,本发明采用了如下技术方案:
一种无链式多级变速机构,其特征在于:包括动力输入部分和动力输出部分,动力输入部分和动力输出部分之间通过传动套筒传递动力;
动力输入部分包括D区齿轮组和C区齿轮组,D区齿轮组和C区齿轮组由带轴键的脚踏转轴固定连接,脚踏转轴的轴键上设有滑移齿轮C,D区齿轮组和C区齿轮组分别位于滑移齿轮C两侧;
D区齿轮组包括锥齿轮A、齿圈D,太阳轮D、行星架D、行星轮D,太阳轮D固定于脚踏转轴,齿圈D与太阳轮D之间设有三个行星轮D,行星轮D分别与齿圈D和太阳轮D啮合,行星架D位于齿圈D侧部,行星架D与三个行星轮D固定连接;锥齿轮A内侧具有一圈棘齿,齿圈D上还设有带动齿圈D同向转动的棘爪D;
C区齿轮组包括锥齿轮C、齿圈C、太阳轮C、行星架C、行星轮C,太阳轮C固定于脚踏转轴,齿圈C与太阳轮C之间设有三个行星轮C,行星轮C分别与齿圈C和太阳轮C啮合,行星架C位于齿圈C侧部,行星架C与三个行星轮C固定连接;锥齿轮C内侧具有一圈棘齿,齿圈C上还设有带动齿圈C同向转动的棘爪C;
传动套筒的一端具有锥齿轮B,另一端具有锥齿轮E,锥齿轮B分别与锥齿轮A和锥齿轮C啮合;
动力输出部分包括A区齿轮组和B区齿轮组,A区齿轮组和B区齿轮组由后轮轴固定连接;
A区齿轮组包括齿圈A、太阳轮A、行星轮A、行星架A,太阳轮A与后轮轴固定,太阳轮A与齿圈A之间设有三个行星轮A,行星轮A分别与太阳轮A与齿圈A啮合,行星架A位于齿圈A侧部,行星架A与三个行星轮A固定连接;
B区齿轮组包括行星架B、太阳轮B、行星轮B、齿圈B,太阳轮B位于齿圈B内侧,行星架B位于齿圈B外侧,太阳轮B固定于后轮轴上,太阳轮B的外侧为固定的同心齿轮,内侧固定设有同圆心的太阳轮固定轮,三个行星轮B位于齿圈B内且围绕于同心齿轮,三个行星轮B的圆心所在的圆与太阳轮B同圆心,行星轮B分别与齿圈B和同心齿轮啮合,三个行星轮B均固定于行星架B,行星架B圆周上具有齿轮;太阳轮固定轮与行星架A之间的后轮轴上固定设有同轴轮,同轴轮圆周上具有齿轮;
动力输出部分朝向动力输入部分的一侧设有固定的滑移齿轮轴A和固定轴一,滑移齿轮轴A上安装有滑移齿轮组A,滑移齿轮组A可沿滑移齿轮轴A轴向移动,可与太阳轮B、同轴轮、行星架A啮合和脱离;
固定轴一上设有锥齿轮D,锥齿轮D侧部具有锥齿,外圆一周具有齿轮,锥齿轮D的锥齿与锥齿轮E啮合,锥齿轮D的齿轮与行星架B啮合;
动力输出部分背离动力输入部分的一侧依次设有固定轴二、固定轴三、滑移齿轮轴B,固定轴二上依次设有惰轮D、惰轮E、惰轮F,固定轴三上依次设有惰轮A、惰轮B、惰轮C,滑移齿轮轴B上具有滑移齿轮组B,惰轮A与惰轮D啮合,惰轮B与惰轮E啮合,惰轮C与惰轮F啮合,滑移齿轮轴B上安装有滑移齿轮组B,滑移齿轮组B可沿滑移齿轮轴B轴向移动,可与惰轮A、惰轮B、惰轮C、齿圈B、行星架B啮合和脱离;
动力输出部分上部设有固定臂,固定臂依次设有可伸缩的锁定块A、锁定块B、锁定块C,锁定块A可锁定或脱离齿圈A、锁定块B可锁定或脱离太阳轮B,锁定块C可锁定或脱离齿圈B。
