一种亚孔径阵列干涉星敏感器
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及一种亚孔径阵列干涉成像星敏感器,可应用于航天器姿态测量和旋转角速率测量技术领域,亚孔径阵列是指在星敏感器的光学系统的整孔径内有若干个直径小于整孔径的子孔径,且该若干个直径小于整孔径的子孔径按照星点簇要求和干涉光学系统设计的结果规律性排列成阵列。
背景技术
目前对于航天器的姿态测量经常使用星敏感器,这种敏感器的主要原理是:利用恒星位置相对于惯性空间基本不动的规律,通过对一个天区的恒星光电成像获取星图,再对星图进行处理和识别得到测量敏感器光轴在惯性空间指向,经过星敏感器在航天器安装坐标系与航天器姿态坐标系的转换即可得到航天器的三轴姿态。
现有技术中,星敏感器硬件包括遮光罩、光学系统(镜头)、电子学系统、电器和结构接口、星图处理与姿态计算软件。电子学系统包括探测器成像组件、信息处理单元、电源模块、内部外部电连接,星图处理与姿态计算软件主要包括星图预处理模块、星图匹配模块、姿态计算模块、通讯模块等。星敏感器的主要技术指标包括三轴测角精度、数据更新率、杂光抑制能力等,星敏感器的精度指标是其核心技术指标,代表着星敏感器光轴指向的误差大小。以往技术中,星敏感器光学系统一般都采用透射式光学系统,在透射式光学系统中也有采用折射衍射的设计方案的。折反射或者反射式光学系统虽然有学者研究,但是真正应用到星敏感器产品中的却很少,一般针对超高精度或者超高精度星敏感器(精度优于0.5角秒)才采用折反射或者反射式光学系统。
无论以上哪种星敏感器光学系统,都存在着相对孔径、视场角、焦距、成像质量之间的相互制约关系,以上参数与星敏感器的测量精度之间也存在制约关系。一般星敏感器测量精度取决于单星定位精度和多星统计精度的综合,理论上等于单星定位精度和捕获导航星星数平方根的乘积,因此如何提高单星定位精度和所捕获的导航星数量成为提高星敏感器精度的主要途径,而单星定位精度取决于星点的瞬时视场和星点提取精度的乘积,所捕获的导航星数量与星敏感器的口径和视场角大小,以及探测灵敏度有关。在超高精度星敏感器技术领域,一般采用折反射或者反射式光学系统,主要采用长焦距和小视场实现提高单星定位精度的目的。这种设计虽然可以解决目前的超高精度星敏感器的方案问题,但是也带来了以下不足。
现有技术主要存在的不足如下:
(1)目前超高精度星敏感器(精度为0.1〞量级)采用的折反射光学系统成像结构带来重量较大的问题,同类产品一般都在10kg以上。
(2)受到相对孔径、视场角、焦距、成像质量之间的相互制约关系限制,星敏感器单幅星图捕获的恒星数量有限,限制了精度进一步提高。
(3)现有超高精度星敏感器的消杂光采用常规的单一孔径遮光罩,导致长度和重量相对较大。
(4)现有星敏感器精度阈滞效应导致其最高精度水平在十分秒(0.1〞)量级停滞不前,未来更多科学任务的数据获取,需要厘秒(0.01〞)或以上精度定向精度支撑,必须要创新解决。很多科学任务需要极高精度的定向和导航数据,比如超大比例尺空间对地测绘卫星、分布式卫星空间相对姿态和位置保持、太空激光瞄准、深海和全球长航时飞行天文导航等,星敏感器的精度越高,定向和导航的精度也就越高。现有仪器的高频误差和低频误差降低到一定的水平时就不再下降,而是达到了一个阈值停滞不前,称为阈滞效应,其主要原因是仪器探测器固有噪声、温度场不均匀等带来的成像失稳、成像点非理想高斯分布、探测器的几何与响应不均匀性等误差源无法消除,其中显示出高频特性的误差我们称为高频误差(如白噪声误差),显示为低频特性的误差我们称为低频误差(如温度误差),目前消除这些误差的方法有内外两种,内部是靠设计性能和器件材料精细化保证,外部靠标定、提高单星位置提取精度、增加导航星点的数量降低整体误差水平。虽然从标定方法和标定设备的创新也可以得到精度提升,但是受到标定仪器误差限制,这种提高也会出现0.1〞的阈值效应。单星位置提取精度的提高受到高频和低频误差影响,一般难以超越某个阈值,实际产品测量值多在0.1像素左右,虽然理论上可以达到0.01像素。导航星数量取决于星敏感器视场和探测灵敏度,按照现有原理其平均数量提高也是有限的。
