一种智慧城市环境异常监测装置
文献发布时间:2023-06-19 11:39:06
技术领域
本发明涉及智慧城市技术领域,尤其涉及一种智慧城市环境异常监测装置。
背景技术
智慧城市理念需要基于物联网基础设施、云计算基础设施、地理空间基础设施将整个城市变得更加可视化,便于充分运用信息和通信技术手段感测、分析、整合城市运行核心系统的各项关键信息,这些技术的基础,首先要对整个城市的三维立体信息构件空间模型,但是由于现代城市结构复杂,传统固定式摄像头与扫描仪存在空间死角,通常应对办法采用摄像头可旋转,但是任然无法解决空间死角问题,只能通过多个摄像头相互组合拍摄才能解决成本较高,而通过车辆摄像与扫描成本也过大,而且容易堵塞交通,尤其现代扫描设备扫描过程较慢无法短时间内扫描出较为完成的空间模型。
发明内容
本发明所要解决的技术问题,是针对上述存在的技术不足,提供了一种智慧城市环境异常监测装置,采用驱动整个环形件沿路径实现往复运动的运动组件,实现了检测组件可以在电杆或灯杆外侧沿电杆或灯杆移动,以减小空间盲区,解决了传统监测设备单一摄像头存在固定视觉死角无法解决的问题;采用高度计且可上下移动往复式拍摄与监测,避免了传统固定式监测摄像头存在空间死角,且对距离的判断不够准确,而且不同高度时的画面与高度信息配合,从而保证了后续进行空间建模还原时数据更加准确,在移动过程中,监测设备可实时记录周围环境的影像与三维信息,进而可基于影像实现人脸识别、环境状况监测、车辆信息监测、以及通过影像实现的其他功能。
为解决上述技术问题,本发明所采用的技术方案是:包括两个半环件首尾可拆卸连接形成的环形件;驱动整个环形件沿路径实现往复运动的运动组件;以及在往复运动过程中实现数据监测和记录的监测组件;所述运动组件包括L型支杆、滚轮与电机;所述L型支杆一侧与环形件连接设置;所述L型支杆另一侧端部设置有依靠电机驱动的滚轮;所述监测组件在环形件上两侧设置;所述监测组件包括高度计、三维激光扫描仪、全景相机。
进一步优化本技术方案,所述L型支杆与环形件之间通过伸缩杆连接。
进一步优化本技术方案,所述伸缩杆外侧设置有弹簧。
进一步优化本技术方案,所述L型支杆两臂向内侧延伸设置;所述L型支杆两臂的端部设置有滚轮;在一个端部的端部一侧设置有用于驱动该端部滚轮转动的电机。
进一步优化本技术方案,所述L型支杆两臂等长设置。
进一步优化本技术方案,所述L型支杆两臂之间夹角为90°。
进一步优化本技术方案,所述L型支杆两臂之间设置有加强筋。
与现有技术相比,本发明具有以下优点:1、驱动整个环形件沿路径实现往复运动的运动组件,此结构有利的保证了检测组件可以在电杆或灯杆外侧沿电杆或灯杆移动,以减小空间盲区;2、高度计且可上下移动往复式拍摄与监测,此结构有利的保证了不同高度时的画面与高度信息配合,从而保证了后续进行空间建模还原时数据更加准确,在移动过程中,监测设备可实时记录周围环境的影像与三维信息,进而可基于影像实现人脸识别、环境状况监测、车辆信息监测、以及通过影像实现的其他功能。
附图说明
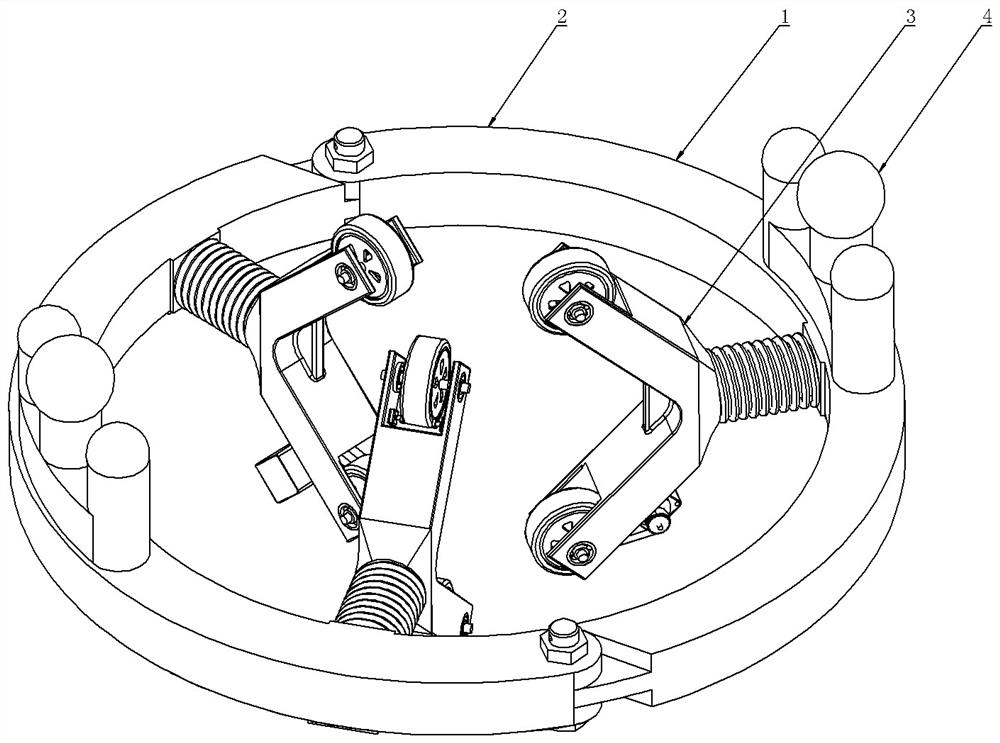
图1为一种智慧城市环境异常监测装置的整体上侧结构示意图。
图2为一种智慧城市环境异常监测装置的整体下侧结构示意图。
图3为一种智慧城市环境异常监测装置的监测组件结构示意图。
