混合动力车辆、行驶控制系统和控制混合动力车辆的方法
文献发布时间:2023-06-19 11:47:31
技术领域
本公开涉及混合动力车辆、行驶控制系统和控制混合动力车辆的方法。
背景技术
混合动力车辆(HV)近年来越来越受欢迎。电气驱动车辆能够包括混合动力车辆、电动车辆(EV)等。典型的混合动力车辆针对每种功能配备有单独的电子控制单元(ECU)。例如,在日本未审查专利申请公开No.2019-156007(JP 2019-156007A)中公开的混合动力车辆包括发动机ECU、电动机ECU、电池ECU和HVECU。HVECU经由通信端口连接到发动机ECU、电动机ECU和电池ECU,并且向和从发动机ECU、电动机ECU和电池ECU发送和接收各种控制信号和数据。
发明内容
这里假设混合动力车辆配备有电池组和行驶控制系统。电池组中的ECU和行驶控制系统中的ECU被配置为彼此通信。
电池组包括电池并管理电池的状态。具体地,电池组中的ECU计算电池的可容许充电电力和电池的可容许放电电力,并将计算结果输出到行驶控制系统。
行驶控制系统包括发动机和两个旋转电机(电动机和发电机),并且通常控制混合动力车辆的行驶。具体地,行驶控制系统中的ECU基于从电池组中的ECU接收的关于电池的可容许充电电力和可容许放电电力的数据来控制发动机或控制该两个旋转电机。
汽车工业被认为具有垂直整合的工业结构。然而,由于混合动力车辆将在世界范围内变得越来越流行,因此汽车工业可能会越来越多地朝向横向专业化转变。本发明人关注于与工业结构的这种转变相关联的以下可能的问题。
可能存在电池组公司(以下称为公司A)和行驶控制系统公司(以下称为公司B)不同的情况。例如,公司B向公司A出售行驶控制系统。公司A使用从公司B购买的行驶控制系统和由公司A设计(采购)的电池组开发混合动力车辆。特别是在这种情况下,在电池组和行驶控制系统之间的兼容性可能是个问题。
将对此更具体地描述。如上所述,关于电池的可容许充电电力和可容许放电电力的数据从电池组中的ECU被发送到行驶控制系统中的ECU。例如,在公司A和公司B对通信的内容、定时等有不同的理解的情况下,或者在公司A和B之间在通信方面的协调不够的情况下,有可能与行驶控制系统期望的数据不同的数据作为关于电池的可容许充电电力和可容许放电电力的数据从电池组中的ECU被发送到行驶控制系统中的ECU。具体地,电池组中的ECU有可能将可容许充电电力和可容许放电电力设定为过小的值(例如,接近0的值)。在这种情况下,即使实际上仍不必要保护电池,行驶控制系统也可能减少电池的充电和放电。结果,混合动力车辆可能变得不能移动。
本公开提供了一种混合动力车辆、一种行驶控制系统,和一种控制混合动力车辆的方法,即使在两个ECU之间的通信出现问题时,其也能够使混合动力车辆移动。
根据本公开的第一方面的一种混合动力车辆包括:发动机;第一旋转电机;经由输出轴连接到驱动轮的第二旋转电机;行星齿轮组;电池;被配置为在电池、第一旋转电机和第二旋转电机之间转换电力的电力转换器;电气地连接在电池和电力转换器之间的继电器;和第一和第二控制器。行星齿轮组被配置为机械地耦合发动机、第一旋转电机和输出轴,并且被配置为在发动机、第一旋转电机和输出轴之间传递转矩。第一控制器被配置为计算电池的可容许充电电力和电池的可容许放电电力并输出计算结果。第二控制器被配置为根据从第一控制器接收的可容许充电电力和可容许放电电力来控制发动机和电力转换器。作为控制模式,第二控制器具有其中继电器闭合并且电池和电力转换器被电气地连接的正常模式,和其中继电器断开以使混合动力车辆在电池从电力转换器电气地断连的情况下移动的无电池行驶模式。第二控制器被配置为:当可容许充电电力的大小和可容许放电电力的大小中的至少一个变得小于第一预定值时选择无电池行驶模式。
在本公开的第一方面的混合动力车辆中,第二控制器可以被配置为:当可容许充电电力的大小和可容许放电电力的大小中的至少一个由于在第一控制器和第二控制器之间的通信问题而变得小于第一预定值时,选择无电池行驶模式。
根据本公开的第一方面的混合动力车辆,第二控制器从第一控制器接收电池的可容许充电电力和可容许放电电力。当在混合动力车辆的正常模式期间可容许充电电力的大小变得小于第一预定值或可容许放电电力的大小变得小于第一预定值时,第二控制器将混合动力车辆的控制模式切换为无电池行驶模式,无论该可容许充电电力大小或该可容许放电电力大小的减小是由于电池状态(例如,由于电池温度的过度升高或降低)还是由于在第一和第二控制器之间的通信。因此,即使在第一和第二控制器之间的通信存在问题时,也能够使混合动力车辆移动。
在本公开的第一方面的混合动力车辆中,第二控制器可以被配置为在满足以下所有条件时取消无电池行驶模式:(i)不再是可容许充电电力的大小和可容许放电电力的大小中的至少一个小于第一预定值的情况,(ii)混合动力车辆停止,并且(iii)混合动力车辆的加速器踏板未被操作。
当无电池行驶模式被取消时(例如,当混合动力车辆的控制模式被切换回正常模式时),继电器闭合并且电池和电力转换器被再次电气地连接。因此,期望避免在车辆移动时(或者当存在车辆可能移动的可能性时)取消无电池行驶模式。根据本公开的第一方面的混合动力车辆,第二控制器在确认混合动力车辆完全停止以及检查电力的大小之后取消无电池行驶模式。这种配置能够防止当例如混合动力车辆的控制模式被切换回正常模式时发生异常。
本公开的第一方面的混合动力车辆可以进一步包括:辅助负载;电气地连接在继电器和辅助负载之间的DC-DC转换器;和被配置为向辅助负载供应电力的辅助电池。第二控制器可以被配置为在正常模式期间执行DC-DC转换器的恒定电压控制。作为控制模式,第二控制器可以进一步具有其中第二控制器执行DC-DC转换器的恒定电力控制的恒定电力模式。第二控制器可以被配置为:当可容许充电电力的大小和可容许放电电力的大小中的至少一个变得小于第二预定值时,选择恒定电力模式,该第二预定值等于或大于第一预定值。
根据本公开的第一方面的混合动力车辆,第二控制器进一步具有其中第二控制器执行DC-DC转换器的恒定电力控制的恒定电力模式。如稍后详细描述地,通过选择恒定电力模式,辅助电池的电压可以随着辅助负载的电力消耗的波动而波动,但是电池的充电和放电电力随着辅助负载的电力的波动的变化减小。因此,其充电和放电由于可容许充电电力和可容许放电电力中的至少一个已经变得小于第二预定值而受到相对严格限制的电池能够更可靠地受到保护。
在本公开的第一方面的混合动力车辆中,第二控制器可以被配置为在正常模式期间通过调节发动机的转矩、第一旋转电机的转矩和第二旋转电机的转矩来保证从混合动力车辆输出的驱动力被控制为请求驱动力。作为控制模式,第二控制器可以进一步具有其中与在正常模式中相比第二控制器较不严格地保证驱动力被控制为请求驱动力的降低保证模式。第二控制器可以被配置为:当可容许充电电力的大小和可容许放电电力的大小中的至少一个变得小于第三预定值时,选择降低保证模式,该第三预定值等于或大于第一预定值。
根据本公开的第一方面的混合动力车辆,第二控制器进一步具有其中与在正常模式中相比第二控制器较不严格地保证请求驱动力的降低保证模式。如稍后详细描述地,通过选择降低保证模式,由于与发动机燃烧状态的波动相关联的发动机功率的误差,可能会发生实际驱动力的误差,但是与发动机功率的误差相关联的电池的充电和放电电力的变化被减小。因此,其充电和放电由于可容许充电电力和可容许放电电力中的至少一个已经变得小于第三预定值而受到相对严格限制的电池能够更可靠地受到保护。
