一种应用机器视觉检测的滚筒式花生清洗设备
文献发布时间:2023-06-19 11:39:06
技术领域
本发明涉及花生加工领域,具体是涉及一种应用机器视觉检测的滚筒式花生清洗设备。
背景技术
花生,原名落花生,是我国产量丰富、食用广泛的一种坚果,又名“长生果”、“泥豆”等。属蔷薇目,豆科一年生草本植物,茎直立或匍匐,长30-80厘米,翼瓣与龙骨瓣分离,荚果长2-5厘米,宽1-1.3厘米,膨胀,荚厚,花果期6-8月。主要分布于巴西、中国、埃及等地。可用于制皂和生发油等化妆品的原料。
在花生的加工过程中,对花生进行清洗是其中一个工序,传统的方式是通过人工手动进行,存在以下缺陷:人们的劳动强度大,清洗效率低,速度慢,且需要人工判断清洗的洁净度,容易造成清洗不干净或水资源浪费。
发明内容
为解决上述技术问题,提供一种应用机器视觉检测的滚筒式花生清洗设备,本技术方案解决了上述问题,具体的,通过设置视觉检测装置可以有效保证清洗效果且避免资源浪费,通过俯仰运动装置可以方便地调节滚筒的角度以实现上料、出料、排液等工序,操作便捷,结构稳定,工作效率高。
为达到以上目的,本发明采用的技术方案为:
一种应用机器视觉检测的滚筒式花生清洗设备,其特征在于,包括有,
机架;
滚筒,滚筒内壁均匀地分布有搅拌叶,滚筒的末端可拆卸地安装有用以将清洗液滤除的滤网,滚筒用以对花生进行清洗;
旋转驱动装置,旋转驱动装置可翻转地设置在机架上,旋转驱动装置的工作端与滚筒连接,旋转驱动装置用以驱动滚筒围绕其自身轴线旋转;
俯仰运动装置,俯仰运动装置底部与机架固定连接,俯仰运动装置的输出端与旋转驱动装置的两侧连接,俯仰运动装置用以驱动旋转驱动装置进行俯仰运动;
第一导向槽,第一导向槽安装在旋转驱动装置上并位于滚筒前端开口处,第一导向槽的输出端与滚筒的前端开口对接,第一导向槽用以将花生导入和导出滚筒;
第二导向槽,第二导向槽的结构与第一导向槽相同,第二导向槽安装在旋转驱动装置上并位于滚筒的后端滤网处,第二导向槽的输入端与滚筒后端的滤网对接,第二导向槽用以将通过滤网的水导出;
进液装置,进液装置安装在旋转驱动装置上并位于第一导向槽远离滚筒的一侧,进液装置用以向滚筒内注入清洗液;
视觉检测装置,视觉检测装置安装在旋转驱动装置上并位于第二导向槽远离滚筒的一侧,视觉检测装置的工作端朝向第二导向槽设置,视觉检测装置用以对通过第二导向槽的污水进行清洁度检测。
优选的,旋转驱动装置包括有,
旋转架,旋转架的两侧与俯仰运动装置的输出端连接,旋转架的一端与第一导向槽、进液装置固定连接,旋转架的另一侧与第二导向槽、视觉检测装置固定连接,旋转架与滚筒转动连接;
齿环,齿环固定套设在滚筒的周壁上,齿环用以驱动滚筒围绕自身轴线旋转;
齿轮,齿轮可旋转地设置在旋转架上,齿轮与齿环啮合传动,齿轮用以驱动齿环旋转;
主轴,主轴插设在齿轮内且两端与旋转架转动连接,主轴用以驱动齿轮旋转;
