蛇形机器人及其控制方法
文献发布时间:2023-06-19 11:37:30
技术领域
本发明涉及救援机器人技术领域,特别涉及一种蛇形机器人及其控制方法。
背景技术
目前的蛇形机器人主要有电机直驱式和拉线式两种方式,电机直驱式是在每个关节模块中内置电机或气动装置驱动关节运动。拉线式驱动方式是通过外置驱动源拉动钢丝绳,进而驱动各关节运动。在一些地震灾害中,很多受困者被困在废墟之中,由于救援时间紧张,而且在废墟之下缺少食物与清水,导致救援时间非常紧张,往往救援效果不佳,使获救人数大大地减少,因此,受限于短暂的抢救时间和险峻的地形地势,提供一种能够灵活移动于险峻地形中且抢险救灾能力强的机器人就显得尤为重要。
例如,专利申请号为CN201721604850.8的中国专利公开一种用于救灾的蛇形机器人,包括头部、躯干部、关节部和尾部,所述躯干部包括第一躯干部和第二躯干部,所述第一躯干部上设置有滚轮,所述第二躯干部内设置有容纳腔,所述容纳腔用于容纳救济物品,在所述第二躯干部上设置有与所述容纳腔相连的支架,用于输送救济物品,所述第一躯干部和所述第二躯干部分别铰接于所述关节部的两端,所述关节部上设置有生命探测仪,所述头部与关节部铰接相连,且所述头部上设置有用于探测的摄像头和红外探测器。然而,上述现有的蛇形机器人对救援生命垂危的受困者时,无能为力,因此,如何开发一种便于援救在废墟之中的生命垂危的受困者已成为本领域亟待解决的技术问题。
发明内容
本发明解决的技术问题是,提供一种便于援救在废墟之中的生命垂危的受困者的蛇形机器人及其控制方法。
第一方面,本发明提供一种蛇形机器人,包括驱动控制主体及蛇形臂,所述蛇形臂与所述驱动控制主体相连,其还包括活动隔离组件、视觉导航组件、生命探测组件、供氧组件及供液组件,所述视觉导航组件安装在所述蛇形臂的自由端上,用于给所述驱动控制主体提供导航信息;所述生命探测组件安装在所述蛇形臂的自由端上,用于探测生命迹象;所述供氧组件的出氧端位于所述活动隔离组件内,用于提供氧气;
所述供液组件的出液端位于所述活动隔离组件内,用于提供营养液;所述活动隔离组件安装在所述蛇形臂的自由端,用于保护所述出氧端及出液端;在第一状态时,所述活动隔离组件关闭,并遮盖在所述出氧端及出液端上;在第二状态时,所述活动隔离组件打开,从而解除对所述出氧端及出液端的遮盖,使所述出氧端及出液端裸露出来。
在一个实施例中,所述活动隔离组件包括驱动器、驱动杆、固定板、安装板、若干连接板、若干活动板、若干遮盖片,所述驱动杆贯穿所述固定板设置并与所述固定板之间形成有间隙,所述驱动杆的第一端与所述驱动器相连,所述驱动杆的第二端与所述安装板相连,所述固定板固定在所述蛇形臂的自由端上;
所述连接板的第一端与所述固定板固定连接,所述连接板的第二端与所述遮盖片固定连接,所述活动板的第一端与所述安装板铰接,所述活动板的第二端与所述连接板相铰接;在第一状态时,若干所述遮盖片相接触并形成覆盖所述出氧端及出液端的容纳空间;在第二状态时,所述遮盖片之间相互间隔。
在一个实施例中,所述遮盖片的纵截面呈弧形,所述遮盖片的自由到所述遮盖片的固定端的厚度逐渐增大,所述遮盖片的固定端与所述连接板相连。
在一个实施例中,所述出氧端与所述出液端相连,所述出氧端包括第一出氧口及第二出氧口,所述第一出氧口与所述第二出氧口间隔设置,所述出液端包括出液口,所述出液口到所述第一出氧口之间的距离与所述出液口到所述第二出氧口之间的距离相等。
在一个实施例中,所述蛇形机器人还包括语音播放组件,所述语音播放组件安装在所述蛇形臂上,用于在所述生命探测组件探测到有生命迹象时发出语音信号。
在一个实施例中,所述蛇形机器人还包括录音组件,所述录音组件安装在所述蛇形臂上,用于在所述生命探测组件探测到有生命迹象时进行录音,并将声音信息发送给目标移动终端。
在一个实施例中,所述蛇形机器人还包括照明组件,所述照明组件安装在所述蛇形臂的自由端上,用于提供照明。