综上所述,现有星敏感器所能达到的最高精度水平仍为分秒(0.1〞)量级,现有原理下的星敏感器,在合理有限长度和口径约束下其太阳杂光抑制角设计能力为30°左右,出现性能阈滞效应,未来要在同尺寸同性能下获得20°左右的太阳杂光抑制能力,以便适应迎阳工况的科学测量数据获取,因此必须要原理创新。目前国际上星敏感器太阳抑制角,最好水平的设计一般是30°左右,这也可以说是受现有设计水平和材料工艺限制的一种性能阈滞效应。为保证跟踪仪正常工作,需要限定航天器轨道面与太阳在全周期内的位置关系,还要限定其在航天器上的安装位置和方位,对于一些复杂任务就很难找到合适的安装方式。而未来陆海空天广域运动载体对于消杂光能力有特殊要求,比如任务要求星敏感器迎着太阳方向工作,就要求太阳抑制角不大于25°,现有技术和原理则难以达到,必须突破现有原理的杂光抑制角性能阈滞效应。
现有原理下的星敏感器,各参数和技术指标之间存在此消彼长的固有制约关系,不能指标全优,一般只能依据这种制约关系取舍优化,要想获得全优的指标参数,突破这种制约关系,必须从原理创新。
现有原理下星敏感器的指向精度取决于单星定位精度和跟踪恒星数量的多少,采用多星平差提高精度就要增加导航星数量,而增加星数意味着视场增大或者探测灵敏度增加,受探测器尺寸限制,视场的增加则焦距将减小,所以又导致单像素精度降低,吃掉了多星平差带来的精度提高效果,因此需要在相互制约的各个参数之间做折中取舍。再比如,如果要提高单像素精度,同时又要采用更多导航星平差测量提高精度,则需要在探测器像素尺寸一定时增大视场、入瞳口径和增长焦距,重量体积则呈立方级数增大,星敏感器的体积重量必然庞大,探测器也需要大面阵,对精度和信息处理速率带来负面影响。指标之间存在相互制约,带来一系列难以克服的设计问题。如果要得到指标全优,以小视场小孔径和少量星数获得超高精度,同时又要保证很小的的太阳抑制角,必须从原理上加以突破。
现有原理下的陆海空领域白天用星敏感器,虽然原理和设计方法比较成熟,但是受大气辐透背景噪声影响,采用近红外(900nm-1700nm)谱段,仪器探测灵敏度较低,多是靠单星点定向导航,单星定向精度因阈滞效应难以提高,一般为几个角秒,要获得多星定向的精度提升效果,达到0.1〞量级的精度,必须从原理上创新。现有机载和弹载星敏感器大多是单星定向,主要因为大气背景下所能探测到的恒星一般必须是3等以上的亮星,而在天球中这样的亮星数量有限。机载星敏感器有的通过扫描的方法获得多星定向能力,然而数量仍然有限,不能采用多星平差方法提高定向精度,要想以单星的导航星获得多星的导航精度,需要打破常规,从新原理成像体制上突破。
现有透射式星敏感器光学系统由于透镜的热光学特性受到温度场的变化难以消除,通过光机结构热补偿的手段有限,在工作环境温度场变化时会引起成像星点的位置漂移,导致星敏感器光轴指向漂移。
以上种种问题对于星敏感器精度的进一步提高造成了障碍,使得目前国际上星敏感器的精度发展到0.1〞(1σ)附近停滞不前,出现了性能阈滞效应。
发明内容
本发明解决的技术问题是:克服现有技术的不足,提出一种亚孔径阵列干涉星敏感器,在同样尺寸和质量的情况下,该星敏感器能够实现极限精度从0.1〞量级向0.01〞量级的跨越,亚孔径阵列是指在星敏感器的光学系统的整孔径内有若干个直径小于整孔径的子孔径,且该若干个直径小于整孔径的子孔径按照光学设计的结果规律排列成阵列。
本发明的技术解决方案是:
一种亚孔径阵列干涉星敏感器,该星敏感器包括亚孔径阵列遮光罩、亚孔径阵列掩模板、干涉成像光学系统、热测控系统、光电阵列探测器、图像采集电路与信息处理电路和星点簇定位与星点簇图识别模块;