作为更进一步的优选方案滑移齿轮组A包括依次设置的齿轮一、齿轮二、齿轮三,其中,齿轮一与行星架A啮合,齿轮二与同轴轮啮合,齿轮三与太阳轮B啮合。
作为更进一步的优选方案滑移齿轮组B包括依次设置的齿轮四、齿轮五、齿轮六、齿轮七、齿轮八,其中,齿轮四与惰轮A啮合,齿轮五与惰轮B啮合,齿轮六与惰轮C啮合,齿轮七与齿圈B啮合,齿轮八与行星架B啮合。
作为更进一步的优选方案,还包括控制套筒、拨叉A、拨叉B、拨叉C、锁定块A、锁定块B、锁定块C以及拉绳,控制套筒通过拉绳控制拨叉A在滑移齿轮轴A上移动带动滑移齿轮组A切换齿轮啮合档位,控制套筒通过拉绳控制拨叉B在滑移齿轮轴B上移动带动滑移齿轮组B切换齿轮啮合档位,控制套筒通过拉绳控制拨叉C在脚踏转轴上移动带动滑移齿轮C切换齿轮啮合档位,控制套筒通过拉绳分别控制锁定块A锁死齿圈A,控制锁定块B锁死太阳轮B,控制锁定块C锁死齿圈B。
作为更进一步的优选方案所述控制套筒安装于车架上,控制套筒分为控制套筒A、控制套筒B,控制套筒A控制锁定块A、锁定块B、锁定块C的锁定或松开,控制套筒B控制滑移齿轮组A、滑移齿轮组B、滑移齿轮C分别处于不同的啮合状态。
本发明的一种无链式多级变速机构,具有多级变速机构,可适应不同使用场合,更加节省动力。采用直接传动的方式,避免了脱链、掉链、卡链的问题,并且传动效率更高。采用渐开线齿轮,寿命更长,保证润滑基本无需维护。传动机构间隙更小,传递过程中减少动力损耗。传动过程中更佳安静、干净、舒适,提高了使用效果。
附图说明
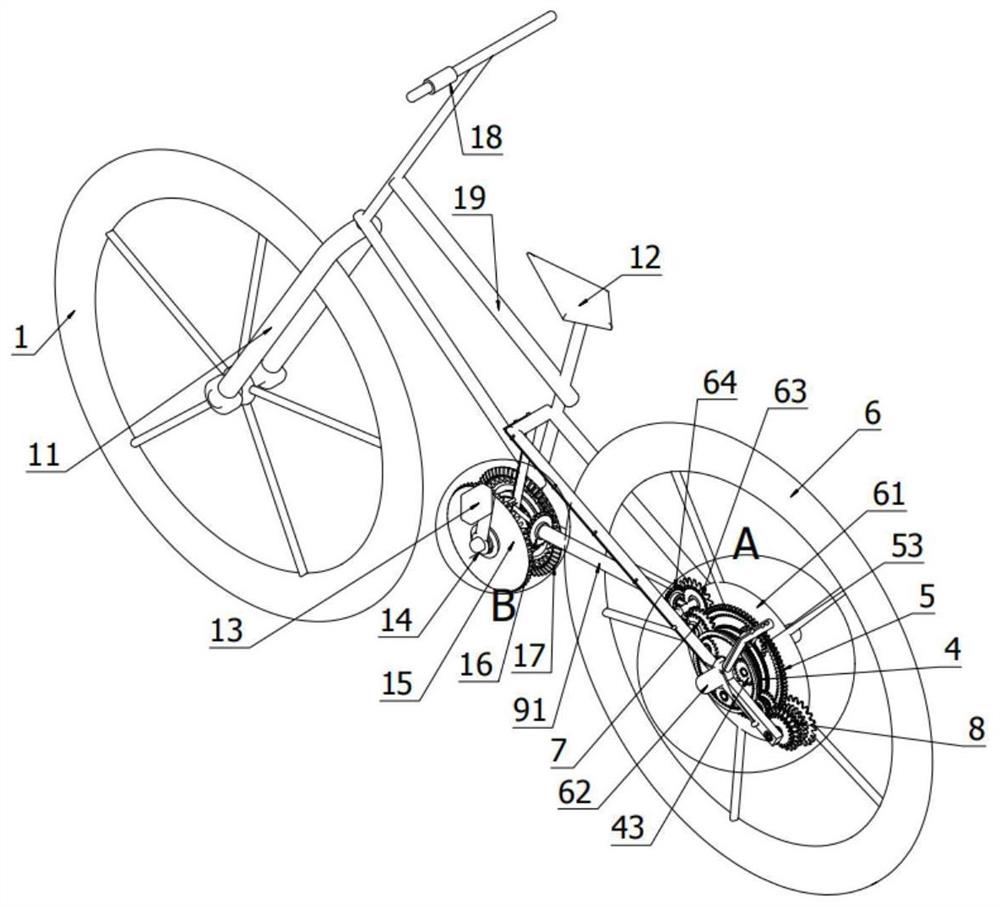
图1为本发明结构示意图;
图2为图1中A的局部放大图;
图3为图1中B的局部放大图;
图4为图1去掉前轮车架、后轮车架、车架的结构示意图;
图5为图4中C的局部放大图;
图6为图4右侧去掉后轮车架等后的结构示意图;
图7为图6去掉齿圈A、太阳轮A、行星架A等后的结构示意图;
图8为图7中去掉同轴轮、齿圈B等的结构示意图;
图9为图4左侧的结构示意图;
图10为图9去掉锥齿轮A、齿圈D、行星架D、太阳轮D、弹簧D等后的结构示意图;
图11为图10去掉齿圈D、轴承等后的结构示意图;
图12为图9外侧部分的结构示意图;
图13为前轮、后轮、前轮车架、后轮车架、车架的装配图;
图14为后侧传动部分的原理图;
图15为滑移齿轮组A单独作用时,滑移齿轮组B啮合原理图;
图16为滑移齿轮组B单独作用时,滑移齿轮组A啮合原理图;
图17为行星轮组的区域编号说明图;
图18为力传动的方向图;
图19为滑移齿轮组A、拨叉A、弹簧A的装配图;
图20为控制套筒的具体结构示意图;
图21为锁定块部分的结构示意图;
图22为图21为去掉锁定块滚筒后的结构示意图;
图23为各个锁定块滚筒的结构示意图;
图24为滑移齿轮组A、拨叉A等组件的结构示意图和滚筒A的结构示意图;
