一种道路智能安防监控系统
文献发布时间:2023-06-19 11:39:06
技术领域
本发明涉及道路安防监控领域,特别是涉及一种道路智能安防监控系统。
背景技术
随着数字视频处理技术的发展,各种道路视频监控系统广泛应用于道路安全管理,如何实现道路监控视频数据的有效处理是一个重要的问题。道路监控视频具有区别于一般视频的特点,摄像机固定于一个位置对道路场景进行拍摄,几乎不存在场景变换,对于车辆超速检测,目前主要有三种方法:1.移动式测速方法;2.固定式测速方法;3.两个站点间距离平均测速方法。但是视频数据量越大,检索效率越低,如何从车辆进入到离开监控范围的视频序列中自动得到最能清晰反映车辆车牌、车型等信息的关键帧图像是能够快速实现超速检测的关键。
为了能够得到最能得到清晰反映车辆车牌、车型等信息的关键帧图像,需要保证视频摄像头的安装精度;并且车辆超速检测和跟踪过程复杂,关键帧处理速度较慢,超速判定实时性差。
发明内容
鉴于以上所述现有技术的缺点,本发明的目的在于提供一种道路智能安防监控系统,解决了现有技术中车辆超速检测和跟踪过程复杂,关键帧处理速度较慢,超速判定实时性差的问题。
本发明提供一种道路智能安防监控系统,所述安防监控系统包括图像采集单元、图像处理单元、车辆超速判定单元、数据存储单元以及数据传输单元;所述图像采集单元用于实时采集车辆图像数据;所述图像处理单元用于从图像采集单元读取车辆图像数据,并且提取车辆图像数据的关键帧;所述车辆超速判定单元用于读取车辆图像的关键帧,并且对前后关键帧的颜色值进行比较识别出车辆信息,判断车辆是否超速;所述数据存储单元用于存储车辆图像的关键帧和车辆超速判定结果;所述数据传输单元用于将车辆超速判定结果上传云服务器。
于本发明的一实施例中,所述图像处理单元是利用分类器进行特征识别,从图像数据中提取关键帧;所述图像处理单元处理步骤如下:
(1)从图像采集单元采集的监控视频序列中提取车辆目标,从每一帧序列图像中截取车辆目标最小外接矩阵图像;
(2)将所有车辆目标的最小外接矩阵图像转换成像素大小一致的转换图像;
(3)将所有的转换图像作为样本图像源,将样本图像源中符合车辆监控分析要求的作为正样本图像,将样本图像源中不符合车辆监控分析要求的作为负样本图像;
(4)标记所有的正样本图像和负样本图像,并且设置正样本图像的权重为1,负样本图像的权重为0;
(5)利用分类器对多帧序列图像的正图像样本进行图像打分,得分最高的序列图像作为关键帧。
于本发明的一实施例中,所述车辆超速判定单元是利用YUV颜色空间特征,将前后关键帧的颜色值进行比较识别出车辆信息,判断车辆是否超速;所述车辆超速判定单元处理步骤如下:
(1)将前后车辆图像的关键帧从RGB颜色空间转换到YUV空间;
(2)将YUV空间的前后车辆图像的关键帧平均分割成N段,并且对N段中的一个子段进行判断,判断对应子段中车辆颜色信号变化分量大小,并且将N段的颜色车辆信号变化分量进行求和,如果颜色信号变化分量之和超过预先设置的阀值,则舍弃车辆图像的关键帧,设置前后车辆图像的关键帧为不关联;反之,则保存车辆图像的关键帧,设置前后车辆图像的关键帧为关联;
(3)通过最小二乘法计算一系列关联的关键帧的车辆速度,根据标定关系转化为实际车辆速度,如果实际车辆速度超过预先设置的阀值,则判定车辆超速。
于本发明的一实施例中,所述图像采集单元为全方位图像采集传感器。
于本发明的一实施例中,所述图像处理单元、车辆超速判定单元均为微处理器上的虚拟单元,所述数据存储单元为与微处理器电连接的存储器。
于本发明的一实施例中,所述数据传输单元为与微处理器电连接的无线通信单元,所述无线通信单元包括4G模块、Zigbee模块、Bluetooth模块、WI-FI模块以及NB-IoT模块。
如上所述,本发明的一种道路智能安防监控系统,具有以下有益效果:本发明通过微处理器的软件单元快速、准确得提取车辆图像数据的关键帧,基于前后关键帧的颜色进行比较识别出车辆信息,判断车辆是否超速,并且将超速判定结果实时传输到云服务器,便于车主实时获取车辆超速情况,解决了技术中车辆超速检测和跟踪过程复杂,关键帧处理速度较慢,超速判定实时性差的问题。