干涉成像光学系统是指星敏感器的光学系统的整孔径内有若干个直径小于整孔径的子孔径,且该若干个直径小于整孔径的子孔径排列成阵列,并通过该若干个子孔径形成的阵列对目标在成像面进行干涉成像;
所述的亚孔径阵列遮光罩是指由若干个遮光罩组成,这些遮光罩的排列方式为关于光轴对称,且这些遮光罩与干涉成像光学系统上的子孔径一一对应,亚孔径阵列遮光罩位于干涉成像光学系统的子孔径上;
所述的亚孔径阵列掩模板位于干涉成像光学系统的入瞳处,亚孔径阵列掩模板上带有若干个开孔,且该若干个开孔与干涉成像光学系统上的子孔径一一对应;
所述的热测控系统为基于光纤光栅传感的仪器整机嵌入式全场热测控系统,用于对星敏感器的整机温度场进行测量;
所述的光电阵列探测器用于感知目标成像,且当目标的亮度达到灵敏度时所成干涉图像的侧峰仍能够被感知;
所述的图像采集电路与信息处理电路用于对干涉成像的星图进行提取和匹配处理,还用于姿态计算与输出;
所述的星点簇定位与星点簇图识别模块用于对星点簇进行定位以及对星点簇构成的星图进行识别,星点簇为干涉成像光学系统对恒星所成的像,且该像是由一个主峰和若干个侧峰构成;
干涉成像光学系统上的子孔径的确定方法为:
接近无限远的目标点发出的光由掩模板的各个孔进入,呈多束成像光束分隔状态,经过干涉成像光学系统成像于焦平面,在焦平面上干涉成像为一个星点簇像斑,这个星点簇像斑的能量和形态分布是由点扩展函数确定的,点扩展函数为掩模板的亚孔径阵列瞳函数的振幅函数模的平方。以星点簇的侧峰数量、能量和空间分布的特定要求为约束条件,以子孔径面积总和对于整孔径面积的占空比最大为目标函数,按照光学设计的方法确定子孔径的初始大小和数量以及空间分布,运用光学系统设计软件进行计算得到星点簇的能量和空间分布,如果满足要求则得到子孔径的设计结果,如果不满足要求则进行迭代计算,直至满足要求。
根据星点簇的能量和空间分布的要求为:星点簇的主峰和侧峰以及相邻侧峰之间的最小距离应按照以下准则选取:包含能量峰的80%能量的外缘之间的最小距离不小于0个像素,优选范围在1~100像素之间。
n的取值为侧峰的能量不小于主峰能量的10%的所有侧峰和主峰的和;
星点簇的侧峰数量应大于2,优选数量在4~100之间;
所述的亚孔阵干涉成像星敏感器,采用干涉成像光学系统和位于该系统入瞳处的亚孔径阵列掩模板形成多孔径干涉成像体制,在亚孔径阵列的每个亚孔径上有各自的遮光罩,这些亚孔径遮光罩集成为亚孔径阵列遮光罩;采用基于光纤光栅温度传感的仪器整机嵌入式全场热测系统,在一条测量光纤上刻制多个光栅传感器,按照不同光学元件的贴附特点,制成环型或线型多点传感器,并将其嵌入到光学系统零件内部,实现光学系统内部和整机全场温度分布式测量;来自恒星光束通过多孔阵遮光罩和亚孔径阵列掩模板的各个通光亚孔径,进入干涉成像光学系统,在高灵敏度光电阵列探测器上干涉成像,形成主峰和若干侧峰以特定的分布准则构成的星点簇,本发明以星点簇的多个峰定位代替现有技术中的单星定位,以提高单颗恒星像在像面的定位精度,探测器的灵敏度应保证星敏感器星表中最低辐照度恒星的星点簇最弱的侧峰照度的可探测性。
星点簇定位是运用多孔径干涉成像原理,采用亚孔径掩模板和干涉成像光学系统,将每颗恒星目标都按照该光学系统点扩展函数的规律性在像面上干涉成像为多个能量峰的星点簇,通过多点定位平差提高单颗恒星在像面的定位精度的一种方法,干涉成像光学系统具有如下特征:其入瞳为实光瞳,在光学系统第一个光学面前方,优选距离为0~10mm,亚孔径掩模板的右侧面应位于干涉光学系统的入瞳上。
星点簇侧峰数量要求和各峰间距准则的实现是通过优化亚孔径阵列掩模板上的各个亚孔径直径和相互位置关系实现的,按照多孔径干涉成像原理,星点簇的构成与亚孔阵干涉成像光学系统的点扩展函数一一对应,而亚孔径掩模板上的亚孔径尺寸与分布与光学系统点扩展函数一一对应,因此通过选择亚孔径阵列掩模板的参数与布局即可实现符合以上准则的星点簇。
