适应型巡检机器人
文献发布时间:2023-06-19 11:45:49
技术领域
本发明属于工业机器人领域的一种电路巡检机器人,具体涉及了一种适应型巡检机器人。
背景技术
随着社会的发展,各行各业对电力的依赖程度越来越大,电力稳定性是很必要的,而输电线路作为电力系统的动脉,需要投入很多人力物力去开展电路巡检工作,人工巡检需要很多时间,而且安全性得不到保障。
发明内容
针对人工巡检难度系数大的问题,本发明提供了一种适应型巡检机器人,实现对输电线路的巡检。
本发明包括装置提升机构、多个单臂运动机构和主体连杆传动机构;
主体连杆传动机构固定安装在装置提升机构中,多个单臂运动机构分别安装在主体连杆传动机构中,多个单臂运动机构与线缆相连,主体连杆传动机构的驱动,带动多个单臂运动机构沿着输电线路进行巡检。
所述的装置提升机构包括把手、工字型连接架、电缆限位杆、横板、n型支架、巡检装置支撑限位架、连接板和万向轮;
工字型连接架水平设置,多个所述的把手分别固定安装在工字型连接架的两个端面上;多个所述的电缆限位杆分别通过焊接方式固定安装在工字型连接架两端的侧面,电缆限位杆弯折设置形成用于嵌装穿过电缆的凹槽;所述的n型支架的顶面通过横板固定安装在工字型连接架一端的底面,
n型支架两个侧面底部分别焊接有巡检装置支撑限位架,每个巡检装置支撑限位架靠近工字型连接架另一端的底面通过万向轮连接板固定安装有万向轮,
所述的装置提升机构的两侧对称布置,工字型连接架和巡检装置支撑限位架之间设置有主体连杆传动机构,每个巡检装置支撑限位架的上端面设置有限位条形槽,主体连杆传动机构嵌装在巡检装置支撑限位架的限位条形槽中并沿限位条形槽水平移动。
每个所述的单臂运动机构结构相同,具体为:
包括滚轮、第一轴承座、第一光轴、轴承支座、第一联轴器、直流电机、直流电机支座和单臂支撑杆;
单臂支撑杆的上端固定安装有轴承支座,第一轴承座与轴承支座固定连接,单臂支撑杆的上端设置有滚轮,滚轮与第一光轴的一端同轴固定连接,第一光轴的另一端穿过第一轴承座后与第一联轴器的一端同轴固连,第一联轴器的另一端与直流电机的输出轴同轴固连,直流电机通过直流电机支座固定安装在单臂支撑杆上单臂支撑杆的下端与主体连杆传动机构连接。
所述的主体连杆传动机构包括主体支撑板、步进电机、步进电机支座、第二联轴器、第二光轴、中心法兰盘、第一转动副支撑部件、中心大连杆、巡检装置支撑板和两个单臂传动模块;
主体支撑板通过巡检装置支撑板嵌装在装置提升机构,步进电机通过步进电机支座固定安装在主体支撑板的上端面中部,步进电机的输出轴朝下通过第二联轴器与第二光轴的一端同轴固连,第二光轴的另一端穿过主体支撑板与中心法兰盘同轴固定连接,
中心法兰盘的底面设置有两个关于中心对称的第一转动副支撑部件;一个第一转动副支撑部件通过一根中心大连杆与一个单臂传动模块相连,另一个第一转动副支撑部件通过另一根中心大连杆与另一个单臂传动模块相连;
两个单臂传动模块安装在主体支撑板的两侧并且关于主体支撑板的中心对称布置,两个单臂传动模块的中心的连线与巡检方向平行,两个单臂传动模块结构相同,具体为:
包括第二转动副支撑部件、传动法兰盘、紧定螺钉、传动法兰盘支撑吊板、第二推力球轴承、传动端连接连杆、单臂端连接连杆、第三转动副支撑部件、销轴、第四转动副支撑部件、第三光轴、第二轴承座和单臂固定板;
主体支撑板中的两角分别固定安装有一个单臂固定板,每个单臂固定板通过第二轴承座和第三光轴与一个单臂运动机构铰接,每个单臂运动机构的下端面安装有第四转动副支撑部件;
两个单臂固定板之间的主体支撑板下端面中间设置有一个传动法兰盘,传动法兰盘支撑吊板固定安装在主体支撑板的上端面,传动法兰盘支撑吊板内部通过紧定螺钉活动安装有第二推力球轴承,每个传动法兰盘的中心轴均穿过主体支撑板与对应的第二推力球轴承同轴连接形成转动副;
传动法兰盘的下端面固定安装两个第三转动副支撑部件;两个第三转动副支撑部件分别位于传动法兰盘对称的两处,第二转动副支撑部件固定安装在两个第三转动副支撑部件连线的一侧的传动法兰盘下端面上,靠近第三转动副支撑部件传动法兰盘的下端面设置有凸起缘;
传动法兰盘与两根传动端连接连杆相连,一根传动端连接连杆的一端与一个第三转动副支撑部件铰接形成第一连接连杆传动副,一根传动端连接连杆的另一端通过销轴与一个单臂端连接连杆的一端铰接,一个单臂端连接连杆的另一端与一个第四转动副支撑部件铰接形成第二连接连杆传动副;
另一根传动端连接连杆的一端与另一个第三转动副支撑部件铰接形成第一连接连杆传动副,另一根传动端连接连杆的另一端通过销轴与另一个单臂端连接连杆的一端铰接,另一个单臂端连接连杆的另一端与另一个第四转动副支撑部件铰接形成第二连接连杆传动副;传动端连接连杆沿凸起缘旋转运动;
中心大连杆的一端与第一转动副支撑部件铰接形成第一大连杆传动副,中心大连杆的另一端与第二转动副支撑部件铰接形成第二大连杆传动副。
两根所述中心大连杆之间关于主体支撑板的中心对称布置。
安装有步进电机支座的所述主体支撑板正下方设置有中心法兰盘支撑底板,中心法兰盘支撑底板上固定安装有摄像头,中心法兰盘和中心法兰盘支撑底板之间安装有第一推力球轴承,主体支撑板两侧分别通过一块中心法兰盘支撑侧板与中心法兰盘支撑底板两侧固定连接。
本发明的有益效果是:
1、本发明能实现电力输电线路的高效巡检,大大减轻了人力劳动,增加安全性;
2、本发明机器体积小,方便携带,作业空间适应型强;
附图说明
图1为本发明的一个侧视立体图;
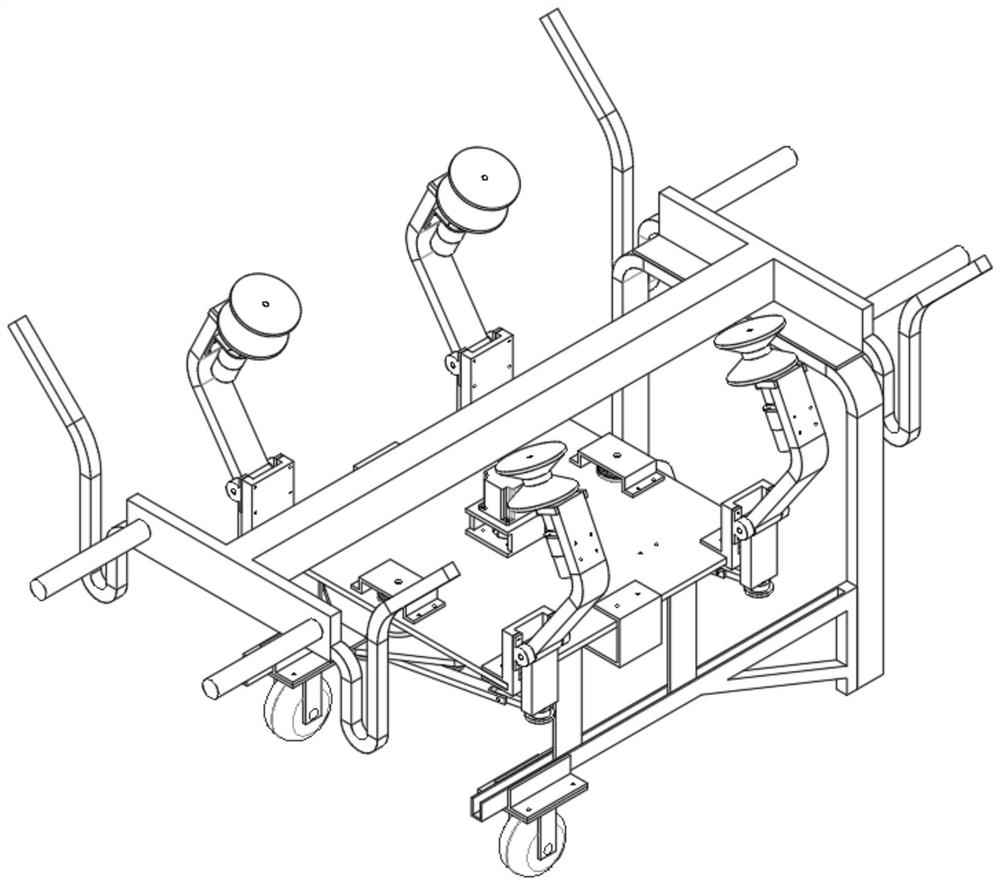
图2为本发明的轴侧立体图;
图3为本发明中装置提升机构的结构立体图;
图4为本发明中单臂运动机构的结构立体图;
图5-1为本发明中主体连杆传动机构的结构立体图一;
图5-2为本发明中主体连杆传动机构的结构立体图二;
图5-3为本发明中主体连杆传动机构的结构立体图三;
图5-4为本发明中主体连杆传动机构的结构立体图四;
图6为本发明的工作过程示意图。