第一旋转驱动器,第一旋转驱动器安装在旋转架上,第一旋转驱动器的输出轴与主轴的端部连接,第一旋转驱动器用以驱动主轴旋转。
优选的,旋转架与滚筒的连接处为分体式卡箍。
优选的,俯仰运动装置包括有,
旋转轴,旋转轴设有一对且对称地设置在旋转驱动装置的两侧,一对旋转轴的轴线共线切分别与机架的两侧转动连接,旋转轴用以带动旋转驱动装置进行俯仰运动;
传动机构,传动机构的输出端与旋转轴连接,传动机构用以驱动旋转轴旋转;
第二旋转驱动器,第二旋转驱动器安装在机架上,第二旋转驱动器的输出轴与传动机构的输入端连接,第二旋转驱动器用以向传动机构输出扭矩。
优选的,传动机构包括有,
蜗轮,蜗轮套设在旋转轴上,蜗轮用以带动旋转轴围绕自身轴线旋转;
蜗杆,蜗杆可旋转地设置在机架上,蜗杆与蜗轮啮合,蜗杆的端部与第二旋转驱动器的输出轴连接,蜗杆用以驱动蜗轮旋转。
优选的,第一导向槽包括有,
弧形凹槽,弧形凹槽的输出端与滚筒的前端开口对接,弧形凹槽用以对花生进行引导;
抬升立板,抬升立板安装在弧形凹槽的底部且与旋转驱动装置固定连接,抬升立板用以对弧形凹槽进行支撑。
优选的,进液装置包括有,
喷头,喷头的输入端与供液管路柔性连接,喷头的工作端朝向滚筒前端的开口,喷头用以向滚筒内注入清洗液;
喷头安装板,喷头安装板与喷头固定连接,喷头安装板用以对喷头进行支撑;
导向杆,导向杆设有多个且对称地设置在喷头安装板上端,导向杆用以防止喷头安装板偏转;
升降装置,升降装置安装在旋转驱动装置的一端,升降装置的工作端与喷头安装板连接,升降装置与导向杆沿竖直方向间隙配合,升降装置用以控制喷头安装板的升降。
优选的,导向杆顶端可拆卸地设置有限位块。
优选的,升降装置包括有,
直线驱动器,直线驱动器的输出轴与喷头安装板固定连接,直线驱动器的驱动方向竖直指向旋转驱动装置,直线驱动器用以控制喷头安装板的升降;
第一悬架,第一悬架安装在旋转驱动装置的一端,第一悬架与导向杆沿竖直方向间隙配合,第一悬架与直线驱动器固定连接,第一悬架用以对直线驱动器进行支撑。
优选的,视觉检测装置包括有视觉传感器和第二悬架;第二悬架安装在旋转驱动装置上远离进液装置的一端,第二悬架用以对视觉传感器提供支撑,视觉传感器安装在第二悬架上且工作端朝向第二导向槽设置,视觉传感器用以对通过第二导向槽的清洗液的洁净程度进行检测。
本发明与现有技术相比具有的有益效果是:
1、通过设置视觉检测装置可以有效保证清洗效果且避免资源浪费,具体的,第二悬架为视觉传感器提供支撑。第二悬架通过识别清洗液的颜色判断清洁度,从而判断滚筒内的花生清洁程度,当清洁度合格时通过控制器关闭进液装置的进液,有效避免了资源浪费,继而进行排水和花生的出料,节奏连贯,工作效率高;
2、通过俯仰运动装置可以方便地调节滚筒的角度以实现上料、出料、排液等工序,操作便捷,具体的,控制器发送信号给第二旋转驱动器,第二旋转驱动器收到信号后驱动传动机构工作,传动机构带动旋转轴围绕自身轴线旋转,从而使旋转驱动装置进行俯仰运动;