根据本公开的第二方面的一种行驶控制系统被配置为控制配备有电池的混合动力车辆的行驶。混合动力车辆包括第一控制器,该第一控制器被配置为计算电池的可容许充电电力和电池的可容许放电电力并输出计算结果。该行驶控制系统包括:发动机;第一旋转电机;经由输出轴连接到驱动轮的第二旋转电机;行星齿轮组;被配置为在电池、第一旋转电机和第二旋转电机之间转换电力的电力转换器;和第二控制器。行星齿轮组被配置为机械地耦合发动机、第一旋转电机和输出轴,并且被配置为在发动机、第一旋转电机和输出轴之间传递转矩。第二控制器被配置为根据从第一控制器接收的可容许充电电力和可容许放电电力来控制电力转换器。作为控制模式,第二控制器具有其中电气地连接在电池和电力转换器之间的继电器断开以使混合动力车辆在电池从电力转换器电气地断连的情况下移动的无电池行驶模式。第二控制器被配置为:当可容许充电电力的大小和可容许放电电力的大小中的至少一个变得小于预定值时选择无电池行驶模式。
根据本公开的第二方面的行驶控制系统,如在第一方面中那样,即使在第一和第二控制器之间的通信存在问题时,也能够使混合动力车辆移动。
在根据本公开的第三方面的一种控制混合动力车辆的方法中,混合动力车辆包括发动机、第一旋转电机、经由输出轴连接到驱动轮的第二旋转电机、行星齿轮组、电池、被配置为在电池、第一旋转电机和第二旋转电机之间转换电力的电力转换器、电气地连接在电池和电力转换器之间的继电器,和第一和第二控制器。行星齿轮组被配置为机械地耦合发动机、第一旋转电机和输出轴,并且被配置为在发动机、第一旋转电机和输出轴之间传递转矩。第一控制器被配置为计算电池的可容许充电电力和电池的可容许放电电力并输出计算结果。第二控制器被配置为根据从第一控制器接收的可容许充电电力和可容许放电电力来控制发动机和电力转换器。第二控制器被配置为执行其中继电器断开以使混合动力车辆在电池从电力转换器电气地断连的情况下移动的无电池行驶控制。该方法包括:当可容许充电电力的大小和可容许放电电力的大小中的至少一个变得小于预定值时,由第二控制器执行无电池行驶控制。
根据本公开的第三方面的方法,如在本公开的第一和第二方面中那样,即使当在第一和第二控制器之间的通信存在问题时,也能够使混合动力车辆移动。
根据本公开的第一、第二和第三方面,即使当在第一和第二控制器之间的通信存在问题时,也能够使混合动力车辆移动。
附图简要说明
下面将参考附图描述本发明的示例性实施例的特征、优点以及技术和工业意义,其中,相同的附图标记表示相同的元件,并且其中:
图1概略地示意根据第一实施例的混合动力车辆的总体配置;
图2是动力分配装置的列线图;
图3是示意正常模式下的过程的示例的流程图;
图4是示意无电池行驶模式下的过程的示例的流程图;
图5是示意无电池行驶模式下的第一电动发电机、第二电动发电机和发动机的控制状态的列线图;
图6是示意电池的充电和放电限制的概念图表;
图7是示意第一实施例中的混合动力车辆的控制模式的切换的状态转换图表;
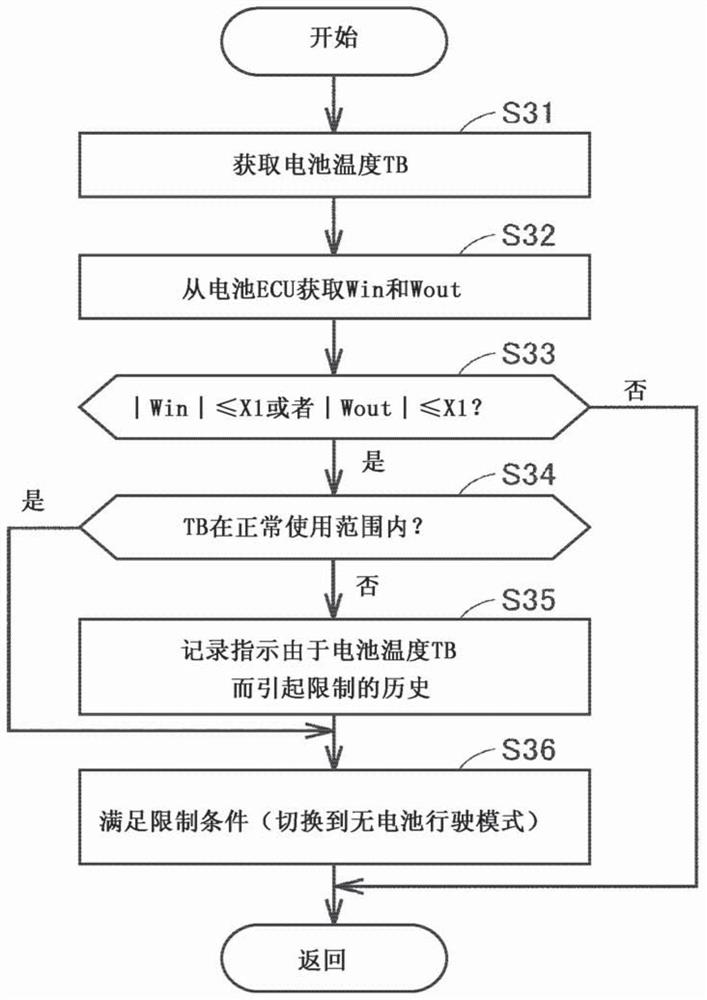
图8是示意用于在正常模式期间切换控制模式的过程的示例的流程图;
图9是示意用于在无电池行驶模式期间切换控制模式的过程的示例的流程图;
图10是示意第二实施例中的混合动力车辆的控制模式的切换的状态转换图表;
图11是示意在第二实施例中在电池的可容许充电电力和可容许放电电力与控制模式之间的关系的曲线图;
图12是示意根据第二实施例的用于确定限制条件是否满足的过程的示例的流程图;
图13是示意根据第二实施例的用于确定返回条件是否满足的过程的示例的流程图;
图14是示意第三实施例中的混合动力车辆的控制模式的切换的状态转换图表;
图15是示意降低保证模式下的过程的示例的流程图;
图16是示意在第三实施例中在电池的可容许充电电力和可容许放电电力与控制模式之间的关系的曲线图;
图17是示意根据第三实施例的用于确定限制条件是否满足的过程的示例的流程图;并且
图18是示意根据第三实施例的用于确定返回条件是否满足的过程的示例的流程图。
具体实施方式
将参考附图详细描述本公开的实施例。在所有的图中,相同或对应的部分用相同的附图标记表示,并且将不重复其描述。
第一实施例
混合动力车辆的总体配置
图1概略地示意根据第一实施例的混合动力车辆的总体配置。参考图1,车辆100是混合动力车辆,并且包括电池组1和HV系统2。HV系统2能够被视为根据本公开的“行驶控制系统”。
电池组1包括电池10、电池传感器组20、系统主继电器(SMR)30和电池ECU 40。HV系统2包括功率控制单元(PCU)50、第一电动发电机(MG1)61、第二电动发电机(MG2)62、发动机63、动力分配装置71、驱动轴72、驱动轮73、高电压DC-DC转换器81、负载82、辅助DC-DC转换器83、辅助电池84和HVECU 90。
电池10包括由多个单体构成的电池组。每个单体是诸如锂离子单体或镍金属氢化物单体的二次单体。电池10存储用于驱动第一电动发电机61和第二电动发电机62的电力,并通过PCU 50将电力供应到第一电动发电机61和第二电动发电机62。当第一电动发电机61和第二电动发电机62产生电力时,电池10通过PCU 50利用所产生的电力进行充电。
电池传感器组20包括电压传感器21、电流传感器22和温度传感器23。电压传感器21检测电池10中的每个单体的电压。电流传感器22检测输入到电池10和从电池10输出的电流IB。温度传感器23检测电池10的温度TB(以下也称为“电池温度TB”)。每个传感器将其检测结果输出到电池ECU 40。
SMR 30被电气地连接到连接电池10和PCU 40的电力线。SMR 30响应于来自HVECU90的控制命令将PCU 40电气地连接到电池10或将其从电池10断连。SMR 30能够被视为根据本公开的“继电器”。
电池ECU 40包括诸如中央处理单元(CPU)的处理器41、诸如只读存储器(ROM)和随机存取存储器(RAM)的存储器42、和用于接收和输出各种信号的输入和输出端口(未示出)。电池ECU 40基于从电池传感器组20的传感器接收的信号与存储在存储器42中的程序和映射来监视电池10的状态。
由电池ECU 40执行的主过程包括计算电池10的可容许充电电力Win和可容许放电电力Wout的过程。可容许充电电力Win是电池10的充电电力的控制上限,并且被设定为Win≤0。当可容许充电电力Win被设定为Win=0时,这意味着电池10的充电被禁止。类似地,可容许放电电力Wout是电池10的放电电力的控制上限,并且被设定为Wout≥0。当可容许放电电力Wout被设定为Wout=0时,这意味着电池10的放电被禁止。稍后将参考图6详细描述计算可容许充电电力Win和可容许放电电力Wout的过程。
PCU 50根据来自HVECU 90的控制命令在电池10与第一和第二电动发电机61、62之间,或者在第一电动发电机61与第二电动发电机62之间双向地转换电力。PCU 50被配置为使得它能够独立地控制第一电动发电机61和第二电动发电机62的状态。例如,PCU 50能够在使第一电动发电机61再生(发电)时使第二电动发电机62执行电力运行。PCU 50包括例如用于第一电动发电机61和第二电动发电机62的两个逆变器(未示出),和将待供应到每个逆变器的直流(DC)电压升压到等于或高于电池10的输出电压的电压的转换器(未示出)。PCU50能够被视为根据本公开的“电力转换器”。