在一个实施例中,所述蛇形机器人还包括唤醒组件,所述唤醒组件安装在所述活动隔离组件内并与所述驱动控制主体电连接,用于唤醒受困者。
在一个实施例中,所述蛇形机器人还包括气流感应模块,所述气流感应模块安装在所述活动隔离组件内并与所述驱动控制主体电连接,用于检测受困者是否有呼吸。
第二方面,本发明还公开一种如上述第一方面任一项所述的蛇形机器人的控制方法,包括如下步骤:
获取生命迹象;
根据所述生命迹象,获取受困者的鼻孔图像信息;
根据所述鼻孔图像信息,打开所述活动隔离组件并控制供氧组件的出氧端移动至受困者的鼻孔;
获取供氧组件的出氧端的到位信息;
根据所述到位信息,控制所述供氧组件为受困者供氧及控制供液组件向所述受困者的口腔输送营养液。
本发明具有如下有益效果:本发明通过所述活动隔离组件、视觉导航组件、生命探测组件、供氧组件及供液组件之间的配合,当需要对废墟中的受困者进行援救时,通过所述蛇形臂伸入废墟内,然后通过所述生命探测组件对废墟内的受困者进行探测,当发现有受困者时,打开所述活动隔离组件并控制供氧组件的出氧端移动至受困者的鼻孔,然后控制所述供氧组件为受困者供氧及控制供液组件向所述受困者的口腔输送营养液,因而,便于援救在废墟之中的生命垂危的受困者,提高了救援的成功率。
附图说明
图1为本发明蛇形机器人的原理框图。
图2为本发明蛇形机器人的结构示意图。
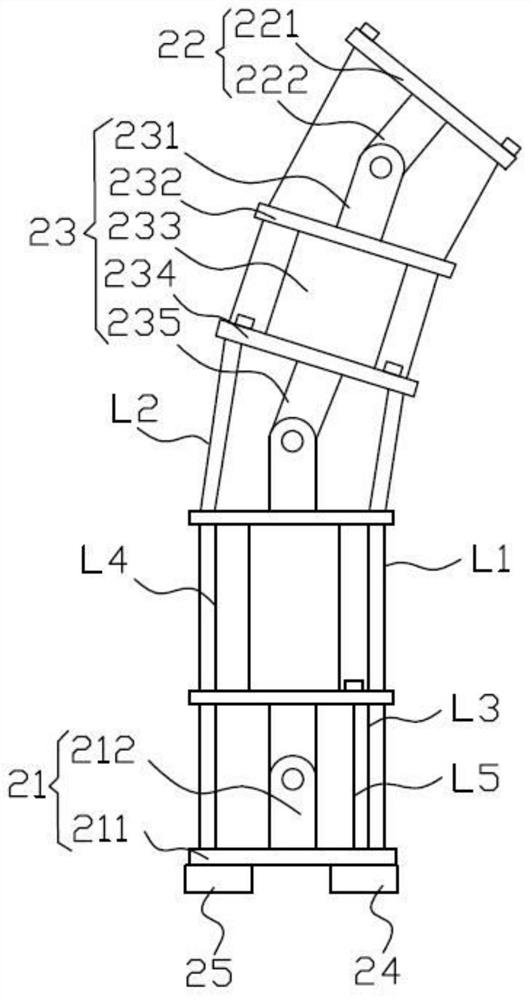
图3为本发明蛇形机器人的蛇形臂的结构示意图。
图4为图2所示本发明蛇形机器人A区域的放大图。
图5为本发明蛇形机器人的控制方法的流程图。
具体实施方式
下面结合附图和实施例对本发明进行详细说明。需要说明的是,如果不冲突,本发明实施例以及实施例中的各个特征可以相互结合,均在本发明的保护范围之内。
请参阅图1至图4,本发明提供一种蛇形机器人,包括驱动控制主体1、蛇形臂2、视觉导航组件3、生命探测组件4、供氧组件5、供液组件6及活动隔离组件7,所述驱动控制主体1用于控制所述蛇形臂2动作,所述驱动控制主体1内设置有控制器。所述蛇形臂2与所述驱动控制主体1相连,其包括关节组、驱动绳组、第一绳收放器及第二绳收放器,所述关节组包括第一关节21、第二关节22及第三关节23,其中,所述第三关节23的数量为两个。
所述第一关节21包括第一板体部211及第一铰接部212,第二关节22包括第二板体部221及第二铰接部222,与第二关节22相连的第三关节23包括第三上铰接部231、第三上板体部232、关节体233、第三下板体部234及第三下铰接部235,与第一关节21相连的第三关节23包括第三上铰接部231、第三上板体部232、关节体233、第三下板体部234及第三下铰接部235。
所述驱动绳组包括第一驱动绳L1、第二驱动绳L2、第三驱动绳L3、第四驱动绳L4及第五驱动绳L5,所述第一驱动绳L1一端贯穿第二板体部221 右侧的穿孔后通过固定帽锁止在第二板体部221的上端面的右侧,另一端依次贯穿第三上板体部232、第三下板体部234、第三上板体部232、第三下板体部234和第一板体部211右侧的穿孔后固定于第一绳收放器24上。
所述第二驱动绳L2一端贯穿第二板体部221左侧的穿孔后通过固定帽锁止在第二板体部221的上端面的左侧,另一端依次贯穿第三上板体部232、第三下板体部234、第三上板体部232、第三下板体部234和第一板体部211左侧的穿孔后固定于第二绳收放器25上。所述第三驱动绳L3一端贯穿第三下板体部234右侧的穿孔后通过固定帽锁止在第三下板体部234的上端面的右侧,另一端依次贯穿第三上板体部232、第三下板体部234和第一板体部211 右侧的穿孔后固定于第一绳收放器24上。