图中:1、半环件;2、环形件;3、运动组件;4、监测组件;5、L型支杆;6、伸缩杆;7、滚轮;8、电机;9、三维激光扫描仪;10、全景相机;11、加强筋;12、弹簧。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
具体实施方式:结合图1-3所示,
包括两个半环件1首尾可拆卸连接形成的环形件2;便于将整个设备套设于电杆或灯杆外侧实现监控效果;驱动整个环形件2沿路径实现往复运动的运动组件3;保证了检测组件可以在电杆或灯杆外侧沿电杆或灯杆移动,以减小空间盲区;以及在往复运动过程中实现数据监测和记录的监测组件4;在监测环境影像与三维信息时,由于检测组件内置有高度计,便于后续数据在三维影像还原建模的计算;所述运动组件3包括沿环形件2内侧向内设置的L型支杆5;所述L型支杆5与环形件2之间通过伸缩杆6连接;所述L型支杆5两臂向内侧延伸设置;所述L型支杆5两臂的端部设置有滚轮7;在一个端部的端部一侧设置有用于驱动该端部滚轮7转动的电机8;实现了驱动整个环形件2沿电杆或灯杆长度方向移动,且可缓慢移动和往复移动,从而实现了保证环境信息监测的准确性;所述监测组件4在环形件2上两侧设置;避免了灯杆或电杆本身形成的监测盲区;所述监测组件4包括高度计、三维激光扫描仪9、全景相机10;采用了高度计且可上下移动往复式拍摄与监测;避免了传统固定式监测摄像头存在空间死角,且对距离的判断不够准确,而且不同高度时的画面与高度信息配合,从而保证了后续进行空间建模还原时数据更加准确。
所述L型支杆5沿环形件2内侧周向等距设置有3个;保证了环形件2稳定向内抵住电杆或灯杆,进而实现后续稳定循环往复的监测工作;
所述半环件1首尾通过螺栓可拆卸连接;
所述L型支杆5两臂等长设置;
所述L型支杆5两臂之间夹角为90°;
所述L型支杆5两臂之间设置有加强筋11;
伸缩杆6外侧套设有弹簧12。
使用时,结合图1-3所示,将半环件1一侧首尾连接螺栓拆开后,将整个环形件2套设于电杆或灯杆外侧,再将螺栓安装紧固,这时,由于环形件2内侧周向设置的三个L型支杆5,保证了环形件2周向向内抵住电杆或灯杆,通过伸缩杆6与外侧弹簧12配合,保证了环形件2与不同尺寸灯杆或电杆都可实现配合安装;安装完成后,电机8带动位于L型支杆5一臂端部的滚轮7转动,从而将整个环形件2沿电杆或灯杆长度方向移动,在移动过程中,监测设备可实时记录周围环境的影像与三维信息,进而可基于影像实现人脸识别、环境状况监测、车辆信息监测、以及通过影像实现的其他功能,由于监测设备整体可在电杆或灯杆上往复式移动,从而避免了固定视角监测时的视野盲区,提高了单一监控设备的检测效率,而且加之配合的三维激光扫描仪9与高度计,从而可以更加精确完成对楼宇众多的城市复杂环境的三维信息建模与还原作业,便于后续的可视化作业。
本发明的控制方式是通过控制器来自动控制,控制器的控制电路通过本领域的技术人员简单编程即可实现,属于本领域的公知常识,并且本发明主要用来保护机械设置,所以本发明不再详细解释控制方式和电路连接。
应当理解的是,本发明的上述具体实施方式仅仅用于示例性说明或解释本发明的原理,而不构成对本发明的限制。因此,在不偏离本发明的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。此外,本发明所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
- 一种智慧城市环境异常监测装置
- 一种智慧城市交通指挥监测装置