车辆控制系统
文献发布时间:2023-06-19 11:37:30
技术领域
本发明涉及一种车辆控制系统。
背景技术
传统上,车辆控制系统被配置成当关于车辆发生事件时记录车辆数据(例如,日本专利5106756)。
在这种车辆控制系统中,控制装置可以记录车辆数据。在这种情况下,如果向控制装置提供电力的电源装置发生故障,则控制装置可能不能记录车辆数据,因此不能提取车辆数据。
发明内容
鉴于现有技术的这种问题,本发明的一个主要目的是提供一种车辆控制系统,即使其中一个电源装置发生故障,该车辆控制系统也可以提取车辆数据。
为了实现这样的目的,本发明的一个实施方式提供了一种车辆控制系统1,所述车辆控制系统包括:车辆传感器8,所述车辆传感器被配置成检测车辆状态;第一控制装置14,所述第一控制装置连接至所述车辆传感器并设置有第一记录区域52;第一电源装置19,所述第一电源装置被配置成向所述第一控制装置供应电力;第二控制装置15,所述第二控制装置连接至所述第一控制装置并设置有第二记录区域62;以及第二电源装置20,所述第二电源装置被配置成向所述第二控制装置供应电力,其中,所述第一控制装置被配置成在规定时刻将包括所述车辆状态的车辆数据记录在所述第一记录区域中,并且在规定周期将所述车辆数据传送到所述第二控制装置,并且所述第二控制装置被配置成在规定时刻将从所述第一控制装置接收的所述车辆数据记录在所述第二记录区域中。
根据该布置,即使第一电源装置发生故障,只要第二电源装置没有发生故障,第二控制装置就可以在第二记录区域中记录车辆数据。因此,可以通过使用外部设备等从第二记录区域提取车辆数据。此外,即使第二电源装置发生故障,只要第一电源装置没有发生故障,第一控制装置就可以在第一记录区域中记录车辆数据。因此,可以通过使用外部设备等从第一记录区域提取车辆数据。以这种方式,即使第一电源装置和第二电源装置中的一者发生故障,也可以提取车辆数据。
在上述布置中,优选地,所述车辆控制系统进一步包括事件检测单元10,所述事件检测单元被配置成检测关于车辆2发生的规定事件,其中,所述第一控制装置被配置成在从所述事件检测单元接收到关于所述事件的事件信息时将所述车辆数据记录在所述第一记录区域中,并且所述第二控制装置被配置成在从所述第一控制装置接收到所述事件信息时将所述车辆数据记录在所述第二记录区域中。
根据该布置,可以将事件发生时的车辆数据记录在第一记录区域和第二记录区域中。因此,可以容易地识别事件的原因。
在上述布置中,优选地,所述第一记录区域设置有多个非易失性存储器53,并且在所述第一控制装置以小于规定基准间隔的时间间隔连续接收所述事件信息的情况下,所述第一控制装置每当接收到所述事件信息时将所述车辆数据分别记录在所述非易失性存储器中。
根据该布置,即使连续发生多个事件,每个事件发生时的车辆数据也可以被记录在第一记录区域中。
在上述布置中,优选地,所述第一控制装置被配置成执行所述车辆的自动驾驶控制,每当所述车辆的驾驶控制在所述自动驾驶控制和手动驾驶控制之间切换时就将驾驶切换信息记录在所述第一记录区域中,并且在规定周期将所述驾驶切换信息传送到所述第二控制装置,所述驾驶切换信息是关于所述自动驾驶控制和所述手动驾驶控制之间的切换的信息,并且所述第二控制装置被配置成在从所述第一控制装置接收到所述驾驶切换信息时确定所述驾驶切换信息是否被更新,并且在确定所述驾驶切换信息被更新时将所述驾驶切换信息记录在所述第二记录区域中。
根据该布置,可以将驾驶切换信息记录在第一记录区和第二记录区中。因此,可以容易地在事件发生时识别驾驶主体(乘员或车辆控制系统)。