图中:把手1.1、工字型连接架1.2、电缆限位杆1.3、横板1.4、n型支架1.5、巡检装置支撑限位架1.6、万向轮连接板1.7、万向轮1.8、滚轮2.1、第一轴承座2.2、第一光轴2.3、轴承支座2.4、第一联轴器2.5、直流电机2.6、直流电机支座2.7、单臂支撑杆2.8、主体支撑板3.1、步进电机3.2、步进电机支座3.3、第二联轴器3.4、第二光轴3.5、中心法兰盘3.6、中心法兰盘支撑侧板3.7、中心法兰盘支撑底板3.8、第一推力球轴承3.9、第一转动副支撑部件3.10、中心大连杆3.11、第二转动副支撑部件3.12、传动法兰盘3.13、螺钉3.14、传动法兰盘支撑吊板3.15、第二推力球轴承3.16、传动端连接连杆3.17、单臂端连接连杆3.18、第三转动副支撑部件3.19、巡检装置支撑板3.20、摄像头3.21、销轴3.22、第四转动副支撑部件3.23、第三光轴3.24、第二轴承座3.25、单臂固定板3.26。
具体实施方式
下面结合附图及实施例对本发明作进一步说明。
如图1和2所示,本发明包括装置提升机构、多个单臂运动机构和主体连杆传动机构;
主体连杆传动机构固定安装在装置提升机构中,多个单臂运动机构分别安装在主体连杆传动机构中,多个单臂运动机构的滚轮2.1与线缆相连,主体连杆传动机构的驱动,带动多个单臂运动机构沿着输电线路进行巡检。
如图3所示,装置提升机构包括把手1.1、工字型连接架1.2、电缆限位杆1.3、横板1.4、n型支架1.5、巡检装置支撑限位架1.6、连接板1.7和万向轮1.8;
工字型连接架1.2水平设置,多个把手1.1分别通过螺栓固定安装在工字型连接架1.2的两个端面上;多个电缆限位杆1.3分别通过焊接方式固定安装在工字型连接架1.2两端的侧面,电缆限位杆1.3弯折设置形成用于嵌装穿过电缆的凹槽;电缆限位杆1.3向上布置,用于对电缆的限位;n型支架1.5的顶面通过横板1.4固定安装在工字型连接架1.2一端的底面,横板1.4通过焊接方式固定安装在工字型连接架1.2一端的底面,n型支架1.5的顶面通过螺栓与横版1.4固定连接,n型支架1.5与工字型连接架1.2垂直布置;
n型支架1.5靠近工字型连接架1.2另一端的两个侧面底部分别焊接有巡检装置支撑限位架1.6,巡检装置支撑限位架1.6设置在工字型连接架1.2的下方每个巡检装置支撑限位架1.6靠近工字型连接架1.2另一端的底面通过万向轮连接板1.7固定安装有万向轮1.8,万向轮连接板1.7通过焊接方式与巡检装置支撑限位架1.6固定;万向轮1.8通过螺栓与万向轮连接板1.7固定;万向轮1.8和n型支架1.5实现装置提升机构的水平放置,并且万向轮1.8还可以实现巡检装置的快速移动。
装置提升机构的两侧对称布置,工字型连接架1.2和巡检装置支撑限位架1.6之间设置有主体连杆传动机构,每个巡检装置支撑限位架1.6的上端面设置有限位条形槽,主体连杆传动机构嵌装在巡检装置支撑限位架1.6的限位条形槽中并沿限位条形槽水平移动。
如图4所示,每个单臂运动机构结构相同,具体为:
包括滚轮2.1、第一轴承座2.2、第一光轴2.3、轴承支座2.4、第一联轴器2.5、直流电机2.6、直流电机支座2.7和单臂支撑杆2.8;
