一种光纤陀螺优化精测精度的闭环检测方法
文献发布时间:2023-06-19 11:44:10
技术领域
本发明属于光纤陀螺技术领域,涉及一种光纤陀螺优化精测精度的闭环检测方法。
背景技术
光纤陀螺是基于光学Sagnac效应的角速度传感器,它的发展日新月异,以结构简单、体积小、灵敏度高、功耗低等优点而备受各国的关注和重视,其也在各个领域都有着广泛的发展前景。但集成光学相位调制器增益漂移问题的存在也会影响光纤陀螺的精度,从而限制光纤陀螺的工程化应用。
在现有技术中,采用第二闭环系统的跟踪系统来自动调整集成光学相位调制器的增益,采用传统的方波调制检测时,第二闭环的闭环周期取决于主闭环反馈相位斜坡的复位,这种方法的效率较低;采用四态调制的方法虽然可以使第二个闭环周期恒定,不受反馈相位斜坡复位的影响,但两个闭环误差的交叉耦合会降低光纤陀螺的精度,特别是在实际应用中,光纤陀螺主闭环误差是对干扰和噪声敏感的微弱信号,使得光纤陀螺检测精度难以提高。
发明内容
为了抑制基于四态调制的光纤陀螺的两闭环交叉耦合,优化光纤陀螺的精测精度,满足高精度和高动态要求,本发明建立了采用四态调制方式的光纤陀螺主闭环系统的干扰和噪声模型,提出了保证系统指数稳定性和H
本发明为了抑制两闭环交叉耦合,优化光纤陀螺的精测精度,满足高精度和高动态要求,本发明采用四态调制方式的光纤陀螺主闭环系统的干扰和噪声模型,提出了保证系统指数稳定性和H
针对影响光纤陀螺精度的关键因素,本发明首先建立了基于四态调制的光纤陀螺系统的数学模型。四态调制的调制相位依次为
由于实际环境温度不断变化,集成光学相位调制器随温度的增益漂移导致2π电压U
根据本发明的实施例,光纤陀螺跟踪角速度变化的主闭环数学模型的建立和分析如下。由于存在光学噪声或系统输入的变化,一个调制周期内的主闭环误差不能被认为是相同的。然后在一个调制周期内,四种状态下的跟踪角速度的主闭环误差的平均值可以分别表示为
应当注意,
其中v是主要由光纤陀螺中的高斯白噪声引起的主闭环误差的变化幅度,
由于温度的变化和外界的干扰环境,集成光学相位调制器的调制增益的跟踪系统闭环误差影响光纤陀螺的主闭环。
通过将解调后的主闭环误差代入主闭环系统,并假设(1+Δk
其中z(k)∈R
在光纤陀螺主闭环系统中,输入信号
z(k+1)=Az(k)+(B+ΔB)sin(k
基于上述理论分析,可以得出光纤陀螺闭环系统是一个参数不确定的噪声扰动随机系统。集成光学相位调制器的跟踪误差因子μ
进一步分析闭环状态变量的方差与光纤陀螺检测精度之间的关系。由于许多性能指标可以用系统状态方程的方差来表示,如H
其中k
为了实现指数稳定性为了得到主要结果,首先给出以下定义。
定义1如果存在常量α>0和0<β<1,则当w(k)=0时,系统(3)被认为是均方指数稳定的,使得系统(3)的解z(k)满足
定义2如果系统(3)是指数稳定的,并且不等式
本发明首先用基于李雅普诺夫的方法考虑系统(3)的指数稳定性,w(k)=0。下面提供了一个充分条件来保证与噪声v(k)相关的光纤陀螺是均方指数稳定的,以便通过设计控制器来获得快速跟踪性能。
定理1如果存在对称正定矩阵X∈R
其中,
l
证明:考虑以下性能Γk=z
其中ξ
根据前面的分析,等式(5)保证
设k→∞,计算公式(6)的两边从k=k
定理1为具有不确定性的噪声扰动光纤陀螺提供了控制器的设计准则,保证了减小动态误差的均方指数稳定性和优化检测精度的规定的H
基于以上分析,本发明的技术方案为:一种光纤陀螺优化精测精度的闭环检测方法,包括如下步骤:
步骤一、建立基于四态调制的光纤陀螺系统的数学模型;
步骤二、建立和分析主闭环数学模型;