第一电动发电机61和第二电动发电机62中的每一个是交流(AC)旋转电机,并且例如是具有嵌入转子中的永磁体的三相AC同步电动机。第一电动发电机61能够被视为根据本公开的“第一旋转电机”。第二电动发电机62能够被视为根据本公开的“第二旋转电机”。
第一电动发电机61主要用作经由动力分配装置71由发动机63驱动的发电机。由第一电动发电机61产生的电力经由PCU 50被供应到第二电动发电机62或电池10。第一电动发电机61也能够使发动机63起动。
第二电动发电机62主要作为电动机操作并驱动驱动轮73。第二电动发电机62由来自电池10的电力和由第一电动发电机61产生的电力中的至少一个来驱动,并且第二电动发电机62的驱动力被传递到驱动轴(输出轴)72。当制动车辆时或当在下坡上降低加速度时,第二电动发电机62作为用于再生的发电机操作。由第二电动发电机62产生的电力经由PCU50被供应到电池10。
发动机63通过将由空气-燃料混合物的燃烧产生的燃烧能转换成诸如活塞或转子的移动元件的动能来输出动力。
动力分配装置71是行星齿轮组。尽管未在图中示出,但是动力分配装置71包括太阳齿轮、环形齿轮、小齿轮和载架。载架被耦合到发动机63。太阳齿轮被耦合到第一电动发电机61。环形齿轮经由驱动轴72被耦合到第二电动发电机62和驱动轮73。小齿轮与太阳齿轮和环形齿轮啮合。载架保持小齿轮,使得小齿轮能够旋转和绕转。
图2是动力分配装置71的列线图。由于动力分配装置71被如上所述地配置,因此第一MG旋转速度Nm1(太阳齿轮的旋转速度)、发动机旋转速度Ne(载架的旋转速度)、和第二MG旋转速度Nm2(环形齿轮的旋转速度)在动力分配装置71的列线图上由直线连接。即,当第一MG旋转速度Nm1、发动机旋转速度Ne和第二MG旋转速度Nm2中的任何两个被确定时,也确定了其余的旋转速度。
返回参考图1,高电压DC-DC转换器81是被电气地连接在SMR 30和负载82之间的单向DC-DC转换器。高电压DC-DC转换器81根据基于来自HVECU 90的控制信号执行的晶体管(未示出)的切换操作,降低经由SMR 30从电池10传递的电力的电压,并且将所降压的电压供应到负载82和辅助DC-DC转换器83。高电压DC-DC转换器81能够被视为根据本公开的“DC-DC转换器”。
负载82被电气地连接在高电压DC-DC转换器81和辅助DC-DC转换器83之间。负载82是利用从高电压DC-DC转换器81和辅助DC-DC转换器83中的至少一个供应的电力进行操作的各种装置。更具体地,负载82包括辅助装置和线控(by-wire)系统(这两者均未示出)。辅助装置包括例如灯(前灯、雾灯、转向信号灯、转向灯等)、空调系统、音响系统、汽车导航系统、防抱死制动系统(ABS)、油泵、仪表、除雾器、和驱动刮水器以及电动车窗的致动器。线控系统包括电动助力转向、加速器和制动器(诸如制动致动器)。
辅助DC-DC转换器83被电气地连接在负载82和辅助电池84之间。辅助DC-DC转换器83是双向DC-DC转换器,并且例如是扼流圈转换器或反激转换器。辅助DC-DC转换器83被配置为使其能够根据基于来自HVECU 90的控制信号执行的晶体管(未示出)的切换操作在负载82和辅助电池84之间双向地转换DC电力。更具体地,当SMR30闭合时,辅助DC-DC转换器83能够降低从电池10经由高电压DC-DC转换器81供应以对辅助电池84充电的电力。当SMR 30断开时,辅助DC-DC转换器83能够对辅助电池84放电,以将电源电压供应到负载82和HVECU90。
辅助电池84被配置为使其能够被辅助DC-DC转换器83充电和放电。辅助电池84的输出电压低于电池10的输出电压(例如,大约200V)并且例如是大约12V。辅助电池84是例如铅酸电池,但是辅助电池84的类型不受特别限制。可以使用诸如双电层电容器的电容器代替辅助电池84。
像电池ECU 40那样,HVECU 90包括诸如CPU的处理器91、诸如ROM和RAM的存储器92、和输入和输出端口(未示出)。HVECU90基于从电池ECU 40接收的数据与存储在存储器92中的程序和映射来执行车辆100的行驶控制。在本实施例中,HVECU 90在车辆100的控制模式之间切换。车辆100的控制模式包括“正常模式”和“无电池行驶模式”。这些控制模式也将在后面描述。
电池ECU 40能够被视为根据本公开的“第一控制器”。HVECU 90能够被视为根据本公开的“第二控制器”。如在JP2019-156007A等中描述的,HVECU 90可以根据功能由多个ECU(发动机ECU、MGECU等)构成。
正常模式
首先,将描述正常模式,该正常模式是在车辆100正常行驶时使用的模式。
图3是示意在正常模式下执行的过程的示例的流程图。由图3和稍后描述的图(图4、8、9等)的流程图表示的过程被从主例程调用并且当满足预定条件时被以预定周期重复地执行。这些流程图中的每一个步骤基本上由HVECU 90通过软件处理来实现,但是可以由设置在HVECU 90中的电子电路通过硬件处理来实现。在流程图的随后的描述中,“S”代表“步骤”。
参考图3,在S11中,HVECU 90计算由用户对车辆100请求的驱动力(以下也称为“请求驱动力P*”)。具体地,HVECU 90的存储器92已经在其中存储了针对每个变速范围预先制备的驱动力映射(未示出)。驱动力映射定义了在请求驱动力P*、加速器操作量(加速器踏板的操作量)A和车速V(第二MG旋转速度Nm2)之间的关系。HVECU 90能够通过使用驱动力映射从选择的变速范围、加速器操作量A和车速V计算请求驱动力P*。
在S12中,HVECU 90计算为了实现请求驱动力P*所需的请求车辆功率。具体地,HVECU 90能够通过将请求驱动力P*乘以车速V并将预定损失功率添加到所得乘积来计算请求车辆功率。
在S13中,HVECU 90基于请求车辆功率来确定是运转还是停止发动机63。例如,当请求车辆功率大于预定阈值时,HVECU 90确定运转发动机63。HVECU 90在其确定运转发动机63时执行S14和随后的步骤。
在S14中,HVECU 90根据请求发动机功率计算期望发动机旋转速度Ne*。更具体地,由于车辆100所需的功率基本上是从发动机63输出的,因此能够说请求发动机功率等于请求车辆功率。HVECU 90的存储器92已经在其中存储了推荐操作线,该推荐操作线指示发动机转矩Te如何随发动机旋转速度Ne变化。推荐操作线例如是指示发动机转矩Te如何变化从而实现高燃料效率的最佳燃料经济性线。HVECU90能够通过将表示等于请求发动机功率的输出的等功率线与推荐操作线的交叉点设定为发动机63的操作点来计算期望发动机旋转速度Ne*。
在S15中,HVECU 90计算用于使发动机旋转速度Ne更接近期望发动机旋转速度Ne*的第一电动发电机61的期望转矩Tg*(以下称为“期望第一MG转矩Tg*”)。HVECU 90能够通过基于在当前发动机旋转速度Ne和期望发动机旋转速度Ne*之间的差异的反馈控制来计算期望第一MG转矩Tg*。
在S16中,HVECU 90计算发动机直接转矩Tep。发动机直接转矩Tep是以第一MG转矩Tg作为反力从发动机63传递到动力分配装置71的环形齿轮(即,驱动轴72)的在正向方向上的转矩(见稍后描述的图7)。在发动机直接转矩Tep和期望第一MG转矩Tg*之间的关系根据动力分配装置71的齿轮比ρ而唯一地确定(见随后的等式(1))。因此,能够根据期望第一MG转矩Tg*计算发动机直接转矩Tep。
Tep=-1/ρ×Tg* (1)