在上述布置中,优选地,所述第一控制装置被配置成在所述规定周期将所述车辆数据传送到所述第二控制装置,并且所述第二控制装置被配置成当在所述规定周期中断从所述第一控制装置接收所述车辆数据时将所述车辆数据记录在所述第二记录区域中。
根据该布置,在第一电源装置发生故障并且因此第一控制装置不能再将车辆数据传送到第二控制装置的情况下,第二控制装置可以快速地将车辆数据记录在第二记录区域中。
在上述布置中,优选地,所述车辆控制系统进一步包括:被配置成检测车辆外部的物体的位置的第一物体传感器43和第二物体传感器44;以及连接至所述第一控制装置的第三控制装置16,其中,所述第一电源装置被配置成向所述第三控制装置供应电力,所述第二控制装置被配置成从所述第一物体传感器接收检测信号,并且所述第三控制装置被配置成从所述第二物体传感器接收检测信号。
根据该布置,即使第二电源装置发生故障并因此第二控制装置不再能够接收来自第一物体传感器的检测信号,只要第一电源装置没有发生故障,第三控制装置就能够接收来自第二物体传感器的检测信号。类似地,即使第一电源装置发生故障并因此第三控制装置不再能够接收来自第二物体传感器的检测信号,只要第二电源装置没有发生故障,第二控制装置就能够接收来自第一物体传感器的检测信号。以这种方式,即使第一电源装置和第二电源装置中的一者发生故障,也可以接收来自第一物体传感器和第二物体传感器中的一者的检测信号,从而可以识别车辆外部的物体的位置。
在上述布置中,优选地,所述辆控制系统进一步包括:第一线束71,所述第一线束被配置成连接所述第一控制装置和所述第一电源装置;以及第二线束72,所述第二线束被配置成连接所述第二控制装置和所述第二电源装置,其中,所述第一控制装置在第一接地点电接地73,并且所述第二控制装置在第二接地点75电接地,所述第一线束和所述第二线束不捆绑在一起,并且所述第一接地点和所述第二接地点彼此分离。
根据该布置,能够防止第一线束和第二线束同时进入不良连接状态,并且能够防止第一接地点和第二接地点同时进入失灵状态。因此,在第一控制装置和第二控制装置中的一者不能记录车辆数据的情况下,第一控制装置和第二控制装置中的另一者很可能可以记录车辆数据。
在上述布置中,优选地,所述第一控制装置和所述第二控制装置彼此分离,并且所述第一电源装置和所述第二电源装置彼此分离。
根据该布置,可以防止第一控制装置和第二控制装置同时变得不可用,并且防止第一电源装置和第二电源装置同时故障。因此,在第一控制装置和第二控制装置中的一者不能记录车辆数据的情况下,第一控制装置和第二控制装置中的另一者很可能可以记录车辆数据。
在上述布置中,优选地,所述第二控制装置被配置成当在所述第二记录区域中记录所述车辆数据时,执行所述第一记录区域和所述第二记录区域的镜像。
根据该布置,记录在第二记录区中的车辆数据可以与记录在第一记录区中的车辆数据相同。
因此,根据上述布置,可以提供一种即使其中一个电源装置发生故障也能够提取车辆数据的车辆控制系统。
附图说明
图1是根据一个实施方式的车辆控制系统的框图;
图2是车辆控制系统的主要部分的框图;以及
图3是安装有车辆控制系统的车辆的示意性平面图。
具体实施方式
<车辆控制系统1>
下文中,将参照图示描述根据本发明的一个实施方式的车辆控制系统1。车辆控制系统1安装在诸如四轮汽车之类的车辆2上,并且配置成控制车辆2。