3、传动机构的驱动效果强劲稳定,具体的,蜗杆将第二旋转驱动器输出的扭矩传递给蜗轮。蜗杆和蜗轮的传动结构提高了输出扭矩,且具有一定的自锁能力,提高了旋转驱动装置俯仰运动的稳定性。
附图说明
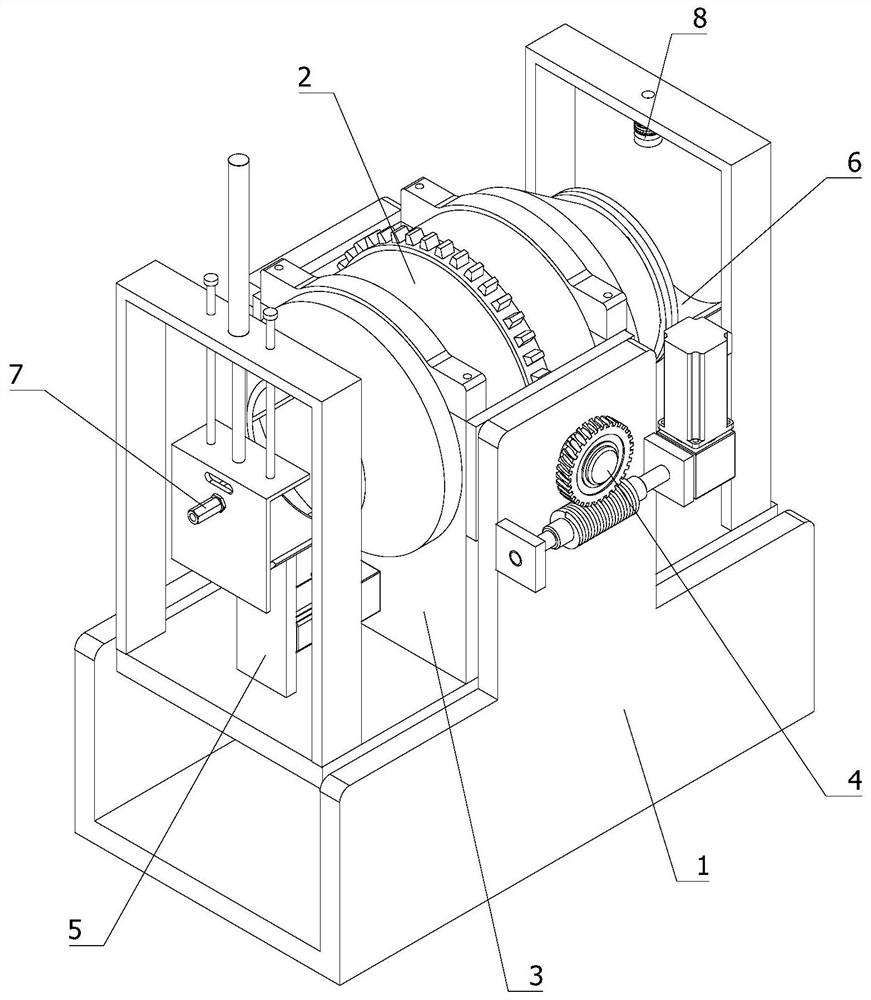
图1为本发明的立体图;
图2为本发明的滚筒立体图;
图3为本发明的正视图;
图4为图3中A-A截面剖视图;
图5为本发明的局部立体图;
图6为本发明的分体式卡箍立体示意图;
图7为本发明的立体图二;
图8为本发明的侧视图;
图9为本发明的第一导向槽立体图;
图10为本发明的进液装置立体图。
图中标号为:
1-机架;
2-滚筒;2a-滤网;
3-旋转驱动装置;3a-旋转架;3a1-分体式卡箍;3b-齿环;3c-齿轮;3d-主轴;3e-第一旋转驱动器;
4-俯仰运动装置;4a-旋转轴;4b-传动机构;4b1-蜗轮;4b2-蜗杆;4c-第二旋转驱动器;
5-第一导向槽;5a-弧形凹槽;5b-抬升立板;
6-第二导向槽;
7-进液装置;7a-喷头;7b-喷头安装板;7c-导向杆;7c1-限位块;7d-升降装置;7d1-直线驱动器;7d2-第一悬架;
8-视觉检测装置;8a-视觉传感器;8b-第二悬架。
具体实施方式
以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
如图1-4所示,一种应用机器视觉检测的滚筒式花生清洗设备,包括有,机架1;
滚筒2,滚筒2内壁均匀地分布有搅拌叶,滚筒2的末端可拆卸地安装有用以将清洗液滤除的滤网2a,滚筒2用以对花生进行清洗;
旋转驱动装置3,旋转驱动装置3可翻转地设置在机架1上,旋转驱动装置3的工作端与滚筒2连接,旋转驱动装置3用以驱动滚筒2围绕其自身轴线旋转;
俯仰运动装置4,俯仰运动装置4底部与机架1固定连接,俯仰运动装置4的输出端与旋转驱动装置3的两侧连接,俯仰运动装置4用以驱动旋转驱动装置3进行俯仰运动;
第一导向槽5,第一导向槽5安装在旋转驱动装置3上并位于滚筒2前端开口处,第一导向槽5的输出端与滚筒2的前端开口对接,第一导向槽5用以将花生导入和导出滚筒2;
第二导向槽6,第二导向槽6的结构与第一导向槽5相同,第二导向槽6安装在旋转驱动装置3上并位于滚筒2的后端滤网处,第二导向槽6的输入端与滚筒2后端的滤网2a对接,第二导向槽6用以将通过滤网2a的水导出;
进液装置7,进液装置7安装在旋转驱动装置3上并位于第一导向槽5远离滚筒2的一侧,进液装置7用以向滚筒2内注入清洗液;
视觉检测装置8,视觉检测装置8安装在旋转驱动装置3上并位于第二导向槽6远离滚筒2的一侧,视觉检测装置8的工作端朝向第二导向槽6设置,视觉检测装置8用以对通过第二导向槽6的污水进行清洁度检测。