在S17中,HVECU 90计算第二电动发电机62的期望转矩Tm*(以下称为“期望第二MG转矩Tm*”)。期望第二MG转矩Tm*被确定为实现在S11中计算的请求驱动力P*。具体地,HVECU90能够通过从请求驱动力P*减去发动机直接转矩Tep来计算期望第二MG转矩Tm*(见随后的等式(2))。
Tm*=P*-Tep (2)
在S18中,HVECU 90控制PCU 50,使得第一电动发电机61的转矩(第一MG转矩Tg)和第二电动发电机62的转矩(第二MG转矩Tm)分别变得更接近期望第一MG转矩Tg*和期望第二MG转矩Tm*。
无电池行驶模式
接下来,将描述无电池行驶模式。无电池行驶模式是其中SMR 30被断开并且车辆100在电池10从电气系统(PCU 50、第一电动发电机61和第二电动发电机62)断连的情况下移动的模式。
更具体地,在无电池行驶模式下执行“发动机反馈(F/B)控制”和“功率平衡控制”。发动机反馈控制是对发动机转矩Te进行反馈控制以将发动机旋转速度Ne控制为期望发动机旋转速度Ne*的过程。功率平衡控制是控制PCU 50从而由用户请求的驱动力(请求驱动力)被传递到驱动轮73并且由第一电动发电机61产生的电力(以下也称为“第一MG发电功率”)变得等于由第二电动发电机62所消耗的电力(以下也称为“第二MG放电功率”)的过程。
图4是示意在无电池行驶模式下执行的过程的示例的流程图。参考图4,在S21中,HVECU 90起动发动机63(或者如果已经起动,则使发动机63保持操作)。在S22中,HVECU 90断开SMR 30以将电池10从电气系统电气地断连。
HVECU 90在S23和S24中执行发动机反馈控制,并且在S25到S27中执行功率平衡控制。功率平衡控制和发动机反馈控制是独立执行的。虽然图4示意了在发动机反馈控制之后执行功率平衡控制的示例,但是发动机反馈控制和功率平衡控制可以以相反的顺序执行。
在S23中,HVECU 90设定期望发动机旋转速度Ne*。例如,当车速V较低时,HVECU 90将期望发动机旋转速度Ne*的上限设定为较低值。当加速器操作量A较大时,HVECU 90将期望发动机旋转速度Ne*设定为在设定的上限内的较高值。
在S24中,HVECU 90对发动机转矩Te进行反馈控制(具体地,节气门开度、点火定时、燃料喷射量等),以使发动机旋转速度Ne变得更接近期望发动机旋转速度Ne*。
在S25中,HVECU 90基于加速器操作量A和车速V计算请求驱动力P*。
在S26中,HVECU 90计算期望第一MG转矩Tg*和期望第二MG转矩Tm*,从而将与请求驱动力P*相对应的功率传递到驱动轮73,并且第一MG发电功率和第二MG放电功率变得彼此相等。具体地,HVECU 90能够通过求解表示在无电池行驶模式期间发动机63、第一电动发电机61和第二电动发电机62的控制状态的以下一对等式(3)和(4),来计算期望第一MG转矩Tg*和期望第二MG转矩Tm*。
P*=(-Tg*/ρ)×Nm2+Tm*×Nm2 (3)
Tg*×Nm1+Tm*×Nm2=0 (4)
图5是示意在无电池行驶模式下第一电动发电机61、第二电动发电机62和发动机63的控制状态的示例的列线图。
参考图4和5,在无电池行驶控制期间(在车辆100向前移动时),发动机63在前向方向上旋转。此时,第一电动发电机61在前向方向上旋转并产生发电转矩(在负向方向上的转矩),并且第二电动发电机62在前向方向上旋转并产生放电转矩(在正向方向上的转矩)。因此,在等式(3)和(4)中,期望第一MG转矩Tg*具有负值,并且期望第二MG转矩Tm*、第一MG旋转速度Nm1和第二MG旋转速度Nm2具有正值。
在等式(3)中,(-Tg*/ρ)等于发动机直接转矩Tep(见等式(2))。因此,在等式(3)的右侧上的第一项{(-Tg*/ρ)×Nm2}表示从发动机63传递到驱动轴72的功率。在等式(3)的右侧上的第二项(Tm*×Nm2)表示从第二电动发电机62传递到驱动轴72的功率,即,第二MG放电功率。因此,等式(3)指示通过从发动机63传递到驱动轴72的功率和第二MG放电功率之和实现了请求驱动力P*。
在等式(4)的左侧上的第一项(Tg*×Nm1)表示第一MG发电功率。如上所述,在无电池行驶控制期间(在车辆100向前移动时),第一电动发电机61在前向方向上旋转并产生发电转矩(Nm1>0并且Tg*<0)。因此,(Tg*×Nm1)具有负值。在等式(4)的左侧上的第二项(Tm*×Nm2)表示第二MG放电功率。在无电池行驶控制期间(在车辆100向前移动时),第二电动发电机62在前向方向上旋转并产生放电转矩(Nm2>0并且Tm*>0)。因此,(Tm*×Nm2)具有正值。因此,等式(4)指示第一MG发电功率的大小(绝对值)和第二MG放电功率的大小(绝对值)相等。
在S27中,HVECU 90控制PCU 50,以使第一MG转矩Tg和第二MG转矩Tm分别变得更接近期望第一MG转矩Tm*和期望第二MG转矩Tm*。
充电和放电的限制
在车辆100中,为了保护电池10,电池10的充电和放电受到限制。在本实施例中,HVECU 90根据电池10的温度TB(电池温度TB)来限制电池10的可容许充电电力Win和电池10的可容许放电电力Wout。
图6是示意电池10的充电和放电的限制的概念图表。在图6中,横坐标表示电池温度TB,并且纵坐标上的向上方向表示可容许放电电力Wout,并且纵坐标上的向下方向表示可容许充电电力Win。
参考图6,为了减慢电池10的劣化,与在正常温度范围(Tlow≤TB≤Tup的范围)中相比,在低温度范围(TB<Tlow的范围)和高温度范围(TB>Tup的范围)中,可容许充电电力Win的大小和可容许放电电力Wout的大小更小。HVECU 90设定期望第一MG转矩Tg*和期望第二MG转矩Tm*,使得第一电动发电机61的充电和放电电力与第二电动发电机62的充电和放电电力之和在在电池10的可容许充电电力Win和可容许放电电力Wout之间的范围内。
当电池温度TB变得低于最低温度Tmin或高于最高温度Tmax时,HVECU 90禁止电池10的充电和放电。以下,最低温度Tmin或以上以及最高温度Tmax或以下的温度范围也被称为“正常使用范围”。
尽管图6示意可容许充电电力Win和可容许放电电力Wout的温度依赖性的示例,但是可以根据例如电池10的充电状态(SOC)来限制可容许充电电力Win和可容许放电电力Wout。
系统兼容性
关于如上所述配置的车辆100,可能存在电池组1的公司(公司A)和HV系统2的公司(公司B)不同的情况。在这种情况下,在电池组1和HV系统2之间的兼容性(协调)可能成为问题。
更具体地,关于电池10的可容许充电电力Win和可容许放电电力Wout的数据从电池组1中的电池ECU 40被发送到HV系统2中的HVECU 90。例如,在公司A和公司B对通信的内容、定时等有不同的理解的情况下,或者在公司A和B之间在通信方面的协调不够的情况下,有可能与HVECU 90期望的数据不同的数据可能作为关于电池10的可容许充电电力Win和可容许放电电力Wout的数据从电池ECU40被发送到HVECU 90。具体地,电池ECU 40有可能将可容许充电电力Win和可容许放电电力Wout设定为过小的值(例如,接近0的值)。在这种情况下,即使电池10的温度实际上不是低的或高的,HVECU 90也可能减少(或禁止)电池10的充电和放电。结果,车辆100可能变得不能移动。