本发明的干涉成像星敏感器,恒星目标通过亚孔径阵列掩模板和干涉成像光学系统,成像在焦平面上,每一颗恒星的像是由多光束干涉在焦平面成像的一个星点簇,星点簇由中心主峰和若干侧峰构成,星点簇的侧峰数量、侧峰相对于主峰的分布、主峰和侧峰的能量和弥散直径分布,取决于亚孔径阵列掩模板和干涉成像光学系统的技术与性能参数;
通过上述的亚孔径阵列干涉星敏感器进行姿态测量的方法为:
来自某一目标恒星的光束首先通过亚孔径阵列遮光罩到达亚孔径阵列掩模板,被亚孔径阵列分割为多个亚孔径光束,通过亚孔径阵列掩模板的亚孔径阵列后进入干涉成像光学系统的第一光学面,多孔径光束分别通过干涉成像光学系统后,在其焦平面发生干涉成像,形成具有主峰和侧峰分离特征明显的彼此能量差别较小的多点构成的星点簇像,在干涉成像光学系统视场内每一个恒星目标都会形成同样点扩展函数的星点簇,整个视场捕获到的恒星图像构成了一张星点簇星图,由安置在像平面上的高灵敏度光电阵列探测器的光敏面所接收,通过图像采集电路与信息处理器电路获取并存储一幅目标的光电数字图像,并采用嵌入在存储器中的星点簇定位与星点簇图识别软件进行星点簇星图处理,得到星敏感器的姿态测量信息。
所述以亚孔阵干涉成像光学系统是一个以整孔径设计制作的完整光学系统,其入射光瞳是由诸多小于全孔径的亚孔径按照设定的空间布局排列而成为亚孔阵列,多个亚孔径均通过此完整光学系统分别对于目标成像,在像面发生干涉,形成由主峰和多个侧峰构成的星点簇。
该亚孔阵列所包含的所有亚孔径的大小、形状、位置都是以最优星点簇定位精度和最大的亚孔阵填充因子为目标,以星点簇的侧峰数量、能量和空间分布的特定要求和干涉成像光学系统的性能参数为约束条件优化得到的。以上优化过程不同于以往合成孔径望远镜设计优化技术。合成孔径望远镜设计优化是以最佳全空间频率覆盖的MTF和最小的填充因子为目标优化亚孔阵布局。合成孔径望远镜没有采用星点簇的概念,也未发现其对于定位精度的有利特征,仅追求点扩展函数集中和尖锐,追求成像MTF提高。其点扩展函数的主峰和侧峰之间距离的要求是越小越好,一般都小于1个像素,甚至重叠在一起。而本发明则提出星点簇概念,并利用星点簇提高星点定位精度,并提出了星点簇形态、能量分布、能量峰数量等特定要求。与合成孔径望远镜设计相比较,本发明没有尽可能拉宽亚孔径基线的设计目标,也没有满足MTF等成像质量要求的要求、没有保证成像质量前提下追求最小填充因子的设计要求。相反,本发明用于小入瞳光学系统,对于亚孔径基线没有尽量拉宽的要求,追求尽可能大的填充因子,对于星点簇的疏散度提出了要求。本发明与现有星敏感器技术不同之处在于,以所成的星点簇星图像代替了现有技术中的星点星图像,在信息获取和信息处理方法上与现有技术完全不同。本发明的最大优势是,利用星点簇所包含的多个星点在像面上定位比现有技术单个星点在像面上定位其精度可以大幅度提升。主要因为利用星点簇可以增加采样样本数量,按照精度理论,这样的结果使得星点簇的定位精度比单星点的定位精度提高到
所说的亚孔阵遮光罩是由很多亚孔径遮光罩组成的阵列,其数量与亚孔径的数量相当,这些阵列中的亚孔径遮光罩每一个都有一个中心对称轴,这些中心对称轴与干涉成像光学系统的光轴平行,每个亚孔径的目标光线入射端面和出射端面在一般情况下是平行的,当有意抑制某一特定方向的太阳或其它杂光时也可不平行,每个亚孔径遮光罩出射端面均位于干涉成像光学系统的入瞳面上,也允许距离该入瞳面前后有设定的较小距离,距离的大小取决于系统对于入射能量的允许损失量和亚孔径遮光罩的外形尺寸限制。亚孔径遮光罩的内部全部采用无光黑漆发黑并设置有当光环,所有挡光环的内径要保证不遮挡视场且留有安装误差下部遮挡视场,挡光环的外径大小取决于挡光环的宽度,挡光环的宽度取决于消杂光能力和设计方案。挡光环可以是通过连接件固定在亚孔径遮光罩的外壁筒内测,也可以采用机械加工用一块料直接一体加工出来。亚孔阵遮光罩可以设计制作成一体,也可以分若干段采用连接件固定连接起来。