参照图1,车辆控制系统1包括传动系4、制动装置5、转向装置6、驾驶操作元件7、车辆传感器8、导航装置9、减震装置10(事件监测单元的实施例)、外部环境识别装置12、人机界面13(HMI)、第一控制装置14至第四控制装置17、第一电源装置19和第二电源装置20以及记录装置21。下文中,将对车辆控制系统1的上述部件进行逐一描述。
传动系4是配置成向车辆2施加驱动力的装置。例如,传动系4包括动力源23和变速器24。动力源23包括诸如汽油发动机或柴油发动机之类的内燃机和电动马达中的至少一种。
制动装置5是配置成向车辆2施加制动力的装置。例如,制动装置5包括:制动卡钳,其配置成将刹车片压在制动转子上;以及电动缸,其配置成向制动卡钳供给油压。
转向装置6是配置成改变车轮的转向角度的装置。例如,转向装置6包括:齿-小齿轮机构,其配置成使车轮转向(转动);以及电动马达,其配置成驱动齿条-小齿轮机构。
驾驶操作元件7是操作元件,该操作元件设置在车辆驾驶室内并配置成接收乘员对车辆2的驾驶操作。例如,驾驶操作元件7包括:方向盘26,其配置成接收车辆2的转向操作;加速踏板27,其配置成接收车辆2的加速操作;制动踏板28,其配置成接收车辆2的制动操作;换档杆29,其配置成接收切换车辆2的换档范围的操作。例如,车辆2的换档范围包括前进范围、后退范围、空档范围、驻车范围等。前进范围是将动力源23的驱动力传递给车轮,从而使车辆2向前移动的换档范围。后退范围是将动力源23的驱动力传递给车轮,从而使车辆2后退的换档范围。空档范围是指车轮可转动,并且动力源23的驱动力不传递给车轮的换档范围。驻车范围是指车轮的旋转受到限制并且动力源23的驱动力不传递到车轮的换档范围。
车辆传感器8是配置成检测各种车辆状态(即车辆2的各种状态)的传感器。例如,车辆传感器8包括:配置成检测车辆2的车速的车速传感器31;配置成检测车辆2的加速度的加速度传感器32;以及配置成检测乘员握持方向盘26的握持传感器33。
导航装置9是配置成获取车辆2的当前位置并提供通往目的地等的路线指引的装置。导航装置9包括GPS接收单元和地图存储单元。GPS接收单元配置成基于从人造卫星(定位卫星)接收的信号来辨识车辆2的当前位置(经纬度)。地图存储单元包括闪存、硬盘等,并且配置成存储地图信息。
减震装置10是配置成吸收由车辆2与车辆2外的物体(例如,另一车辆、障碍物或行人)之间的碰撞(以下称为“车辆碰撞”)引起的震动的装置。例如,减震装置10包括气囊36和发动机罩37(弹出式发动机罩)。例如,气囊36设置在方向盘26和/或乘客座椅中。气囊36在车辆碰撞发生时展开,从而减少对乘员的冲击。例如,发动机罩37配置成从上方覆盖动力源23。在车辆碰撞发生时,发动机罩37部分抬起,从而在发动机罩37和动力源23之间形成空间,并减少对行人的影响。
外部环境识别装置12是配置成检测车辆2外的物体的装置。例如,外部环境识别装置12包括多个雷达43(第一物体传感器的实施例)、多个激光雷达44(第二物体传感器的实施例)以及图像捕获装置45(车辆信息获取单元的实施例)。各个雷达43在车辆2周围发射诸如毫米波之类的无线电波,并捕获反射的无线电波,从而检测车辆2外的物体的位置(车辆2与车辆2外的物体之间的距离以及车辆2外的物体的方向)。各激光雷达44在车辆2周围发射诸如红外线之类的光,并捕获反射光,从而检测车辆2外的物体的位置。图像捕获装置45是配置成捕获车辆2的周围环境图像(车辆信息的实施例;以下简称为“周围环境图像”)的装置。由图像捕获装置45捕获的周围环境图像是移动图像。在另一个实施方式中,图像捕获装置45所捕获的周围环境图像可以是静态图像。图像捕获装置45包括四个摄像头46,这些摄像头分别配置成捕获车辆2的前侧、后侧、左侧和右侧的图像。因此,能够基于图像捕获装置45捕获的周围环境图像准确地识别车辆2的周围环境情况。