单臂支撑杆2.8的上端通过螺栓固定安装有轴承支座2.4,第一轴承座2.2与轴承支座2.4通过螺栓固定连接,单臂支撑杆2.8的上端设置有滚轮2.1,滚轮2.1与第一光轴2.3的一端同轴固定连接,第一光轴2.3的另一端穿过第一轴承座2.2后与第一联轴器2.5的一端同轴固连,第一光轴2.3活动安装在第一轴承座2.2中,第一联轴器2.5的另一端与直流电机2.6的输出轴同轴固连,直流电机2.6通过直流电机支座2.7固定安装在单臂支撑杆2.8上,直流电机支座2.7通过螺栓与单臂支撑杆2.8固定连接;单臂支撑杆2.8的下端与主体连杆传动机构连接。
如图5-1、5-2、5-3和5-4所示,主体连杆传动机构包括主体支撑板3.1、步进电机3.2、步进电机支座3.3、第二联轴器3.4、第二光轴3.5、中心法兰盘3.6、第一转动副支撑部件3.10、中心大连杆3.11、巡检装置支撑板3.20和两个单臂传动模块;
主体支撑板3.1通过巡检装置支撑板3.20嵌装在装置提升机构的在巡检装置支撑限位架1.6的限位条形槽中,步进电机3.2通过步进电机支座3.3固定安装在主体支撑板3.1的上端面中部,步进电机3.2通过螺栓与步进电机支座3.3固定连接;步进电机支座3.3通过螺栓与主体支撑板3.1固定连接;步进电机3.2的输出轴朝下通过第二联轴器3.4与第二光轴3.5的一端同轴固连,第二联轴器3.4通过螺栓分别与步进电机3.2输出轴和第二光轴3.5的一端固定连接,第二光轴3.5的另一端穿过主体支撑板3.1与中心法兰盘3.6同轴固定连接,中心法兰盘3.6为圆形,中心法兰盘3.6通过紧定螺钉3.14与第二光轴3.5限位固定;
中心法兰盘3.6的底面设置有两个关于中心对称的第一转动副支撑部件3.10;安装有步进电机支座3.3的主体支撑板3.1正下方设置有中心法兰盘支撑底板3.8,中心法兰盘支撑底板3.8上固定安装有摄像头3.21,中心法兰盘3.6和中心法兰盘支撑底板3.8之间安装有第一推力球轴承3.9,使得中心法兰盘3.6和中心法兰盘支撑底板3.8之间通过第一推力球轴承3.9铰接可相对旋转,主体支撑板3.1上端面的两侧分别通过一块中心法兰盘支撑侧板3.7与中心法兰盘支撑底板3.8下端面的两侧固定连接;中心法兰盘支撑侧板3.7与主体支撑板3.1和中心法兰盘支撑底板3.8之间均通过螺栓进行连接;
一个第一转动副支撑部件3.10通过一根中心大连杆3.11与一个单臂传动模块相连,另一个第一转动副支撑部件3.10通过另一根中心大连杆3.11与另一个单臂传动模块相连;两根中心大连杆3.11之间关于主体支撑板3.1的中心对称布置。
两个单臂传动模块安装在主体支撑板3.1的两侧并且关于主体支撑板3.1的中心对称布置,两个单臂传动模块的中心的连线与巡检方向平行,两个单臂传动模块结构相同,具体为:
包括第二转动副支撑部件3.12、传动法兰盘3.13、紧定螺钉3.14、传动法兰盘支撑吊板3.15、第二推力球轴承3.16、传动端连接连杆3.17、单臂端连接连杆3.18、第三转动副支撑部件3.19、销轴3.22、第四转动副支撑部件3.23、第三光轴3.24、第二轴承座3.25和单臂固定板3.26;