旋转驱动装置3、俯仰运动装置4、进液装置7和视觉检测装置8均与控制器电连接,所述清洗液为水。准备阶段,工作人员通过控制器发送信号给俯仰运动装置4,俯仰运动装置4收到信号后驱动旋转驱动装置3带着滚筒2翻转,使其前端开口倾斜朝上。供料设备将待清洗的花生倒入滚筒2前端开口,第一导向槽5可以对花生起到承接作用,避免花生掉出,掉落的花生沿着第一导向槽5滑入滚筒2内部。控制器发送信号给俯仰运动装置4,俯仰运动装置4收到信号后将滚筒2置于水平状态。控制器发送信号给进液装置7,进液装置7收到信号后通过滚筒2前端的开口将清洗液导入滚筒2内,第一导向槽5可以防止水溅落。控制器发送信号给旋转驱动装置3,旋转驱动装置3收到信号后控制滚筒2进行翻转,滚筒2通过其内部的搅拌叶对花生和清洗液进行搅拌,从而使花生表面的脏污溶入清洗液中。控制器发送信号给俯仰运动装置4,俯仰运动装置4收到信号后将滚筒2的开口上扬,从而使清洗液可以通过滚筒2的后端滤网流出至第二导向槽6,最终从第二导向槽6的输出端排出。通过调节滚筒2的俯仰角度控制清洗液排出的速度。视觉检测装置8对流经第二导向槽6的清洗液进行检测,通过其颜色识别清洗液的清洁程度,从而判断滚筒2内花生清洗的洁净度,视觉检测装置8发送信号给控制器。当花生清洗干净后,控制器发送信号给俯仰运动装置4,俯仰运动装置4收到信号后通过翻转滚筒2使其内部的清洗液全部从滚筒2后端排出,然后再将滚筒2的前端开口向下翻转,将花生沿着第一导向槽5倒出。花生沿着第一导向槽5滑入收集装置内,至此完成全部清洗作业。
如图5所示,旋转驱动装置3包括有,
旋转架3a,旋转架3a的两侧与俯仰运动装置4的输出端连接,旋转架3a的一端与第一导向槽5、进液装置7固定连接,旋转架3a的另一侧与第二导向槽6、视觉检测装置8固定连接,旋转架3a与滚筒2转动连接;
齿环3b,齿环3b固定套设在滚筒2的周壁上,齿环3b用以驱动滚筒2围绕自身轴线旋转;
齿轮3c,齿轮3c可旋转地设置在旋转架3a上,齿轮3c与齿环3b啮合传动,齿轮3c用以驱动齿环3b旋转;
主轴3d,主轴3d插设在齿轮3c内且两端与旋转架3a转动连接,主轴3d用以驱动齿轮3c旋转;
第一旋转驱动器3e,第一旋转驱动器3e安装在旋转架3a上,第一旋转驱动器3e的输出轴与主轴3d的端部连接,第一旋转驱动器3e用以驱动主轴3d旋转。
第一旋转驱动器3e为与控制器电连接的伺服电机。控制器发送信号给第一旋转驱动器3e,第一旋转驱动器3e收到信号后驱动主轴3d旋转。主轴3d带动齿轮3c旋转,继而带动与齿轮3c啮合的齿环3b围绕自身轴线旋转。齿环3b旋转时带动滚筒2在旋转架3a上围绕其自身轴线旋转。
如图6所示,旋转架3a与滚筒2的连接处为分体式卡箍3a1。
分体式卡箍3a1通过螺栓相互连接,分体式卡箍3a1内侧设置轴承,从而确保滚筒2的稳定旋转,拆装方便,图中轴承未示出。
如图7所示,俯仰运动装置4包括有,
旋转轴4a,旋转轴4a设有一对且对称地设置在旋转驱动装置3的两侧,一对旋转轴4a的轴线共线切分别与机架1的两侧转动连接,旋转轴4a用以带动旋转驱动装置3进行俯仰运动;