图25为凸轮截面图;
图26为图24去掉滚筒A的结构示意图;
图27为滑移齿轮组B及其组件的结构示意图和滚筒B的结构示意图;
图28为图27去掉滚筒B的结构示意图;
图29为滑移齿轮C及拨叉C的结构示意图;
图30为滑移齿轮C及拨叉C的俯视图;
图31为图30中去掉滚筒C的结构示意图;
图中:1、前轮 11、前轮车架 12、坐垫 13、脚踏 14、脚踏转轴 15、锥齿轮A 151、轴承E 16、锥齿轮B 161、轴承I 17、锥齿轮C 18、控制套筒 19、车架 2、齿圈D 21、行星架D22、太阳轮D 23、行星轮D 231、轴承J 24、棘爪D 25、弹簧D 3、齿圈C 31、行星架C 32、太阳轮C 33、行星轮C 34、棘爪C 35、弹簧C 4、齿圈A 41、行星架A 42、太阳轮A 43、行星轮A431、轴承D 5、齿圈B 51、行星架B 52、太阳轮B 521、太阳轮固定轮 522、同轴轮 522-1轴承H 53、行星轮B 6、后轮61、后轮车架 611、轴承F 62、后轮轴63、锥齿轮D 631、轴承B 64、锥齿轮E 641、轴承C 7、滑移齿轮组A 71、滑移齿轮轴A 701-齿轮一702-齿轮二703-齿轮三72、拨叉A 73、弹簧A 74、惰轮A 741、轴承G 75、惰轮B 76、惰轮C 8、滑移齿轮组B 801轴承A802-齿轮四 803-齿轮五 804-齿轮六 805-齿轮七 806-齿轮八 81、滑移齿轮轴B 82、拨叉B 83、弹簧B 84、惰轮D 85、惰轮E 86、惰轮F 9、滑移齿轮C 91传动套筒 92、锁定块A 93、锁定块B 94、锁定块C。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
本发明的一种无链式多级变速机构,可应用于自行车中,旋转控制套筒18带动拉绳(所有图中拉绳已省略,拉绳安装在机架上),拉绳将锁定块锁紧(锁定块与拉绳配合结构与目前市场上传统自行车前轮刹车结构相同,区别在于其锁定块内侧具有齿形结构,其下方相应齿轮径向外侧适配有齿形,以增加制动效果)。
操作一:旋转控制套筒18,移动滑移齿轮C 9与太阳轮D 22啮合,人腿向前踩踏脚踏13带动脚踏转轴14正转,通过太阳轮D 22带动齿圈D 2反转,齿圈D 2通过棘爪B 24带动锥齿轮A15反转,锥齿轮A15带动锥齿轮B 16正转,并在传动套筒91作用下带动锥齿轮E 64正转,锥齿轮E 64带动锥齿轮D 63反转,锥齿轮D 63带动行星架B 51正转。(脚踏转轴14通过轴承与车架19固连。锥齿轮A 15、锥齿轮B 16通过轴承E 151、轴承I 161与车架19固连。锥齿轮C 17通过轴承与车架19固连。锥齿轮A 15、锥齿轮C 17内侧为棘轮,且棘轮单向锁定方向相反。行星轮A 43、行星轮B 53、行星轮C 33、行星轮D 23通过轴承分别与行星架A 41、行星架B 51、行星架C 31、行星架D 21固定,并安装有弹性挡圈。