亚孔径阵列掩模板处于干涉成像光学系统入瞳位置,也可以看作是光学系统的一部分。其位置并一定严格处于光学系统入瞳处,可以允许有设定的误差,其误差大小在工艺保证的范围内。在亚孔阵掩模板上开出多个孔,排成一定的阵列,开孔的大小和位置需要采用一种最佳星点簇能态分布优化方法得到。这种优化方法描述如下:接近无限远的目标点发出的光。由亚孔阵掩模板的诸孔进入,呈多束成像光束分隔状态,经过干涉成像光学系统成像于焦平面,在焦平面上干涉成像为一个像斑,这个像斑的能量和形态分布是由点扩展函数决定的,点扩展函数是由亚孔径掩模板的亚孔径大小和空间布局决定的,按照傅里叶光学理论,亚孔阵掩模板的亚孔径阵列就是一种瞳函数,其傅里叶变换为其振幅函数,振幅函数模的平方即为点扩展函数。多个亚孔径光束干涉成像的点扩展函形态是由多个峰构成,中央有一个主峰,周围有若干个侧峰,主峰的能量和侧峰的能量不同,主峰的能量一般比较大,侧峰的能量一般比较小,通过对瞳函数的变化优化,就能改变亚孔阵干涉光学系统的点扩展函数能态分布,也就是多峰能态在像面空间的分布,我们称多峰点扩展函数为星点簇。从星敏感器星点定位精度的角度,最佳星点簇的确定原则是:主峰和侧峰能量差别越小越好,侧峰越多越好,各个能量峰越独立越好,具体要求如上文所述,这种优化原则是现有干涉成像技术没有采用的,是以牺牲MTF和成像分辨率为代价获得星点簇的最佳定位精度。通过改变亚孔阵掩模板的亚孔径大小和位置空间布局,即改变干涉光学系统的瞳函数,即可得到最佳的星点簇。得到最佳星点簇,也就得到了亚孔阵掩模板的开孔大小、形状和位置。
干涉成像光学系统用于亚孔阵掩模板分割开的多孔径成像光束聚焦成像,在像面上发生多成像光束干涉,其入瞳附近安置亚孔径阵列掩模板。一般对于长焦距(对于星敏感器而言大于300mm左右)和小视场(对于星敏感器而言不超过5°圆视场)的设计指标采用反射式或者折射反射式光学系统,这个系统是一个完整的系统,主镜和次镜都是完整的,没有发生主镜和次镜的分割。对于中短焦距(对于星敏感器而言小于300mm)和中等视场以上(对于星敏感器而言大于5°圆视场)的设计指标,除了可以采用折反射系统和反射系统外,更多采用折射式光学系统,系统仍然是完整的系统,入瞳应覆盖亚孔阵最大的包络;
基于光纤光栅传感的仪器整机嵌入式全场热测控系统是用于仪器整机内外全局温度场测量,采用多根多测点光纤光栅温度传感器,每一根测量光纤上制作若干个具有光栅结构的敏感测量区域,该传感器嵌入到光学反射镜基体、光学透镜边缘预先挖制的沟槽中固定,同时穿越仪器结构并在结构上固定,光纤多测点温度传感器可以深入到整机光机电各个层面,获得全局温场测量立体测点网络,以便比较精确地建立整机温场模型,利用一根多测点光纤可以提高效率并节省光纤传感器系统资源。测温点的数量确定和各测温点位置选择原则是:保证全局温场建模精度为优于0.5℃。
高灵敏度光电阵列探测器是由两种实现方式:一是单独的高灵敏度可见光或者近红外光电探测器,如EMCCD、sCMOS器件或者InGaAs。二是采用像增强器与高灵敏度探测器结合形成增强型高灵敏度光电探测器,如像增强器与sCMOS结合的IsCMOS、近红外像增强器与InGaAs结合的IInGaAs等。第一种方式用于探测器噪声非常低(几个电子)、探测灵敏度非常高(几个光子)和量子效率高于50%的情况。第二种方式用于比第一种情况有更高的灵敏度需求的情况。