第四驱动绳L4一端贯穿第三下板体部234左侧的穿孔后通过固定帽锁止在第三下板体部234的上端面的左侧,另一端依次贯穿第三上板体部232、第三下板体部234和第一板体部211左侧的穿孔后固定于第二绳收放器25上。所述第五驱动绳L5一端贯穿第三下板体部234右侧的穿孔后通过固定帽锁止在第三下板体部234的上端面的右侧,另一端贯穿第一板体部211右侧的穿孔后固定于第一绳收放器24上。所述第一绳收放器24及所述第二绳收放器 25安装在所述驱动控制主体1内。
当需要控制所述顺时针转动某一角度时,所述控制器控制所述第一绳收放器24,第一绳收放器24牵引第一驱动绳L1驱动第二关节22顺时针转动某一可控角度,在第一绳收放器24牵引第一驱动绳L1的同时,控制第二绳收放器25同步地放开第二驱动绳L2。蛇形臂2在保持静止状态时,第一绳收放器24牵引和第二绳收放器25同时收紧第一驱动绳L1及第二驱动绳L2以保持关节的刚度。同理,也可以控制第二关节22逆时针转动某一角度。
所述视觉导航组件3安装在所述蛇形臂2的自由端上,用于给所述驱动控制主体1提供导航信息。所述生命探测组件4安装在所述蛇形臂2的自由端上,用于探测生命迹象。具体地,所述视觉导航组件3及所述生命探测组件4均安装于所述第二关节22上。所述供氧组件5的出氧端位于所述活动隔离组件7内,所述供氧组件5用于提供氧气,所述供氧组件5可以包括带有控制阀的微型氧气瓶及氧气管,所述微型氧气瓶位于所述驱动控制主体1内并受所述驱动控制主体1内的控制器控制,所述氧气管与所述微型氧气瓶相连并经由所述蛇形臂2延伸至所述活动隔离组件7内,所述氧气管的自由端即为所述出氧端51。
所述供液组件6的出液端位于所述活动隔离组件7内,所述供液组件6 用于提供营养液,所述营养液可以是葡萄糖口服液等。所述供液组件6可以包括微量泵及输液管,所述微量泵位于所述驱动控制主体1内并受所述驱动控制主体1内的控制器控制,所述输液管与所述微量泵相连并经由所述蛇形臂2延伸至所述活动隔离组件7内,所述输液管的自由端即为所述出液端 61。
所述出氧端51与所述出液端61相连,所述出氧端51包括第一出氧口及第二出氧口,所述第一出氧口与所述第二出氧口间隔设置,所述出液端61包括出液口,所述出液口到所述第一出氧口之间的距离与所述出液口到所述第二出氧口之间的距离相等,因而,可更好地对准用户的鼻孔及口腔,便于输送氧气及营养液。
所述活动隔离组件7安装在所述蛇形臂2的自由端,用于保护所述出氧端51及出液端61。在第一状态时,所述活动隔离组件7关闭,并遮盖在所述出氧端51及出液端61上,因而可保护所述出氧端51及出液端61,从而不易受废墟中的灰层等杂物污染。在第二状态时,所述活动隔离组件7打开,从而解除对所述出氧端51及出液端61的遮盖,使所述出氧端51及出液端61 裸露出来。也就是说,当需要给病人供养气及输液时,控制所述活动隔离组件7打开。
所述活动隔离组件7包括驱动器71、驱动杆72、固定板73、安装板74、若干连接板75、若干活动板76及若干遮盖片77,所述驱动器71与所述控制器电连接并受所述控制器控制,所述驱动杆72贯穿所述固定板73设置并与所述固定板73之间形成有间隙,所述出液端61及所述出氧端51均固定在所述安装板74上,所述驱动杆72的第一端与所述驱动器71相连,所述驱动杆 72的第二端与所述安装板74相连,所述固定板73固定在所述蛇形臂2的自由端上。
所述连接板75的第一端与所述固定板73固定连接,所述连接板75的第二端与所述遮盖片77固定连接,所述活动板76的第一端与所述安装板74铰接,所述活动板76的第二端与所述连接板75相铰接。在第一状态时,若干所述遮盖片77相接触并形成覆盖所述出氧端51及出液端61的容纳空间。在第二状态时,所述遮盖片77之间相互间隔,以使所述出氧端51与所述出液端61很好地裸露出来。也就是说,当需要打开所述活动隔离组件7打开时,所述控制器控制所述驱动器71,使所述驱动杆72向上运动预设距离,从而使所述活动隔离组件7打开。