传动机构4b,传动机构4b的输出端与旋转轴4a连接,传动机构4b用以驱动旋转轴4a旋转;
第二旋转驱动器4c,第二旋转驱动器4c安装在机架1上,第二旋转驱动器4c的输出轴与传动机构4b的输入端连接,第二旋转驱动器4c用以向传动机构4b输出扭矩。
第二旋转驱动器4c为与控制器电连接的伺服电机。控制器发送信号给第二旋转驱动器4c,第二旋转驱动器4c收到信号后驱动传动机构4b工作,传动机构4b带动旋转轴4a围绕自身轴线旋转,从而使旋转驱动装置3进行俯仰运动。
如图8所示,传动机构4b包括有,
蜗轮4b1,蜗轮4b1套设在旋转轴4a上,蜗轮4b1用以带动旋转轴4a围绕自身轴线旋转;
蜗杆4b2,蜗杆4b2可旋转地设置在机架1上,蜗杆4b2与蜗轮4b1啮合,蜗杆4b2的端部与第二旋转驱动器4c的输出轴连接,蜗杆4b2用以驱动蜗轮4b1旋转。
蜗杆4b2将第二旋转驱动器4c输出的扭矩传递给蜗轮4b1。蜗杆4b2和蜗轮4b1的传动结构提高了输出扭矩,且具有一定的自锁能力,提高了旋转驱动装置3俯仰运动的稳定性。
如图9所示,第一导向槽5包括有,
弧形凹槽5a,弧形凹槽5a的输出端与滚筒2的前端开口对接,弧形凹槽5a用以对花生进行引导;
抬升立板5b,抬升立板5b安装在弧形凹槽5a的底部且与旋转驱动装置3固定连接,抬升立板5b用以对弧形凹槽5a进行支撑。
通过抬升立板5b对弧形凹槽5a提供稳定的支撑作用,使弧形凹槽5a的输出端可以和滚筒2的开口对接。弧形凹槽5a不随滚筒2的旋转而旋转,发挥稳定的引导作用。
如图10所示,进液装置7包括有,
喷头7a,喷头7a的输入端与供液管路柔性连接,喷头7a的工作端朝向滚筒2前端的开口,喷头7a用以向滚筒2内注入清洗液;
喷头安装板7b,喷头安装板7b与喷头7a固定连接,喷头安装板7b用以对喷头7a进行支撑;
导向杆7c,导向杆7c设有多个且对称地设置在喷头安装板7b上端,导向杆7c用以防止喷头安装板7b偏转;
升降装置7d,升降装置7d安装在旋转驱动装置3的一端,升降装置7d的工作端与喷头安装板7b连接,升降装置7d与导向杆7c沿竖直方向间隙配合,升降装置7d用以控制喷头安装板7b的升降。
升降装置7d与控制器电连接。通过升降装置7d调节喷头安装板7b的高度,从而可以使其避免对滚筒2中的花生出料时造成阻挡。导向杆7c有效提高了喷头安装板7b运动的稳定性。
如图10所示,导向杆7c顶端可拆卸地设置有限位块7c1。
通过螺栓将限位块7c1安装在导向杆7c的顶端,通过设置限位块7c1可有效防止喷头安装板7b意外跌落,可以保证结构的稳定性和安全性,且拆装方便。
如图8所示,升降装置7d包括有,
直线驱动器7d1,直线驱动器7d1的输出轴与喷头安装板7b固定连接,直线驱动器7d1的驱动方向竖直指向旋转驱动装置3,直线驱动器7d1用以控制喷头安装板7b的升降;