图像采集电路与信息处理器电路是用于50Hz~100Hz以上图像采集能力的探测器图像采集电路与信息处理器电路组成的仪器电子学系统。为了满足星点簇星图的完整捕获,实现星点簇的主峰和侧峰清晰采样,并覆盖所有规定的星等范围,需要采用高动态高灵敏度的光电阵列探测器。同时,为了提高星点定位精度,本发明提出了多帧图像回归定位的时间性滤波和星点簇多峰定位空间性滤波双降噪方法,即:采用三轴的微小型陀螺指示星敏感器的三轴运动瞬时角速率,按照三轴瞬时角速率和焦距值可以计算相邻两帧图像星点在像面的移动量,可以将移动后的图像回归到初始图像上,进行多帧图像回归的时间性滤波降噪声定位。每帧图像又采用多峰星点簇空间性滤波定位,二者精度提升率具有相乘特性,大幅度提升了星敏感器的星点定位方法。实现这种方法的前提是采用高数据更新率的信息处理器,例如不小于50Hz~100Hz的高数据更新率。
星点簇定位与星点簇图识别软件是用于对干涉成像光学系统对恒星目标所成的星点簇星图图像进行星点簇的识别和定位,进而进行星图识别与定位的软件,而现有技术的算法均是对于星点星图而设计的,不适用于本发明。现有技术采用普通光学系统,得到的星图是星点星图,即一颗恒星对应一个星点像斑,而本发明提出采用的亚孔阵干涉成像光学系统,得到的星图星点簇星图,即一颗恒星对应n个星点构成的星点簇。n的大小是随着亚孔阵掩模板构建的瞳函数而变化,在不同瞳函数下,n可以得到特定的数目,随着瞳函数的变化,理论上n可以得到正整数集合,但是实际应用中考虑到n的增大会带来单个星点的能量减小,因此会折中选取n的数量,例如可以选择n=5、6、7、……、100。
本发明的方案不仅适用于星敏感器提高精度,用途十分广泛,适用于一切点目标或者接近于点目标的成像定位,以提高定位精度。如太阳敏感器、稀少导航星星敏感器、激光通讯瞄准或对准成像、目标监视跟踪定位、成点状图像的目标动态静态定位等各种应用场合。凡采用干涉成像星点簇定位的成像定位方法均属于本专利保护范畴。
本发明与现有技术相比的有益效果是:
(1)本发明运用多孔径干涉成像获得具有相当扩展度的星点簇,创造多点复用平差方法的运用条件,提高目标恒星的定位精度。
(2)本发明提出的亚孔阵干涉星敏感器采用一种新成像体制,使一颗恒星所成的像转化为一个包含多个星点的星点簇,增加了星点定位的采样样本数量,按照精度理论的误差统计原理,可以降低随机误差为现有技术单星点的
(3)现有星敏感器设计理论中,计算光轴指向精度的公式是:
ξ
通过成像系统测量出一颗已知恒星的方向矢量也就意味着确定了仪器光轴的指向矢量,运用精度理论,把对每颗恒星的测量作为一个独立的随机事件,如果成像系统摄取N颗恒星就产生N个星点像,就会得到N个观测矢量,它们均可以反算出光轴的指向矢量,这就相当于N次独立的观测测量随机事件,通常每次观测误差呈正态分布,则N次观测均方误差是单次观测的
因此单星点定位得到了多星点定位精度,新的计算方法发明公式为:
(4)本发明的光轴定位精度提高为现有技术水平的
(5)本发明针对亚孔阵干涉成像星点簇的主瓣旁瓣能量差异和亮弱星等能量差异所导致的导航星像迹混叠用现有算法难以提取的问题,提出了像增强超高探测灵敏度的星图获取方案,利用感受野神经网络快速粗定位与对称空间变换网络精定位结合运用突破星点簇提取定位新方法,通过感受野神经网络训练星点簇空间能量形态分布模型分层查询不同星等星点簇位置的方法,实现各个能量层级星点簇粗定位和混叠像迹辨识确认,再通过对称空间变换网络准确定位星点簇,用星点簇空间性滤波和多帧时间性滤波乘性双滤波降噪方法计算星点簇的坐标位置,为星图匹配识别提供唯一精准的导航星图。对于单星定位精度的提升本发明还采用了一种由三轴MEMS陀螺角速率指引的多帧图像回归重采样滤波去除随机噪声的提升精度的方法,这种方法本质上是利用了恒星成像的单星点在时间序列的噪声平差作用,以多帧图像回归重叠滤波方法降低定位误差,我们成为时间性滤波降噪。这种方法是在星点簇多点滤波降噪方法基础上采用,所以具有乘性提升精度的作用。在星点簇空间性滤波降噪基础上进行多帧图像时间性滤波降噪,我们称为空间性和时间性乘性滤波双降噪的方法。