附图说明
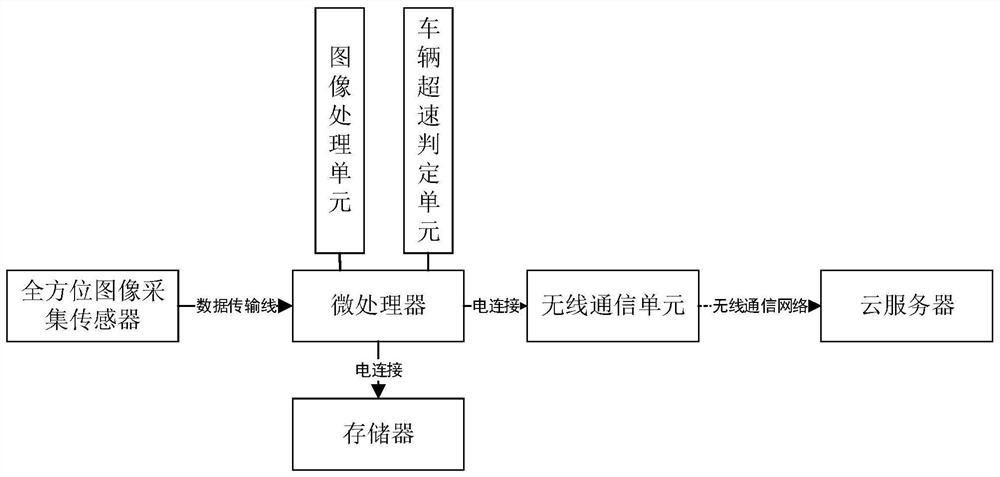
图1显示为本发明实施例中公开的道路智能安防监控系统的结构示意图。
图2显示为本发明实施例中公开的道路智能安防监控系统的原理图。
图3显示为本发明实施例中公开的图像处理单元的步骤流程图。
图4显示为本发明实施例中公开的车辆超速判定单元的步骤流程图。
具体实施方式
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,遂图式中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
如图2所示,本发明提供一种道路智能安防监控系统,所述安防监控系统包括图像采集单元、图像处理单元、车辆超速判定单元、数据存储单元以及数据传输单元;所述图像采集单元用于实时采集车辆图像数据;所述图像处理单元用于从图像采集单元读取车辆图像数据,并且提取车辆图像数据的关键帧;所述车辆超速判定单元用于读取车辆图像的关键帧,并且对前后关键帧的颜色值进行比较识别出车辆信息,判断车辆是否超速;所述数据存储单元用于存储车辆图像的关键帧和车辆超速判定结果;所述数据传输单元用于将车辆超速判定结果上传云服务器。
其中,如图1所示,所述图像采集单元为全方位图像采集传感器;所述图像处理单元、车辆超速判定单元均为微处理器上的软件单元,所述数据存储单元为与微处理器电连接的存储器;所述数据传输单元为与微处理器电连接的无线通信单元,所述无线通信单元包括4G模块、Zigbee模块、Bluetooth模块、WI-FI模块以及NB-IoT模块。
具体的,所述图像处理单元是利用分类器进行特征识别,从图像数据中提取关键帧;如图3所示,所述图像处理单元处理步骤如下:
(1)从图像采集单元采集的监控视频序列中提取车辆目标,从每一帧序列图像中截取车辆目标最小外接矩阵图像;
(2)将所有车辆目标的最小外接矩阵图像转换成像素大小一致的转换图像;
(3)将所有的转换图像作为样本图像源,将样本图像源中符合车辆监控分析要求的作为正样本图像,将样本图像源中不符合车辆监控分析要求的作为负样本图像;
其中,符合车辆监控分析要求是指转换图像的在序列图像中的面积比例为50%以上,不符合车辆监控分析要求是指转换图像的在序列图像中的面积比例为50%以下。
(4)标记所有的正样本图像和负样本图像,并且设置正样本图像的权重为1,负样本图像的权重为0;
(5)利用分类器对多帧序列图像的正图像样本进行图像打分,得分最高的序列图像作为关键帧。
具体的,所述车辆超速判定单元是利用YUV颜色空间特征,将前后关键帧的颜色值进行比较识别出车辆信息,判断车辆是否超速;如图4所示,所述车辆超速判定单元处理步骤如下:
(1)将前后车辆图像的关键帧从RGB颜色空间转换到YUV空间;
(2)将YUV空间的前后车辆图像的关键帧平均分割成N段,并且对N段中的一个子段进行判断,判断对应子段中车辆颜色信号变化分量大小,并且将N段的颜色车辆信号变化分量进行求和,如果颜色信号变化分量之和超过预先设置的阀值,则舍弃车辆图像的关键帧,设置前后车辆图像的关键帧为不关联;反之,则保存车辆图像的关键帧,设置前后车辆图像的关键帧为关联;
(3)通过最小二乘法计算一系列关联的关键帧的车辆速度,根据标定关系转化为实际车辆速度,如果实际车辆速度超过预先设置的阀值,则判定车辆超速。
综上所述,本发明通过微处理器的软件单元快速、准确得提取车辆图像数据的关键帧,基于前后关键帧的颜色进行比较识别出车辆信息,判断车辆是否超速,并且将超速判定结果实时传输到云服务器,便于车主实时获取车辆超速情况,解决了技术中车辆超速检测和跟踪过程复杂,关键帧处理速度较慢,超速判定实时性差的问题。所以,本发明有效克服了现有技术中的种种缺点而具高度产业利用价值。
上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
- 一种道路智能安防监控系统
- 一种广角高清智能安防监控系统