本实施例使用下述配置:其中,当在正常模式期间从电池ECU 40发送的可容许充电电力Win的大小或可容许放电电力Wout的大小变得过小时,控制模式从正常模式被切换到无电池行驶模式,无论可容许充电电力Win的大小或可容许放电电力Wout的大小的这种减小是由于电池温度TB已经脱离正常使用范围还是由于在电池组1和HV系统2之间的兼容性所导致的。无电池行驶模式是最初旨在在电池10中存在异常的情况下用于车辆100的跛行回家行驶(故障安全行驶)的控制模式。然而,在本实施例中,无电池行驶模式不仅用于这个目的。无论是否需要跛行回家行驶,控制模式都被主动地切换到无电池行驶模式,从而确保了车辆100的行驶性能。
控制模式的切换
图7是示意第一实施例中的车辆100的控制模式的切换的状态转换图表(状态机图表)。参考图7,当在正常模式期间满足预定“限制条件”时,HVECU 90将车辆100的控制模式从正常模式切换到无电池行驶模式。当在无电池行驶模式期间满足预定“返回条件”时,HVECU90将车辆100的控制模式从无电池行驶模式切换回正常模式。将参考流程图描述限制条件和返回条件。
控制流
图8是示意在正常模式期间用于切换控制模式(确定是否满足限制条件)的过程的示例的流程图。参考图8,在S31中,HVECU 90获取由温度传感器23检测到的电池温度TB。HVECU 90可以通过与电池ECU 40通信来获取电池温度TB,或者可以直接从温度传感器23获取电池温度TB。HVECU 90还从电池ECU 40获取电池10的可容许充电电力Win和可容许放电电力Wout(S32)。
随后,在S33和S34中,HVECU 90确定电池10的可容许充电电力Win的大小是否等于或小于第一预定值X1。HVECU 90还确定电池10的可容许放电电力Wout的大小是否等于或小于第一预定值X1。为了便于理解该描述,在该示例中,将可容许充电电力Win的大小和可容许放电电力Wout的大小这两者与相同值(第一预定值X1)进行比较。然而,可以将可容许充电电力Win的大小和可容许放电电力Wout的大小与彼此不同的值进行比较。
当可容许充电电力Win的大小大于第一预定值X1并且可容许放电电力Wout的大小大于第一预定值X1时(在S33中为否),HVECU90不切换车辆100的控制模式并且该过程返回主例程。即,HVECU 90维持车辆100的正常模式。
在另一个方面,当可容许充电电力Win的大小等于或小于第一预定值X1或可容许放电电力Wout的大小等于或小于第一预定值X1时(在S33中为是),该过程进行到S34,并且HVECU 90确定电池温度TB是否在正常使用范围内。如上所述,正常使用范围是其中可容许充电电力Win不变得等于0并且可容许放电电力Wout不变得等于0的温度范围。在图6的示例中,正常使用范围是从TB=Tmin到TB=Tmax的温度范围。
当电池温度TB在正常使用范围以外时(在S34中为否),由于电池温度TB高或低,极有可能可容许充电电力Win的大小或可容许放电电力Wout的大小已经变得等于或小于第一预定值X1。因此,HVECU 90在存储器92上非易失性地记录历史,该历史指示由于电池温度TB的上升或下降而已经变得有必要降低电池10的充电和放电电力(以下也称为“温度变化历史”)(S35)。例如,HVECU 90能够将分配给存储器92的管理标志设定为ON。然后,该过程进行到S36。
当电池温度TB在正常使用范围内时(在S34中为是),可能由于在电池组1和HV系统2之间的兼容性而不是由于电池温度TB的变化而变得有必要降低电池10的充电和放电电力。因此,HVECU 90不记录温度变化历史,并且该过程进行到S36。
在S36中,HVECU 90确定满足限制条件。然后,HVECU 90将车辆100的控制模式从正常模式切换到无电池行驶模式。
图9是示意在无电池行驶模式期间用于切换控制模式(确定是否满足返回条件)的过程的示例的流程图。参考图9,HVECU 90首先获取电池温度TB(S41),并从电池ECU 40获取电池10的可容许充电电力Win和可容许放电电力Wout(S42)。
在S43中,HVECU 90确定电池10的可容许充电电力Win的大小是否大于第一预定值X1。HVECU 90还确定电池10的可容许放电电力Wout的大小是否大于第一预定值X1。
当可容许充电电力Win的大小等于或小于第一预定值X1时,或者当可容许放电电力Wout的大小等于或小于第一预定值X1时(在S43中为否),可能仍然有必要降低电池10的充电和放电电力。该过程因此返回主例程,并且HVECU 90维持车辆100的无电池行驶模式。
当可容许充电电力Win的大小大于第一预定值X1并且可容许放电电力Wout的大小大于第一预定值X1时(在S43中为是),即,当变得不再那么有必要降低电池10的充电和放电电力时,该过程进行到S44,并且HVECU 90确定存储器92是否已经在其上记录了温度变化历史(见图8中的S35)。
当不存在温度变化历史时(在S44中为否),电池10的充电和放电电力可能已经由于在电池组1和HV系统2之间的兼容性而降低。在这种情况下,HVECU 90不将车辆100的控制模式切换回正常模式,而是维持无电池行驶模式。
当存在温度变化历史时(在S44中为是),电池10的充电和放电电力可能已经由于电池温度TB的变化而不是由于在电池组1和HV系统2之间的兼容性而降低。因此,在由于电池温度TB已经回到正常使用范围中而已经变得不再那么有必要降低电池10的充电和放电电力的情况下,车辆100的控制模式能够被切换回正常模式。
然而,期望避免在车辆100移动时将车辆100的控制模式切换回正常模式。因此,在S45到S47中,HVECU 90确定车辆100是否完全停止并且准备返回正常模式。具体地,HVECU90确定是否车速V=0(S45),是否车辆100的制动器处于操作中(S46),以及是否车辆100的加速器踏板未被操作(加速器操作量A=0)(S47)。
当S45到S47的确定结果中的至少一个为否时,HVECU 90确定车辆100的行驶状态不适合返回正常模式,并且该过程返回主例程(不满足返回条件)。当S45到S47的所有确定结果均为是时,HVECU 90确定车辆100的行驶状态适合返回正常模式,并确定满足返回条件(S48)。
如上所述,在第一实施例中,HV系统2中的HVECU 90从电池组1中的电池ECU 40接收电池10的可容许充电电力Win和可容许放电电力Wout。当在车辆100的正常模式期间可容许充电电力Win的大小变得等于或小于第一预定值X1或者可容许放电电力Wout的大小变得等于或小于第一预定值X1时,HVECU 90将车辆100的控制模式切换到无电池行驶模式,无论可容许充电电力Win的大小或可容许放电电力Wout的大小的这种减小是由于电池10的状态还是由于在电池ECU 40和HVECU 90之间的通信所导致的。因此,即使当在电池ECU40和HVECU 90之间的通信存在问题时,也能够使车辆100移动。
当将车辆100的控制模式切换到无电池行驶模式时,HVECU 90还确定是否记录温度变化历史。当存在温度变化历史时,当可容许充电电力Win和可容许放电电力Wout恢复时(当可容许充电电力Win的大小变得大于第一预定值X1并且可容许放电电力Wout的大小变得大于第一预定值X1时),HVECU 90能够将控制模式切换回正常模式,因为HVECU 90确定在电池ECU 40和HVECU 90之间的通信不存在问题(在电池组1和HV系统2之间的兼容性不存在问题)。因此,能够快速地恢复车辆100的行驶性能。