太阳轮A 42与后轮轴62固定。太阳轮B 52通过轴承与后轮轴62固定。太阳轮C 32、太阳轮D 22通过轴承分别与脚踏转轴14固定,并在靠近滑移齿轮C 9侧边分布有齿形,用于与滑移齿轮C 9啮合。齿圈C 3、行星架D 21与车架19固定。传动套筒91通过轴承I 161、轴承C 641与车架19、后轮车架61固定,传动套筒91两端分别连接有锥齿轮B 16、锥齿轮E 64。锥齿轮D 63通过轴承B 631与后轮车架61固定。前轮1、后轮6分别通过轴承与前轮车架11、后轮车架61固定。惰轮A 74、惰轮B75、惰轮C 76、惰轮D 84、惰轮E 85、惰轮F 86通过轴承与后轮车架61固定。滑移齿轮组A 7、滑移齿轮组B 8与滑移齿轮轴A 71、滑移齿轮轴B 81采用花键连接,滑移齿轮轴A 71、滑移齿轮轴B 81通过轴承与后轮车架11固定。滑移齿轮C 9与脚踏转轴14采用花键连接。锁定块A 92、锁定块B 93、锁定块C 94均与后轮车架61固定,并分别控制齿圈A 4、太阳轮B 52、齿圈B 5的状态(状态指锁定、可旋转)。棘爪A 44通过弹簧C 35与行星架D 21连接。棘爪B 54通过弹簧D 25与齿圈D 2连接。太阳轮B 52、齿圈A 4、齿圈B 5径向外侧有齿形,以便于锁定块A 92、锁定块B 93、锁定块C 94锁定。
操作二:在操作一的情况下,若控制套筒18控制锁定块C 94锁定齿圈B 5,并控制拨叉A 72带动滑移齿轮组A 7与太阳轮B 52、同轴轮522同时啮合。动力传动路径如下:
行星架B 51(正转)→太阳轮B 52(正转)→滑移齿轮组A 7(反转)→同轴轮522(正转)→后轮轴62(正转)→后轮6(正转)。
操作三:在操作一的情况下,若控制套筒18控制锁定块A 92、锁定块C 94锁定齿圈A 4和齿圈B 5,并控制拨叉A 72带动滑移齿轮组A 7与太阳轮B 52、行星架A 41同时啮合。动力传动路径如下:
行星架B 51(正转)→太阳轮B 52(正转)→滑移齿轮组A 7(反转)→行星架A 41(正转)→太阳轮A 42(正转)→后轮轴62(正转)→后轮6(正转)。
操作四:在操作一的情况下,若控制套筒18控制锁定块A 92锁定齿圈A 4,并控制拨叉B 82带动滑移齿轮组B 8与行星架B 51、惰轮A 74同时啮合。动力传动路径如下:
行星架B 51(正转)→滑移齿轮组B 8(反转)→惰轮A 74)(正转)→惰轮D84(反转)→行星架A 41(正转)→太阳轮A 42(正转)→后轮轴62(正转)→后轮6(正转)。
操作五:在操作一的情况下,若控制套筒18控制锁定块A 92、锁定块C 94锁定齿圈A 4和齿圈B 5,并控制拨叉B 82带动滑移齿轮组B 8与太阳轮B 52、惰轮A 74同时啮合。动力传动路径如下:
行星架B 51(正转)→太阳轮B 52(正转)→滑移齿轮组B 8(反转)→惰轮A 74(正转)→惰轮D 84(反转)→行星架A 41(正转)→太阳轮A 42(正转)→后轮轴62(正转)→后轮6(正转)。
操作六:在操作一的情况下,若控制套筒18控制锁定块B 93、锁定块A 92锁定太阳轮B 52和齿圈A 4,并控制拨叉B 82带动滑移齿轮组B 8与齿圈B 5、惰轮A 74同时啮合。动力传动路径如下:
行星架B 51(正转)→齿圈B 5(正转)→滑移齿轮组B 8)(反转)→惰轮A 74(正转)→惰轮D 84(反转)→行星架A 41(正转)→太阳轮A 42(正转)→后轮轴62(正转)→后轮6(正转)。
操作七:在操作一的情况下,若控制套筒18控制锁定块B 93锁定太阳轮B52,并控制拨叉B 82带动滑移齿轮组B 8与惰轮B 75、齿圈B 5同时啮合。动力传动路径如下:
行星架B 51(正转)→齿圈B 5(正转)→滑移齿轮组B 8(反转)→惰轮B 75(正转)→惰轮E 85(反转)→同轴轮522(正转)→后轮轴62(正转)→后轮6(正转)。
操作八:旋转控制套筒18,移动滑移齿轮C 9与太阳轮C 32啮合,人腿踩踏脚踏13带动脚踏转轴14正转,通过太阳轮C 32带动行星架C 31正转,行星架C 31通过棘爪A 44带动锥齿轮C 17正转,锥齿轮C 17带动锥齿轮B 16正转,并在传动套筒91作用下带动锥齿轮E64正转,锥齿轮E 64带动锥齿轮D 63反转,锥齿轮D 63带动行星架B 51正转。在操作8的情况下,后侧6种传动路径与2、3、4、5、6、7相同;共6种变速。
操作九:该装置控制套筒18可控制滑移齿轮C 9与太阳轮C 32、太阳轮D 22的啮合,也可使其处于空转状态(无啮合状态)。控制套筒18也可同时控制锁定块A 92、锁定块B93、锁定块C 94的状态(夹紧或松开),且同时控制拨叉A 72、拨叉B 82以改变滑移齿轮组A7、滑移齿轮组B 8不同的啮合位置。拨叉A 72、拨叉B 82为交替工作,即拨叉A 72工作时,拨叉B 82带动滑移齿轮组B 8处于最右侧,滑移齿轮组B 8处于无啮合状态。拨叉B 82工作时,拨叉A 72带动滑移齿轮组A 7处于最右侧,滑移齿轮组A 7处于空转状态。
操作十:在推行的过程中,可将控制套筒18旋转至空挡(控制套筒18共可控13种运行情况,共分13档,见图18表格)。此时,滑移齿轮组A 7、滑移齿轮组B 8、滑移齿轮C 9均处于未啮合状态。锁定块A 92、锁定块B 93、锁定块C 94均处于松开状态,使齿圈A 4、齿圈B5、太阳轮B 52处于松开状态,前轮1、后轮6、脚踏13都处于自由状态。
操作十一:在正常骑行过程中,人腿向后踩踏时,棘爪A 44、棘爪B 54处于空回状态,与传统自行车相同。
操作十二:该装置可实现多级变速,级数为十二级(脚踏13处为2级,后轮6处为6级),挡位为13档(含空挡),可为不同使用场合提供骑行助力,具体的传动比,可根据实际需求确定,由各传动构件尺寸决定。