步骤三、引入线性反馈控制器,建立系统动力学模型;
步骤四、设计优化光纤陀螺性能的控制器的反馈增益矩阵。
有益效果:
(1)本发明的研究结果可以提高光纤陀螺的精测精度,此方法不仅可以在工程应用中优化检测精度,而且对光纤陀螺的设计也有一定的参考价值。
(2)本发明提出了保证系统指数稳定性和H
附图说明
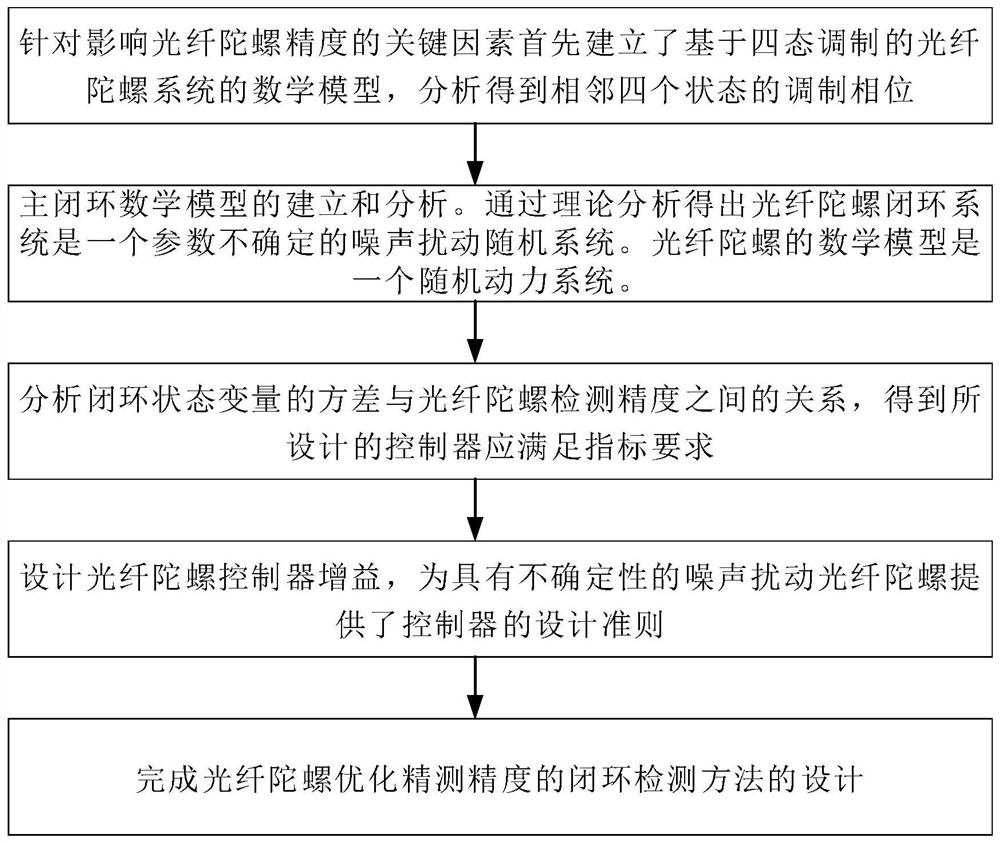
图1本发明光纤陀螺优化精测精度的闭环检测方法步骤流程图;
图2本发明光纤陀螺优化精测精度闭环系统检测方案;
图3采用光纤陀螺优化精测精度的闭环检测方法前0.01°/h的噪声带;
图4采用光纤陀螺优化精测精度的闭环检测方法后0.006°/h的噪声带。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅为本发明的一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域的普通技术人员在不付出创造性劳动的前提下所获得的所有其他实施例,都属于本发明的保护范围。
如图1所示,根据本发明的实施例,所述的一种光纤陀螺优化精测精度的闭环检测方法,具体包括如下步骤:
第一步,针对影响光纤陀螺精度的关键因素,首先建立基于四态调制的光纤陀螺系统的数学模型。
四态调制的调制相位依次为
集成光学相位调制器随外界温度变化的增益漂移导致2π电压U
第二步,主闭环数学模型的建立和分析。
由于存在光学噪声或系统输入的变化,一个调制周期内的主闭环误差不能被认为是相同的。主闭环误差
注意到主闭环误差的变化幅度
由于温度的变化和外界的干扰环境,集成光学相位调制器的调制增益的跟踪系统闭环误差影响光纤陀螺的主闭环。通过将解调后的主闭环误差代入主闭环系统,并假设(1+Δk
其中
第三步,引入线性反馈控制器,建立系统动力学模型。
在主闭环系统中,输入信号
v(k)是动态光纤陀螺固有的,与输入和光路误差无关,因此它可以被认为是高斯白噪声项,具有E v(k)=0,
基于上述理论分析得出光纤陀螺闭环系统是一个参数不确定的噪声扰动随机系统。集成光学相位调制器的跟踪误差因子μ
第四步,设计优化光纤陀螺性能的控制器的反馈增益矩阵K
进一步分析闭环状态变量的方差与光纤陀螺检测精度之间的关系。检测精度可以通过表达式
为了实现指数稳定性为了得到主要结果,首先给出了定义1和定义2。
用基于李雅普诺夫的方法考虑系统(3)的指数稳定性,w(k)=0。下面提供了一个充分条件来保证与噪声v(k)相关的光纤陀螺是均方指数稳定的,以便通过设计控制器来获得快速跟踪性能。
定理1如果存在对称正定矩阵X∈R
定理1为具有不确定性的噪声扰动光纤陀螺提供了控制器的设计准则,保证了减小动态误差的均方指数稳定性和优化检测精度的规定的H
以下给出本发明所求得的一个反馈增益矩阵。求该问题的最小值γ
为了验证所设计的控制算法的有效性,利用平台通过实验对其进行测试验证。通过图3和图4可以看到采用优化控制算法能够优化光纤陀螺的精测精度。因此该方案可以有效地抑制对光学陀螺的影响。实验结果还验证了相位调制器调制增益检测技术可以应用于光纤陀螺闭环检测系统,以实现实际工程中的高精度光纤陀螺,验证了优化后控制算法的有效性和有用性。
尽管上面对本发明说明性的具体实施方式进行了描述,以便于本技术领域的技术人员理解本发明,且应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
- 一种光纤陀螺优化精测精度的闭环检测方法
- 一种电路方案的高精度闭环光纤陀螺光源相对强度噪声抑制方法