当不存在温度变化历史时,即使可容许充电电力Win和可容许放电电力Wout恢复,HVECU 90也维持无电池行驶模式,因为在电池ECU 40和HVECU 90之间的通信可能存在问题。因此能够在保护电池10时确保车辆100的一定水平的行驶性能。
第二实施例
如在第一实施例中描述的,当电池10的可容许充电电力Win的大小减小并且可容许放电电力Wout的大小也减小时,HVECU 90减少电池10的充电和放电。在第二实施例中,将描述下述配置:其中当电池10的充电和放电减少时,辅助电池84被用于负载82的操作。
由于根据第二实施例和稍后描述的第三实施例的混合动力车辆的总体配置类似于根据第一实施例的车辆100的总体配置(见图1),因此将不重复其描述。
状态转换图表
图10是示意第二实施例中的车辆100的控制模式的切换的状态转换图表。参考图10,在第二实施例中,HVECU 90除了正常模式和无电池行驶模式之外还具有“辅助恒定电力模式”。
在正常模式下,HVECU 90对高电压DC-DC转换器81执行恒定电压控制。当负载82的电力消耗在恒定电压控制期间发生波动时,诸如当任何灯被接通或关断或刮水器被接通或关断时,高电压DC-DC转换器81的充电和放电电力波动。然而,通过高电压DC-DC转换器81的恒定电压控制,能够将负载82的电压保持恒定。
电池10的充电和放电电力可以随着高电压DC-DC转换器81的充电和放电电力的波动而波动。因此,当由于可容许充电电力Win和可容许放电电力Wout的降低而必须减少电池10的充电和放电时,高电压DC-DC转换器81的波动的充电和放电电力可能无法仅由电池10覆盖。
在第二实施例中,当电池10的可容许充电电力Win和可容许放电电力Wout降低时(在切换到无电池行驶模式之前),HVECU 90将车辆100的控制模式从正常模式切换到辅助恒定电力模式。具体地,HVECU 90将高电压DC-DC转换器81的控制从正常模式下的恒定电压控制切换到恒定电力控制。因此,即使当负载82的电力消耗波动时,高电压DC-DC转换器81的输入和输出电力也是恒定的。因此,减小了负载82的电力消耗的波动对电池10的影响。在这种情况下,负载82的电压可能波动,但是负载82的这种电压波动能够由辅助电池84吸收。
当在正常模式期间满足“第一限制条件”时,HVECU 90将车辆100的控制模式从正常模式切换到辅助恒定电力模式。当在辅助恒定电力模式期间满足“第二限制条件”时,HVECU 90将车辆100的控制模式从辅助恒定电力模式切换到无电池行驶模式。当在无电池行驶模式期间满足“第一返回条件”时,HVECU 90将车辆100的控制模式从无电池行驶模式切换回辅助恒定电力模式。当在辅助恒定电力模式期间满足“第二返回条件”时,HVECU 90将车辆100的控制模式从辅助恒定电力模式切换回正常模式。
尽管图中未示出,但是当在正常模式期间满足“第二限制条件”时,HVECU 90可以通过跳过辅助恒定电力模式将车辆100的控制模式从正常模式直接切换到无电池行驶模式。当在无电池行驶模式期间满足“第二返回条件”时,HVECU 90可以通过跳过辅助恒定电力模式将车辆100的控制模式从无电池行驶模式直接切换到正常模式。
与Win和Wout的关系
图11是示意在第二实施例中在电池10的可容许充电电力Win和可容许放电电力Wout与控制模式之间的关系的曲线图。在稍后描述的图11和图16中,横坐标表示电池10的可容许充电电力Win的大小(绝对值),并且纵坐标表示电池10的可容许放电电力Wout的大小。
参考图11,(1)当可容许充电电力Win的大小等于或小于第一预定值X1时或者(2)当可容许放电电力Wout的大小等于或小于第一预定值X1时,能够选择无电池行驶模式。以下,可容许充电电力Win和可容许放电电力Wout的这个区域被称为“充电和放电区域R3”。
(1)当可容许充电电力Win的大小大于X1并且可容许放电电力Wout的大小大于X1并且等于或小于X2时,或者(2)当可容许充电电力Win的大小大于X1并且等于或小于X2并且可容许放电电力Wout的大小大于X1时,能够选择辅助恒定电力模式。以下,可容许充电电力Win和可容许放电电力Wout的这个区域被称为“充电和放电区域R2”。
在除了以上之外的情况下,即,当可容许充电电力Win的大小大于X2并且可容许放电电力Wout的大小大于X2时,能够选择正常模式。以下,可容许充电电力Win和可容许放电电力Wout的这个区域被称为“充电和放电区域R1”。
第二实施例(和稍后描述的第三实施例)还示意了其中针对每个控制模式将可容许充电电力Win的大小和可容许放电电力Wout的大小与相同值(第一预定值Xl或第二预定值X2)进行比较的示例。然而,这是为了避免描述的复杂化,并且可以将可容许充电电力Win的大小和可容许放电电力Wout的大小与彼此不同的值进行比较。
是否满足限制条件的确定
图12是示意根据第二实施例的用于确定是否满足限制条件(第一限制条件或第二限制条件)的过程的示例的流程图。参考图12,S51和S52类似于第一实施例中的S31和S32(见图8)。
在S53中,HVECU 90将电池10的可容许充电电力Win的大小和可容许放电电力Wout的大小与预定值(第一预定值Xl或第二预定值X2)进行比较。当可容许充电电力Win的大小和可容许放电电力Wout的大小被包括在充电和放电区域R2中时(S53中的R2),该过程进行到S54。S54和S55类似于第一实施例中的S34和S35。然后,HVECU90确定满足第一限制条件,并且选择辅助恒定电力模式作为车辆100的控制模式(S56)。
当在S53中可容许充电电力Win的大小和可容许放电电力Wout的大小被包括在充电和放电区域R3中时(S53中的R3),HVECU 90使该过程进行到S57。S57和S58类似于S54和S55。然后,HVECU 90确定满足第二限制条件,并且选择无电池行驶模式作为车辆100的控制模式(S59)。
当在S53中可容许充电电力Win的大小和可容许放电电力Wout的大小被包括在充电和放电区域R1中时(S53中的R1),HVECU 90不执行S54和随后的步骤或S57和随后的步骤,并且该过程返回主例程。在这种情况下,正常模式被选择作为车辆100的控制模式。
是否满足返回条件的确定
图13是示意根据第二实施例的用于确定是否满足返回条件(第一返回条件或第二返回条件)的过程的示例的流程图。参考图13,S601和S602类似于第一实施例中的S41和S42(见图9)。
在S603中,HVECU 90将电池10的可容许充电电力Win的大小和可容许放电电力Wout的大小与预定值(第一预定值Xl或第二预定值X2)进行比较。当可容许充电电力Win的大小和可容许放电电力Wout的大小被包括在充电和放电区域R2中时(S603中的R2),HVECU90使该过程进行到S604。S604到S607类似于第一实施例中的S44到S47(见图9)。然后,HVECU 90确定满足第一返回条件,并且选择辅助恒定电力模式作为车辆100的控制模式(S608)。
当在S603中可容许充电电力Win的大小和可容许放电电力Wout的大小被包括在充电和放电区域R1中时(S603中的R1),HVECU 90使该过程进行到S609。在S609中,HVECU 90确定是否存在温度变化历史。当存在温度变化历史时(在S609中为是),HVECU 90确定满足第二返回条件,并选择正常模式作为车辆100的控制模式(S610)。