(6)本发明打破现有星光跟踪仪基于几何光学成像系统的恒星和星像点一一对应的普通共轭成像原理模式,提出一种多孔径干涉成像的恒星和星点簇一多对应的新体制星图获取与定位识别模式,通过将多孔径干涉成像结构的异构优化使多峰点扩展函数延展为星点簇的新原理,建立了星点簇最佳构型评价与优化方法,解决了现有星光跟踪仪固有随机误差造成的性能阈滞效应这一难题。
(7)本发明打破了现有星光跟踪仪技术中对于高频误差和低频误差固有性的认识,提出了星点簇的引入对高频和低频误差源消除机理,得到星点簇最佳的瓣数和能态分布成像模式,通过瞳函数的异构优化和星光跟踪仪高低频误差的仿真迭代验证方法,研究星点簇机制对于星光跟踪仪误差源消减作用,找到星点簇位置提取精度最佳的能态分布模型,从而达到精度跨量级的提升效果,得到亚孔阵星光跟踪仪的新原理可行性。
(8)本发明针对现有技术基于普通共轭成像体制的仪器优化设计与评价方法带来的性能阈滞效应不能突破问题,提出了一种以最优精度星点簇能态分布和亚孔阵最大填充因子为目标函数的新体制仪器多学科优化设计与评价方法,解决光瞳函数最佳分布、遮光罩尺寸缩短、太阳抑制角缩小、星点定位精度提升、星点簇星图识别与匹配、高动态探测与电路噪声抑制、温致光轴漂移、陆海空天环境适应性等设计问题,提高仪器技术特性、通用性、鲁棒性和适用性,可达到0.01〞的光轴指向精度、20°太阳抑制角,为干涉成像星光跟踪仪乃至泛点类目标识别跟踪科学仪器的精度和其它性能提升提供新方法。
(9)本发明针对现有大尺寸望远镜多孔径干涉成像系统成像结构主镜分割配准装调的倾斜与活塞误差难以消除的问题,提出了亚孔径阵列遮光罩的共主次镜多孔径干涉成像新系统,创立了亚孔径掩模板与完整主镜结合的多孔径干涉成像模式,通过入瞳孔径掩模板和子孔径遮光罩结合进行瞳函数优化的新方法,解决了现有多孔径合成技术中主镜分割配准活塞与倾斜两类误差难题,使得斐索型多孔径干涉星光跟踪仪子孔径之间配准误差为零,开创了多孔径合成干涉成像在跟踪仪器类小尺寸光学系统应用的先例,通过子孔径的小尺寸缩短遮光罩长度至100mm以内,拓展了超高精度星光跟踪仪在机载等有限空间环境安装的可能性。
(10)本发明针对现有技术星光跟踪仪热致光轴漂移在十分秒量级无法进一步消除的阈滞效应问题,提出一种光纤光栅测温传感器与光学零件融合的嵌入式全局温场测控补偿方法,解决了现有技术没有手段测量光学系统零件内部温场导致热致光轴漂移无法实时测控补偿的问题,提出了热致漂移补偿模型,使得补偿后的光轴漂移角降到0.01〞量级,为长期凝视目标观测与跟踪瞄准科学任务的实现提供了保障,使深空导航和地球轨道卫星自主导航的位置精度有100m量级提高到10m以内。
(11)本发明可以扩展应用于其它1°以内小视角目标成像定位的场合。
附图说明
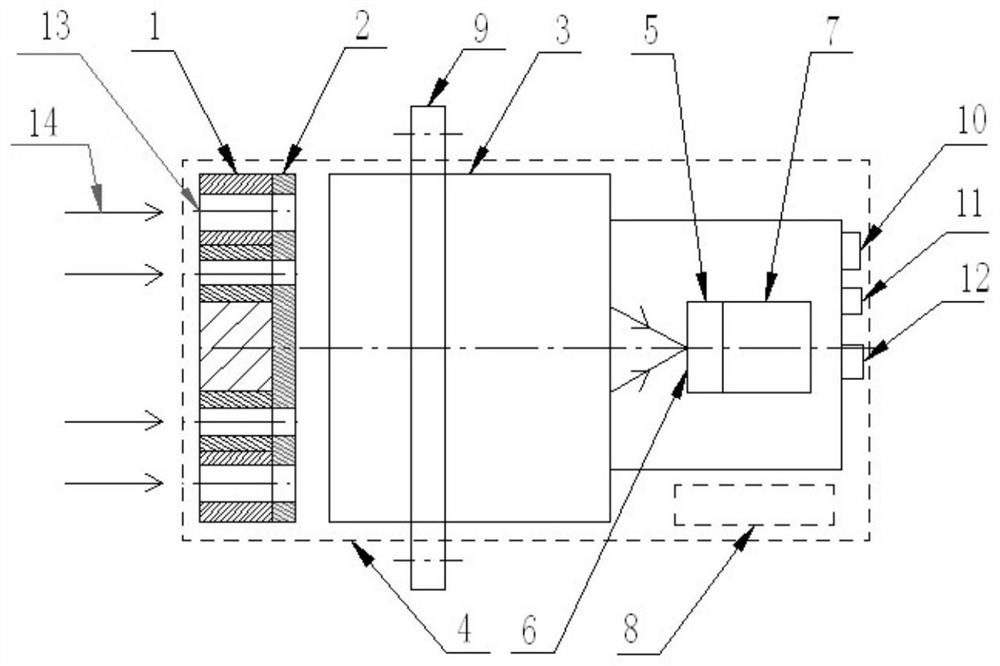
图1为本发明亚孔阵干涉星敏感器的构成示意图;
图2为本发明的亚孔径成型示意图;
图3为本发明的亚孔径阵列示意图;
图4为一维扩展函数示意图;
图5为二位点扩展函数。
具体实施方式
如图1-2所示,本发明提出了一种亚孔径阵列干涉星敏感器,包括亚孔径阵列遮光罩1、亚孔径阵列掩模板2、干涉成像光学系统3、基于光纤光栅传感的仪器整机嵌入式全场热测控系统4、高灵敏度光电阵列探测器5、探测器光敏面6、图像采集电路与信息处理器电路7、星点簇定位与星点簇图识别软件8、机械安装接口9、电源接口10、通信接口11、检测接口12。来自某一目标恒星的光束首先通过亚孔径阵列遮光罩1到达亚孔径阵列掩模板2,被其亚孔径阵列13分割为多个亚孔径光束14,通过亚孔径阵列掩模板2的亚孔径阵列后进入干涉成像光学系统3的第一光学面,多孔径光束分别通过干涉成像光学系统3后,在其焦平面发生干涉成像,形成具有主峰和侧峰分离特征明显的彼此能量差别较小的多点构成的星点簇像,在干涉成像光学系统3视场内每一个恒星目标都会形成同样点扩展函数的星点簇,整个视场捕获到的恒星图像构成了一张星点簇星图,由安置在像平面上的高灵敏度光电阵列探测器5的光敏面6所接收,通过图像采集电路与信息处理器电路7获取并存储一幅目标的光电数字图像,并采用嵌入在7存储器中的星点簇定位与星点簇图识别软件8进行星点簇星图处理,得到星敏感器的姿态测量信息。