主体支撑板3.1中的两角,即垂直于巡检方向的两个侧面的一侧分别固定安装有一个单臂固定板3.26,每个单臂固定板3.26通过第二轴承座3.25和第三光轴3.24与一个单臂运动机构的单臂支撑杆2.8铰接,每个单臂固定板3.26上固定安装有第二轴承座3.25,每个单臂运动机构的单臂支撑杆2.8的下部开有中心孔,第三光轴3.24的一端穿过中心孔后第三光轴3.24的两端通过紧定螺钉活动安装在第二轴承座3.25中,第三光轴3.24的两端通过紧定螺钉与第二轴承座3.25限位固定;每个单臂运动机构的单臂支撑杆2.8的下端面安装有第四转动副支撑部件3.23;
两个单臂固定板3.26之间的主体支撑板3.1下端面中间设置有一个传动法兰盘3.13,传动法兰盘支撑吊板3.15通过螺栓固定安装在主体支撑板3.1的上端面,传动法兰盘支撑吊板3.15内部通过紧定螺钉3.14活动安装有第二推力球轴承3.16,每个传动法兰盘3.13的中心轴均穿过主体支撑板3.1与对应的第二推力球轴承3.16同轴连接形成传动副;
传动法兰盘3.13的下端面固定安装两个第三转动副支撑部件3.19;两个第三转动副支撑部件3.19分别位于传动法兰盘3.13对称的两处,第二转动副支撑部件3.12固定安装在两个第三转动副支撑部件3.19连线的一侧的传动法兰盘3.13下端面上,靠近第三转动副支撑部件3.19传动法兰盘3.13的下端面设置有凸起缘;
传动法兰盘3.13与两根传动端连接连杆3.17相连,一根传动端连接连杆3.17的一端与一个第三转动副支撑部件3.19铰接形成第一连接连杆传动副,一根传动端连接连杆3.17的另一端通过销轴3.22与一个单臂端连接连杆3.18的一端铰接,一个单臂端连接连杆3.18的另一端与一个第四转动副支撑部件3.23铰接形成第二连接连杆传动副;
另一根传动端连接连杆3.17的一端与另一个第三转动副支撑部件3.19铰接形成第一连接连杆传动副,另一根传动端连接连杆3.17的另一端通过销轴3.22与另一个单臂端连接连杆3.18的一端铰接,另一个单臂端连接连杆3.18的另一端与另一个第四转动副支撑部件3.23铰接形成第二连接连杆传动副;传动端连接连杆3.17沿凸起缘旋转运动;
中心大连杆3.11的一端与第一转动副支撑部件3.10铰接形成第一大连杆传动副,中心大连杆3.11的另一端与第二转动副支撑部件3.12铰接形成第二大连杆传动副。
本发明的工作原理:
如图6所示,第一步,将巡检装置支撑板3.20放置在巡检装置支撑限位架1.6的限位条形槽上使得主体连杆传动机构安装在装置提升机构中,卷扬机吊起装置提升机构,待装置提升机构的电缆限位杆1.3接触到电缆时,卷扬机停止工作。
第二步,步进电机3.2启动,带动中心法兰盘3.6转动,带动第一大连杆传动副和第二大连杆传动副,从而带动第一连接连杆传动副和第额连接连杆传动副,从而使单臂运动机构绕第三光轴3.24转动,滚轮2.1与电缆相连。
第三步,四个直流电机2.6启动,带动滚轮2.1转动,使得滚轮2.1沿电缆方向运动,装置提升机构与主体连杆传动机构和单臂运动机构分离,同时摄像头3.21开启工作并进行画面的传送,从而可以进行设备的故障检查,实现巡检装置在电缆上的行走巡检。
第四步,巡检完毕后,主体连杆传动机构和单臂运动机构重新返回安装在装置提升机构,并整体返回至地面。
- 自适应线路线况的巡检机器人柔性动力机构和巡检机器人
- 自适应线路线况的巡检机器人柔性动力机构和巡检机器人