当在S603中可容许充电电力Win的大小和可容许放电电力Wout的大小被包括在充电和放电区域R3中时(S603中的R3),HVECU 90不执行S604和随后的步骤或S609和随后的步骤并且该过程返回主例程。在这种情况下,无电池行驶模式被维持作为车辆100的控制模式。
如上所述,在第二实施例中,HVECU 90进一步具有辅助恒定电力模式,其中HVECU90执行高电压DC-DC转换器81的恒定电力控制。在辅助恒定电力模式中,通过在一定程度上允许伴随负载82的电力消耗的波动的、辅助电池84的电压波动,减小了电池10的充电和放电电力随着负载82的电力的波动的变化。因此,能够更可靠地保护其可容许充电电力Win和可容许放电电力Wout受到相对严格限制的电池10。
取决于辅助电池84的SOC,负载82的电力的波动可能不被辅助电池84完全吸收。当辅助电池84接近其完全充电状态时,辅助电池84能够仅接收少量的电力。当辅助电池84几乎用完时,辅助电池84只能够供应少量的电力。因此,期望根据辅助电池84的SOC来设定关于高电压DC-DC转换器81的充电和放电电力的变化率的上限,使得高电压DC-DC转换器81的充电和放电电力不会突然变化。具体地,当辅助电池84接近其完全充电状态时或当辅助电池84几乎用完时,能够使高电压DC-DC转换器81的充电和放电电力的变化率低到预定值或更小。
关于其中车辆100具有三种控制模式:正常模式、辅助恒定电力模式和无电池行驶模式的示例描述了第二实施例。然而,无电池行驶模式不是必需的控制模式。车辆100可以具有两种控制模式:正常模式和辅助恒定电力模式,并且可以被配置为在正常模式和辅助恒定电力模式之间切换控制模式。
第三实施例
即使当确定要输出的发动机转矩Te(或发动机功率Pe)时,由于过量的燃料供应等,在实际发动机控制中也可能在发动机功率Pe中出现轻微误差。在第三实施例中,将描述用于对发动机功率Pe中的误差进行操控的控制。
状态转换图表
图14是示意在第三实施例中车辆100的控制模式的切换的状态转换图表。参考图14,在第三实施例中,HVECU 90除了正常模式、辅助恒定电力模式和无电池行驶模式之外还具有“降低保证模式”。
如上所述,在正常模式下,根据用户对加速器踏板的操作调节每个转矩(发动机转矩Te、第一MG转矩Tg和第二MG转矩Tm)以实现请求驱动力P*。当发动机功率Pe变化时,第一MG功率和第二MG功率被控制为补偿该变化。因此,例如,当发动机功率Pe的期望值是4.0kW并且发动机功率Pe的实际值是4.5kW时,电池10以与其之间的差异相对应的电力充电,该差异为4.5kW-4.0kW=500W。当发动机功率Pe的期望值是4.0kW并且发动机功率Pe的实际值是3.5kW时,从电池10放电500W的电力。
如上所述,在正常模式下,发动机功率Pe的误差被电池10的充电或放电所吸收。该控制基于保证请求驱动力P*的设计思想,即优先考虑在由车辆100产生的驱动力中准确地反映用户对加速器踏板的操作。
在无电池行驶模式下,SMR 30断开并且电池10从PCU 50电气地断连。因此,与在正常模式中相比,调节第一MG功率和第二MG功率以实现请求驱动力P*可能更加困难。即,可能难以保证请求驱动力P*。
在第三实施例中,随着电池10的可容许充电电力Win的大小和可容许放电电力Wout的大小减小,控制模式在被切换到无电池行驶模式之前被切换到降低保证模式。在降低保证模式中,HVECU 90在保持SMR 30闭合的同时停止用于实现请求驱动力P*的第一MG功率和第二MG功率的反馈控制。在这种情况下,当发生发动机功率Pe的误差时,在该误差未通过电池10的充电或放电被充分吸收的情况下,车辆100的驱动力可能增加或减小。结果,车辆100的加速度或减速度的变化可能比在正常模式下更大。
如上所述,降低保证模式是基于在可容许充电电力Win的大小和可容许放电电力Wout的大小已经减小但不至于将控制模式切换到无电池行驶模式的情况下较不严格地保证请求驱动力P*的思想的控制模式。在降低保证模式下,允许在根据用户的加速器踏板的操作的驱动力(请求驱动力P*)和实际驱动力之间的轻微偏差。
在降低保证模式下,SMR 30闭合并且电池10能够被充电和放电。因此,在降低保证模式下车辆100的行驶性能比在无电池行驶模式下更好。从另一个角度来看,在未配备有牵引电池的传统车辆(诸如汽油车辆的传统车辆)中,发动机功率的误差可能直接影响车辆驱动力。还能够说降低保证模式是其中请求驱动力P*的保证水平与在传统车辆中的相同的控制模式。
当在正常模式期间满足“第一限制条件”时,HVECU 90将车辆100的控制模式从正常模式切换到辅助恒定电力模式。当在辅助恒定电力模式期间满足“第二限制条件”时,HVECU 90将车辆100的控制模式从辅助恒定电力模式切换到降低保证模式。当在降低保证模式期间满足“第三限制条件”时,HVECU 90将车辆100的控制模式从降低保证模式切换到无电池行驶模式。
当在无电池行驶模式期间满足“第一返回条件”时,HVECU 90将车辆100的控制模式从无电池行驶模式切换回降低保证模式。当在降低保证模式期间满足“第二返回条件”时,HVECU 90将车辆100的控制模式从降低保证模式切换回辅助恒定电力模式。当在辅助恒定电力模式期间满足“第三返回条件”时,HVECU 90将车辆100的控制模式从辅助恒定电力模式切换回正常模式。
同样在第三实施例中,HVECU 90可以跳过在一个模式和另一个模式之间的模式。例如,HVECU 90可以通过跳过辅助恒定电力模式而将车辆100的控制模式从正常模式切换到降低保证模式。HVECU 90可以通过跳过辅助恒定电力模式和降低保证模式而将车辆100的控制模式从正常模式切换到无电池行驶模式。HVECU 90可以通过跳过降低保证模式而将车辆100的控制模式从辅助恒定电力模式切换到无电池行驶模式。尽管将不重复详细描述,但是当将车辆100的控制模式从无电池行驶模式切换回正常模式时,这点同样适用。
降低保证模式
图15是示意在降低保证模式下的过程的示例的流程图。参考图15,由于S71到S74与正常模式下的S11到S14类似(见图3),因此将不重复其描述。
在S75中,HVECU 90根据在S74中计算的期望发动机旋转速度Ne*来计算期望第一MG转矩Tg*。即,HVECU 90不使用基于在当前发动机旋转速度Ne和期望发动机旋转速度Ne*之间的差异的反馈来计算期望第一MG转矩Tg*。
在S76中,HVECU 90根据期望第一MG转矩Tg*计算发动机直接转矩Tep。HVECU 90还通过从请求驱动力P*减去发动机直接转矩Tep来计算期望第二MG转矩Tm*(S77)。然后,HVECU 90控制PCU50,使得第一MG转矩Tg和第二MG转矩Tm分别变得更接近期望第一MG转矩Tg*和期望第二MG转矩Tm*(S78)。这些步骤类似于在正常模式下的对应步骤(S16到S18)。
如上所述,在降低保证模式下,即使当由于过量的燃料供应等而导致发动机63的操作点(发动机旋转速度Ne或发动机功率Pe)出现轻微误差时,也不对期望第一MG转矩Tg*(和期望第二MG转矩Tm*)进行任何调节以吸收该误差。在这种情况下,实际驱动力与请求驱动力P*的误差可能发生。然而,这种驱动力误差是允许的。
与Win和Wout的关系
图16是示意在第三实施例中在电池10的可容许充电电力Win和可容许放电电力Wout与控制模式之间的关系的曲线图。参考图16,当可容许充电电力Win的大小等于或小于X1时,或者当可容许放电电力Wout的大小等于或小于X1时,能够选择无电池行驶模式。以下,可容许充电电力Win和可容许放电电力Wout的这个区域被称为“充电和放电区域R4”。