人机界面13是一种输入/输出装置,其配置成通知乘员各条信息,并接收乘员的输入操作。例如,HMI 13包括显示装置48和显示开关49。显示装置48包括显示屏幕(例如液晶显示器或有机EL显示器),并且配置成显示周围环境图像。显示开关49配置成接收由乘员执行的周围图环境图像的显示操作(即,显示周围环境图像的操作)。
第一控制装置14至第四控制装置17中的每一者均由包括CPU、ROM、RAM等在内的电子控制单元(ECU)构成,并在CPU根据程序执行算术处理时进行操作。
第一控制装置14经由诸如控制器区域网络(CAN)之类的通信网络连接至传动系4、制动装置5、转向装置6、驾驶操作元件7、车辆传感器8、导航装置9、减震装置10、人机界面13等。
第一控制装置14配置成执行车辆2的自动驾驶控制。当执行自动驾驶控制时,无论乘员对驾驶操作元件7的操作如何,第一控制装置14都控制传动系4、制动装置5和转向装置6中的至少一者。例如,由第一控制装置14执行的自动驾驶控制包括最小风险操纵(MRM)、侧面碰撞缓解(SCM)、道路偏离缓解(RDM)和自动车道改变(ALC)。MRM是指在乘员未响应来自第一控制装置14的驾驶改变请求的情况下,在使自动驾驶控制退化的同时使车辆2移动到安全地点并使车辆2紧急停止的控制。SCM是在检测到车辆2外的物体逼近车辆2的侧面的情况下,使车辆2沿避免或缓解车辆碰撞的方向移动的控制。RDM是在检测到或估计到车辆2偏离行车道的情况下,使车辆2沿避免或缓解车辆2偏离(背离)行车道的方向移动的控制。ALC是自动改变车道的控制。
第一控制装置14配置成执行车辆2的手动驾驶控制。当执行手动驾驶控制时,第一控制装置14根据乘员对驾驶操作元件7的操作来控制传动系4、制动装置5和转向装置6。例如,在执行手动驾驶控制时,第一控制装置14根据配置成来自检测加速踏板27的按压量的加速踏板传感器的信号控制传动系4,根据来自配置成检测制动踏板28的按压量的制动踏板传感器的信号控制制动装置5,并且根据来自配置成检测方向盘26的转动角度的转动角度传感器的信号控制转向装置6。在另一个实施方式中,配置成执行车辆2的手动驾驶控制的控制装置可以与配置成执行车辆2的自动驾驶控制的控制装置分开。
第二控制装置15经由通信网络与雷达43连接。第二控制装置15接收来自雷达43的检测信号并因此将接收到的检测信号进行整合,由此识别车辆2外的物体的位置。第二控制装置15经由通信网络连接至第一控制装置14。
第三控制装置16经由通信网络连接至激光雷达44。第三控制装置16接收来自激光雷达44的检测信号并因此将接收到的检测信号进行整合,由此识别车辆2外的物体的位置。第三控制装置16经由通信网络连接至第一控制装置14。
第四控制装置17经由通信网络连接至传动系4、制动装置5、转向装置6、驾驶操作元件7、车辆传感器8、导航装置9、减震装置10、人机界面13、第一控制装置14等。第四控制装置17经由数字通信线路连接至图像捕获装置45。第四控制装置17配置成从图像捕获装置45接收周围环境图像并将接收到的周围环境图像进行整合。第四控制装置17经由数字通信线路连接至显示装置48,并且配置成将整合的周围环境图像传送到显示装置48。
第四控制装置17配置成执行车辆2的自动驻车控制。在执行自动驻车控制时,无论乘员对驾驶操作元件7的操作如何,第四控制装置17都控制传动系4、制动装置5和转向装置6,从而自动地将车辆2移动到规定的目标驻车位置,并将车辆2停在该位置。