如图19所示,滑移齿轮组A、滑移齿轮组B上各齿轮之间都通过套筒连接,最外侧齿轮设有环形槽,并配有相应环形拨叉,下图以滑移齿轮组A(已省略后面齿轮)与拨叉A的配合关系进行说明。
通过旋转控制套筒18带动拉绳(所有图中拉绳已省略,拉绳安装在机架上),拉绳将拨叉A(安装于机架上)轴向拉出,带动滑移齿轮组A发生移动。拨叉B与滑移齿轮组B关系,与之同理。
具体的说,无链式多级变速机构还包括控制套筒18、拨叉A72、拨叉B82、拨叉C901、锁定块A92、锁定块B93、锁定块C94以及拉绳,控制套筒18通过拉绳控制拨叉A72在滑移齿轮轴A71上移动带动滑移齿轮组A7切换齿轮啮合档位,控制套筒18通过拉绳控制拨叉B82在滑移齿轮轴B81上移动带动滑移齿轮组B8切换齿轮啮合档位,控制套筒18通过拉绳控制拨叉C901在脚踏转轴14上移动带动滑移齿轮C9切换齿轮啮合档位,控制套筒18通过拉绳分别控制锁定块A92锁死齿圈A 4,控制锁定块B93锁死太阳轮B52,控制锁定块C94锁死齿圈B5。
如图20所示,控制套筒18安装于车架19上,控制套筒18分为控制套筒A181、控制套筒B182,控制套筒A181控制锁定块A92、锁定块B93、锁定块C94的锁定或松开,控制套筒B182控制滑移齿轮组A7、滑移齿轮组B8、滑移齿轮C9分别处于不同的啮合状态。
如图21所示,锁定块部分安装在后轮车架61位置,后轮车架61具有侧部固定有横梁部分,该横梁部分上开设有三个孔,横梁部分上部具有固定的锁定块滚筒轴96,锁定块滚筒轴96外围安装有可转动的锁定块滚筒95,锁定块滚筒95上设有三个环形槽,各个环形槽内具有凸轮,锁定块A92、锁定块B93、锁定块C94上部具有活动杆,活动杆一一贯穿横梁部分上开设的三个孔,活动杆外套有锁定块弹簧921,锁定块弹簧921位于锁定块滚筒95与横梁部分之间,控制套筒18通过拉绳控制锁定块滚筒轴96转动,带动各个环形槽内具有凸轮下压锁定块A92、锁定块B93、锁定块C94,实现对齿圈A 4、太阳轮B52、齿圈B5的锁定;
具体的说,锁定块滚筒轴96上固定安装有锁定块滚筒轴承951,锁定块滚筒95内安装有涡卷弹簧97,涡卷弹簧97一端连接锁定块滚筒轴承951,另一端连接锁定块滚筒95,当锁定块滚筒95沿锁定块滚筒轴96转动后起到复位作用。
旋转控制套筒A181通过拉绳(安装在机架上,图中已省略)带动锁定块滚筒95旋转,当锁定块与锁定块滚筒95凸起部分接触,锁定块滚筒95将锁定块A、锁定块B、锁定块C压下,将下方对应齿轮锁定。当锁定块滚筒95滚过凸起部分到凹槽部分时,在相应弹簧的作用下,锁定块上移使下方相应齿轮处于松开状态。