第一悬架7d2,第一悬架7d2安装在旋转驱动装置3的一端,第一悬架7d2与导向杆7c沿竖直方向间隙配合,第一悬架7d2与直线驱动器7d1固定连接,第一悬架7d2用以对直线驱动器7d1进行支撑。
直线驱动器7d1为与控制器电连接的电动推杆。控制器发送信号给直线驱动器7d1,直线驱动器7d1收到信号后驱动喷头安装板7b进行升降。第一悬架7d2通过与导向杆7c的配合提高了喷头安装板7b运动的稳定性。
如图7所示,视觉检测装置8包括有视觉传感器8a和第二悬架8b;第二悬架8b安装在旋转驱动装置3上远离进液装置7的一端,第二悬架8b用以对视觉传感器8a提供支撑,视觉传感器8a安装在第二悬架8b上且工作端朝向第二导向槽6设置,视觉传感器8a用以对通过第二导向槽6的清洗液的洁净程度进行检测。
视觉传感器8a为与控制器电连接的CCD相机。第二悬架8b为视觉传感器8a提供支撑。第二悬架8b通过识别清洗液的颜色判断清洁度,从而判断滚筒2内的花生清洁程度,当清洁度合格时通过控制器关闭进液装置7的进液,有效避免了资源浪费,继而进行排水和花生的出料,节奏连贯,工作效率高。
本发明的工作原理:
本装置通过以下步骤实现本发明的功能,进而解决了本发明提出的技术问题:
步骤一、准备阶段,工作人员通过控制器发送信号给俯仰运动装置4,俯仰运动装置4收到信号后驱动旋转驱动装置3带着滚筒2翻转,使其前端开口倾斜朝上。
步骤二、供料设备将待清洗的花生倒入滚筒2前端开口,第一导向槽5可以对花生起到承接作用,避免花生掉出,掉落的花生沿着第一导向槽5滑入滚筒2内部。
步骤三、控制器发送信号给俯仰运动装置4,俯仰运动装置4收到信号后将滚筒2置于水平状态。
步骤四、控制器发送信号给进液装置7,进液装置7收到信号后通过滚筒2前端的开口将清洗液导入滚筒2内,第一导向槽5可以防止水溅落。
步骤五、控制器发送信号给旋转驱动装置3,旋转驱动装置3收到信号后控制滚筒2进行翻转,滚筒2通过其内部的搅拌叶对花生和清洗液进行搅拌,从而使花生表面的脏污溶入清洗液中。
步骤六、控制器发送信号给俯仰运动装置4,俯仰运动装置4收到信号后将滚筒2的开口上扬,从而使清洗液可以通过滚筒2的后端滤网流出至第二导向槽6,最终从第二导向槽6的输出端排出。通过调节滚筒2的俯仰角度控制清洗液排出的速度。
步骤七、视觉检测装置8对流经第二导向槽6的清洗液进行检测,通过其颜色识别清洗液的清洁程度,从而判断滚筒2内花生清洗的洁净度,视觉检测装置8发送信号给控制器。当花生清洗干净后,控制器发送信号给俯仰运动装置4,俯仰运动装置4收到信号后通过翻转滚筒2使其内部的清洗液全部从滚筒2后端排出,然后再将滚筒2的前端开口向下翻转,将花生沿着第一导向槽5倒出。花生沿着第一导向槽5滑入收集装置内,至此完成全部清洗作业。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
- 一种应用机器视觉检测的滚筒式花生清洗设备
- 一种区分检测花生黑腐病菌和花生基腐病菌的双重PCR检测引物及应用