第一电源装置19和第二电源装置20中的每一者均包括电源电路和电池。第一电源装置19连接至第一控制装置14、第三控制装置16和第四控制装置17,并且配置成向第一控制装置14、第三控制装置16和第四控制装置17供应电力。第二电源装置20连接至第二控制装置15,并且配置成向第二控制装置15供应电力。
记录装置21由包括CPU、ROM、RAM等在内的电子控制单元(ECU)构成,并且当CPU根据程序执行算术处理时进行操作。记录装置21经由模拟通信线路连接至第四控制装置17,并配置成从第四控制装置17接收周围环境图像。记录装置21经由通信网络和第四控制装置17连接至第一控制装置14,并配置成从第一控制装置14接收记录请求信号。记录装置21配置成根据来自第一控制装置14的记录请求信号将从第四控制装置17接收到的周围环境图像记录在针对捕获周围环境图像的每个时间范围的文件中,并将周围环境图像存储在记录装置21的内部区域中。例如,在接收来自第一控制装置14的记录请求信号的同时,记录装置21连续(持续)将从第四控制装置17接收到的周围环境图像记录在文件中,并将周围环境图像存储在记录装置21的内部区域中。
<在第一电源装置19和第二电源装置20故障时的控制>
参照图1,在第一电源装置19发生故障的情况下,第一电源装置19不能再向第三控制装置16供应电力。因此,第三控制装置16可能不能接收来自激光雷达44的检测信号。然而,即使在这种情况下,只要第二电源装置20不发生故障,就可以从第二电源装置20向第二控制装置15供应电力。因此,第二控制装置15可以从雷达43接收检测信号,并且通过对接收到的检测信号进行积分来识别车辆2外部的物体的位置。
在第二电源装置20发生故障的情况下,第二电源装置20不能再向第二控制装置15供应电力。因此,第二控制装置15可能不能接收来自雷达43的检测信号。然而,即使在这种情况下,只要第一电源装置19不发生故障,就可以从第一电源装置19向第三控制装置16供应电力。因此,第三控制装置16可以从激光雷达44接收检测信号,并通过对接收到的检测信号进行积分来识别车辆2外部的物体的位置。
这样,在本实施方式中,即使第一电源装置19和第二电源装置20中的一个发生故障,也能够接收来自雷达43或激光雷达44的检测信号,并因此能够识别车辆2外部的物体的位置。因此,在第一控制装置14正在执行车辆2的自动驾驶控制时第一电源装置19和第二电源装置20中的一个故障的情况下,自动驾驶控制可以平稳地退化。
<第一控制装置14和第二控制装置15的配置>
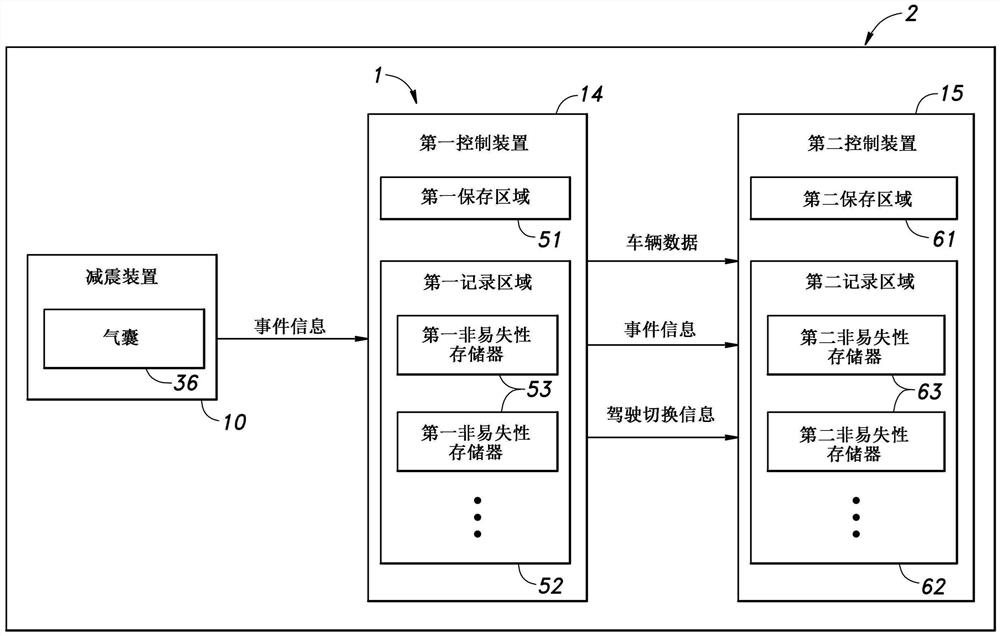
参照图2,第一控制装置14设置有第一保存区域51和第一记录区域52。第一保存区域51包括易失性存储器。第一记录区域52设置有多个第一非易失性存储器53。
第二控制装置15设置有第二保存区域61和第二记录区域62。第二保存区域61包括易失性存储器。第二记录区域62设置有多个第二非易失性存储器63。
<由第一控制装置14和第二控制装置15进行的车辆数据的记录>
参照图2,在车辆2的点火为ON的状态下,通过使用环形缓冲器将针对规定的基准时段Y的规定采样周期X(例如,针对24秒的100毫秒周期)的车辆数据保存在第一保存区域51中。例如,上述车辆数据包括由车辆传感器8检测的车辆状态数据和车辆控制系统1的内部变量。每当在采样周期X获取最新车辆数据时,第一控制装置14将获取的最新车辆数据传送到第二控制装置15。此外,每当在采样周期X获取最新车辆数据时,第一控制装置14用所获取的最新车辆数据覆写第一保存区域51中的车辆数据的一部分(即,一次最旧的采样数据)。因此,第一保存区域51始终保存基准时段Y的最新车辆数据。