如图24所示,滑移齿轮组A侧部具有限位拨叉A72的槽,拨叉A72的另一端具有顶杆部,滚筒轴A78两端分别通过轴承固定于后轮车架,滚筒轴A78上具有轴承一771和涡卷弹簧A79,滚筒轴A78外安装有可转动的滚筒A77,滚筒A77上具有凸轮,顶杆部端部接触凸轮,顶杆部外具有弹簧A73,弹簧A73一端与后轮车架固定,另一端与拨叉A72固连,后轮车架固定与滚筒轴A78处于同侧,通过弹簧A73将拨叉A72向滚筒A77牵引,保证顶杆部端部压在凸轮上,涡卷弹簧A79一端连接轴承一771,另一端连接滚筒A77,拉绳带动滚筒A77旋转,当滚筒A77沿滚筒轴A78转动后受到涡卷弹簧A79的作用可复位。
旋转控制套筒B182带动拉绳(所有图中拉绳已省略,拉绳安装在机架上),拉绳带动滚筒A77旋转,通过滚筒A(滚筒A内部安装有涡卷弹簧A79,以保证滚筒A复位)径向距离变化使拨叉A(安装于机架上,并配有弹簧)带动滑移齿轮组A发生移动,以实现其不同的啮合位置。
如图27所示,滑移齿轮组B侧部具有限位拨叉B82的槽,拨叉B82的另一端具有顶杆部,滚筒轴B 88两端分别通过轴承固定于后轮车架,滚筒轴B 88上具有轴承二871和涡卷弹簧B89,滚筒轴B 88外安装有可转动的滚筒B87,滚筒B87上具有凸轮(结构与滚筒A77的凸轮结构相同),顶杆部端部接触凸轮,顶杆部外具有弹簧B 83,弹簧B 83一端与后轮车架固定,另一端与拨叉B82固连,后轮车架固定与滚筒轴B 88处于同侧,通过弹簧B 83将拨叉B82向滚筒B87牵引,保证顶杆部端部压在凸轮上,涡卷弹簧B89一端连接轴承二871,另一端连接滚筒B87,拉绳带动滚筒B87旋转,当滚筒B87沿滚筒轴B 88转动后受到涡卷弹簧B89的作用可复位。
如图29所示,滑移齿轮组C的组件结构图,脚踏转轴14侧部具有固定的滚筒轴C903,滚筒轴C903两端分别通过轴承固定于车架,滚筒轴C903上具有轴承三904和涡卷弹簧C905,滚筒轴C903外安装有可转动的滚筒C902,滚筒C902的周向设有螺旋槽,拨叉C901的一端插置于滑移齿轮C9中,另一端嵌于螺旋槽中,涡卷弹簧C905一端连接轴承三904,另一端连接滚筒C902,拉绳带动滚筒C902旋转,当滚筒C902沿滚筒轴C903转动后受到涡卷弹簧C905的作用可复位。
需要说明的是,滚筒A、滚筒B、滚筒C(具体滚筒尺寸由结构尺寸决定)由一根拉绳控制,实现同步转动。滚筒A、滚筒B、滚筒C内部分别安装有涡状弹簧A、涡状弹簧B、涡状弹簧C,以保证滚筒A、滚筒B、滚筒C能够处于空挡状态。
下图为滑移齿轮组A和滑移齿轮组B中的各个齿轮啮合状态表
该图为控制套筒的具体挡位说明图。
该无链式多级变速自行车具有以下优点:
1、可实现脚踏处和后轮处的双变速调节。
2、采用直接传动的方式,减少能量损耗,效率更高。
3、骑行过程中安静、干净、舒适,增加了用户体验。
4、使用寿命长,与链传动自行车对比,骑行时无链条脱落的现象,骑行方便。
5、多种变速级数,可根据不同使用场合进行变挡,使骑行更加省力,增加了实用性。
6、与传统自行车骑行方式相同,无需额外训练。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种无链式多级变速机构
- 无链式自行车的传动变速机构