(1)当可容许充电电力Win的大小大于X1并且可容许放电电力Wout的大小大于X1并且等于或小于X2时,或者(2)当可容许充电电力Win的大小大于X1并且等于或小于X2并且可容许放电电力Wout的大小大于X1时,能够选择降低保证模式。以下,可容许充电电力Win和可容许放电电力Wout的这个区域被称为“充电和放电区域R3”。
(1)当可容许充电电力Win的大小大于X2并且可容许放电电力Wout的大小大于X2并且等于或小于X3时,或者(2)当可容许充电电力Win的大小大于X2并且等于或小于X3并且可容许放电电力Wout的大小大于X2时,能够选择辅助恒定电力模式。以下,可容许充电电力Win和可容许放电电力Wout的这个区域被称为“充电和放电区域R2”。
在除了以上之外的情况下,即,当可容许充电电力Win的大小大于X3并且可容许放电电力Wout的大小大于X3时,能够选择正常模式。以下,可容许充电电力Win和可容许放电电力Wout的这个区域被称为“充电和放电区域R1”。
是否满足限制条件的确定
图17是示意根据第三实施例的用于确定是否满足限制条件的过程的示例的流程图。在稍后描述的图17和图18中,由于篇幅所限,未示出由HVECU 90获取电池温度TB和获取可容许充电电力Win和可容许放电电力Wout的步骤(见图12的S51和S52或图13的S601和S602)。
参考图17,在S801(和S808)中,HVECU 90将电池10的可容许充电电力Win的大小和可容许放电电力Wout的大小与预定值(第一到第三预定值X1到X3)进行比较。
当可容许充电电力Win的大小和可容许放电电力Wout的大小被包括在充电和放电区域R2中时(S801中的R2),HVECU 90确定满足第一限制条件,并且选择辅助恒定电力模式(S804)。在S804之前的S802和S803类似于第二实施例中的S54和S55(见图12)。S805、S806和S809、S810也类似于第二实施例中的S54和S55。
当可容许充电电力Win的大小和可容许放电电力Wout的大小被包括在充电和放电区域R3中时(S801中的R3),HVECU 90确定满足第二限制条件,并且选择降低保证模式(S807)。
当可容许充电电力Win的大小和可容许放电电力Wout的大小被包括在充电和放电区域R4中时(S801中的“其他”和S808中的R4),HVECU 90确定满足第三限制条件并选择无电池行驶模式(S811)。
当可容许充电电力Win的大小和可容许放电电力Wout的大小被包括在充电和放电区域R1中时(S801中的“其他”和S808中的R1),HVECU 90使该过程返回主例程。在这种情况下,第一到第三限制条件均不满足,并且控制模式不被切换到其中电池10的充电和放电被进一步减少的任何模式。
是否满足返回条件的确定
图18是示意根据第三实施例的用于确定是否满足返回条件的过程的示例的流程图。参考图18,在S901(和S908)中,HVECU 90将电池10的可容许充电电力Win的大小和可容许放电电力Wout的大小与预定值(第一到第三预定值X1到X3)进行比较。
当可容许充电电力Win的大小和可容许放电电力Wout的大小被包括在充电和放电区域R3中时(S901中的R3),HVECU 90确定满足第一返回条件并且选择降低保证模式(S905)。在S905之前的S902到S904类似于第二实施例中的S604到S607(见图13)。S906和S909类似于S902。
当可容许充电电力Win的大小和可容许放电电力Wout的大小被包括在充电和放电区域R2中时(S901中的R2),HVECU 90确定满足第二返回条件,并且选择辅助恒定电力模式(S907)。
当可容许充电电力Win的大小和可容许放电电力Wout的大小被包括在充电和放电区域R1中时(S901中的“其他”和S908中的R1),HVECU 90确定满足第三返回条件并且选择正常模式(S910)。
当可容许充电电力Win的大小和可容许放电电力Wout的大小被包括在充电和放电区域R4中时(S901中的“其他”和S908中的R4),HVECU 90使该过程返回主例程。在这种情况下,第一到第三返回条件均不满足,并且控制模式不被切换到其中电池10的充电和放电较不那么减少的任何模式。
如上所述,在第三实施例中,HVECU 90进一步具有降低保证模式,其中与在正常模式中相比,HVECU 90较不严格地保证请求驱动力P*。在降低保证模式下,通过在一定程度上允许伴随发动机转矩Te的波动发生的、实际驱动力与请求驱动力P*的误差,减小了伴随发动机功率Pe的波动的、电池10的充电和放电电力的波动。因此,能够更可靠地保护其可容许充电电力Win和可容许放电电力Wout受到相对严格限制的电池10。
随后的方面也可以用作本公开的修改。根据本公开的另一个方面的一种混合动力车辆包括:发动机;第一旋转电机;经由输出轴连接到驱动轮的第二旋转电机;行星齿轮组;电池;被配置为在电池、第一旋转电机和第二旋转电机之间转换电力的电力转换器;电气地连接在电池和电力转换器之间的继电器;辅助负载;电气地连接在继电器和辅助负载之间的DC-DC转换器;和被配置为向辅助负载供应电力的辅助电池;和第一和第二控制器。行星齿轮组被配置为机械地耦合发动机、第一旋转电机和输出轴,并且被配置为在发动机、第一旋转电机和输出轴之间传递转矩。第一控制器被配置为计算电池的可容许充电电力和电池的可容许放电电力并输出计算结果。第二控制器具有其中第二控制器在继电器闭合的情况下执行DC-DC转换器的恒定电压控制的恒定电压控制模式,和其中第二控制器在继电器闭合的情况下执行DC-DC转换器的恒定电力控制的恒定电力模式。第二控制器被配置为当可容许充电电力的大小和可容许放电电力的大小中的至少一个变得小于预定值时选择恒定电力模式。
随后的方面也可以用作本公开的修改。根据本公开的又一个方面的一种混合动力车辆包括:发动机;第一旋转电机;经由输出轴连接到驱动轮的第二旋转电机;行星齿轮组;电池;被配置为在电池、第一旋转电机和第二旋转电机之间转换电力的电力转换器;电气地连接在电池和电力转换器之间的继电器;辅助负载;电气地连接在继电器和辅助负载之间的DC-DC转换器;被配置为向辅助负载供应电力的辅助电池;和第一和第二控制器。行星齿轮组被配置为机械地耦合发动机、第一旋转电机和输出轴,并且被配置为在发动机、第一旋转电机和输出轴之间传递转矩。第一控制器被配置为计算电池的可容许充电电力和电池的可容许放电电力并输出计算结果。第二控制器被配置为根据从第一控制器接收的可容许充电电力和可容许放电电力来控制电力转换器。第二控制器具有正常模式和降低保证模式。正常模式是其中第二控制器在继电器闭合的情况下通过调节发动机的转矩、第一旋转电机的转矩和第二旋转电机的转矩来保证从混合动力车辆输出的驱动力被控制为请求驱动力的模式。降低保证模式是其中第二控制器在继电器闭合的情况下与在正常模式中相比较较不严格地保证从混合动力车辆输出的驱动力被控制为请求驱动力的模式。第二控制器被配置为当可容许充电电力的大小和可容许放电电力的大小中的至少一个变得小于预定值时选择降低保证模式。
本文所公开的实施例在所有方面都应被认为是示意性的而不是限制性的。本公开的范围并非由实施例的以上描述而是由权利要求示出,并且旨在包括在不脱离权利要求的精神和范围的情况下作出的所有修改。
- 混合动力车辆、行驶控制系统和控制混合动力车辆的方法
- 混合动力车辆及混合动力车辆的行驶控制方法