在车辆2的点火为ON的状态下,通过使用环形缓冲器将针对基准时段Y的采样周期X的车辆数据保存在第二保存区域61中。每当在采样周期X从第一控制装置14接收到最新车辆数据时,第二控制装置15用接收到的最新车辆数据覆写第二保存区域61中的车辆数据的一部分(即,一次最旧的采样数据)。因此,第二保存区域61总是保存基准时段Y的最新车辆数据。
当关于车辆2发生规定事件时,第一控制装置14接收关于该事件的信息(以下称为“事件信息”)。例如,当气囊36展开时,减震装置10检测气囊36的展开并将事件信息传送到第一控制装置14。因此,第一控制装置14从减震装置10接收事件信息。
在接收到来自减震装置10的事件信息时,第一控制装置14将事件信息传送到第二控制装置15。此外,在从减震装置10接收到事件信息时第一控制装置14将保存在第一保存区域51中的针对基准时段Y的最新车辆数据传送到第一记录区域52,并因此将最新车辆数据记录在其中一个第一非易失性存储器53中。因此,事件发生时的车辆数据可以被记录在第一记录区域52中,并因此可以容易地识别事件的原因。
在连续发生多个事件并因此第一控制装置14以小于规定基准间隔Z的时间间隔连续接收事件信息的情况下,第一控制装置14每当接收到事件信息时就将车辆数据单独记录在第一非易失性存储器53中。因此,即使连续发生多个事件,每个事件发生时的车辆数据也可以被记录在第一记录区域52中。
在接收到来自第一控制装置14的事件信息时第二控制装置15将保存在第二保存区域61中的针对基准时段Y的最新车辆数据传送到第二记录区域62,并因此将最新车辆数据记录在其中一个第二非易失性存储器63中。因此,事件发生时的车辆数据可以被记录在第二记录区域62中,并因此可以容易地识别事件的原因。
当以这种方式在其中一个第二非易失性存储器63中记录最新车辆数据时,第二控制装置15执行第一记录区域52和第二记录区域62的镜像。因此,记录在第二记录区域62中的车辆数据可以与记录在第一记录区域52中的车辆数据相同。在另一实施方式中,当如上所述将最新车辆数据记录在其中一个第二非易失性存储器63中时,第二控制装置15可仅将记录在第一记录区域52中的车辆数据的一部分记录在第二记录区域62中。
在连续发生多个事件并因此第二控制装置15以小于基准间隔Z的时间间隔连续接收事件信息的情况下,第二控制装置15每当接收到事件信息时就将车辆数据分别记录在第二非易失性存储器63中。因此,即使连续发生多个事件,每个事件发生时的车辆数据也可以被记录在第二记录区域62中。
当在采样周期X中断从第一控制装置14接收车辆数据时,第二控制装置15将保存在第二保存区域61中的针对基准时段Y的最新车辆数据传送到第二记录区域62,并因此将最新车辆数据记录在其中一个第二非易失性存储器63中。因此,在第一电源装置19发生故障并因此第一控制装置14不能再将车辆数据传送到第二控制装置15的情况下,第二控制装置15可以快速地将车辆数据记录在第二记录区域62中。