所述遮盖片77的纵截面呈弧形,所述遮盖片77的自由到所述遮盖片77 的固定端的厚度逐渐增大,所述遮盖片77的固定端与所述连接板75相连,因而,结构较可靠,且当碰触到用户时,能够发生弹性形变,以致不伤到用户。较佳地,所述遮盖片77可由硅胶等弹性材料制成。
在另一个实施例中,所述蛇形机器人还包括均与所述控制器电连接的语音播放组件、录音组件、照明组件、气流感应模块及唤醒组件,所述语音播放组件安装在所述蛇形臂2上,用于在所述生命探测组件4探测到有生命迹象时,在所述控制器的控制下发出语音信号。例如,“别慌,我们来救你了”等让受困者减轻心理压力的声音。
所述录音组件安装在所述蛇形臂2上,用于在所述生命探测组件4探测到有生命迹象时进行录音,并将声音信息发送给目标移动终端,所述目标移动终端可以是救援者的手机,从而可以倾听受困者的需求,以及从受困者了解周围是否有受困人员,便于援救。
所述照明组件安装在所述蛇形臂2的自由端上,用于提供照明,以利于救援。所述气流感应模块安装在所述活动隔离组件7内,用于检测受困者是否有呼吸。所述唤醒组件安装在所述活动隔离组件7内,用于唤醒受困者,即在受困者生命垂危时,对受困者进行唤醒。当所述气流感应模块对受困者的鼻孔检测到气流微弱时,则说明受困者生命垂危。其中,所述唤醒组件可以为电刺激组件,用于对生命垂危的受困者进行电刺激,以唤醒受困者。通过电刺激进行救助,其具有安全及易于实施的优点。
在另一种实施例中,所述蛇形机器人还包括振动马达,所述振动马达安装在所述活动隔离组件7内,用于在向受困者输送营养液时进行振动。因而,可以使营养液能够顺利输送给吞咽困难的受困者,进一步提高了救援的成功率。
请参阅图5,本发明还公开上述所述的蛇形机器人的控制方法,包括如下步骤:
S1、获取生命迹象;
所述控制器根据生命探测组件4传送过来的信号获取受困人员的生命迹象。
S2、根据所述生命迹象,获取受困者的鼻孔图像信息;
在获取生命迹象后,根据视觉导航组件3提供的信息,控制所述蛇形臂2 寻找受困者的面部,并根据面部搜寻受困者的鼻孔,从而获取受困者的鼻孔图像信息。
S3、根据所述鼻孔图像信息,打开所述活动隔离组件7并控制供氧组件 5的出氧端51移动至受困者的鼻孔;
在所述蛇形臂2的自由端运动到预设位置后,所述控制器控制所述驱动器71驱动所述驱动杆72运动到预设位置,从而打开所述活动隔离组件7。
S4、获取供氧组件5的出氧端51的到位信息;
根据视觉导航组件3提供的信息,从而可计算供氧组件5的出氧端51是否伸至受困者的鼻孔处。
S5、根据所述到位信息,控制所述供氧组件5为受困者供氧及控制供液组件6向所述受困者的口腔输送营养液。
较佳地,所述控制方法在所述步骤S5之后还包括如下步骤:
获取气流感应模块传输过来的受困者鼻孔的气流值;
当所述气流值小于预设值时,控制唤醒组件唤醒受困者。
综上所述,本发明通过所述活动隔离组件7、视觉导航组件3、生命探测组件4、供氧组件5及供液组件6之间的配合,当需要对废墟中的受困者进行援救时,通过所述蛇形臂2伸入废墟内,然后通过所述生命探测组件4对废墟内的受困者进行探测,当发现有受困者时,打开所述活动隔离组件7并控制供氧组件5的出氧端移动至受困者的鼻孔,然后控制所述供氧组件5为受困者供氧及控制供液组件6向所述受困者的口腔输送营养液,因而,便于援救在废墟之中的生命垂危的受困者,提高了救援的成功率。
以上对本发明所提供的蛇形机器人及其控制方法进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容仅为本发明的实施方式,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内,不应理解为对本发明的限制。
- 一种基于CPG模型的蛇形机器人及其关节轨迹/刚度控制方法
- 蛇形机器人及其控制方法