下面结合附图及实施例对本发明进行进一步说明。
实施例
遮光罩的按照亚孔径掩模板的亚孔径阵列位置和开口大小制作,保证每一个亚孔径全视场入射光束都无渐晕或者少量渐晕(例如30%以下),并且每一个亚遮光罩内径挡板高度要比最大视场包络低0.5mm,以适应遮光罩安装的公差,每一个亚遮光罩入口尺寸按照视场角和公差要求确定,每个亚遮光罩的长度按照保证消杂光性能的前提下最短为原则设计。干涉成像光学系统3采用折反射光学系统,设计指标为:焦距300mm,入瞳位于亚孔阵掩模板出光面上,设计口径为100mm,视场角为圆锥视场2.2°,中心遮拦不超过30mm直径的圆盘。设计成像质量达到接近衍射极限水平。亚孔径阵列掩模板是一个平板零件,形状随着设计可以为圆形,也可以为其它形状,其外径尺寸与设计入瞳直径一样,为100mm,掩模板上挖制出若干孔,本案例为内外两同心圆阵列分布的不同尺寸的圆孔,第一环上为Φ10mm的圆孔8个,第二环上为它作为Φ6mm的圆孔8个,亚孔阵掩模板即为亚孔阵干涉光学系统3的入射光瞳。
由以上干涉光学系统对于恒星成像的扩展函数可以采用光学设计软件设计出来,本案例采用ZEMAX软件进行设计,得到的一维和二位点扩展函数如图4和图5所示。
由图4可见,在一个维度上可以得到至少7个可以提取的峰,包括1个主峰和6个侧峰。从图5上可见,按照图3亚孔径阵列布局的干涉光学系统,可以得到16个方向的一维分布,如此可以得到至少112个侧峰,按照发明公式计算,在不增加体积重量的条件下,本发明比现有技术可以提高10倍的精度。
本案例采用的是折反射式光学系统,也可以采用其它型式的光学系统,如反射式和透射式等,通过亚孔阵掩模板的孔径优化,都可以得到所需要的最佳星点簇,实现精度的
光纤光栅测温传感器与光学零件融合的嵌入式全局温场测控补偿方法的实施,主要解决光学系统零件内部温场导致热致光轴漂移无法实时测控补偿的问题,反射镜光学零件的光纤传感器安装方式为沟槽下入。
以最佳星点簇为目标的亚孔阵布局优化方法的实施方案,主要是通过亚孔阵掩模板的亚孔阵布局变化得到不同的星点簇能量和形态分布,通过星点簇的定位算法计算定位精度,达到预期精度的布局即是设计结果。
以往星光定向仪采用普通几何光学共轭单孔径成像系统,目标恒星成像为一个星点像,星点定位精度的提升潜力早已开发殆尽,形成了行业的共识,突破不了精度阈滞效应,星点提取精度一般停留在0.1像素水平无法突破。本项目有学者提出采用高速摄影多幅图叠加,运用时间性随机误差滤波,消除均匀随机噪声,可达到0.01像素水平,但是需要浪费处理时间和图像资源。本项目采用亚孔径阵列干涉成像新体制,通过亚孔阵干涉成像系统设计和最佳星点簇瞳函数优化,将单星点空间延展为多峰星点簇,运用空间性滤波,去除随机误差,仅一幅图就可以得到优于0.02像素的星点定位精度。再采用100Hz数据更新率连续多幅图叠加,运用时间性滤波,消除均匀随机噪声,精度再提高10倍,可达到优于0.002像素的星点定位精度,在现有技术的体积重量和焦距下,实现0.001〞量级单星定位精度。
本案例高灵敏度光电阵列探测器5是由两种类型实现:一是针对可见光恒星目标的高灵敏度光电探测器EMCCD,另一是针对近红外900nm-1700nm谱段的恒星目标的高灵敏度光电探测器InGaAs。
图像采集电路与信息处理器电路7是用于100Hz以上图像采集能力的探测器图像采集电路与信息处理器电路组成的仪器电子学系统。
- 一种亚孔径阵列干涉星敏感器
- 一种宽光谱大孔径星敏感器光学系统