如上所述,在本实施例中,连接至第一电源装置19的第一控制装置14将车辆数据记录在第一记录区域52中,连接至第二电源装置20的第二控制装置15将车辆数据记录在第二记录区域62中。因此,即使第一电源装置19发生故障,只要第二电源装置20没有发生故障第二控制装置15就可以将车辆数据记录在第二记录区域62中。因此,可以通过使用外部设备等从第二记录区域62提取车辆数据。此外,即使第二电源装置20发生故障,只要第一电源装置19没有发生故障第一控制装置14就可以将车辆数据记录在第一记录区域52中。因此,可以通过使用外部设备等从第一记录区域52提取车辆数据。这样,即使第一电源装置19和第二电源装置20中的一个发生故障,也可以提取车辆数据。
<由第一和第二控制装置14和15进行的驾驶切换信息的记录>
每当在自动驾驶控制和手动驾驶控制之间切换车辆2的驾驶控制时,第一控制装置14在第一记录区域52中记录驾驶切换信息。驾驶切换信息是关于自动驾驶控制和手动驾驶控制之间的切换的信息。例如,驾驶切换信息包括关于车辆2的驾驶控制何时在自动驾驶控制和手动驾驶控制之间切换的切换时刻的信息以及关于车辆2在切换时刻的位置的信息。第一控制装置14在采样周期X将驾驶切换信息传送到第二控制装置15。
每当在采样周期X从第一控制装置14接收到驾驶切换信息时,第二控制装置15确定驾驶切换信息是否被更新(本次接收的驾驶切换信息与最近一次接收的驾驶切换信息是否不同)。在第二控制装置15确定驾驶切换信息被更新的情况下,第二控制装置15在第二记录区域62中记录驾驶切换信息。另一方面,在第二控制装置15确定驾驶切换信息没有被更新的情况下,第二控制装置15不在第二记录区域62中记录驾驶切换信息。
以这种方式,在本实施方式中,驾驶切换信息被记录在第一记录区域52和第二记录区域62中。因此,在事件发生时可以容易地识别驾驶主体(乘员或车辆控制系统1)。
<车辆2中的车辆控制系统1的布置>
接下来,参照图3,描述车辆2中的车辆控制系统1的布置。图3中的箭头Fr、Rr、L和R分别表示车辆2的前侧、后侧、左侧和右侧。
第一控制装置14和第二控制装置15布置在车辆2的后部。第一控制装置14和第二控制装置15彼此分离。第一电源装置19布置在车辆2的前部,第二电源装置20布置在车辆2的后部。第一电源装置19和第二电源装置20彼此分离。
根据这样的布置,可以防止第一控制装置14和第二控制装置15同时变得不可用,并且防止第一电源装置19和第二电源装置20同时发生故障。因此,在第一控制装置14和第二控制装置15中的一者不能记录车辆数据的情况下,第一控制装置14和第二控制装置15中的另一者很可能可以记录车辆数据。
第一控制装置14和第一电源装置19经由第一线束71彼此连接,第二控制装置15和第二电源装置20经由第二线束72彼此连接。第一线束71和第二线束72彼此分离,并且不捆绑在一起。第一接地点73设置在车辆2的后部,第一控制装置14在该第一接地点电接地。第一控制装置14和第一接地点73经由第一接地线74彼此连接。第二接地点75设置在车辆2的前后方向上的中心部分处,第二控制装置15在该第二接地点电接地。第二控制装置15和第二接地点75经由第二接地线76彼此连接。第一接地点73和第二接地点75彼此分离。
根据这样的布置,可以防止第一线束71和第二线束72同时落入不良连接状态,并且防止第一接地点73和第二接地点75同时落入失灵状态。因此,在第一控制装置14和第二控制装置15中的一者不能记录车辆数据的情况下,第一控制装置14和第二控制装置15中的另一者很可能可以记录车辆数据。
已在前文中描述了本发明的具体实施方式,但本发明不应受到前述实施方式的限制,在本发明的范围内可以进行各种变型和变更。
- 车辆控制系统验证装置、车辆控制系统以及车辆控制系统验证方法
- 车辆用控制装置、车辆用控制系统、车辆用控制方法及车辆用控制系统的控制方法